

Blockchain and Deep Learning-Based Fault Detection Framework for Electric Vehicles
 , , , , ,
, , , , ,  ,
,  , ,
, , 
Abstract
1. Introduction
1.1. Motivation
- Most of the existing AI-based EV fault detection frameworks mainly emphasize strengthening the privacy of EVs. However, there is no discussion on maintaining the integrity and confidentiality of EV data while considering diverse faults.
- Considering the outlook of the literature, researchers [4,5,6,7,8,9] have highlighted the integrity and transparency challenges arising in EV fault detection systems. To overcome these issues, authors [13,14,15] have applied various AI models to ensure protected EV fault detection. However, they are still vulnerable to various security attacks due to the easy forging of data in AI models. Additionally, no literature discusses the combination of faults for EVs.
- Thus, deep learning and blockchain-based EV fault detection frameworks are persuasive solutions to tackle multiple faults (air tire pressure, temperature, and battery) arising due to the intricate components of EVs. Moreover, the inclusion of 5G and IPFS strengthen EV fault detection in terms of reliability, storage costs, and scalability.
1.2. Research Contributions
- We propose a deep learning and blockchain-based EV fault detection framework considering faults, such as air tire pressure, temperature, and battery, which can occur due to the intricacy of components. Moreover, the inclusion of IPFS with the 5G network improves the scalability and reliability of fault detection for EVs.
- Furthermore, the fault detection was performed considering the various EV faults using CNN and LSTM deep learning models to predict the output, which can be further classified as faulty or not.
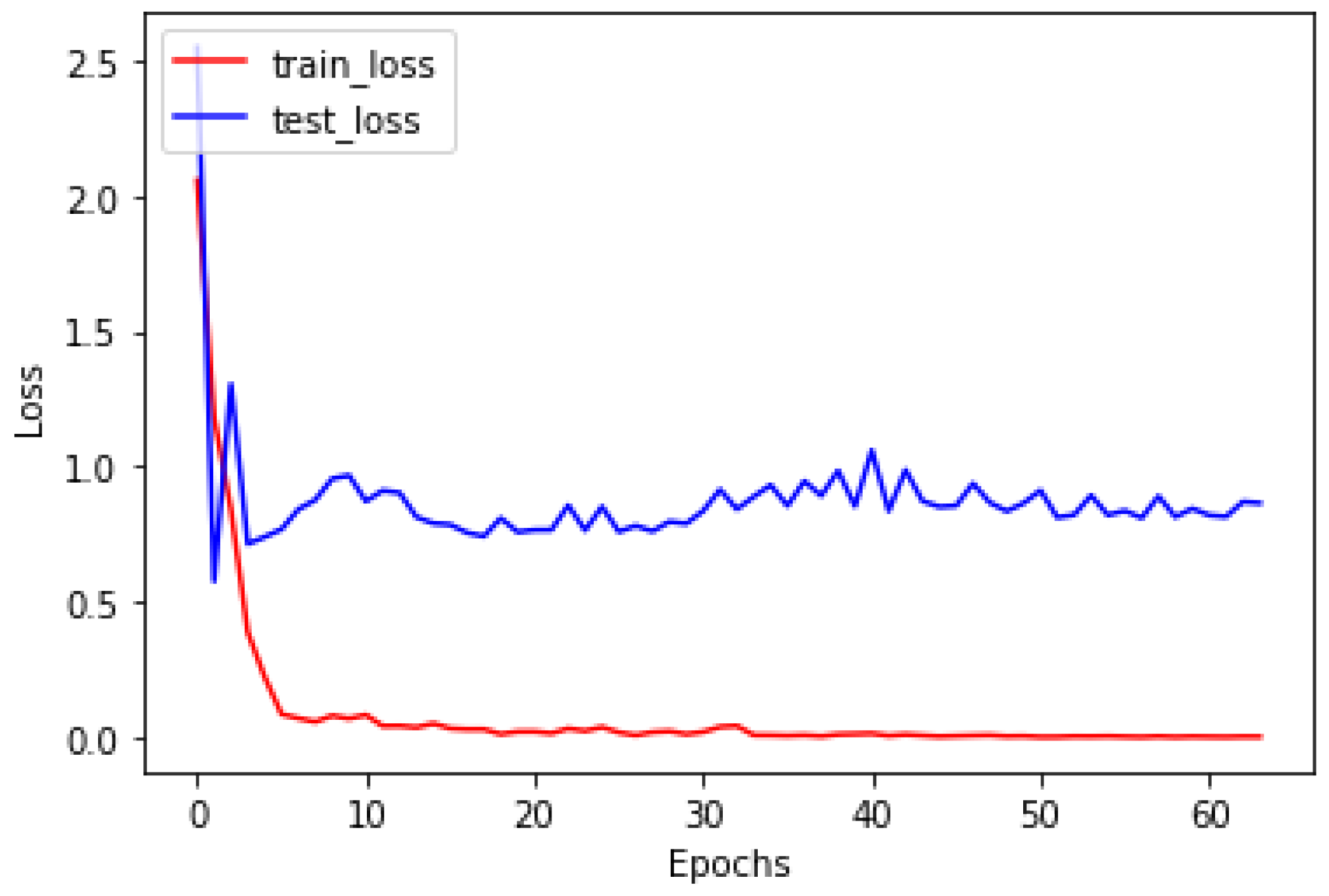
- The performance evaluation of the EV fault detection was estimated by implementing CNN and LSTM with the help of metrics, i.e., F1-score, precision, and recall. Then, we depicted the accuracy and loss curves for the various fault predictions of EVs.
1.3. Organization
2. Related Works
3. System Model and Problem Formulation
3.1. System Model
3.2. Problem Formulation
4. Proposed Framework
4.1. EV Fault Layer
4.2. Data Analytics Layer
4.2.1. Air Tire Pressure
4.2.2. Temperature Fault Analysis
4.2.3. Battery Fault Analysis
| Algorithm 1: Prediction model algorithm. |
| Input: Air pressure data , temperature data , battery data |
Output: Prediction P
|
4.3. Blockchain Layer
5. Simulation Results
5.1. Dataset Description
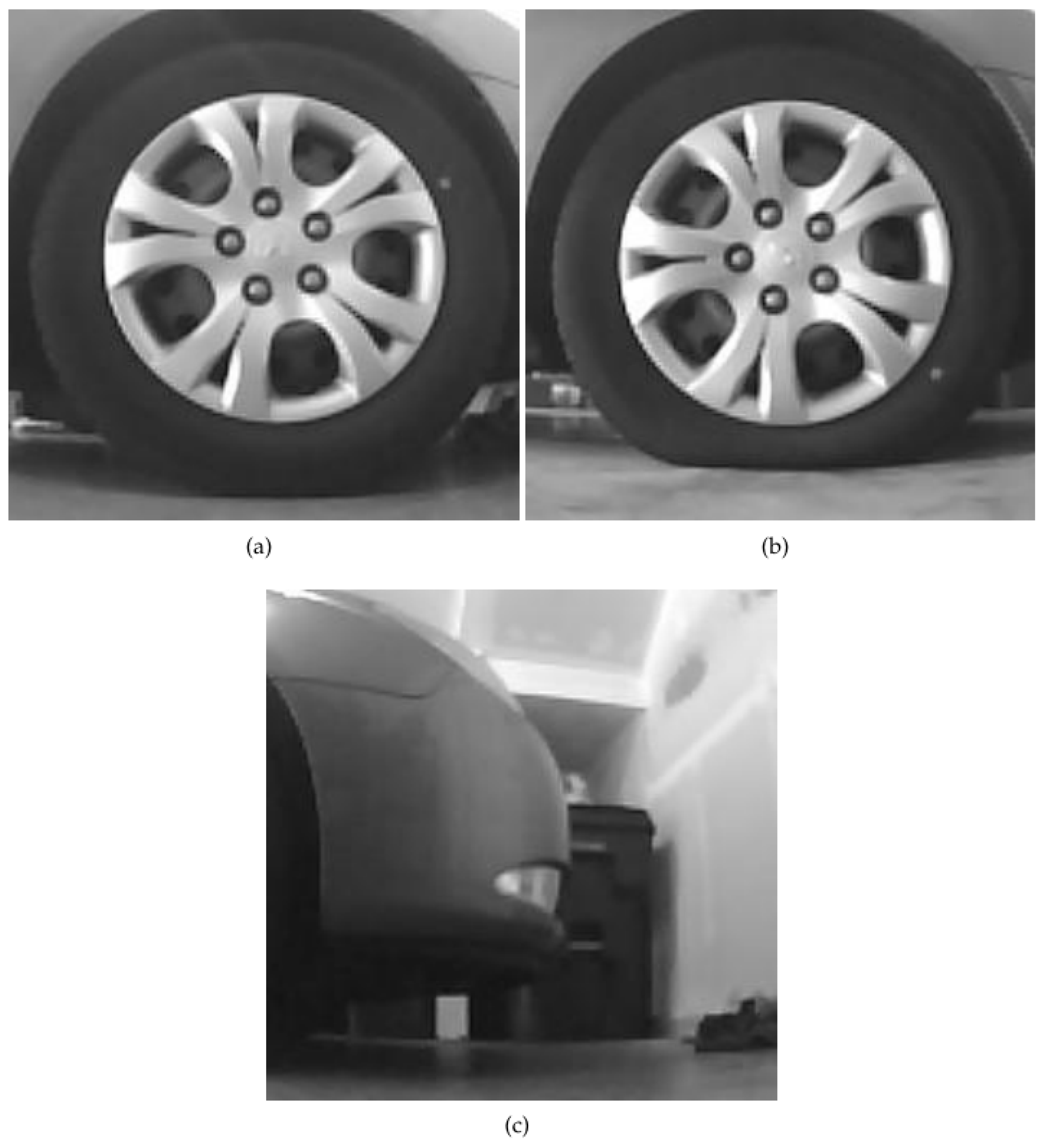
5.1.1. Air Tire Pressure Fault
5.1.2. Thermal/Temperature Fault
5.1.3. Battery Fault
5.2. Data Preprocessing
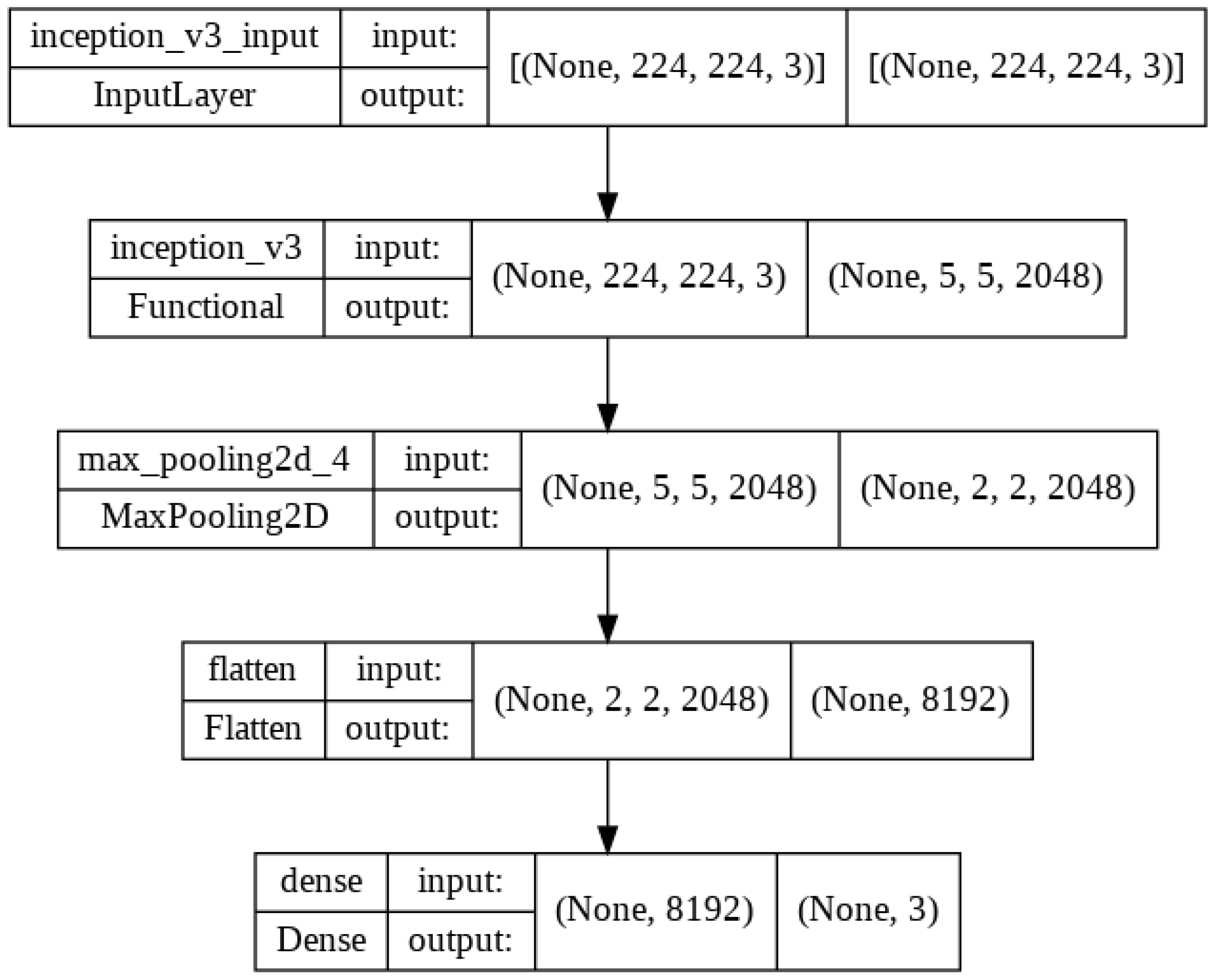
5.2.1. CNN-Based Results for Air Tire Pressure Fault
5.2.2. Anomaly Detection for Temperature Fault
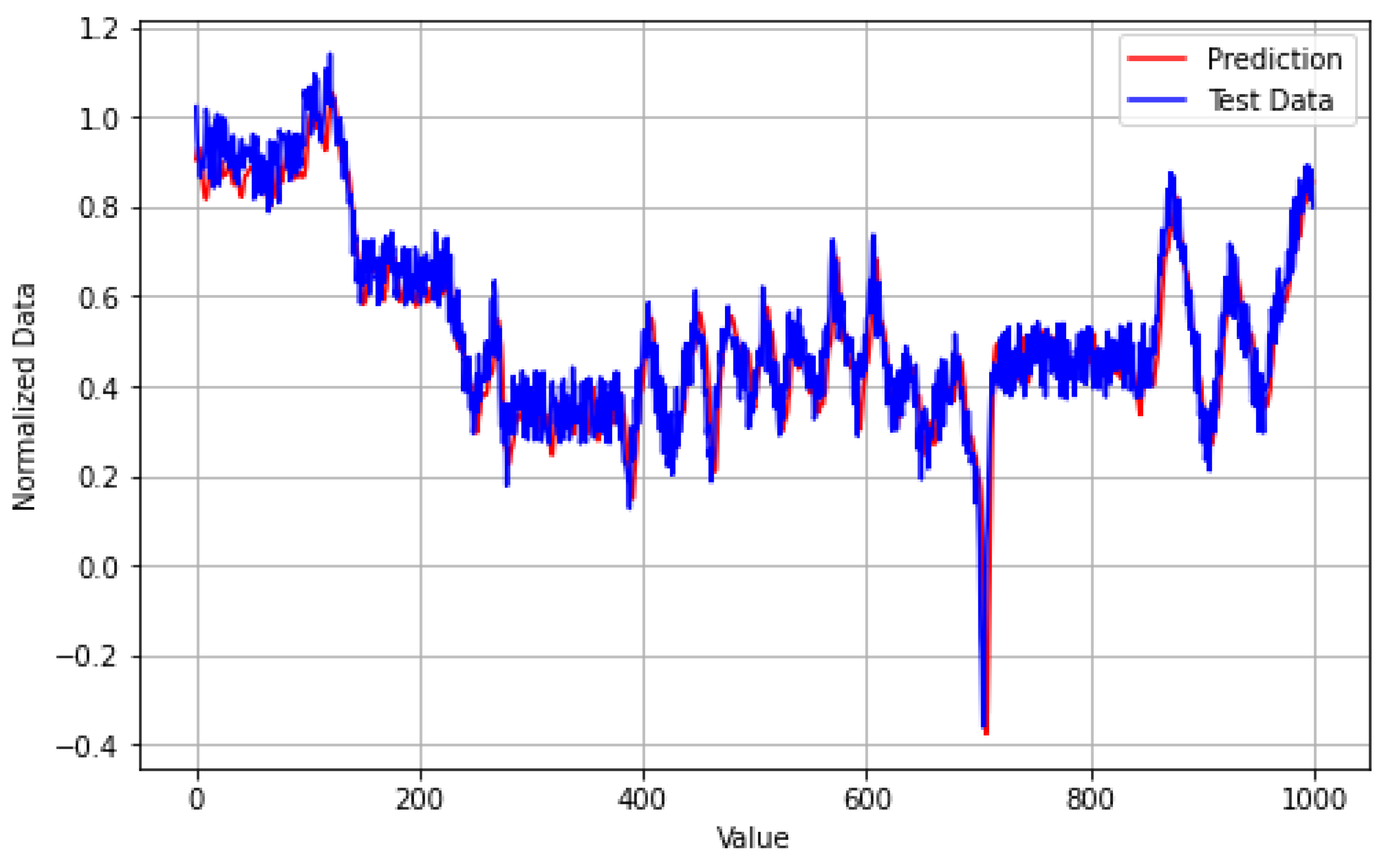
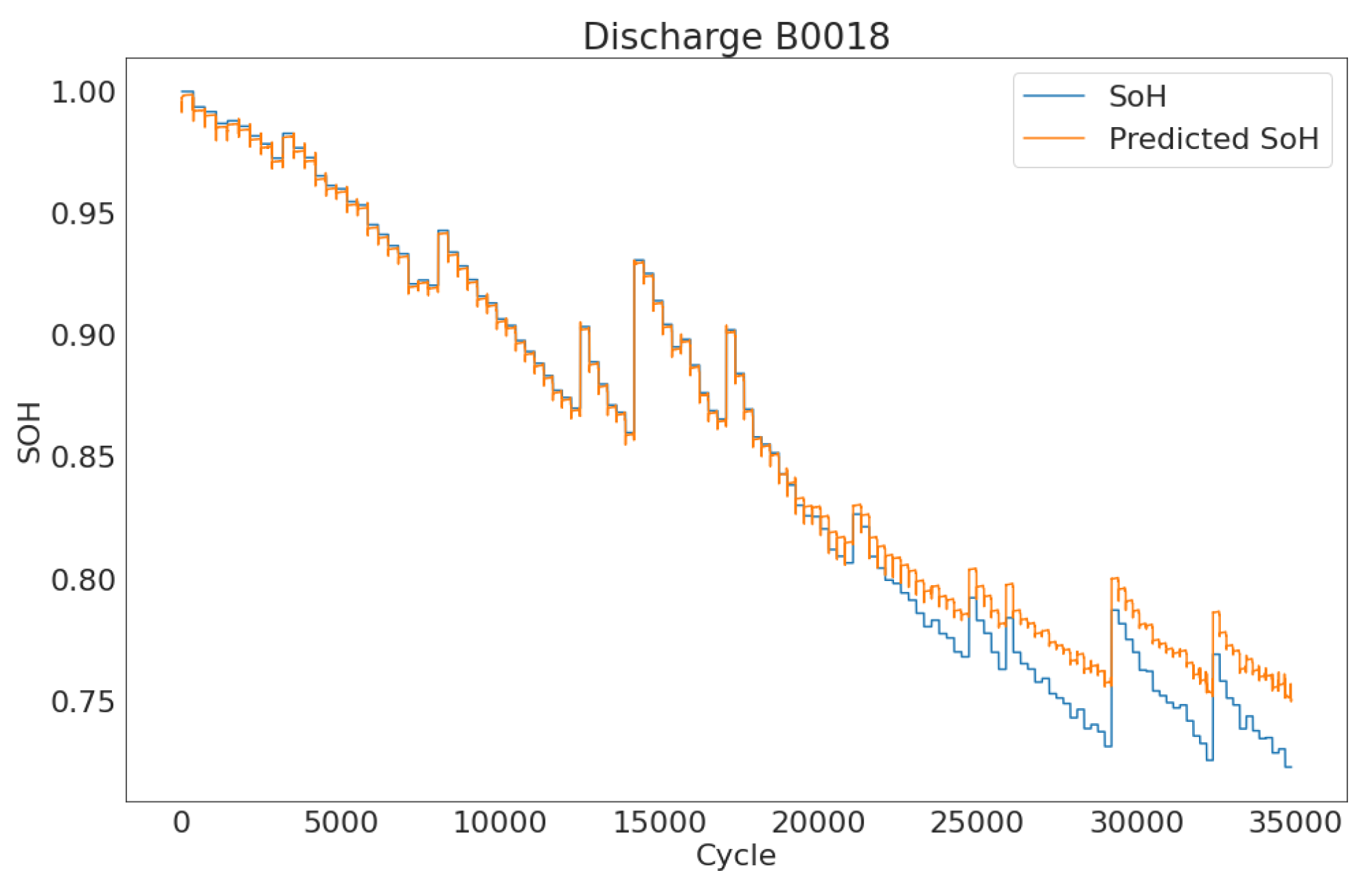
5.2.3. LSTM-Based Results for Battery Fault
5.3. Blockchain and IPFS-Based Analysis
5.3.1. Computation Time
5.3.2. Data Storage Cost Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lasla, N.; Al-Ammari, M.; Abdallah, M.; Younis, M. Blockchain Based Trading Platform for Electric Vehicle Charging in Smart Cities. IEEE Open J. Intell. Transport. Syst. 2020, 1, 80–92. [Google Scholar] [CrossRef]
- Dixit, P.; Bhattacharya, P.; Tanwar, S.; Gupta, R. Anomaly detection in autonomous electric vehicles using AI techniques: A comprehensive survey. Exp. Syst. 2022, 39, e12754. [Google Scholar] [CrossRef]
- Hashemi, M.; Golkani, M.A.; Watzenig, D. A Robust Approach for Inter-Turn Fault Detection of PMSM Used for Autonomous Vehicles. In Proceedings of the 2022 International Conference on Connected Vehicle and Expo (ICCVE), Lakeland, FL, USA, 7–9 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; López-Estrada, F.R.; Valencia-Palomo, G.; Osornio-Ríos, R.; Zepeda-Hernández, J.; Rios-Rojas, C.; Camas-Anzueto, J. Sensor fault diagnosis observer for an electric vehicle modeled as a Takagi-Sugeno system. J. Sens. 2018, 2018, 3291639. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, G.; Cui, N. Internal Short Circuit Fault Diagnosis for lithium–ion Battery Using a Novel Voltage Prediction Method. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 3252–3257. [Google Scholar] [CrossRef]
- Li, J.; Wu, Y.; Ma, S.; Li, Y.; Xu, K.; Yan, Y. Research on Fault Detection Method of LiFePO4 Battery Based on Two Dimensional Residuals. In Proceedings of the 2021 IEEE 5th Conference on Energy Internet and Energy System Integration (EI2), Taiyuan, China, 22–24 October 2021; pp. 3750–3753. [Google Scholar] [CrossRef]
- Ahooyi, S.S.; Abdollahi, F. Fault detection of lithium–ion Battery in Electric Vehicles Considering Ageing Effects. In Proceedings of the 2022 8th International Conference on Control, Instrumentation and Automation (ICCIA), Tehran, Iran, 2–3 March 2022. [Google Scholar] [CrossRef]
- Selvaraj, G.; Sadat, A.R.; Krishnamoorthy, H.S.; Rajashekara, K. An Improved Fault-Tolerant Power Converter for Electric Vehicle Propulsion. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Alvarez-Gonzalez, F.; Sierra-Gonzalez, A.; Trancho, E.; Marcos, M.A. Online Signal-Based Fault Detection and Diagnosis of EV Inverter During WLTP Driving Cycle. In Proceedings of the 2021 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 25–28 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Klink, J.; Grabow, J.; Orazov, N.; Benger, R.; Börger, A.; Ahlberg Tidblad, A.; Wenzl, H.; Beck, H.P. Thermal fault detection by changes in electrical behaviour in lithium–ion cells. J. Power Sour. 2021, 490, 229572. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Z.; Liu, P.; Qin, Z.; Chen, Y.; Han, Y.; Wang, P.; Bauer, P. An Online Data-Driven Fault Diagnosis and Thermal Runaway Early Warning for Electric Vehicle Batteries. IEEE Trans. Power Electr. 2022, 37, 12636–12646. [Google Scholar] [CrossRef]
- Kakkar, R.; Agrawal, S.; Gupta, R.; Tanwar, S. Blockchain and Zero-Sum Game-based Dynamic Pricing Scheme for Electric Vehicle Charging. In Proceedings of the IEEE INFOCOM 2022—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), New York, NY, USA, 2–5 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Li, J.; Abdollahi, A.; Jones, T. Data-driven Thermal Anomaly Detection for Batteries using Unsupervised Shape Clustering. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Erfanian, A.M.; Ramezani, A. Using Deep Learning Network for Fault Detection in UAV. In Proceedings of the 2022 8th International Conference on Control, Instrumentation and Automation (ICCIA), Tehran, Iran, 2–3 March 2022. [Google Scholar] [CrossRef]
- Ji, Y.; Lee, H. Event-Based Anomaly Detection Using a One-Class SVM for a Hybrid Electric Vehicle. IEEE Trans. Vehic. Technol. 2022, 71, 6032–6043. [Google Scholar] [CrossRef]
- Gao, X.; Yuan, G.; Zhang, M. Fault Detection of Electric Vehicle Charging Piles Based on Extreme Learning Machine Algorithm. In Proceedings of the 2020 Fourth International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 11–13 March 2020; pp. 849–852. [Google Scholar] [CrossRef]
- Basnet, M.; Poudyal, S.; Ali, M.H.; Dasgupta, D. Ransomware Detection Using Deep Learning in the SCADA System of Electric Vehicle Charging Station. In Proceedings of the 2021 IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Lima, Peru, 15–17 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Argawal, R.; Kalel, D.; Harshit, M.; Domnic, A.D.; Singh, R.R. Sensor Fault Detection using Machine Learning Technique for Automobile Drive Applications. In Proceedings of the 2021 National Power Electronics Conference (NPEC), Bhubaneswar, India, 15–17 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Javed, A.R.; Usman, M.; Rehman, S.U.; Khan, M.U.; Haghighi, M.S. Anomaly Detection in Automated Vehicles Using Multistage Attention-Based Convolutional Neural Network. IEEE Trans. Intell. Transport. Syst. 2021, 22, 4291–4300. [Google Scholar] [CrossRef]
- Sani, A.R.; Hassan, M.U.; Chen, J. Privacy Preserving Machine Learning for Electric Vehicles: A Survey. arXiv 2022, arXiv:2205.08462. [Google Scholar] [CrossRef]
- Mamun, K.A.; Islam, F.R.; Haque, R.; Chand, A.A.; Prasad, K.A.; Goundar, K.K.; Prakash, K.; Maharaj, S. Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles. Sustainability 2022, 14, 2538. [Google Scholar] [CrossRef]
- Hadraoui, H.E.; Laayati, O.; Guennouni, N.; Chebak, A.; Zegrari, M. A data-driven Model for Fault Diagnosis of Induction Motor for Electric Powertrain. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14–16 June 2022; pp. 336–341. [Google Scholar] [CrossRef]
- Kakkar, R.; Gupta, R.; Tanwar, S.; Rodrigues, J.J.P.C. Coalition Game and Blockchain-Based Optimal Data Pricing Scheme for Ride Sharing Beyond 5G. IEEE Syst. J. 2021, 1–10. [Google Scholar] [CrossRef]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar] [CrossRef]
- Abishu, H.N.; Seid, A.M.; Yacob, Y.H.; Ayall, T.; Sun, G.; Liu, G. Consensus Mechanism for Blockchain-Enabled Vehicle-to-Vehicle Energy Trading in the Internet of Electric Vehicles. IEEE Trans. Vehic. Technol. 2022, 71, 946–960. [Google Scholar] [CrossRef]
- Air Tire Pressure Dataset. Available online: https://www.kaggle.com/datasets/rhammell/full-vs-flat-tire-images (accessed on 30 June 2022).
- Lavin, A.; Ahmad, S. Evaluating Real-time Anomaly Detection Algorithms - the Numenta Anomaly Benchmark. In Proceedings of the 2015 IEEE 14th International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 9–11 December 2015. [Google Scholar]
- Battery Parameters Dataset. Available online: https://data.nasa.gov/dataset/Li-ion-Battery-Aging-Datasets/uj5r-zjdb (accessed on 28 July 2022).
- Verma, C.; Stoffová, V.; Illés, Z.; Tanwar, S.; Kumar, N. Machine Learning-Based Student’s Native Place Identification for Real-Time. IEEE Access 2020, 8, 130840–130854. [Google Scholar] [CrossRef]
- Eisenring, L. Performance Analysis of Blockchain Off-chain Data Storage Tools. Bachelor Thesis, University of Zurich Department of Informatics (IFI), Zurich, Switzerland, 2018. [Google Scholar]
- Nyaletey, E.; Parizi, R.M.; Zhang, Q.; Choo, K.K.R. BlockIPFS - Blockchain-Enabled Interplanetary File System for Forensic and Trusted Data Traceability. In Proceedings of the 2019 IEEE International Conference on Blockchain (Blockchain), Atlanta, GA, USA, 14–17 July 2019; pp. 18–25. [Google Scholar] [CrossRef]
- Shrimali, B.; Patel, H.B. Blockchain State-of-the-Art: Architecture, Use Cases, Consensus, Challenges and Opportunities. J. King Saud Univ.-Comput. Inform. Sci. 2021. [Google Scholar] [CrossRef]
- Gupta, R.; Nair, A.; Tanwar, S.; Kumar, N. Blockchain-assisted secure UAV communication in 6G environment: Architecture, opportunities, and challenges. IET Commun. 2021, 15, 1352–1367. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trending Technologies | Benefits | Challenges |
|---|---|---|
| Blockchain | Enhanced security, verifiable, immutable, end-to-end encryption, high reliability | Private keys owners are vulnerable, high energy consumption, time-consuming, high data storage issues |
| 4G networks | Data rate up to 1 Gbps, low latency (<60 ms), low cost per bit, portable, and global mobility | Slow and less efficient than 5G |
| 5G networks | High data rate (up to 10 Gbps), low latency (<1 ms), high availability, reduced energy consumption Better edge computing possibilities | Security and privacy issues, limited accessibility, compatibility issues |
| Internet Of Things | Remote data logging, fault alert system, real-time tracking features | Complex technical structure, high maintenance, need to improve security |
| Year | Authors Name | Method | Merits | Demerits |
|---|---|---|---|---|
| 2020 | Gao et al. [16] | Proposed an EV fault detection method based on the extreme machine learning algorithm | High efficiency and precision, improved accuracy | Different faults need to be identified and no focus on optimal charging |
| 2021 | Basnet et al. [17] | Presented a deep learning-based ransomware detection framework in a SCADA-based system for EV charging | Secure against malicious attacks and high accuracy | Automatic countermeasures are not discussed and no discussion on data storage cost. |
| 2021 | Li et al. [13] | Studied a data-driven approach for detecting battery thermal anomalies in EVs | High resilience to data loss and early fault detection capability | Data security issues and air tire pressure faults are not discussed |
| 2021 | Argawal et al. [18] | Discussed a machine learning method for sensor fault detection in an electric motor | High accuracy | Needs to be implemented in real-time environment |
| 2021 | Javed et al. [19] | Proposed an anomaly detection framework for automated vehicles by combining LSTM and CNN | Improved performance | Needs to be implemented in a dynamic environment and also consider other types of faults |
| 2022 | Sani et al. [20] | Studied a survey on privacy preservation techniques for EVs using machine learning techniques | Resolved security and privacy issues | Faults need to be identified and detected |
| 2022 | Mamun et al. [21] | Proposed a hybrid EV paradigm based on renewable energy resources to regulate the power supply and demand | Eco-friendly | Real-time implementation needs to be considered, should focus on improving data storage costs |
| 2022 | Hadraoui et al. [22] | Implemented an AI-based approach to perform fault detection for electric powertrain | Moderate accuracy | Information on different features can be added and should focus on identifying multiple faults |
| 2022 | The proposed framework | Proposed a blockchain and deep learning-based fault detection framework for EVs | Improved accuracy, highly secure, and reliable | - |
| Epochs | 64 |
| Learning rate | 0.001 |
| Input size | (244, 244, 3) |
| Optimizer | Adam |
| Activation function | Softmax |
| Loss function | Categorical cross-entropy |
| Epochs | 50 |
| Validation split | 0.1 |
| Batch size | 3028 |
| Input size | (21,593, 50, 5) |
| Optimizer | RMSProp |
| Loss function | MSE |
| Epochs | 50 |
| Validation split | 0.1 |
| Batch size | 25 |
| Optimizer | Adam |
| Activation | ReLU |
| Loss function | Mean absolute error |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trivedi, M.; Kakkar, R.; Gupta, R.; Agrawal, S.; Tanwar, S.; Niculescu, V.-C.; Raboaca, M.S.; Alqahtani, F.; Saad, A.; Tolba, A. Blockchain and Deep Learning-Based Fault Detection Framework for Electric Vehicles. Mathematics 2022, 10, 3626. https://doi.org/10.3390/math10193626
Trivedi M, Kakkar R, Gupta R, Agrawal S, Tanwar S, Niculescu V-C, Raboaca MS, Alqahtani F, Saad A, Tolba A. Blockchain and Deep Learning-Based Fault Detection Framework for Electric Vehicles. Mathematics. 2022; 10(19):3626. https://doi.org/10.3390/math10193626
Chicago/Turabian StyleTrivedi, Mihir, Riya Kakkar, Rajesh Gupta, Smita Agrawal, Sudeep Tanwar, Violeta-Carolina Niculescu, Maria Simona Raboaca, Fayez Alqahtani, Aldosary Saad, and Amr Tolba. 2022. "Blockchain and Deep Learning-Based Fault Detection Framework for Electric Vehicles" Mathematics 10, no. 19: 3626. https://doi.org/10.3390/math10193626
APA StyleTrivedi, M., Kakkar, R., Gupta, R., Agrawal, S., Tanwar, S., Niculescu, V.-C., Raboaca, M. S., Alqahtani, F., Saad, A., & Tolba, A. (2022). Blockchain and Deep Learning-Based Fault Detection Framework for Electric Vehicles. Mathematics, 10(19), 3626. https://doi.org/10.3390/math10193626