
Investigation of Efficient Optimization Approach to the Modernization of Francis Turbine Draft Tube Geometry


Abstract
1. Introduction
2. Methodology
2.1. Turbine Operational and Geometrical Characteristics
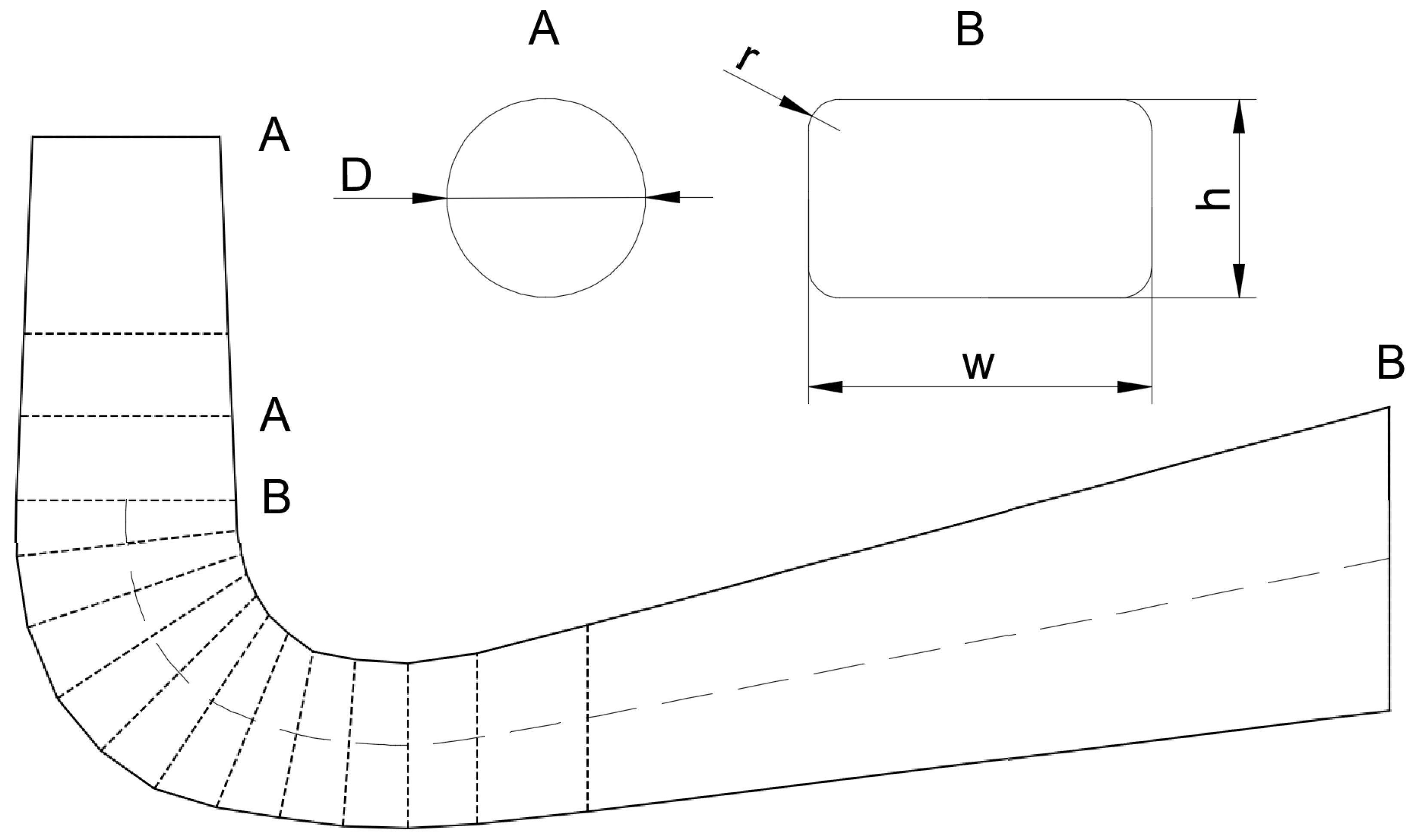
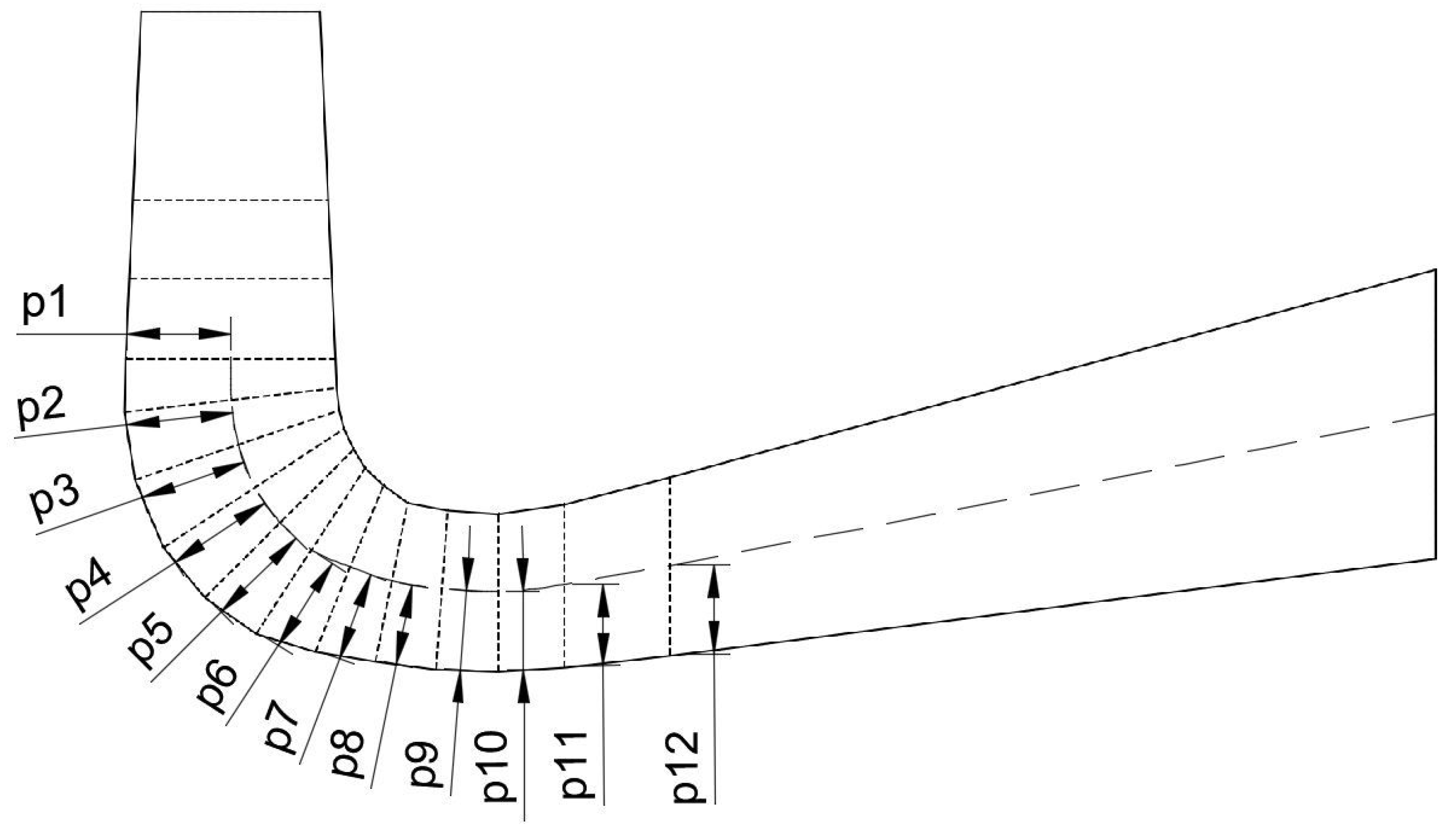
2.2. Geometry Parametrization
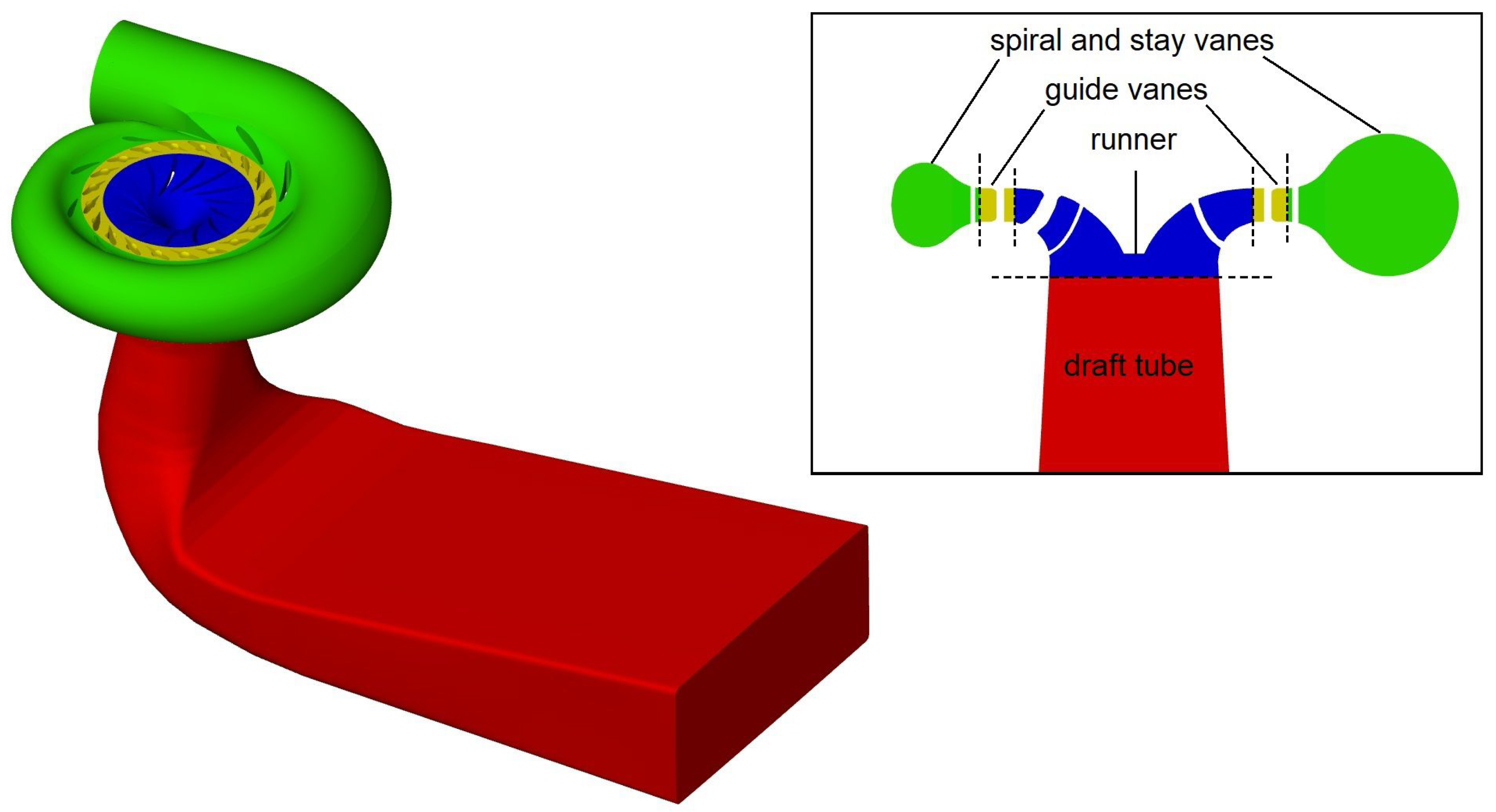
2.3. Computational Domain and Grid
2.4. Numerical Settings and Validation
2.5. Goal Function and Optimization Variables
2.6. Optimization Method
3. Results
3.1. Assessment of the Numerical Settings
3.2. Optimization Parameters Investigation
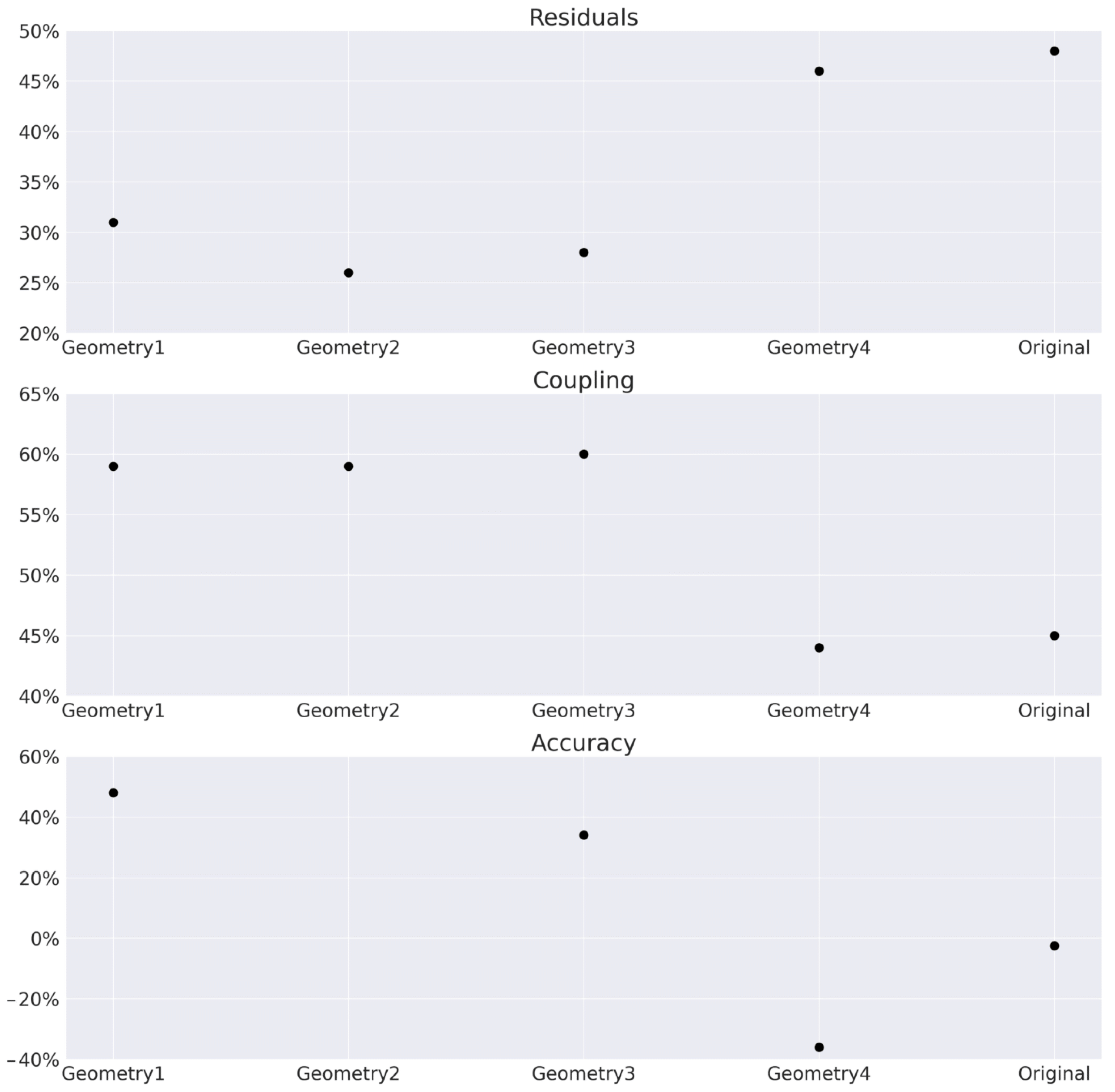
3.3. Goal Functions
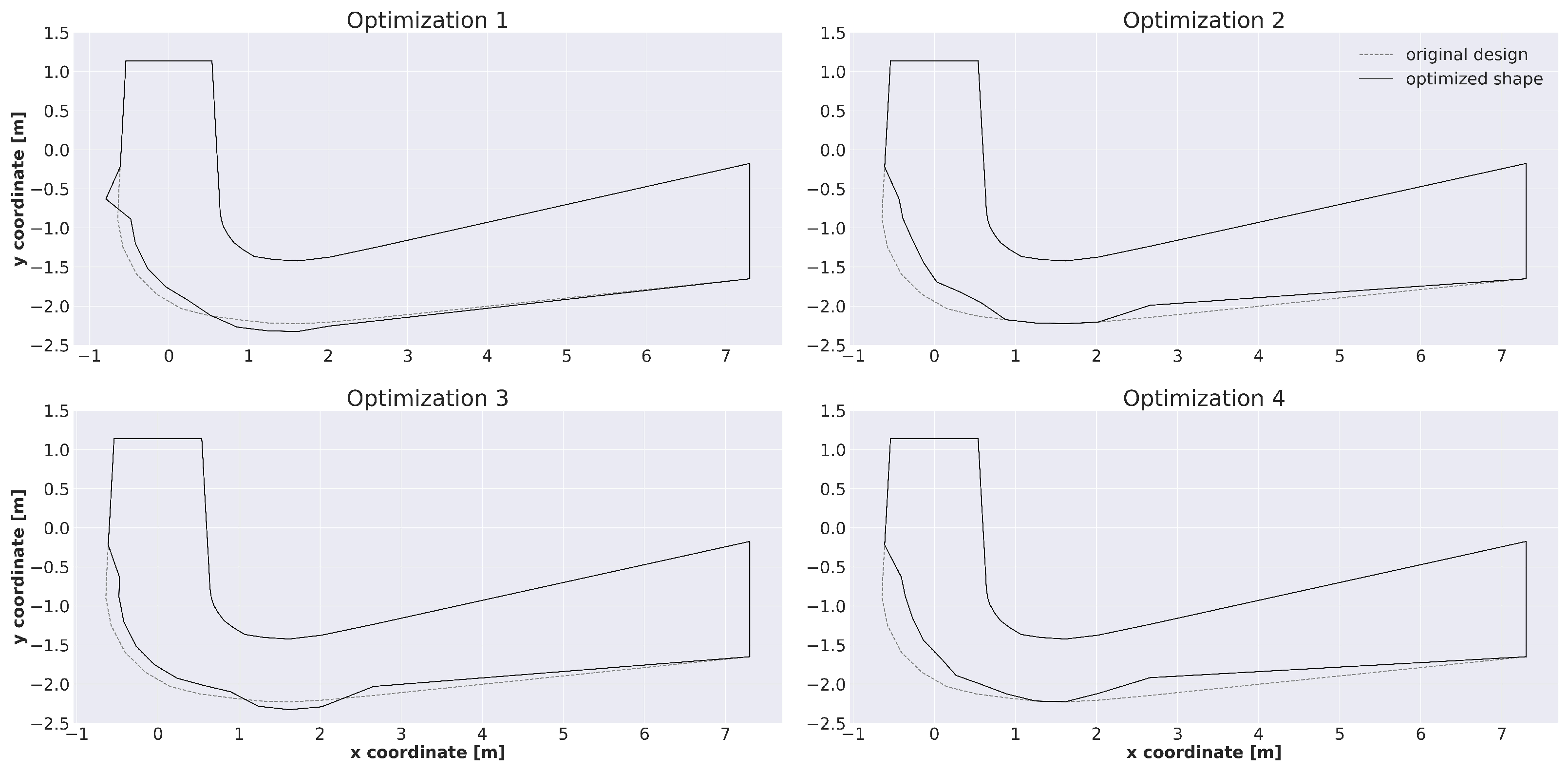
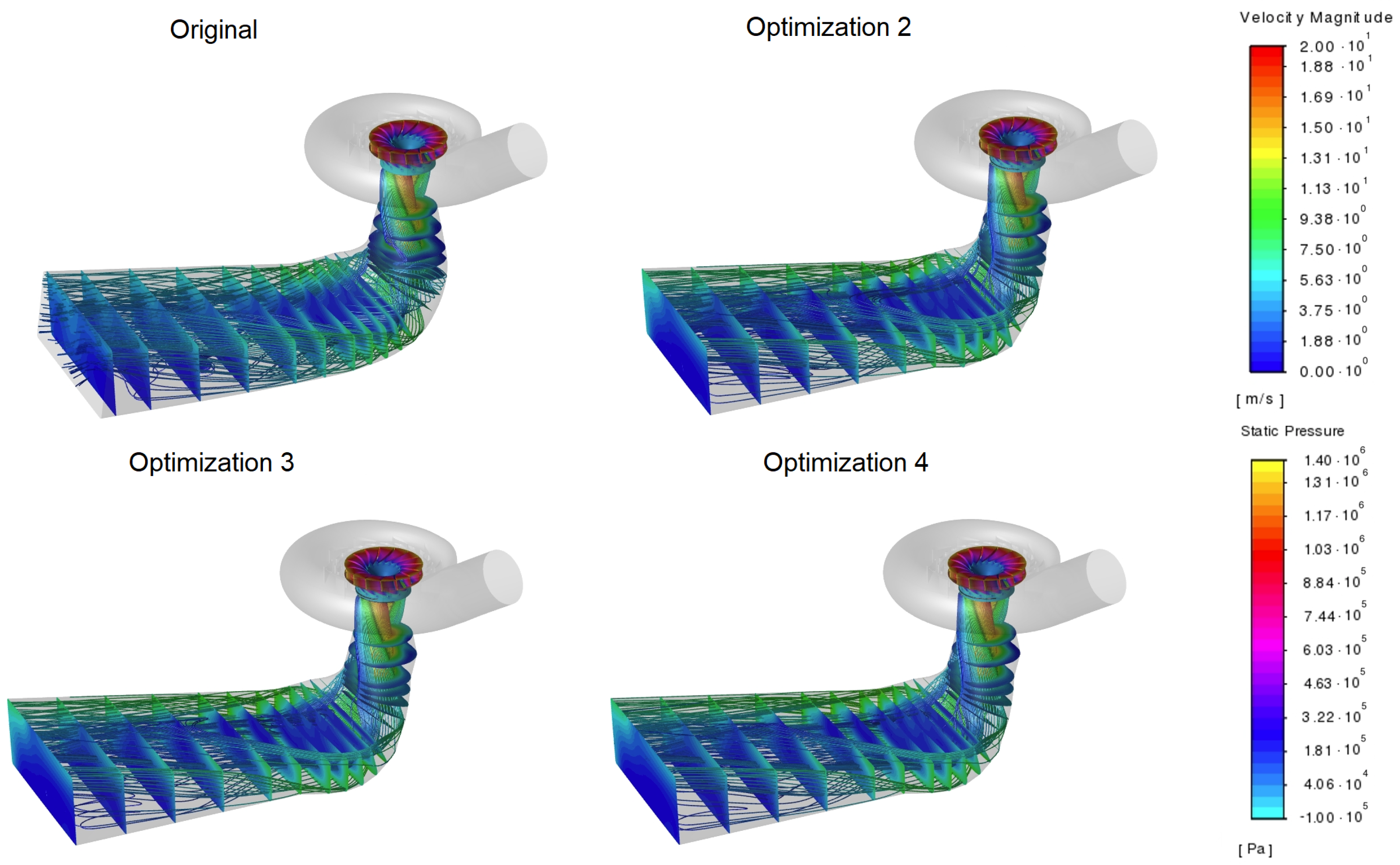
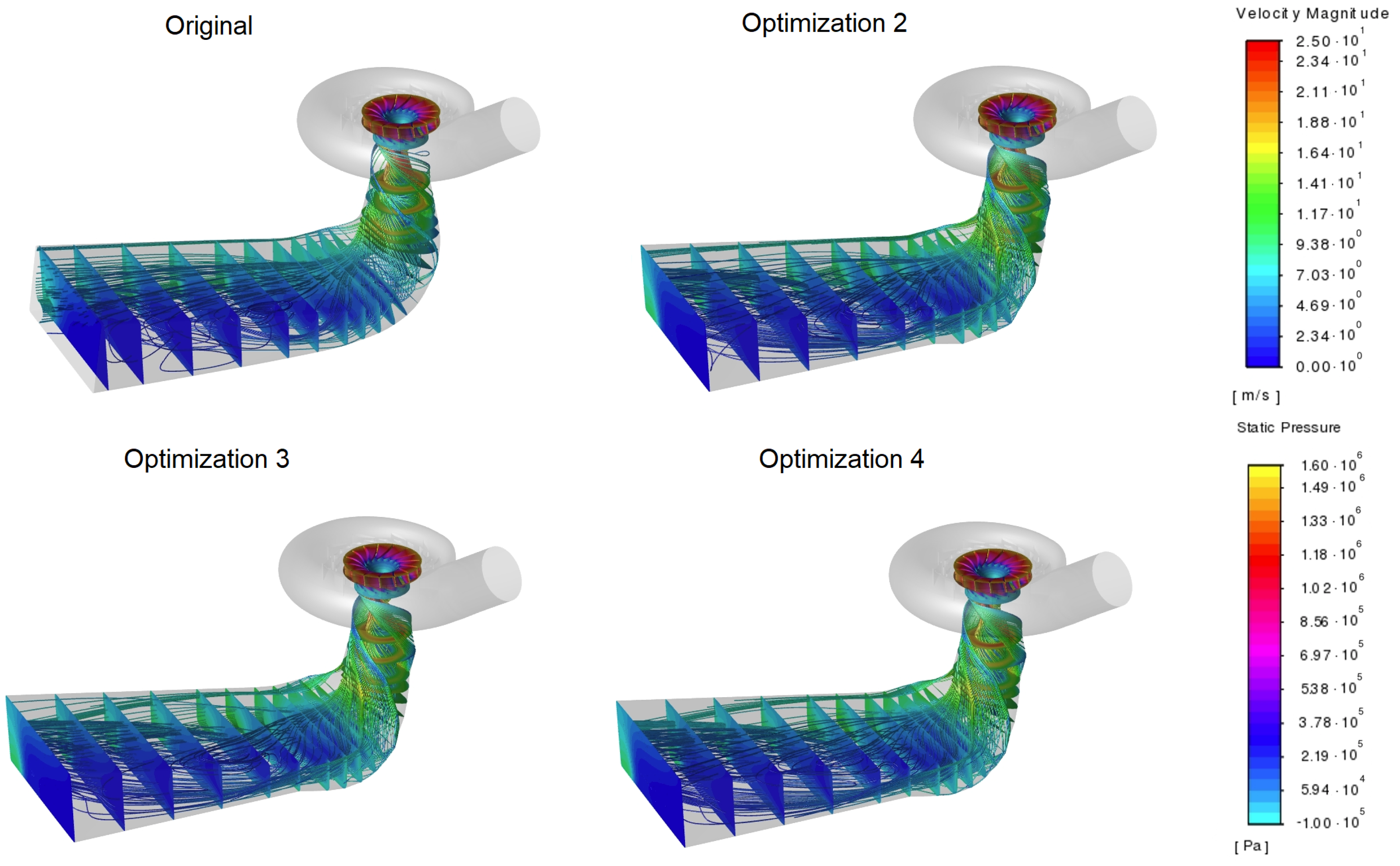
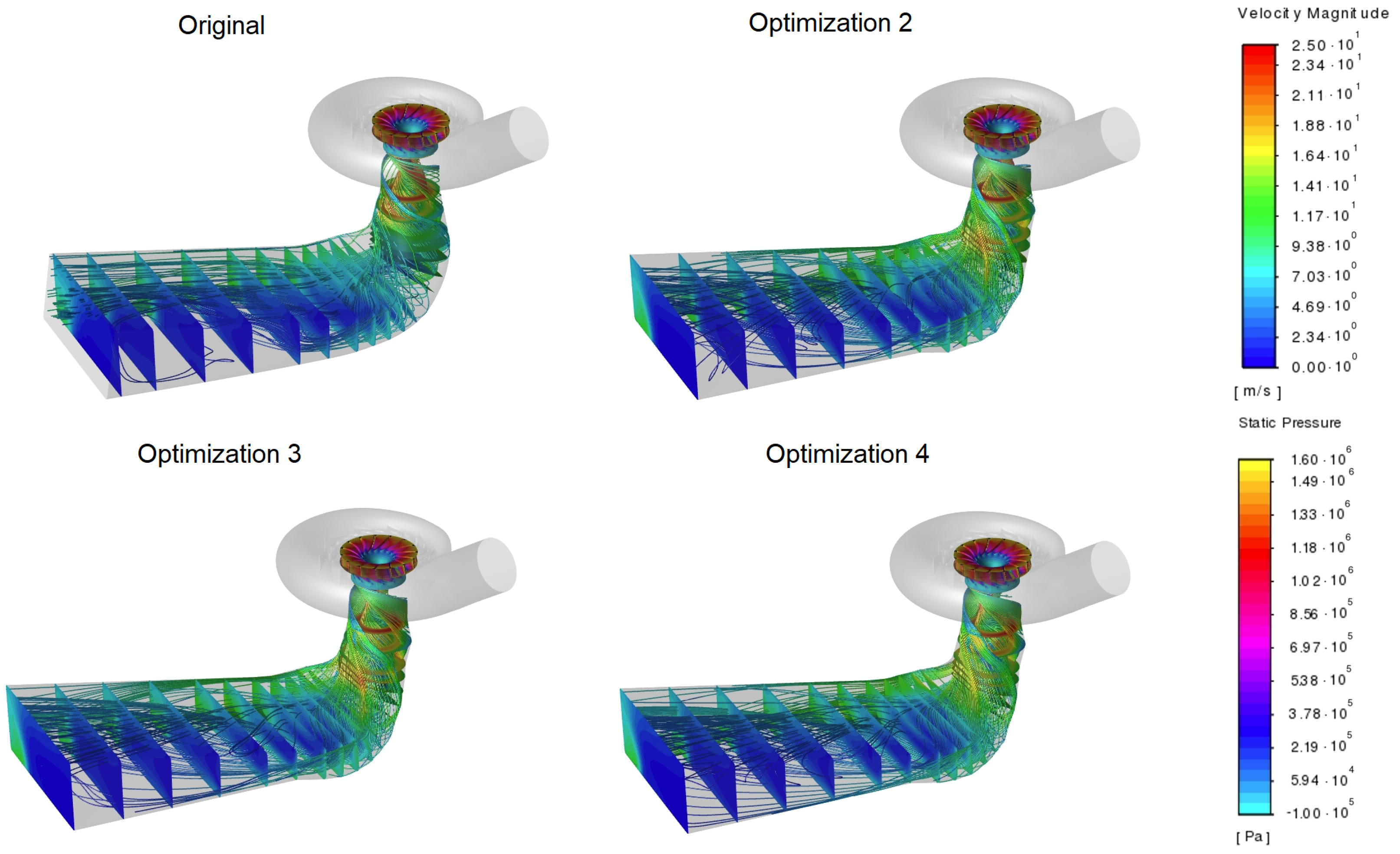
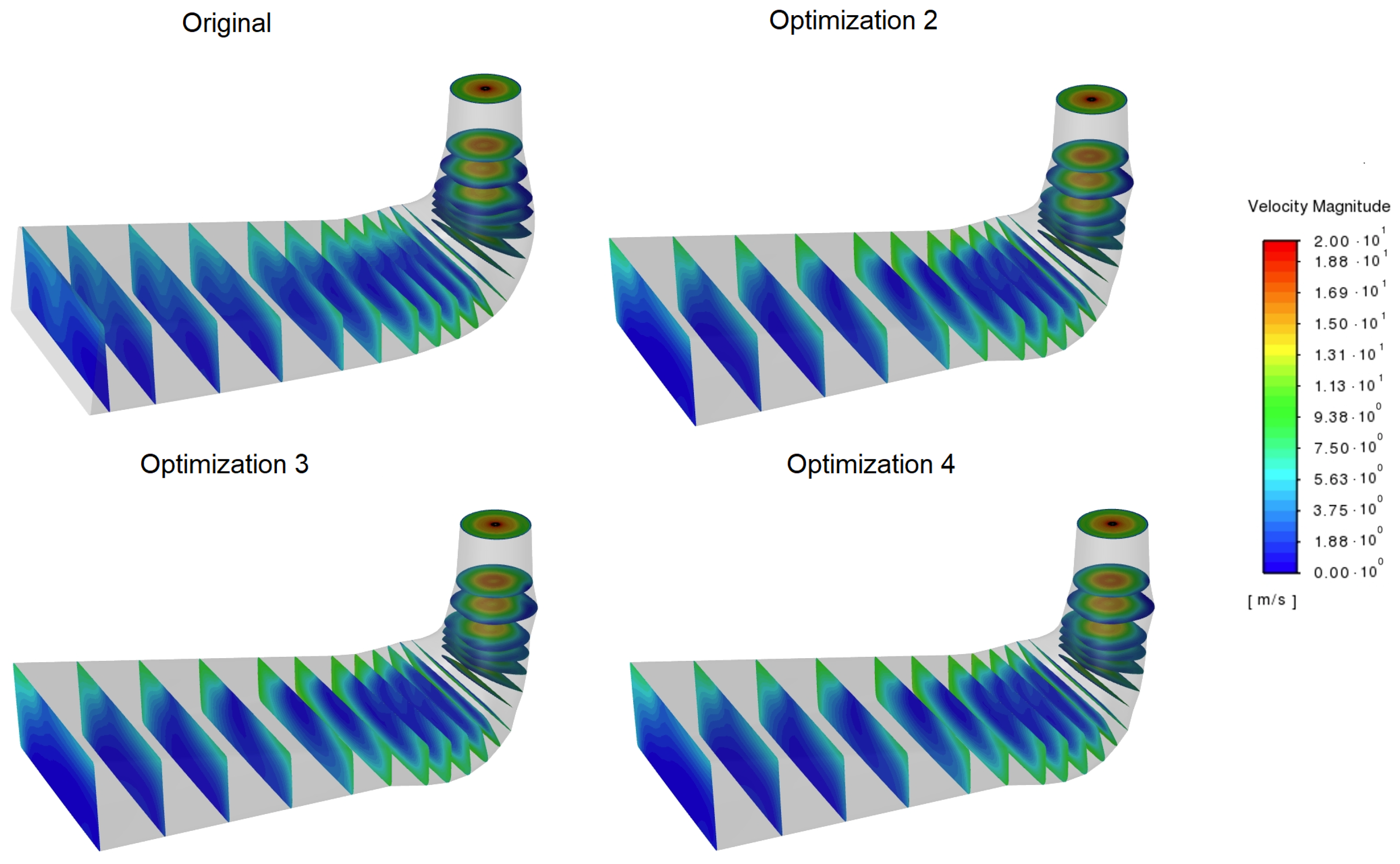
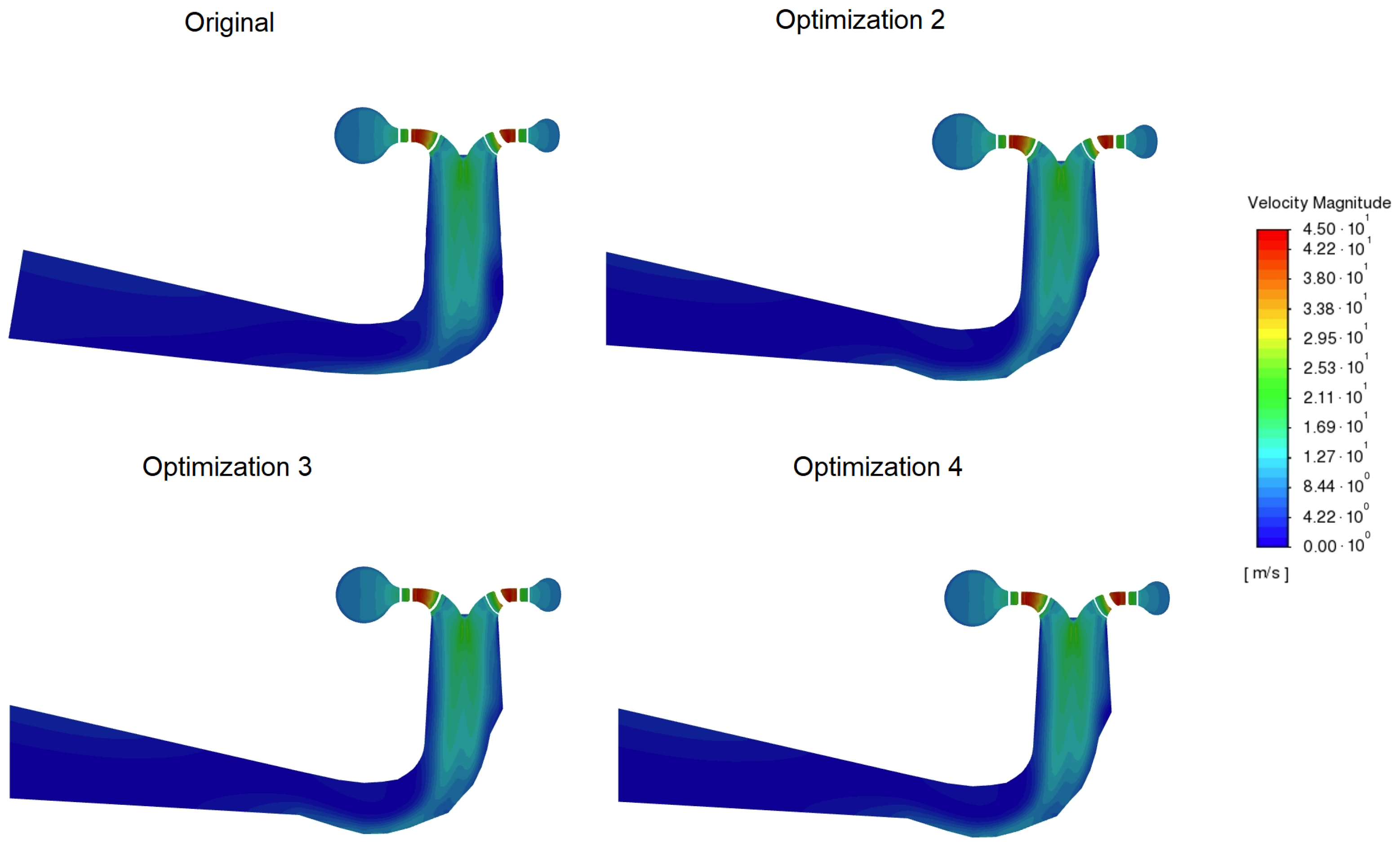
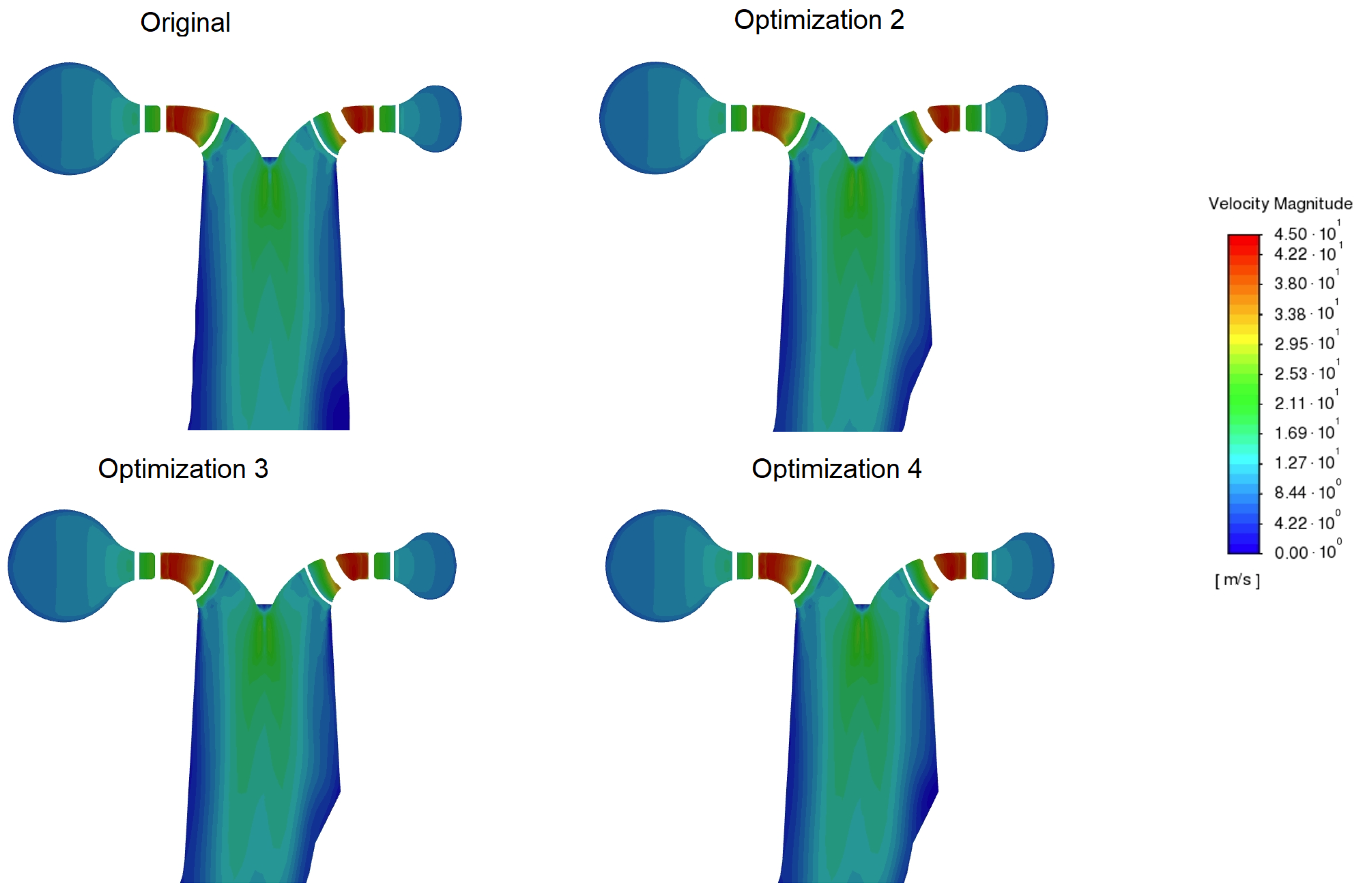
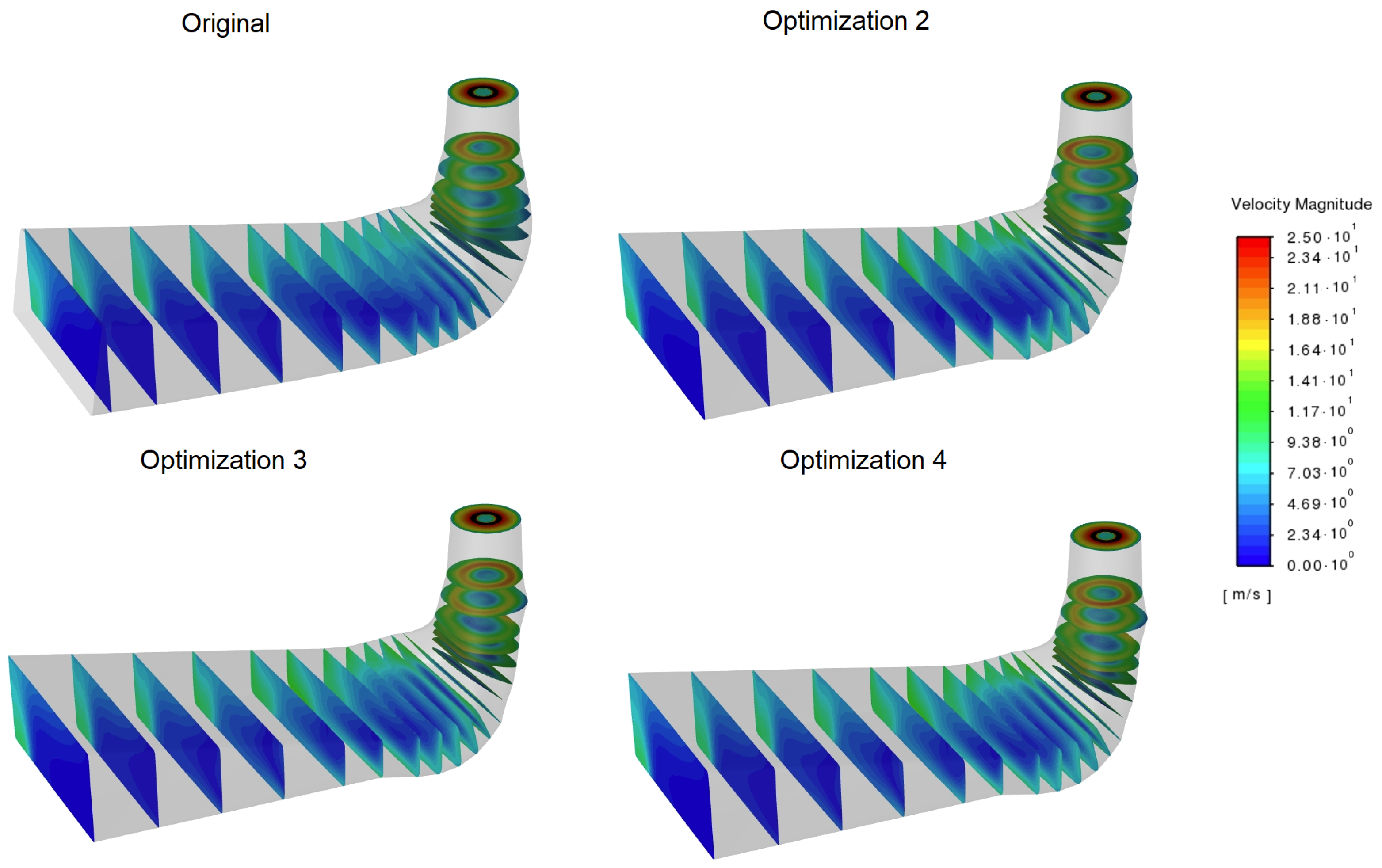
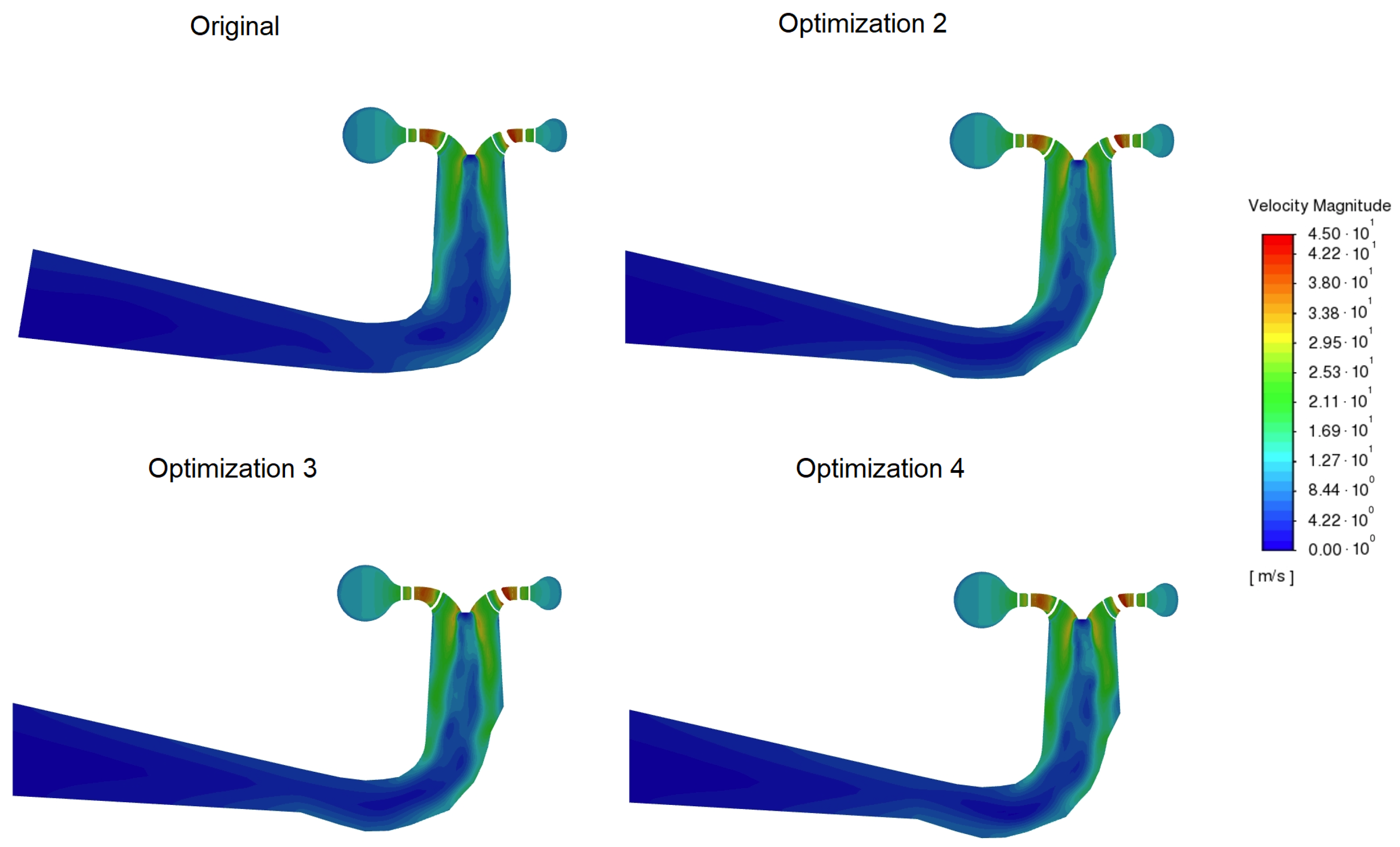
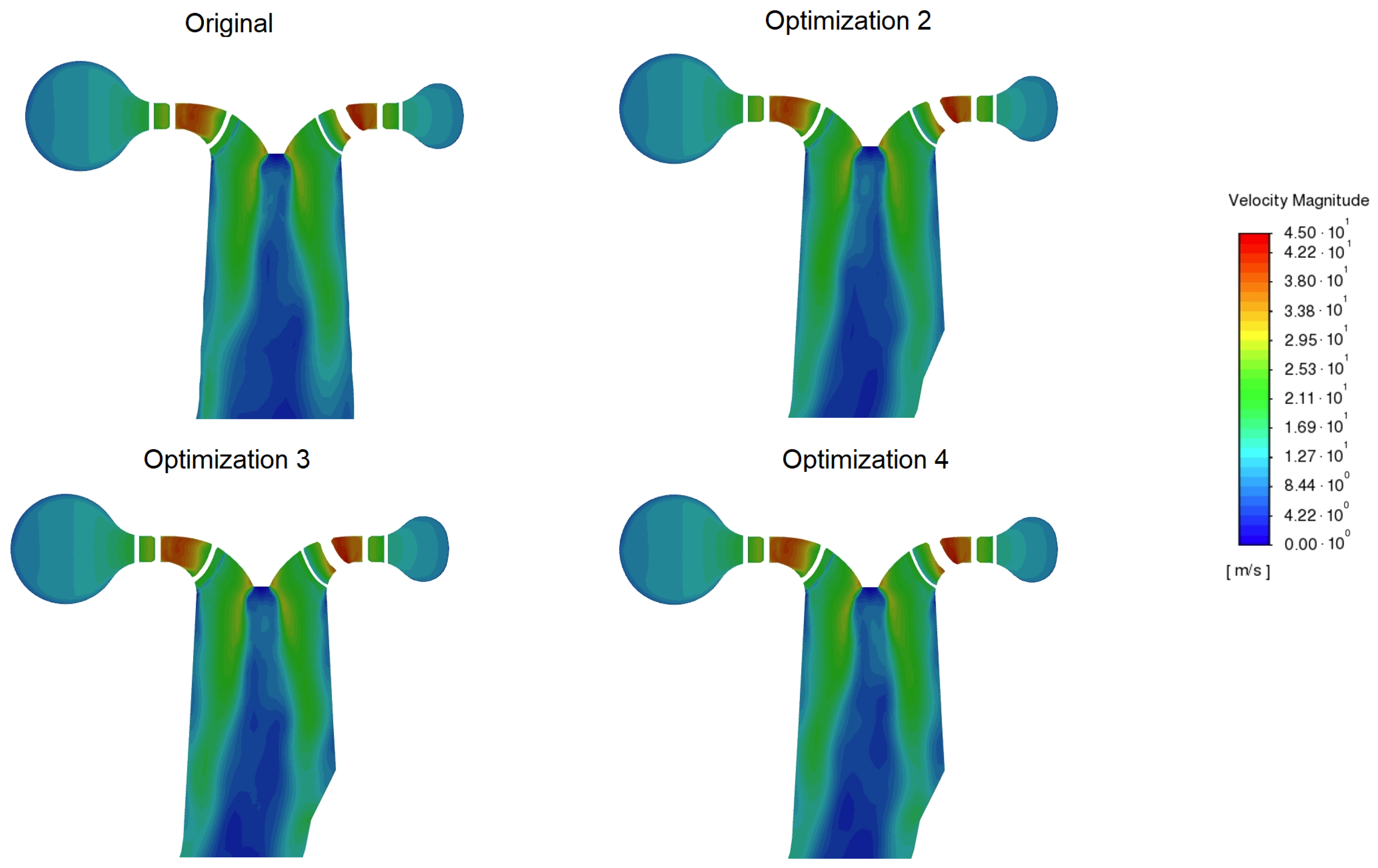
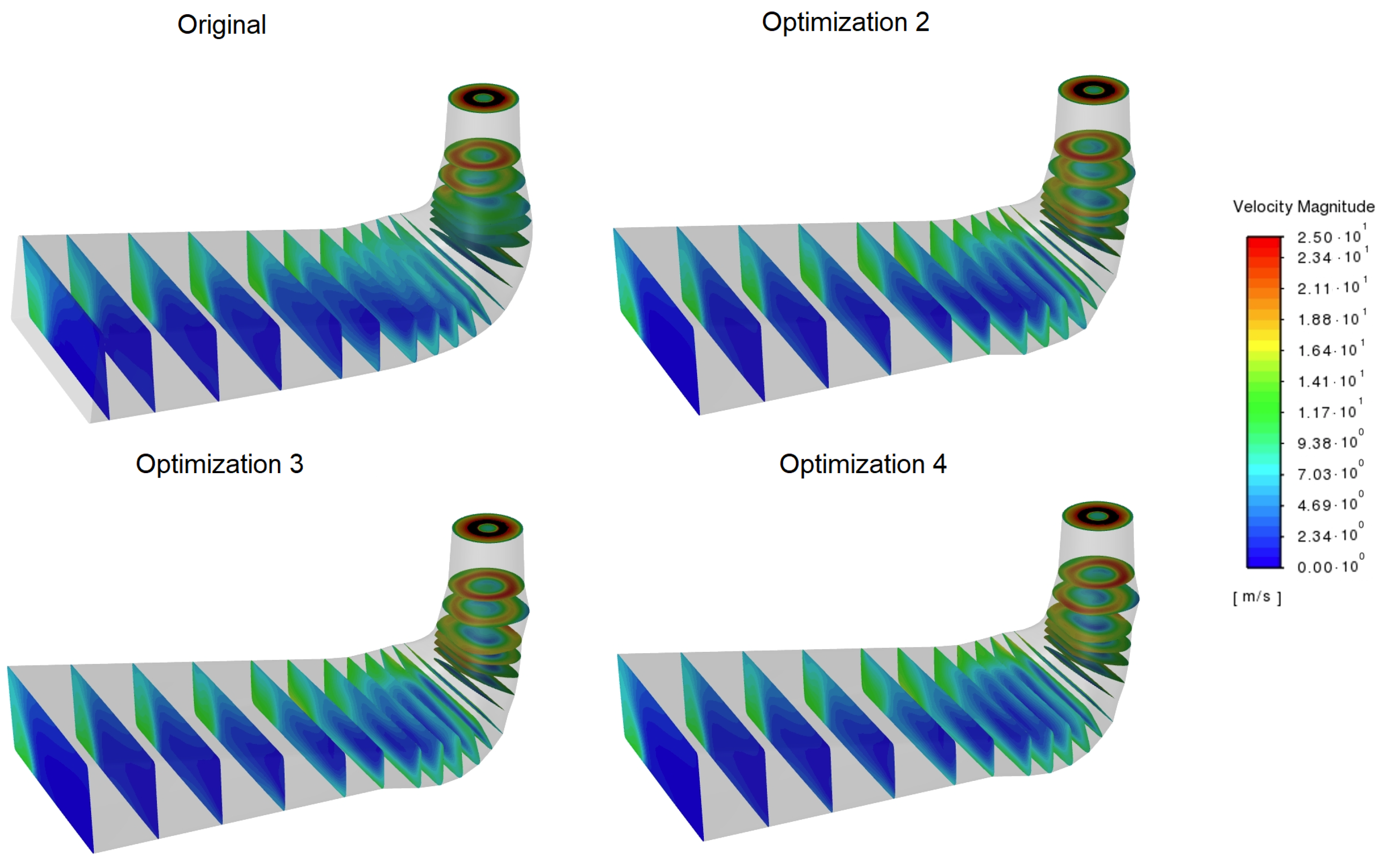
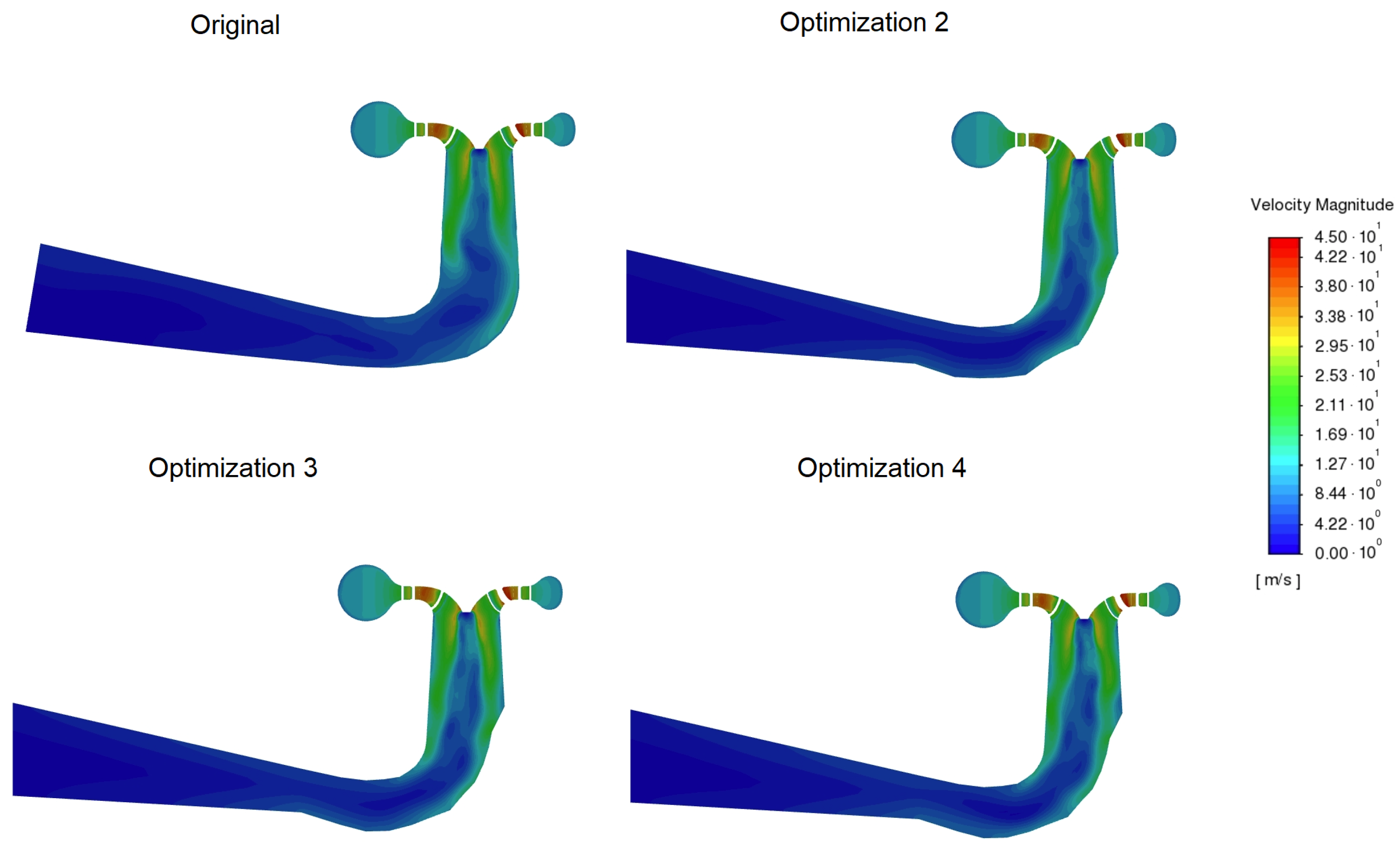
3.4. Optimized Shapes under Various Operating Conditions
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

Appendix C









References
- Gaudard, L.; Romerio, F. The future of hydropower in Europe: Interconnecting climate, markets and policies. Environ. Sci. Policy 2014, 37, 172–181. [Google Scholar] [CrossRef]
- Chae, K.J.; Kang, J. Estimating the energy independence of a municipal wastewater treatment plant incorporating green energy resources. Energy Convers. Manag. 2013, 75, 664–672. [Google Scholar] [CrossRef]
- Chae, K.J.; Kim, I.S.; Ren, X.; Cheon, K.H. Reliable energy recovery in an existing municipal wastewater treatment plant with a flow-variable micro-hydropower system. Energy Convers. Manag. 2015, 101, 681–688. [Google Scholar] [CrossRef]
- Hunt, J.D.; Zakeri, B.; Lopes, R.; Barbosa, P.S.F.; Nascimento, A.; de Castro, N.J.; Brandão, R.; Schneider, P.S.; Wada, Y. Existing and new arrangements of pumped-hydro storage plants. Renew. Sustain. Energy Rev. 2020, 129, 109914. [Google Scholar] [CrossRef]
- Liu, X.; Luo, Y.; Karney, B.W.; Wang, W. A selected literature review of efficiency improvements in hydraulic turbines. Renew. Sustain. Energy Rev. 2015, 51, 18–28. [Google Scholar] [CrossRef]
- Trivedi, C.; Cervantes, M.J.; Gunnar Dahlhaug, O. Numerical techniques applied to hydraulic turbines: A perspective review. Appl. Mech. Rev. 2016, 68, 010802. [Google Scholar] [CrossRef]
- Tiwari, G.; Kumar, J.; Prasad, V.; Patel, V.K. Utility of CFD in the design and performance analysis of hydraulic turbines—A review. Energy Rep. 2020, 6, 2410–2429. [Google Scholar] [CrossRef]
- Flores, E.; Bornard, L.; Tomas, L.; Liu, J.; Couston, M. Design of large Francis turbine using optimal methods. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2012; Volume 15, p. 022023. [Google Scholar]
- Abbas, A.; Kumar, A. Development of draft tube in hydro-turbine: A review. Int. J. Ambient Energy 2017, 38, 323–330. [Google Scholar] [CrossRef]
- Sosa, J.; Urquiza, G.; García, J.; Castro, L. Computational fluid dynamics simulation and geometric design of hydraulic turbine draft tube. Adv. Mech. Eng. 2015, 7, 1687814015606307. [Google Scholar] [CrossRef]
- Amano, R.S.; Abbas, A. Optimization of intake and draft tubes of a Kaplan micro hydro-turbine. In Proceedings of the 15th International Energy Conversion Engineering Conference, Atlanta, GA, USA, 10–12 July 2017; p. 4807. [Google Scholar]
- Schiffer, J.; Benigni, H.; Jaberg, H. An analysis of the impact of draft tube modifications on the performance of a Kaplan turbine by means of computational fluid dynamics. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 1937–1952. [Google Scholar] [CrossRef]
- Arispe, T.M.; de Oliveira, W.; Ramirez, R.G. Francis turbine draft tube parameterization and analysis of performance characteristics using CFD techniques. Renew. Energy 2018, 127, 114–124. [Google Scholar] [CrossRef]
- Chol Nam, M.; Ba, D.; Yue, X.; Jin, M. Design optimization of hydraulic turbine draft tube based on CFD and DOE method. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 136, p. 012019. [Google Scholar]
- Favrel, A.; Lee, N.j.; Irie, T.; Miyagawa, K. Design of Experiments Applied to Francis Turbine Draft Tube to Minimize Pressure Pulsations and Energy Losses in Off-Design Conditions. Energies 2021, 14, 3894. [Google Scholar] [CrossRef]
- Kawajiri, H.; Enomoto, Y.; Kurosawa, S. Design optimization method for Francis turbine. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2014; Volume 22, p. 012026. [Google Scholar]
- McNabb, J.; Devals, C.; Kyriacou, S.; Murry, N.; Mullins, B. CFD based draft tube hydraulic design optimization. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2014; Volume 22, p. 012023. [Google Scholar]
- Eisinger, R.; Ruprecht, A. Automatic shape optimization of hydro turbine components based on CFD. TASK Q 2002, 6, 101–111. [Google Scholar]
- Fleischli, B.; Del Rio, A.; Casartelli, E.; Mangani, L.; Mullins, B.; Devals, C.; Melot, M. Application of a General Discrete Adjoint Method for Draft Tube Optimization. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 774, p. 012012. [Google Scholar]
- Moravec, P.; Rudolf, P. Application of a particle swarm optimization for shape optimization in hydraulic machinery. EPJ Web Conf. 2017, 143, 02076. [Google Scholar] [CrossRef]
- Lyutov, A.; Chirkov, D.; Skorospelov, V.; Turuk, P.; Cherny, S. Coupled multipoint shape optimization of runner and draft tube of hydraulic turbines. J. Fluids Eng. 2015, 137. [Google Scholar] [CrossRef]
- Bonacci, O.; Oštrić, M.; Bonacci, T.R. Water resources analysis of the Rječina karst spring and river (Dinaric karst). Acta Carsol. 2018, 47, 123–137. [Google Scholar] [CrossRef]
- Skotak, A.; Mikulasek, J.; Obrovsky, J. Development of the new high specific speed fixed blade turbine runner. Int. J. Fluid Mach. Syst. 2009, 2, 392–399. [Google Scholar] [CrossRef]
- Puente, L.; Reggio, M.; Guibault, F. Automatic shape optimization of a hydraulic turbine draft tube. In Proceedings of the International Conference, CFD2003, Vancouver, BC, Canada, 28–30 May 2003; Volume 28. [Google Scholar]
- Orso, R.; Benini, E.; Minozzo, M.; Bergamin, R.; Magrini, A. Two-objective optimization of a Kaplan turbine draft tube using a Response Surface Methodology. Energies 2020, 13, 4899. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Čarija, Z.; Mrša, Z.; Fućak, S. Validation of Francis water turbine CFD simulations. Stroj. Časopis Teor. Praksu Stroj. 2008, 50, 5–14. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Tan, Y.; Zhu, Y. Fireworks algorithm for optimization. In Proceedings of the International Conference in Swarm Intelligence, Beijing, China, 12–15 June 2010; pp. 355–364. [Google Scholar]
- Jain, M.; Singh, V.; Rani, A. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2019, 44, 148–175. [Google Scholar] [CrossRef]
- Tanabe, R.; Fukunaga, A.S. Improving the search performance of SHADE using linear population size reduction. In Proceedings of the 2014 IEEE congress on evolutionary computation (CEC), Beijing, China, 6–11 July 2014; pp. 1658–1665. [Google Scholar]
- Družeta, S.; Ivić, S. Indago—Python Module for Numerical Optimization. Available online: https://pypi.org/project/Indago/ (accessed on 12 January 2022).
- Daniels, S.; Rahat, A.; Tabor, G.; Fieldsend, J.; Everson, R. Shape optimisation of the sharp-heeled Kaplan draft tube: Performance evaluation using Computational Fluid Dynamics. Renew. Energy 2020, 160, 112–126. [Google Scholar] [CrossRef]
- Nakamura, K.; Kurosawa, S. Design optimization of a high specific speed Francis turbine using multi-objective genetic algorithm. Int. J. Fluid Mach. Syst. 2009, 2, 102–109. [Google Scholar] [CrossRef]
- Chirkov, D.V.; Ankudinova, A.S.; Kryukov, A.E.; Cherny, S.G.; Skorospelov, V.A. Multi-objective shape optimization of a hydraulic turbine runner using efficiency, strength and weight criteria. Struct. Multidiscip. Optim. 2018, 58, 627–640. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Type | No. Elements |
|---|---|
| hexahedral | 646029 |
| polyhedral-hexahedral | 242106 |
| polyhedral | 288872 |
| tetrahedral | 1052053 |
| Mesh | Min Size | Max Size | No. | ||||
|---|---|---|---|---|---|---|---|
| [mm] | [mm] | Elements | e [%] | GCI [%] | e [%] | GCI [%] | |
| Coarse | 0.1 | 100 | 242106 | - | - | - | - |
| Medium | 0.066 | 66.6 | 428295 | 6.465 | 1.421 | 4.289 | 8.140 |
| Fine | 0.044 | 44.4 | 967650 | 0.976 | 0.172 | 2.521 | 4.784 |
| Case 1 | Case 2 | |
|---|---|---|
| Inlet | mass-flow inlet | velocity profile |
| Outlet | pressure outlet | pressure outlet |
| Wall | no-slip | no-slip |
| Symmetry | yes | - |
| Assessment | Numerical Schemes | Residuals | PV Coupling |
|---|---|---|---|
| Numerical schemes | Second order Blended second order | 10/10 | Coupled |
| Residuals | Blended second order | 10/10 10 | Coupled |
| PV coupling | Blended second order | 10/10 | SIMPLE Coupled |
| Goal Function | Bounds | |
|---|---|---|
| Algorithm | Swarm Size/Population | Parameters |
|---|---|---|
| PSO | 20 30 40 | indago defaults |
| FWA | 20 30 40 | indago defaults |
| SSA | 20 30 40 | indago defaults |
| LSHADE | 60 90 | indago defaults |
| Parameter | Value |
|---|---|
| Mesh type | Polyhedral-hexaedral |
| Numerical schemes | Second order with blending factor 0.5 |
| PV coupling | Coupled |
| Iterations | 2000 |
| Residuals | 10/10 |
| Convergence criteria | Time cut-off after 15 min |
| Residuals | |
| SD within 5% for the final 20% of the results |
| Case | Improvement | |
|---|---|---|
| - | ||
| 5.4% | 15.3% | |
| 7% | 17.2% | |
| 8.2% | 17.5% | |
| Flow Rate | Case | Improvement | |
|---|---|---|---|
| 12.8 m/s | - | ||
| −4.9% | −4.5% | ||
| −6.2% | −6.7% | ||
| −5.1% | −5.1% | ||
| 14.3 m/s | - | ||
| −9.2% | −7.1% | ||
| −9% | −7.9% | ||
| −9.5% | −8.2% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lučin, I.; Sikirica, A.; Šiško Kuliš, M.; Čarija, Z. Investigation of Efficient Optimization Approach to the Modernization of Francis Turbine Draft Tube Geometry. Mathematics 2022, 10, 4050. https://doi.org/10.3390/math10214050
Lučin I, Sikirica A, Šiško Kuliš M, Čarija Z. Investigation of Efficient Optimization Approach to the Modernization of Francis Turbine Draft Tube Geometry. Mathematics. 2022; 10(21):4050. https://doi.org/10.3390/math10214050
Chicago/Turabian StyleLučin, Ivana, Ante Sikirica, Marija Šiško Kuliš, and Zoran Čarija. 2022. "Investigation of Efficient Optimization Approach to the Modernization of Francis Turbine Draft Tube Geometry" Mathematics 10, no. 21: 4050. https://doi.org/10.3390/math10214050
APA StyleLučin, I., Sikirica, A., Šiško Kuliš, M., & Čarija, Z. (2022). Investigation of Efficient Optimization Approach to the Modernization of Francis Turbine Draft Tube Geometry. Mathematics, 10(21), 4050. https://doi.org/10.3390/math10214050