

Performance of a Vector-Controlled PMSM Drive without Using Current Sensors





Abstract
:1. Introduction
- ➢
- A current sensorless algorithm for a PMSM drive;
- ➢
- An algorithm that is independent of an integrator and differentiator terms;
- ➢
- The algorithm can be applied with a low-resolution speed sensor;
- ➢
- The overall drive cost can be reduced for low-precession applications;
- ➢
- Has a reduced current sensor dependency;
- ➢
- The proposed current estimation method can be used to make the existing PMSM drives (which use all of the current sensors) fault-tolerant against failure of the current sensors.
2. Modeling of PMSM
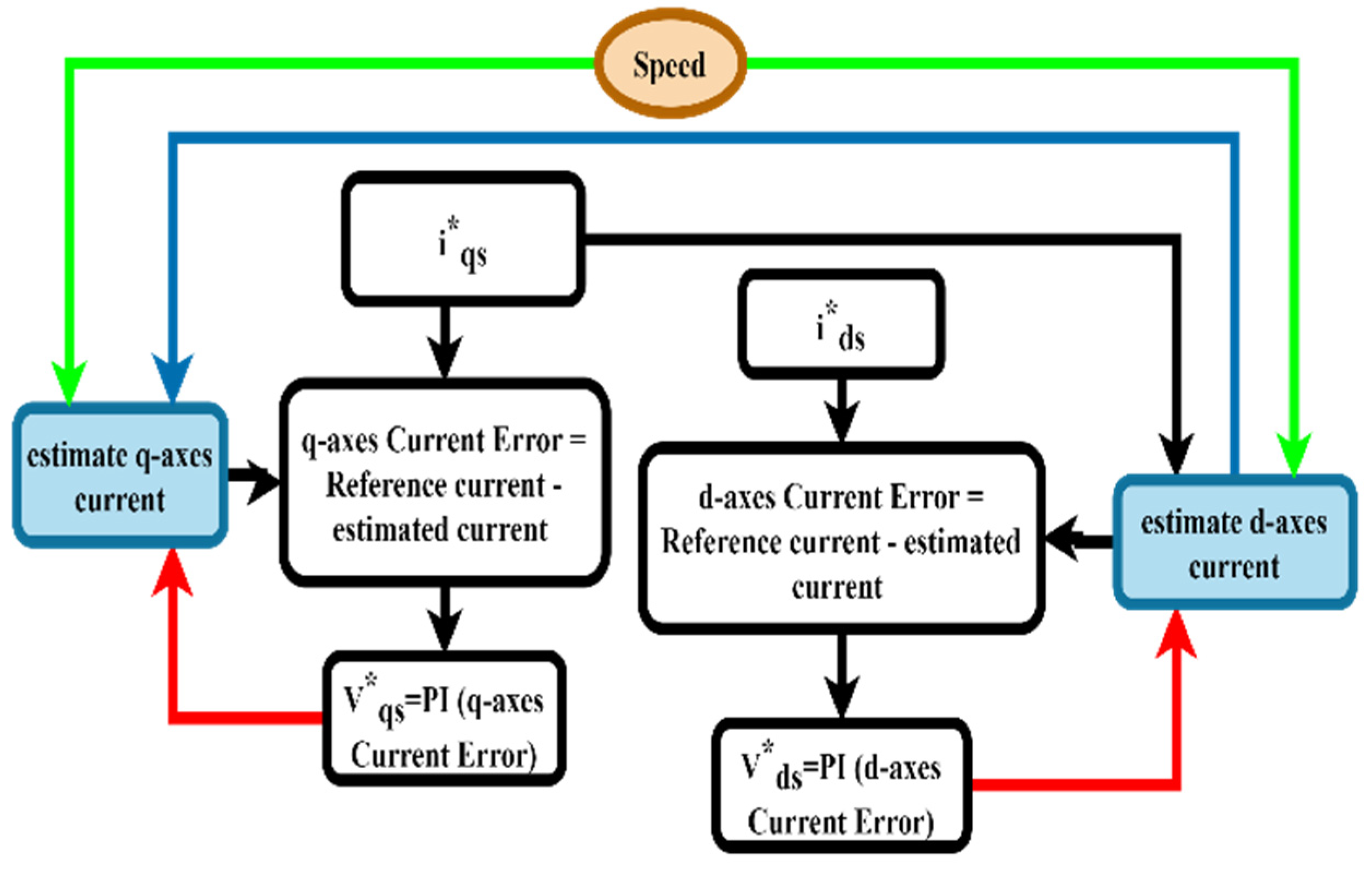
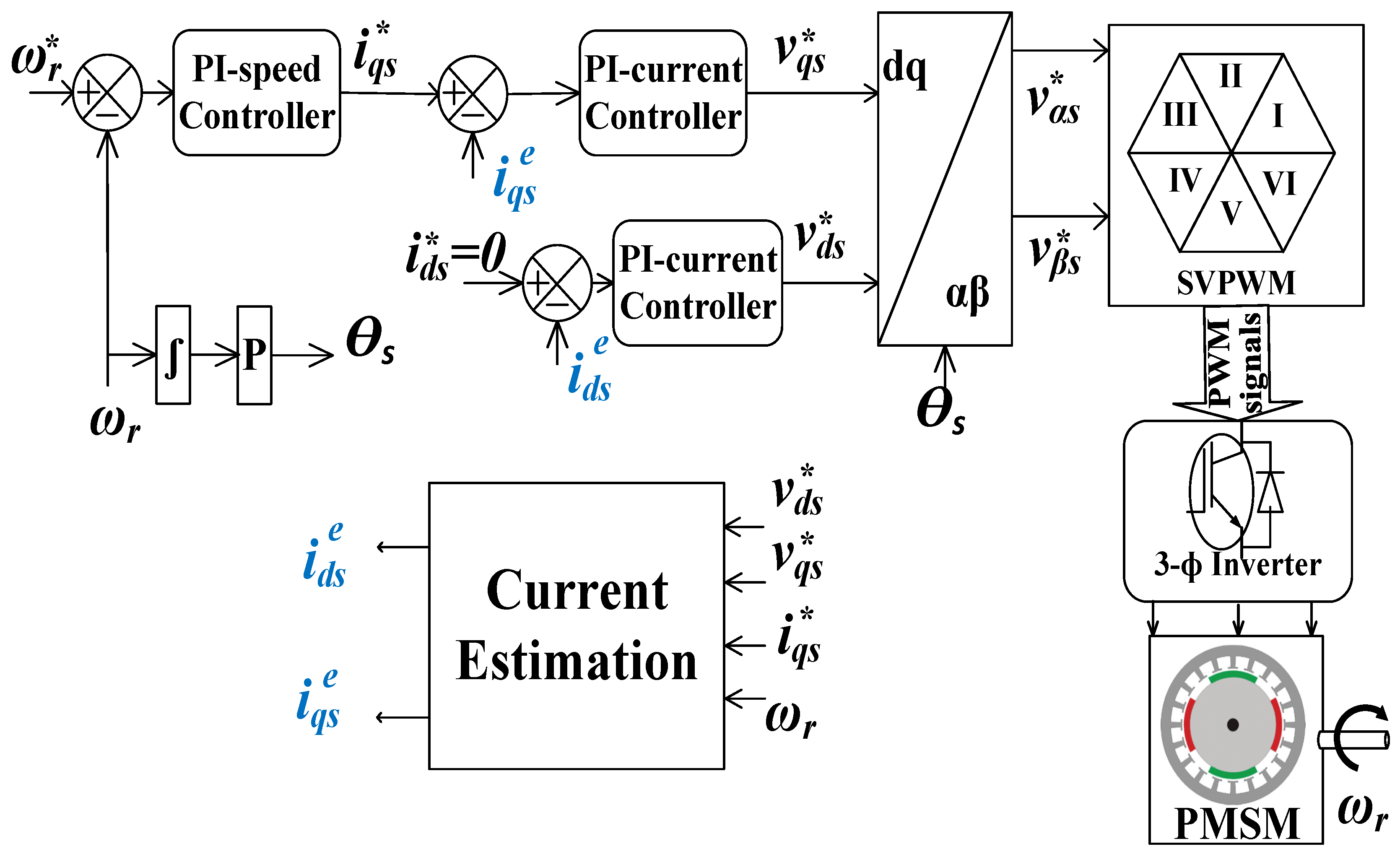
3. Current Sensorless Methodology
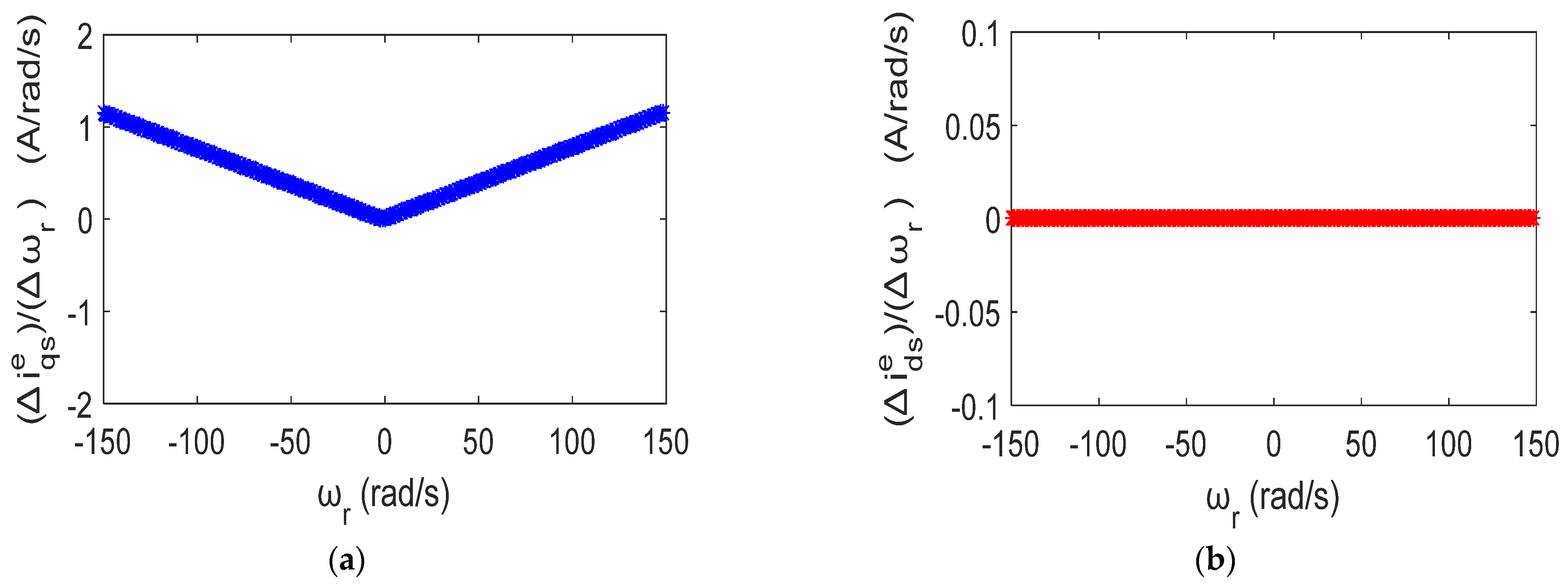
4. Sensitivity Analysis
5. Simulation Results
5.1. Various Speed Operations
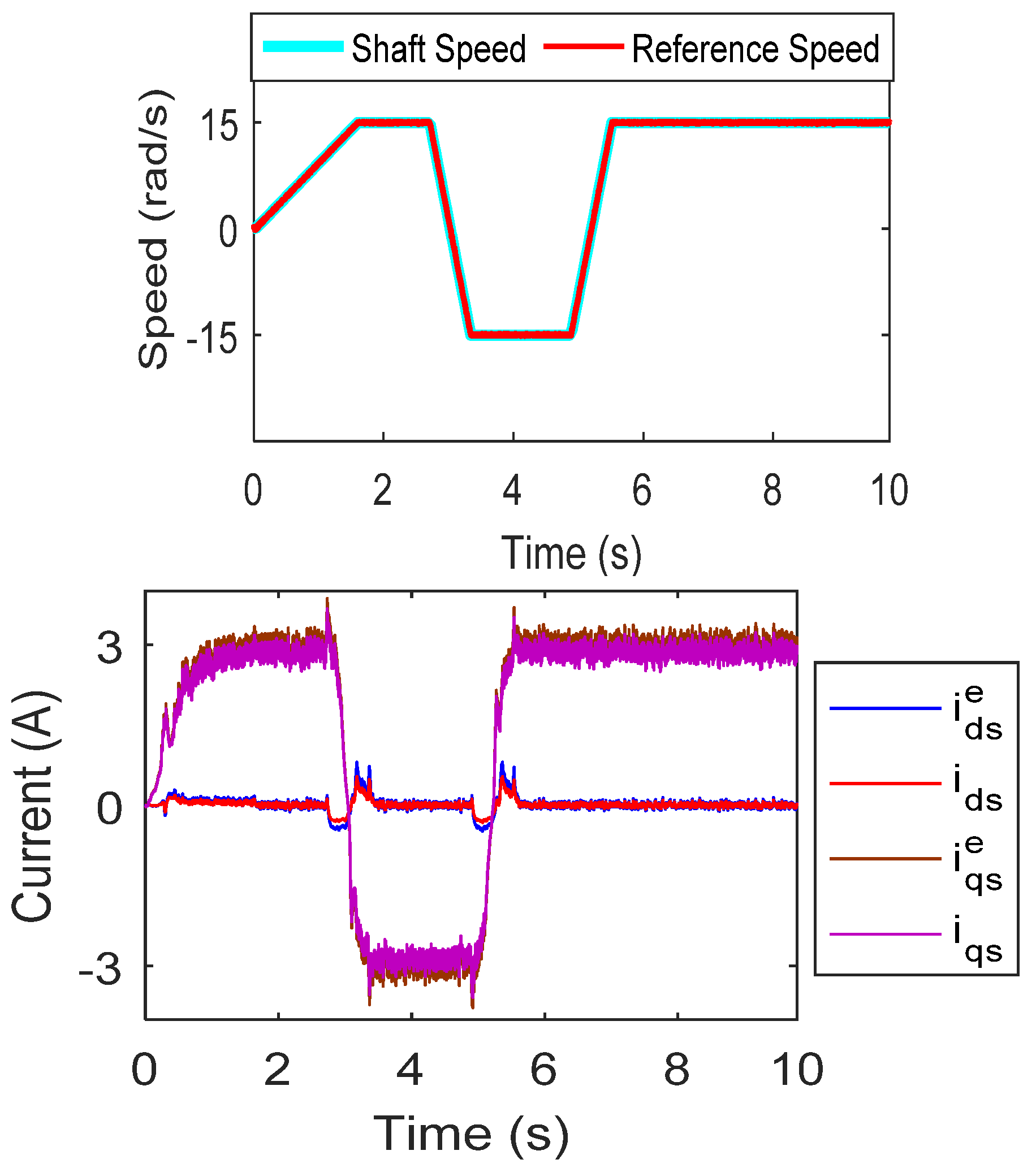
5.2. Drive Performance for the Ramp Speed Command
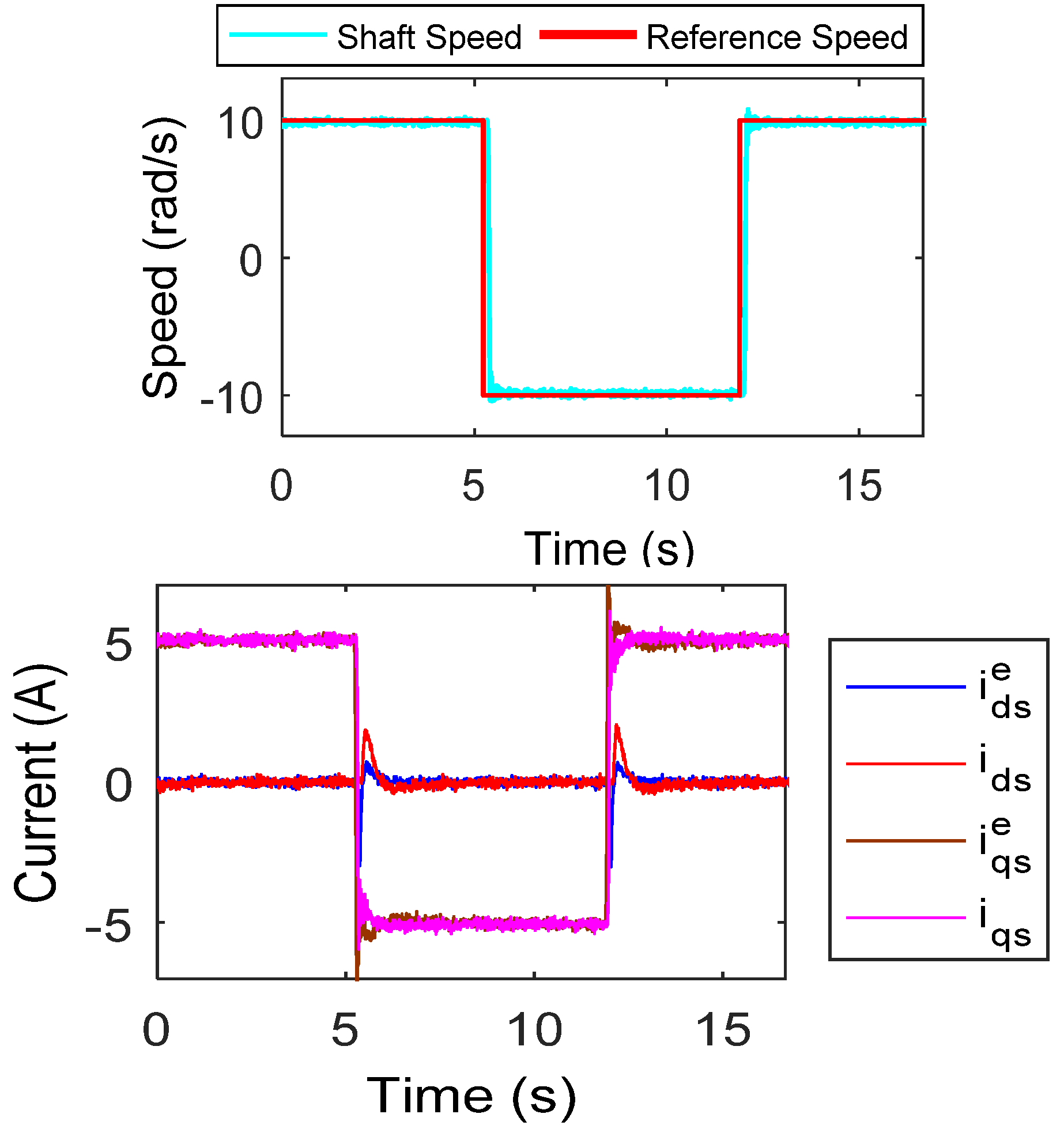
5.3. Drive performance for Step Speed Command
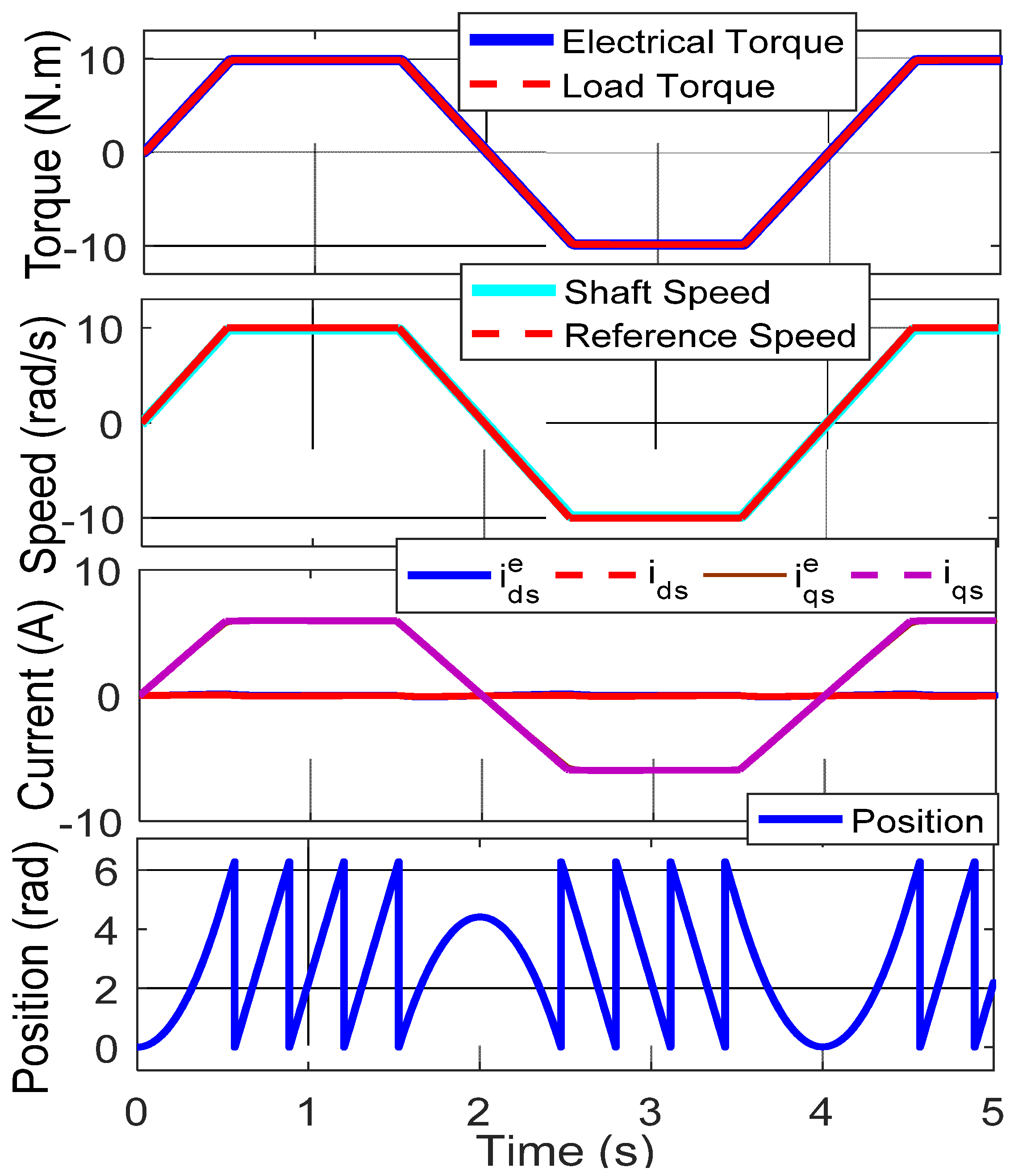
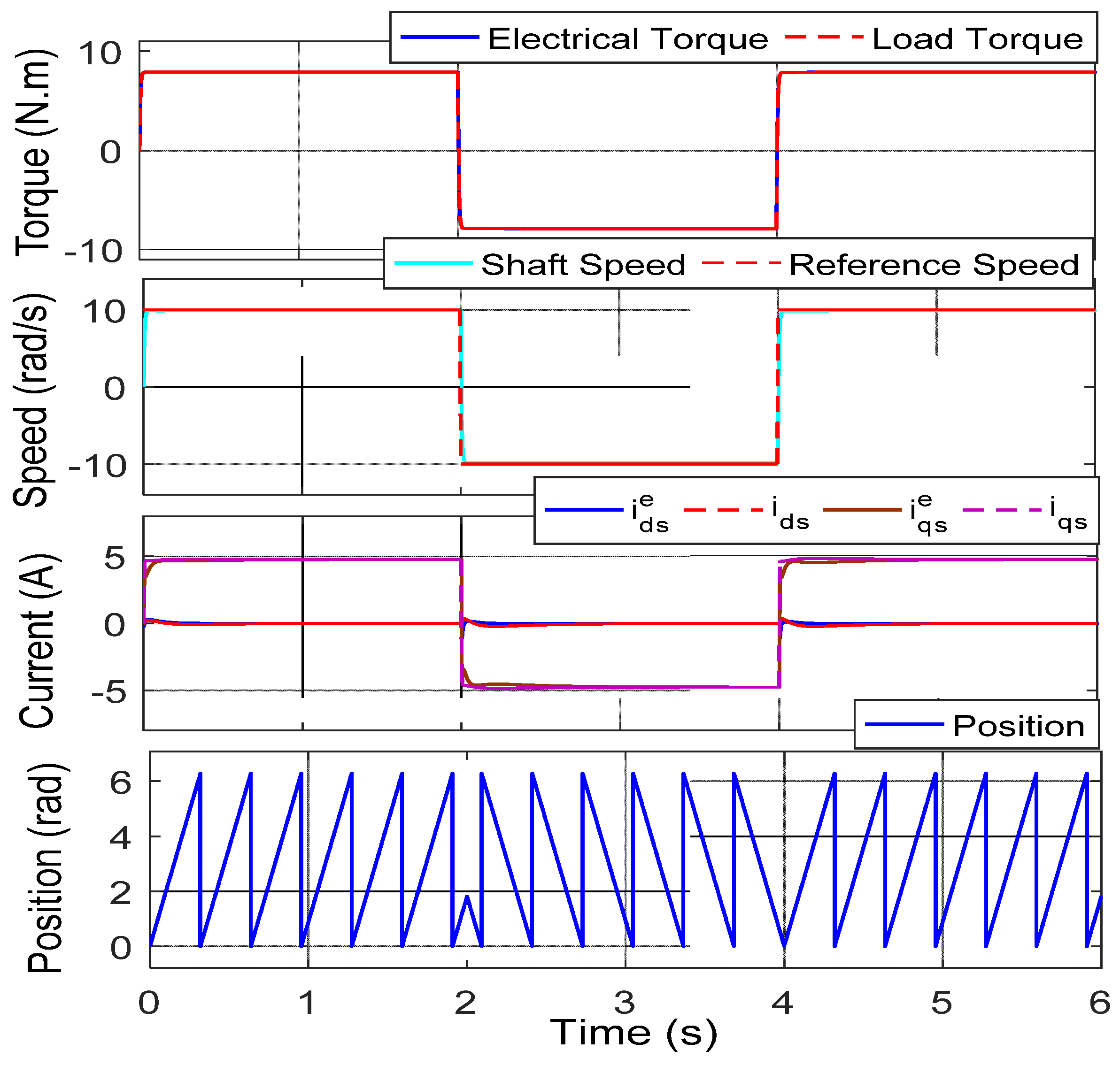
5.4. Drive Performance for the Four-Quadrant Operation
5.5. Effect of the Stator Resistance ()
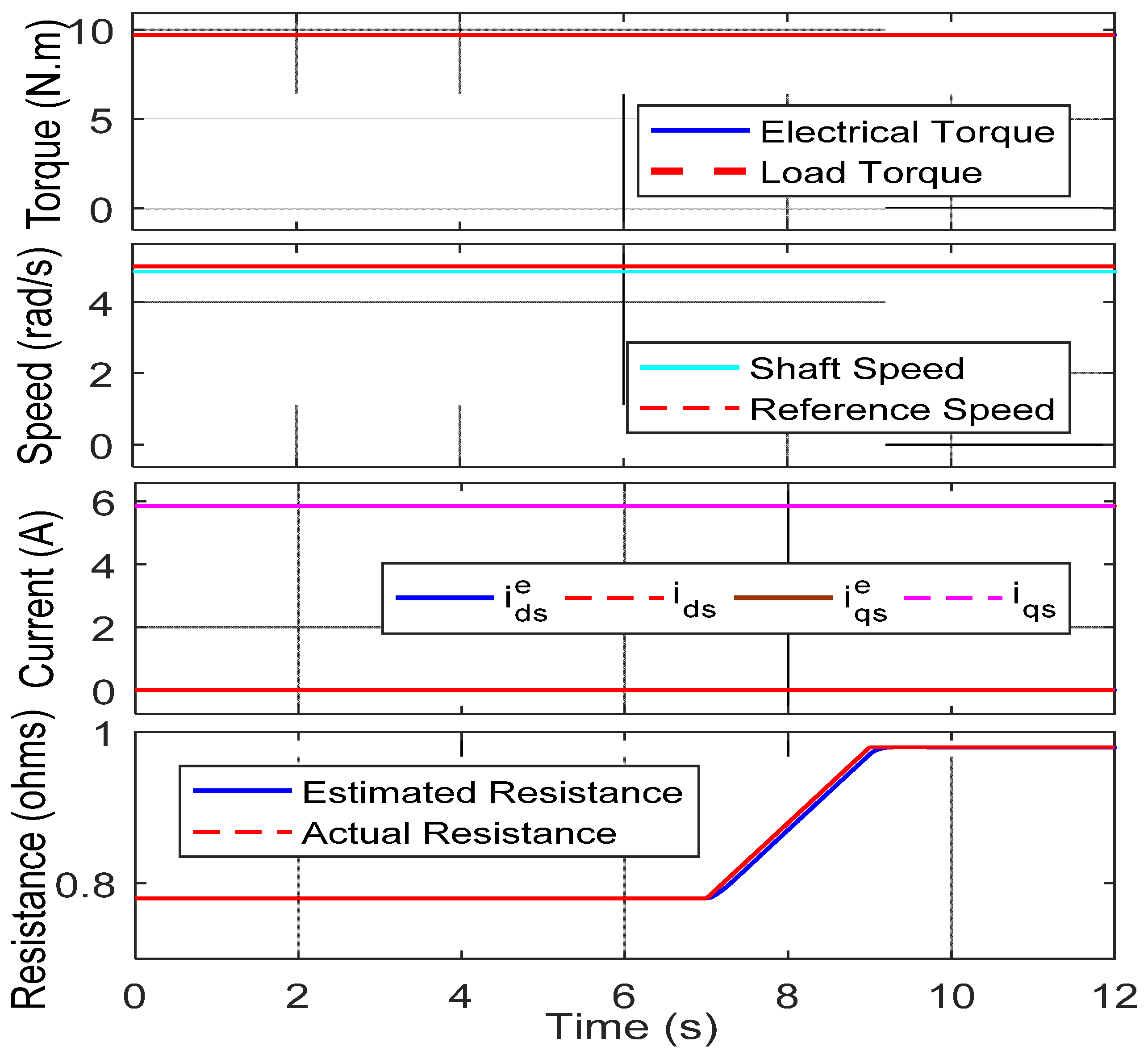
5.6. Stator Resistance Compensation
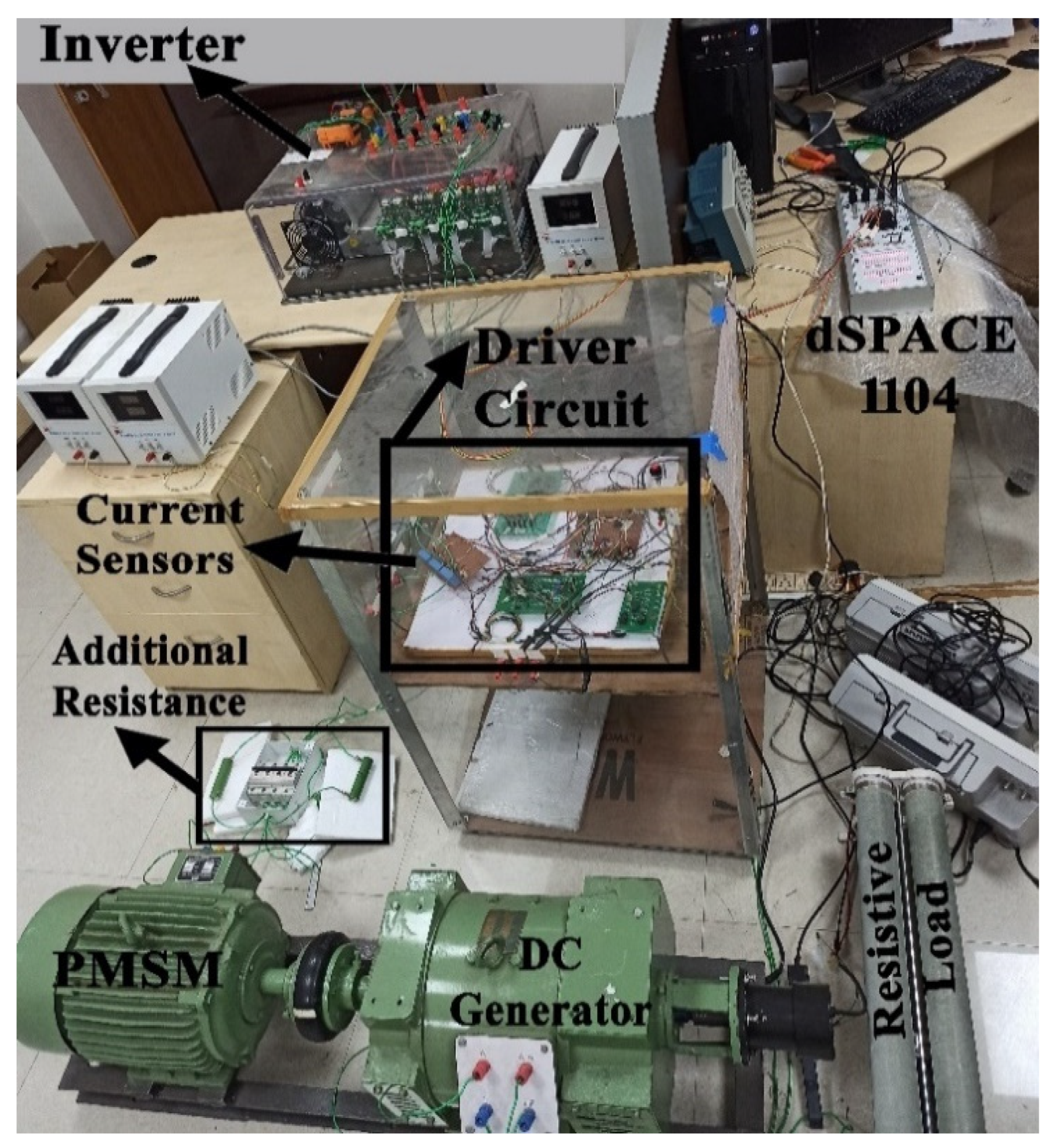
6. Hardware Validation
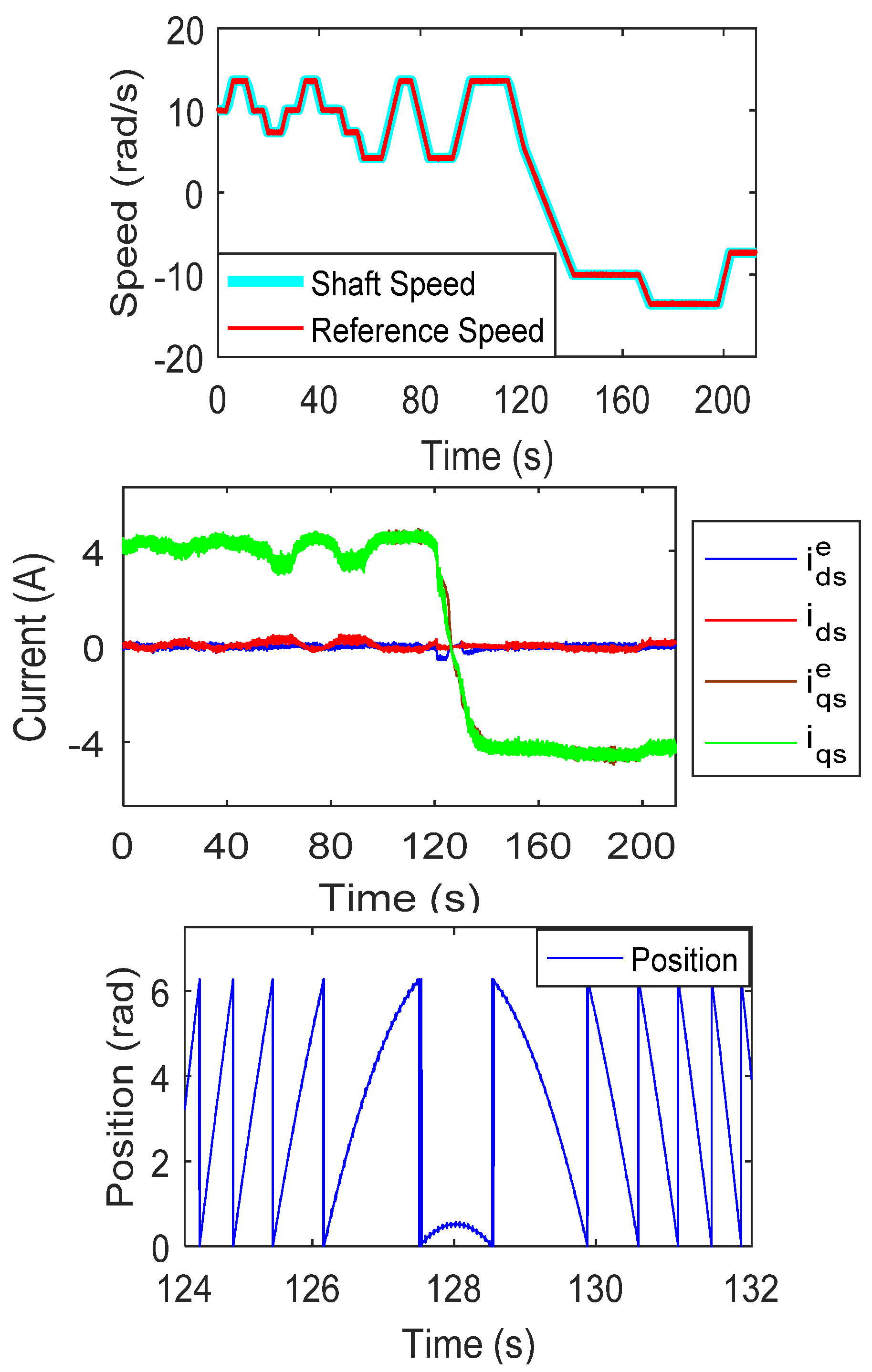
6.1. Variable Speed Operations
6.2. Forward and Reverse Motoring Operations in a Ramp Speed Command
6.3. Drive Operation for the Step Speed Command
6.4. Drive Operation with Online Rotor Resistance Estimation and Compensation
6.5. Drive Operation for the High-Speed Command
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives; CRC Press/Taylor & Francis: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bose, B.K. Modern Power Electronics and AC Drives; Prentice Hall PTR: Hoboken, NJ, USA, 2002. [Google Scholar]
- Chung, D.W.; Sul, S.K. Analysis and compensation of current measurement error in vector-controlled AC motor drives. IEEE Trans. Ind. Appl. 1998, 34, 340–345. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, H.; Zou, J.; Wang, B.; Li, Y. Zero voltage vector sampling method for PMSM three-phase current reconstruction using single current sensor. IEEE Trans. Power Electron. 2017, 32, 3797–3807. [Google Scholar] [CrossRef]
- Wang, W.; Yan, H.; Xu, Y.; Zou, J.; Zhang, X.; Zhao, W. New three-phase current reconstruction for PMSM drive with hybrid space vector pulse width modulation technique. IEEE Trans. Power Electron. 2021, 36, 662–673. [Google Scholar] [CrossRef]
- Cho, Y.; Labella, T.; Lai, J.S. A three-phase current reconstruction strategy with online current offset compensation using a single current sensor. IEEE Trans. Ind. Electron. 2012, 59, 2924–2933. [Google Scholar] [CrossRef]
- Kim, H.; Jahns, T.M. Current control for AC motor drives using a single DC-link current sensor and measurement voltage vectors. IEEE Trans. Ind. Appl. 2006, 42, 1539–1547. [Google Scholar] [CrossRef]
- Hafez, B.; Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S.; Lorenz, R.D. Single-sensor-based three-phase permanent-magnet synchronous motor drive system with luenberger observers for motor line current reconstruction. IEEE Trans. Ind. Appl. 2014, 50, 2602–2613. [Google Scholar] [CrossRef]
- Yan, H.; Wang, W.; Xu, Y.; Jibin, Z. Position sensorless control for PMSM drives with single current sensor. IEEE Trans. Ind. Electron. 2022, 70, 1. [Google Scholar] [CrossRef]
- Ha, J.I. Current prediction in vector-controlled PWM inverters using single DC-link current sensor. IEEE Trans. Ind. Electron. 2010, 57, 716–726. [Google Scholar]
- Saritha, B.; Janakiraman, P.A. Sinusoidal three-phase current reconstruction and control using a DC-link current sensor and a curve-fittins observer. IEEE Trans. Ind. Electron. 2007, 54, 2657–2664. [Google Scholar] [CrossRef]
- Tang, Q.; Shen, A.; Li, W.; Luo, P.; Chen, M.; He, X. Multiple-positions-coupled sampling method for PMSM three-phase current reconstruction with a single current sensor. IEEE Trans. Power Electron. 2020, 35, 699–708. [Google Scholar] [CrossRef]
- Sun, K.; Wei, Q.; Huang, L.; Matsuse, K. An overmodulation method for PWM-inverter-Fed IPMSM drive with single current sensor. IEEE Trans. Ind. Electron. 2010, 57, 3395–3404. [Google Scholar] [CrossRef]
- Zhao, J.; Nalakath, S.; Emadi, A. A high frequency injection technique with modified current reconstruction for low-speed sensorless control of ipmsms with a single dc-link current sensor. IEEE Access 2019, 7, 136137–136147. [Google Scholar] [CrossRef]
- Lai, Y.S.; Lin, Y.K.; Chen, C.W. New hybrid pulsewidth modulation technique to reduce current distortion and extend current reconstruction range for a three-phase inverter using only DC-link sensor. IEEE Trans. Power Electron. 2013, 28, 1331–1337. [Google Scholar] [CrossRef]
- Gu, Y.; Ni, F.; Yang, D.; Liu, H. Switching-State phase shift method for three-phase-current reconstruction with a single DC-Link current sensor. IEEE Trans. Ind. Electron. 2011, 58, 5186–5194. [Google Scholar]
- Lee, W.C.; Hyun, D.S.; Lee, T.K. A novel control method for three-phase PWM rectifiers using a single current sensor. IEEE Trans. Power Electron. 2000, 15, 861–870. [Google Scholar]
- Zhu, L.; Chen, F.; Li, B.; Li, C.; Wang, G.; Wang, S.; Zhang, G.; Xu, D. Phase Current reconstruction error suppression method for single DC-Link shunt PMSM drives at low-speed region. IEEE Trans. Power Electron. 2021, 37, 7067–7081. [Google Scholar] [CrossRef]
- Green, T.C.; Williams, B.W. Derivation of motor line-current waveforms from the DC-Link current of an inverter. IEE Proc. B Electr. Power Appl. 1989, 136, 196–204. [Google Scholar] [CrossRef]
- Boys, J.T. Novel current sensor for PWM AC drives. IEE Proc. B Electr. Power Appl. 1988, 135, 27–32. [Google Scholar] [CrossRef]
- Singh, B.; Goyal, D. Improved DSVM-DTC Based Current Sensorless Permanent Magnet Synchronous Motor Drive. In Proceedings of the 2007 7th International Conference on Power Electronics and Drive Systems, Bangkok, Thailan, 27–30 November 2007; pp. 1354–1360. [Google Scholar]
- Kim, S. Proportional-type performance recovery current tracking control algorithm for PMSM. IET Electr. Power Appl. 2018, 12, 332–338. [Google Scholar] [CrossRef]
- Ha, J.I. Voltage injection method for three-phase current reconstruction in PWM inverters using a single sensor. IEEE Trans. Power Electron. 2009, 24, 767–775. [Google Scholar]
- Montanari, M.; Peresada, S.; Rossi, C.; Tilli, A. Current sensorless position–flux tracking controller for induction motor drives. Mechatronics 2007, 17, 15–30. [Google Scholar] [CrossRef]
- Morimoto, S.; Sanada, M.; Takeda, Y. High-performance current-sensorless drive for PMSM and SynRM with only low-resolution position sensor. IEEE Trans. Ind. Appl. 2003, 39, 792–801. [Google Scholar] [CrossRef]
- Matsuo, T.; Lipo, T.A. Current Sensorless Field Oriented Control of Synchronous Reluctance Motor. In Proceedings of the Conference Record-IAS Annual Meeting, IEEE Industry Applications Society, Toronto, ON, Canada, 2–8 October 1993; IEEE: Piscataway, NJ, USA, 1993; pp. 672–678. [Google Scholar]
- Consoli, A.; Scarcella, G.; Testa, A. Speed and Current Sensorless Field Oriented Induction Motor Drive Operating at Low Stator Frequencies. In Proceedings of the Conference Record-IAS Annual Meeting, IEEE Industry Applications Society, Pittsburgh, PA, USA, 13–18 October 2002; pp. 1679–1686. [Google Scholar]
- Chang, S.C.; Yeh, S.N. Current sensorless field-oriented control of induction motors. IEE Proc. Electr. Power Appl. 1996, 143, 492–500. [Google Scholar] [CrossRef]
- Ohishi, K.; Yoshida, K. Current Sensor-Less Speed Servo System of PM Motor Based on Self-Tuning Current Simulator. In Proceedings of the IEMDC 2003-IEEE International Electric Machines and Drives Conference, Madison, WI, USA, 1–4 June 2003; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2003; pp. 1895–1900. [Google Scholar]
- Morimoto, S.; Sanada, M.; Takeda, Y. Optimum efficiency operation of synchronous reluctance motor without current sensor. IEE Conf. Publ. 2000, 506–511. [Google Scholar]
- Morimoto, S.; Kinoshita, K.; Takeda, Y. A current sensorless drive system of a synchronous motor with a low-resolution position sensor. Electr. Eng. Jpn. (Engl. Transl. Denki Gakkai Ronbunshi) 2002, 141, 34–43. [Google Scholar] [CrossRef]
- Teng, Q.; Cui, H.; Duan, J.; Zhu, J.; Guo, Y.; Lei, G. Extended state observer-based vector control for PMSM drive system with single phase current sensor. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems, ICEMS, Sydney, NSW, Australia, 11–17 August 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017. [Google Scholar]
- Bolognani, S.; Oboe, R.; Zigliotto, M. Sensorless full-digital pmsm drive with ekf estimation of speed and rotor position. IEEE Trans. Ind. Electron. 1999, 46, 184–191. [Google Scholar] [CrossRef]
- Badini, S.S.; Verma, V. A new stator resistance estimation technique for vector-controlled PMSM drive. IEEE Trans. Ind. Appl. 2020, 56, 6536–6545. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| “Nominal shaft power” () | 3 KW |
| “Pole pair” () | 2 |
| “Nominal speed” () | 157 rad/s. |
| “ inductance” () | 0.0107637 H |
| “ inductance” () | 0.0553733 H |
| (“Mutual flux linkage between rotor and stator due to the permanent magnet”) | 0.553161 Wb/m2 |
| “Stator resistance” () | 0.78 Ω |
| Rated current | 5.9 A |
| Rated voltage | 415 V |
| Rated torque | 16 N·m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Badini, S.S.; Verma, V.; Tariq, M.; Urooj, S.; Mihet-Popa, L. Performance of a Vector-Controlled PMSM Drive without Using Current Sensors. Mathematics 2022, 10, 4623. https://doi.org/10.3390/math10234623
Badini SS, Verma V, Tariq M, Urooj S, Mihet-Popa L. Performance of a Vector-Controlled PMSM Drive without Using Current Sensors. Mathematics. 2022; 10(23):4623. https://doi.org/10.3390/math10234623
Chicago/Turabian StyleBadini, Sai Shiva, Vimlesh Verma, Mohd Tariq, Shabana Urooj, and Lucian Mihet-Popa. 2022. "Performance of a Vector-Controlled PMSM Drive without Using Current Sensors" Mathematics 10, no. 23: 4623. https://doi.org/10.3390/math10234623
APA StyleBadini, S. S., Verma, V., Tariq, M., Urooj, S., & Mihet-Popa, L. (2022). Performance of a Vector-Controlled PMSM Drive without Using Current Sensors. Mathematics, 10(23), 4623. https://doi.org/10.3390/math10234623