
Theoretical Study of the Static and Dynamic Characteristics of a Slotted Adaptive Hydrostatic Thrust Bearing with a Regulator of the Lubricant Output Flow

Abstract
:1. Introduction
2. Mathematical Modeling
3. Static Characteristics of the Thrust Bearing
3.1. Calculation of the Parameters of the “Design Point” Mode
3.2. Static Characteristics and Their Discussion
4. Dynamic Characteristics of the Thrust Bearing
4.1. Linear Model of Thrust Bearing Dynamics
4.2. Some Considerations Regarding the Methodology for Applying the Linear Dynamics Model to the Study of Sliding Bearings with Liquid and Gas Lubrication
4.3. Dynamic Characteristics of the Thrust Bearing and Their Discussion
- -
- Unit mass of the shaft M = 1, taking into account the influence of the force of its inertia;
- -
- “Compression number” σ, which is a measure of the viscous damping of the lubricant film under pressure;
- -
- Damping coefficient De of the elastic ring material.
5. Checking the Correctness of the Obtained Data
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| H, h | dimensionless thickness, thickness of the gap |
| Ht | dimensionless thickness of the blind gap |
| Hs | dimensionless value of the total gap |
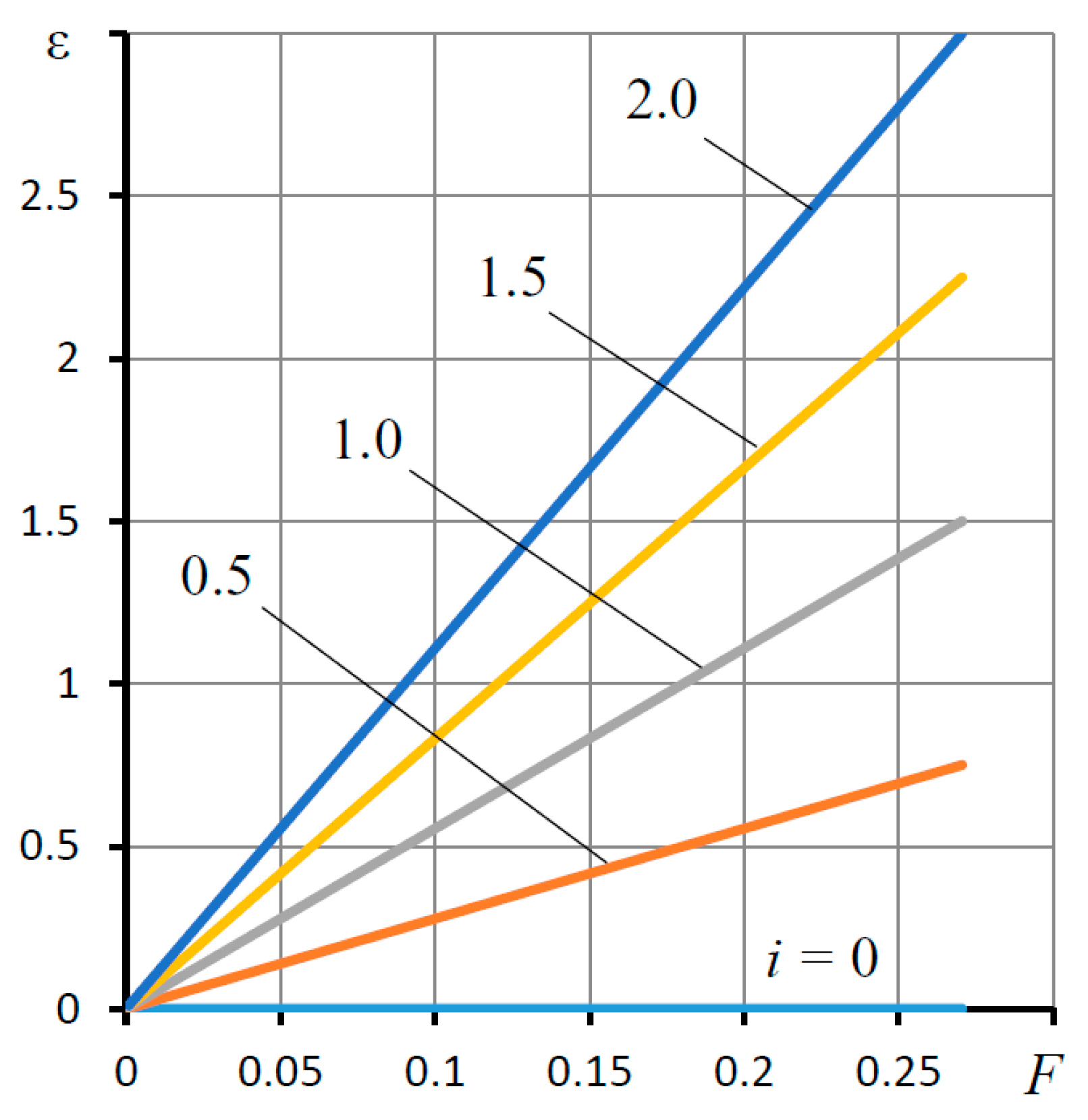
| ε | dimensionless deformation of elastic ring 3 |
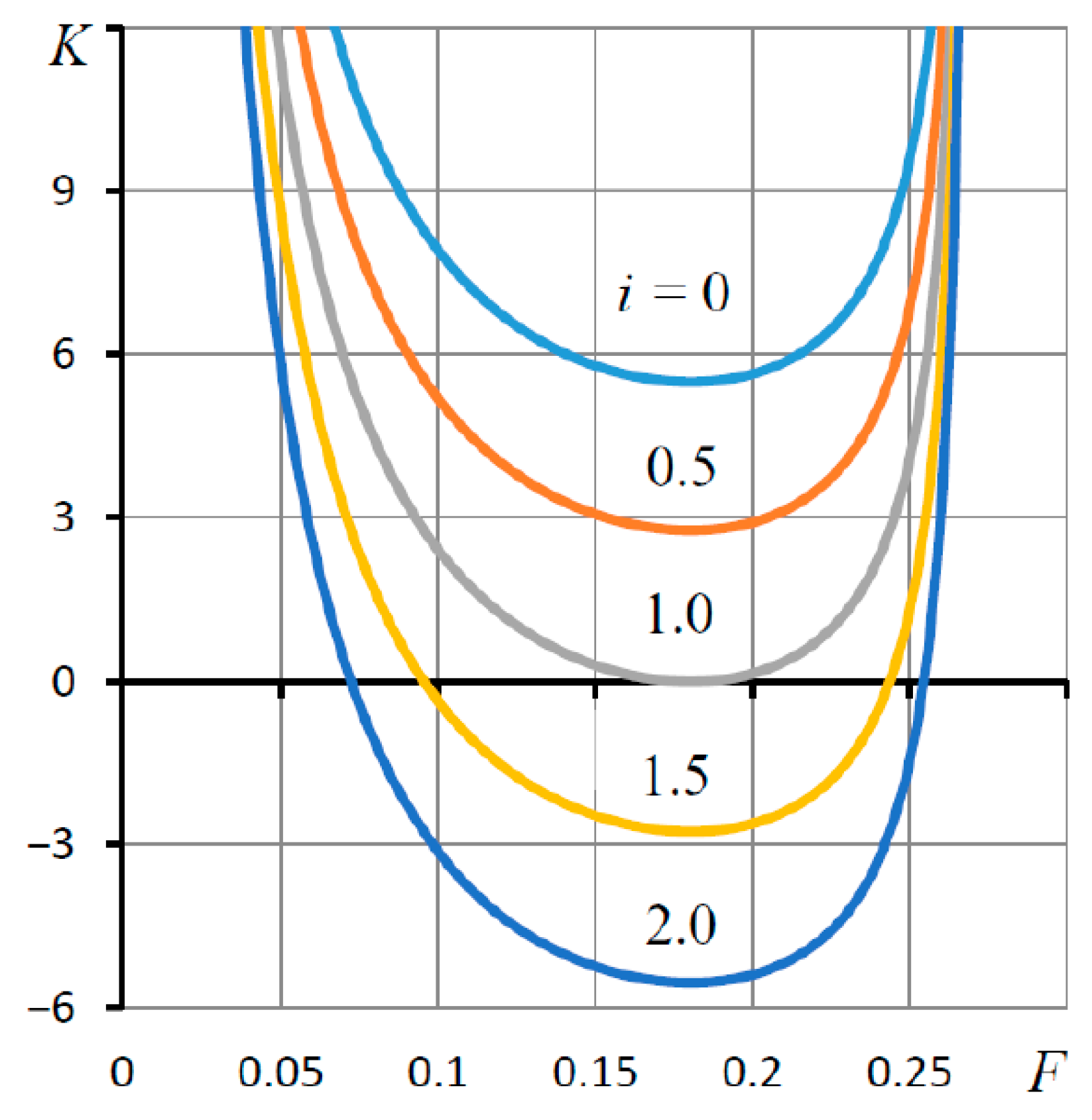
| K, Ke | dimensionless compliance of the bearing and elastic ring 3 |
| P (R,τ) | dimensionless dynamic pressure in the bearing gap |
| pt | lubricant pressure at the outlet of the gap |
| ps | supply pressure |
| Qh | dimensionless flow rate through the gap |
| Qt | dimensionless flow rate at the inlet to the gap Ht |
| Qs | dimensionless flow rate at the outlet of the gap Hs |
| Qc | dimensionless flow rate through the slotted throttle |
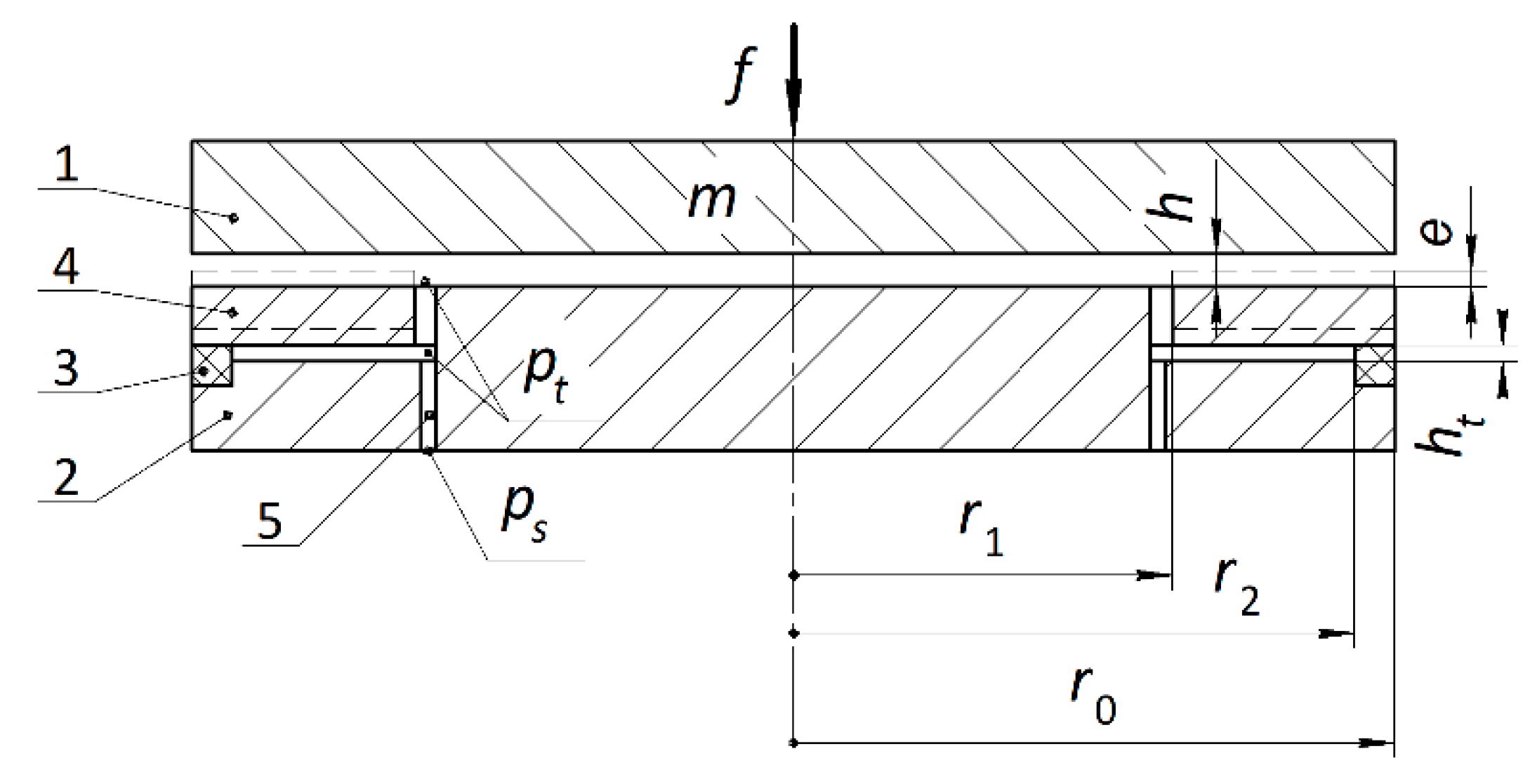
| r0,r1,r2 | bearing radii (Figure 1) |
| R | dimensionless radius |
| t0 | scale of current time |
| W | dimensionless load capacity |
| η | degree of stability |
| μ | coefficient of dynamic viscosity of the lubricant |
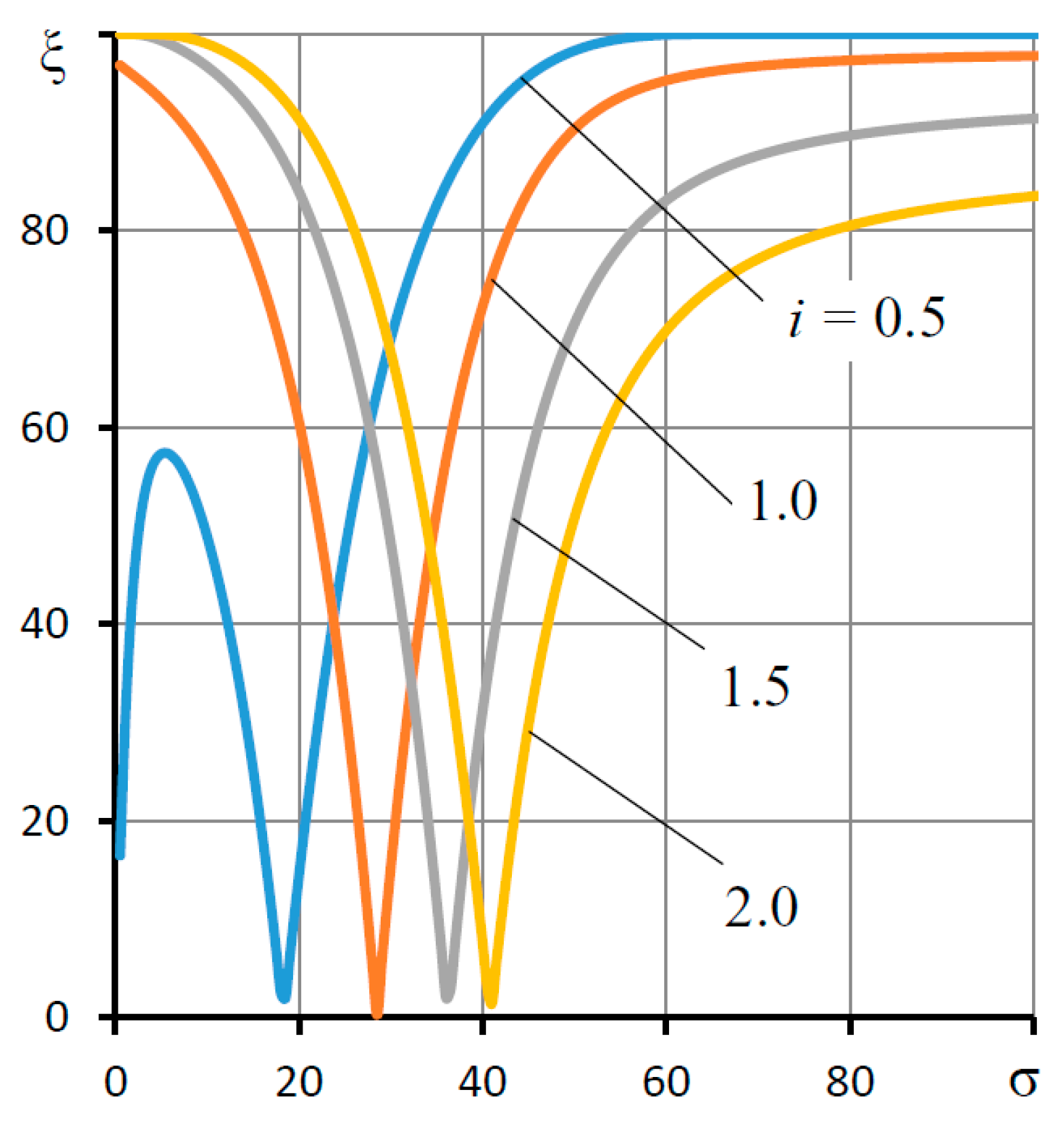
| ξ | damping of oscillations over the period |
| χ | normalized adjustment coefficient of the external throttling system |
| σ | “compression number” |
| τ | dimensionless time |
References
- Bouyer, J.; Wodtke, M.; Fillon, M. Experimental research on a hydrodynamic thrust bearing with hydrostatic lift pockets: Influence of lubrication modes on bearing performance. Tribol. Int. 2022, 165, 107253. [Google Scholar] [CrossRef]
- Michalec, M.; Svoboda, P.; Křupka, I.; Hartl, M. A review of the design and optimization of large-scale hydrostatic bearing systems. Eng. Sci. Technol. Int. J. 2021, 24, 936–958. [Google Scholar] [CrossRef]
- Yanqin, Z.; Yi, L.; Shiqian, N.; Zhiquan, Z. Heavy load characteristics of micro-beveled heavy-duty hydrostatic bearing lubricant oil film. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 235, 738–747. [Google Scholar] [CrossRef]
- Kodnyanko, V.; Kurzakov, A.; Grigorieva, O.; Brungardt, M.; Belyakova, S.; Gogol, L.; Surovtsev, A.; Strok, L. Theoretical disquisition on the static and dynamic characteristics of an adaptive stepped hydrostatic thrust bearing with a displacement compensator. Mathematics 2021, 9, 2949. [Google Scholar] [CrossRef]
- Push, A. Spindle Units: Quality and Reliability; Mashinostroenie: Moscow, Russia, 1992; 288p.
- Brzeski, L.; Kazimierski, Z. High stiffness bearing. J. Lubr. Technol. 1979, 101, 520–525. [Google Scholar] [CrossRef]
- LaTray, N.; Kim, D.; Song, M. Static performance of a hydrostatic thrust foil bearing for large scale oil-free turbomachines. J. Eng. Gas Turbines Power 2021, 143, 041017. [Google Scholar] [CrossRef]
- Brungardt, M.; Shatokhin, S. Spindles with multiply adaptive hydrostatic bearings. Russ. Eng. Res. 2021, 41, 10–15. [Google Scholar] [CrossRef]
- Kurzakov, A. Adaptive gas-static spindle bearings. Russ. Eng. Res. 2013, 33, 389–391. [Google Scholar] [CrossRef]
- Sawicki, J.; Capaldi, R.; Adams, M. Experimental and theoretical rotordynamic characteristics of a hybrid journal bearing. J. Tribol. 1997, 119, 132–141. [Google Scholar] [CrossRef]
- Pourmehran, O.; Rahimi-Gorji, M.; Gorji-Bandpy, M.; Baou, M. Comparison between the volumetric flow rate and pressure distribution for different kinds of sliding thrust bearing. Propuls. Power Res. 2015, 4, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Shatokhin, S.; Shatokhin, S. Closed hydrostatic guides of metal-cutting machines. Russ. Eng. Res. 2014, 34, 326–329. [Google Scholar] [CrossRef]
- Hesselbach, J.; Abel-Keilhack, C. Active hydrostatic bearing with magnetorheological fluid. J. Appl. Phys. 2003, 93, 8441–8443. [Google Scholar] [CrossRef]
- Ow, D.S.; Lee, R.M.; Nissom, P.M.; Philp, R.; Oh, S.K.; Yap, M.G. Inactivating frur global regulator in plasmid-bearing escherichia coli alters metabolic gene expression and improves growth rate. J. Biotechnol. 2007, 131, 261–269. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Dixon, W.E.; Ziegert, J.C. Adaptive nonlinear contour coupling control for a machine tool system. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005. [Google Scholar] [CrossRef]
- Kodnyanko, V. Characteristics of a gas-static thrust bearing with an active displacement regulator. Russ. J. STIN 2005, 9, 32–34. [Google Scholar]
- Kodnyanko, V.; Shatokhin, S. Theoretical study on dynamics quality of aerostatic thrust bearing with external combined throttling. FME Trans. 2020, 48, 342–350. [Google Scholar] [CrossRef]
- Kodnyanko, V.; Shatokhin, S.; Kurzakov, A.; Pikalov, Y.; Strok, L.; Pikalov, I.; Grigorieva, O.; Brungardt, M. Theoretical efficiency study of output lubricant flow rate regulating principle on the example of a two-row aerostatic journal bearing with longitudinal microgrooves and a system of external combined throttling. Mathematics 2021, 9, 1689. [Google Scholar] [CrossRef]
- Kodnyanko, V.; Kurzakov, A. Compliance of gas-dynamic bearing with elastic compensator of movement. J. Sib. Fed. Univ. Eng. Technol. 2017, 10, 657–663. [Google Scholar] [CrossRef]
- Shatokhin, S.; Kodnyanko, V. Radial gasostatic bearing-seal with opposite internal gas flow compensation. Sov. J. Frict. Wear 1984, 5, 32–35. [Google Scholar]
- Kodnyanko, V. Method for calculating the static characteristics of radial hydrostatic compensator of machine tool bearings deformation. Period. Polytech. Transp. Eng. 2021, 49, 114–119. [Google Scholar] [CrossRef] [Green Version]
- Kazama, T.; Yamaguchi, A. Hydrostatic thrust bearing-theory and experiments. Tribology 1968, 1, 62. [Google Scholar] [CrossRef]
- Demidovich, B.; Maron, I.; Shuvalova, E. Numerical methods of analysis. In Approximation of Functions, Differential and Integral Equations, 5th ed.; Lan: Moscow, Russia, 2010; 400p. [Google Scholar]
- Wulandari, S.; Iswanto, B.; Sugihartono, I. Determination of springs constant by hooke’s law and simple harmonic motion experiment. J. Phys. Conf. Ser. 2021, 2019, 012053. [Google Scholar] [CrossRef]
- Besekersky, V.; Popov, E. Theory of Automatic Control Systems; Profession: Saint Petersburg, Russia, 2003; 752p. [Google Scholar]
- Ricardo, H. A modern Introduction to Linear Algebra; CRC Press: New York, NY, USA, 2009; 670p. [Google Scholar]
- Narendra, K.; Shorten, R. Hurwitz stability of metzler matrices. IEEE Trans. Autom. Control 2010, 55, 1484–1487. [Google Scholar] [CrossRef]
- Baldiotti, M.; Fresneda, R.; Gitman, D. Quantization of the damped harmonic oscillator revisited. Phys. Lett. A 2011, 375, 1630–1636. [Google Scholar] [CrossRef] [Green Version]
- Shatokhin, S.; Pikalov, I. Hydrostatic bearing. Invent. Eng. 2007, 1, 4. [Google Scholar]
- Markhel, I. Machine Parts; Mashinostroenie: Moscow, Russia, 1986; 448p.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Parameter | Supply Pressure (MPa) | Computational Data | Data [29] | Error (%) |
|---|---|---|---|---|
| Load capacity (N) | 0.4 | 317 | 322 | 1.7 |
| 0.8 | 634 | 644 | 1.7 | |
| 1.2 | 950 | 966 | 1.7 | |
| 1.6 | 1267 | 1288 | 1.7 | |
| 2.0 | 1584 | 1610 | 1.7 |
| Performance Parameter | Bearing Gap (µm) | Computational Data | Data [30] | Error (%) |
|---|---|---|---|---|
| Load capacity (N) | 10 | 386 | 320 | 17 |
| 15 | 365 | 307 | 16 | |
| 20 | 343 | 295 | 14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kodnyanko, V.; Kurzakov, A.; Surovtsev, A.; Strok, L.; Grigorieva, O.; Brungardt, M.; Belyakova, S.; Gogol, L. Theoretical Study of the Static and Dynamic Characteristics of a Slotted Adaptive Hydrostatic Thrust Bearing with a Regulator of the Lubricant Output Flow. Mathematics 2022, 10, 355. https://doi.org/10.3390/math10030355
Kodnyanko V, Kurzakov A, Surovtsev A, Strok L, Grigorieva O, Brungardt M, Belyakova S, Gogol L. Theoretical Study of the Static and Dynamic Characteristics of a Slotted Adaptive Hydrostatic Thrust Bearing with a Regulator of the Lubricant Output Flow. Mathematics. 2022; 10(3):355. https://doi.org/10.3390/math10030355
Chicago/Turabian StyleKodnyanko, Vladimir, Andrey Kurzakov, Alexey Surovtsev, Lilia Strok, Olga Grigorieva, Maxim Brungardt, Svetlana Belyakova, and Ludmila Gogol. 2022. "Theoretical Study of the Static and Dynamic Characteristics of a Slotted Adaptive Hydrostatic Thrust Bearing with a Regulator of the Lubricant Output Flow" Mathematics 10, no. 3: 355. https://doi.org/10.3390/math10030355
APA StyleKodnyanko, V., Kurzakov, A., Surovtsev, A., Strok, L., Grigorieva, O., Brungardt, M., Belyakova, S., & Gogol, L. (2022). Theoretical Study of the Static and Dynamic Characteristics of a Slotted Adaptive Hydrostatic Thrust Bearing with a Regulator of the Lubricant Output Flow. Mathematics, 10(3), 355. https://doi.org/10.3390/math10030355