Abstract
Exploiting the stochastic Hamiltonian structure, this paper investigates the robust fault-tolerant control (FTC) for stochastic port-Hamiltonian systems (SPHSs) with actuator faults. First, an energy-based robust FT controller is developed for SPHSs against the loss of actuator effectiveness. Then, an alternative condition, as well as its corresponding controller are given to extend the application of the proposed controller. Unlike the existing FT controllers, they are continuous, and there is no need to solve the Lyapunov function and Hamilton–Jacobi–Isaacs (HJI) inequalities associated with the nominal systems. Finally, an energy-based robust adaptive FT controller is presented for the faulty SPHSs to deal with parameter perturbations, and an alternative condition with its corresponding controller is also given. Both the adaptive controllers preserve the main stochastic Hamiltonian structure of the faulty systems. Compared to the existing adaptive controller, simulations on synchronous generators show the effectiveness of the proposed methods.
Keywords:
fault-tolerant control; stochastic port-Hamiltonian systems; actuator faults; faulty systems MSC:
37J25
1. Introduction
Port-Hamiltonian systems proposed by Maschke et al. [1,2] are not only important by themselves, but also provide an important tool for controller design and stability analyses for nonlinear control systems. Their elegant mathematical representation, clear physical structure, and interconnections make them well suited for the modeling of practical systems. Most importantly, the Hamiltonian function of a port-Hamiltonian system defines the total system energy and can be applied to construct a Lyapunov function. Due to these properties, the energy-based port-Hamiltonian framework has natural advantages in nonlinear control problems [3,4,5,6,7,8,9].
Stochastic disturbances such as measurement errors, modeling inaccuracies, environment noises, and so on, are unavoidable. These may cause instability and performance degradations of a controlled system. Taking these stochastic phenomena into account in deterministic port-Hamiltonian systems drives the development of stochastic port-Hamiltonian systems (SPHSs). They make a good formulation about the process disturbances imposed on the systems by utilizing the It form and have drawn more recent attention [10,11,12,13,14]. Satoh and Fujimoto [10] proposed a passivity-based controller for stabilizing SPHSs in probability by coordinate transformations, which can preserve the stochastic port-Hamiltonian structure of the closed-loop system. To consider the influence of stochastic disturbances of the input and the process, Fang and Gao [11] extended SPHSs to input-disturbed SPHSs and constructed a passivity-based basic framework for the systems. Haddad et al. [12] provided an energy-based controller and a shaped energy function for SPHSs. Liu et al. [13] proposed a robust control law based on the dissipation of SPHSs.
The control methods mentioned above for SPHSs are proposed on the premise that the actuators work normally. However, actuator faults are common in performance-critical systems due to the irregular processes or material aging, and if not handled well, they may lead to undesired system behavior, instability, or even catastrophic accidents. Consequently, fault-tolerant control (FTC), which aims to achieve the desired stability and performance for faulty systems, has received increasing attention. Generally speaking, the available FTC methods can be divided into passive and active FTC. One can refer to [15,16] and the references therein for more information. The active FTC reacts to the faults by reconfiguring the controller with the online information provided by the fault detection and diagnosis (FDD) block, while the passive FTC deals with all the expected or presumed faults by using a unique controller, and it has neither an FDD block nor online control reconfiguration subsystems. Compared to the active FTC, the passive FTC has the drawback of being usable only for all the expected or presumed faults. However, as depicted in [16], it can avoid the time delay caused by the fault detection and controller reconfiguration. This paper considers passive FTC against actuator faults.
More attention has been paid to passive FTC approaches for deterministic nonlinear systems against the loss of actuator effectiveness, such as passivity-based control [17,18,19], sliding mode control [20,21], backstepping control [22,23,24], integral observers [25], etc. Benosman et al. [16,26] proposed a Lyapunov-based actuator FT controller for nonlinear systems, which ensures the locally uniformly asymptotic stability of the closed-loop systems, but as stated by the authors, it has two limitations to some extent. First, it strongly depends on the availability of an explicit Lyapunov function of the safe systems. Second, it is discontinuous because it involves a sign function and may cause the chattering phenomena in the control effort. It should be stressed that these results have no discussion on how to deal with stochastic disturbances.
Motivated by these considerations, this paper investigates the robust FTC for SPHSs subject to the loss of actuator effectiveness by utilizing the stochastic Hamiltonian structure. The major contributions of the paper are summarized below:
(1) An energy-based robust FT controller is developed for the faulty SPHSs against the loss of actuator effectiveness. Unlike the FT controller given in [26], it is continuous and does not lead to the chattering phenomenon caused by the discontinuity. Moreover, the FTC method avoids solving the Lyapunov function and Hamilton–Jacobi–Isaacs (HJI) inequalities associated with the nominal systems. Besides, an alternative condition is given to extend the application of the proposed controller.
(2) An energy-based robust adaptive FT controller is proposed for the faulty SPHSs to deal with parameter perturbations, as well as an alternative condition. Although involving a sign function, it preserves the main stochastic Hamiltonian structure and makes full use of the dissipation property of the systems. Hence, there is no need to solve the Lyapunov function and HJI inequalities either.
These results solve the robust FTC of deterministic port-Hamiltonian systems with actuator faults and the robust stabilization of safe fault-free SPHSs as special cases. An example of synchronous generators with steam valve control illustrates the effectiveness of the proposed methods.
The rest of this paper is organized as follows. Section 2 reviews some required preliminaries and formulates the FTC problem for SPHSs. Section 3 and Section 4 give the main contributions of this paper, namely an energy-based robust FT controller and an energy-based robust adaptive one. Section 5 presents an example and simulations. Conclusions are discussed in Section 6.
Notation: is the identity matrix, , for , and for .
2. Problem Formulation and Preliminaries
SPHSs were introduced in [10], and their autonomous input-state–output representation was given by the It form:
where , , and are the state, the control input, and the output, respectively, , , is an r-dimensional independent standard Wiener process defined on a complete probability space , is twice differentiable with , and are Borel measurable, has full column rank, and .
Here, we assume that the functions and satisfy the Lipschitz condition with respect to x, and the input is a measurable function and satisfies for all ; means the expectation under the measure . Under these conditions, there exists a pathwise unique solution to the system (1) for all .
In this paper, we consider the SPHS (1) subject to the loss of actuator effectiveness and external disturbances of the form
where is a continuous matrix function with , , is a stochastic exogenous disturbance signal with for all , , is a penalty signal, and has full column rank.
Remark 1.
The loss of actuator effectiveness is represented by a multiplicative matrix . The diagonal element means that the ith actuator loses its effectiveness partially.
The robust FTC problem for the faulty SPHS (2) is to design a feedback FT controller
such that for all , the equilibrium to the system is locally asymptotically stable in probability when , and meanwhile, the gain of the corresponding closed-loop system from to is bounded by a given disturbance attenuation level for , i.e., [27], for all ,
Definition 1
([28]). Consider the following stochastic system:
where , , , , , and are sufficiently differentiable with , and . Let be twice differentiable, then the infinitesimal generator of , , is defined as
where tr represents the trace of the argument.
Remark 2.
From a stochastic version of LaSalle’s theorem [29], the equilibrium solution is asymptotically stable in probability if and .
Definition 2
([30]). The system (4) is called zero-state detectable if for all , , implies . It is called zero-state observable if for all , implies .
Remark 3.
Lemma 1.
For any given x, and diagonal matrix , the following inequalities hold:
where sgn is a sign function.
The proof of Lemma 1 is straightforward according to the notations given in Section 1.
3. Energy-Based Robust FTC for SPHSs
This section proposes an energy-based robust FT controller for SPHSs against the loss of actuator effectiveness.
Theorem 1.
Proof.
Along the trajectories of the system (2) under the controller (8), we obtain
Since , . Associated with and , the Equation (9) yields
which implies
The It formulas give
which means the inequality (3) holds, i.e., the gain of the system (2) from to is no more than .
Setting in (10), we obtain
Hence the closed-loop system converges in probability to the largest invariant set contained in
With and , the zero-state detectability of the system concludes
Therefore, the closed-loop system is locally asymptotically stable in probability at . □
Remark 4.
Theorem 1 presents an energy-based robust FT controller for SPHSs against actuator faults and external disturbances. If the function is radially unbounded, the controller (8) solves the global robust FTC of SPHSs, that is it achieves the robustness against external disturbances while maintaining the globally asymptotical stability in probability.
Remark 5.
Different from the discontinuous FT controllers given in [26], the controller (8) is continuous and does not lead to the chattering phenomenon caused by the discontinuity. Besides, the proposed FTC method avoids solving the Lyapunov function of the nominal system because the Hamiltonian function serves as a Lyapunov function. Moreover, there is no need to solve HJI inequalities, a typical and relatively difficult process for nonlinear robust control design [31].
Remark 6.
Theorem 1 covers the robust FTC of deterministic port-Hamiltonian systems with actuator faults and the robust stabilization of fault-free SPHSs as specials. If the actuator works normally, i.e., , the controller (8) reduces to a robust stabilization controller for the SPHS (1) described by
which is similar to the one given in [13]. If there is no noise in the system, i.e., , it solves the robust FTC of deterministic port-Hamiltonian systems against the loss of actuator effectiveness.
Next, we give an alternative condition for the inequality (7). To this end, we should slightly modify the inequality (6) as
Theorem 2.
Proof.
Remark 7.
4. Energy-Based Robust Adaptive FTC for SPHSs
This section develops an energy-based robust adaptive FT controller for SPHSs against the loss of actuator effectiveness. Here, adaptive control is applied to deal with uncertain parameters.
Assume the structure of the system (2) involves parameter perturbations represented by a constant unknown vector . Then, the corresponding faulty system can be described as
where with , with , and . The other variables are the same as those in the system (2).
Here, we assume there exists satisfying
where and . The Equation (23) is called a matched condition, a common assumption in the adaptive control of port-Hamiltonian systems [7]. Additionally, we assume the following inequality holds:
On the basis of the controller (8), we design a robust adaptive controller for the faulty SPHS (22) as follows:
where is the estimate of , and is given in (8).
Remark 9.
The system (26) is not a strict SPHS because it has an additional term . However, it preserves the main stochastic Hamiltonian structure, which is important for stability studies and controller design.
Theorem 3.
Proof.
Along the trajectories of the system (26), we obtain:
From Lemma 1, it follows that
and
Then, together with , and , the inequality (27) gives
which implies the gain of the system (26) from to is no more than .
Choosing as a Lyapunov function and setting in (28), we obtain
Hence, the closed-loop system converges in probability to the following set
Therefore, the closed-loop system is locally asymptotically stable in probability at . □
Remark 10.
Theorem 3 develops an energy-based robust adaptive FT controller for SPHSs against actuator faults, external disturbances, and parameter perturbations. Exploiting the dissipation structure of SPHSs, the proposed adaptive FTC method also avoids solving the Lyapunov function of the nominal system and HJI inequalities.
Remark 11.
It should be pointed out that the controller (25) is discontinuous because it involves a sign function. We can follow the approach presented in [26] and approximate the discontinuous function sgn by a continuous function sat to eliminate the chattering effect that may be caused by the discontinuity, where with
for and . Then, under the following controller:
the closed-loop trajectories are bounded by a class function, and the bound is achieved as small as required by choosing a small s. The proof is similar to [26] and omitted.
Remark 12.
If , the controller (25) yields the following robust adaptive stabilization controller for the fault-free SPHSs:
If , it solves the robust adaptive FTC of deterministic port-Hamiltonian systems with actuator faults.
Similar to Theorem 2, we now give an alternative condition for the inequality (7). The inequality (24) should be modified as
Theorem 4.
The proof is similar to Theorem 2 and omitted.
Remark 13.
Remark 14.
Similarly, the closed-loop trajectories can be bounded by a class function under the continuous controller:
5. Simulations
This section exhibits the proposed stochastic FT controllers to a model of synchronous generators with steam valve control. The model is described by [32]:
where is the power angle of the generator, in radians, the rotor speed of the generator, in rad/sec, , the q-axis internal transient voltage of the generator, in per unit, the d-axis reactance, in per unit, the d-axis transient reactance of the generator, in per unit, , the reactance of transformer, in per unit, the reactance of transmission line, in per unit, the voltage of the field circuit of the generator, the control input in per unit, the steam valve control, in per unit, M the inertia coefficient of the generator, in seconds, D the damping constant, in per unit, , and are time constant, in seconds, infinite-bus voltage, in per unit, , , denote the external disturbances, the mechanical power, in per unit, and the mechanical power initial value, in per unit.
5.1. Hamiltonian Realization
To apply the proposed controllers, we first express the model (38) as a port-Hamiltonian system. The Hamiltonian realization method is derived from [7].
Let
and denote
Let be the pre-assigned operating point of the system, satisfying
where is the excitation input to obtain the physical operating point . Let
where is the new control input.
Setting , , and , the controllers (25) and (34) reduce to the controllers (8) and (17) as special cases, respectively. Hence, in what follows, we focus on the former thanks to their greater generality and assume d and e in the model have perturbations and , respectively. At the same time, the model is assumed to suffer from a stochastic noise and a type of loss-of-effectiveness faults of represented by the matrix
Let , and set the Hamiltonian function as
Then, the model (38) can be expressed as a faulty SPHS of the form
where and and are the chosen output and penalty signal, respectively,
5.2. Simulations
In this subsection, we give the simulation results under robust adaptive FT controllers. Since the condition (7) does not hold for the system, we simulate with the controller (34). The model parameters are given as follows:
We first check the conditions of Theorem 4. Let
then (23) holds. With Definition 2, it is easy to obtain the detectability of the system (42) when .
Next, we prove that (33) holds with the given , i.e.,
Then, when , .
We now report the simulation results when applying the controller (34), as well as the robust adaptive controller (RAC) proposed in [7] for comparison. In the simulations, the controllers were tested with , , , , , , and . In order to study the robustness against disturbances, we imposed an external disturbance:
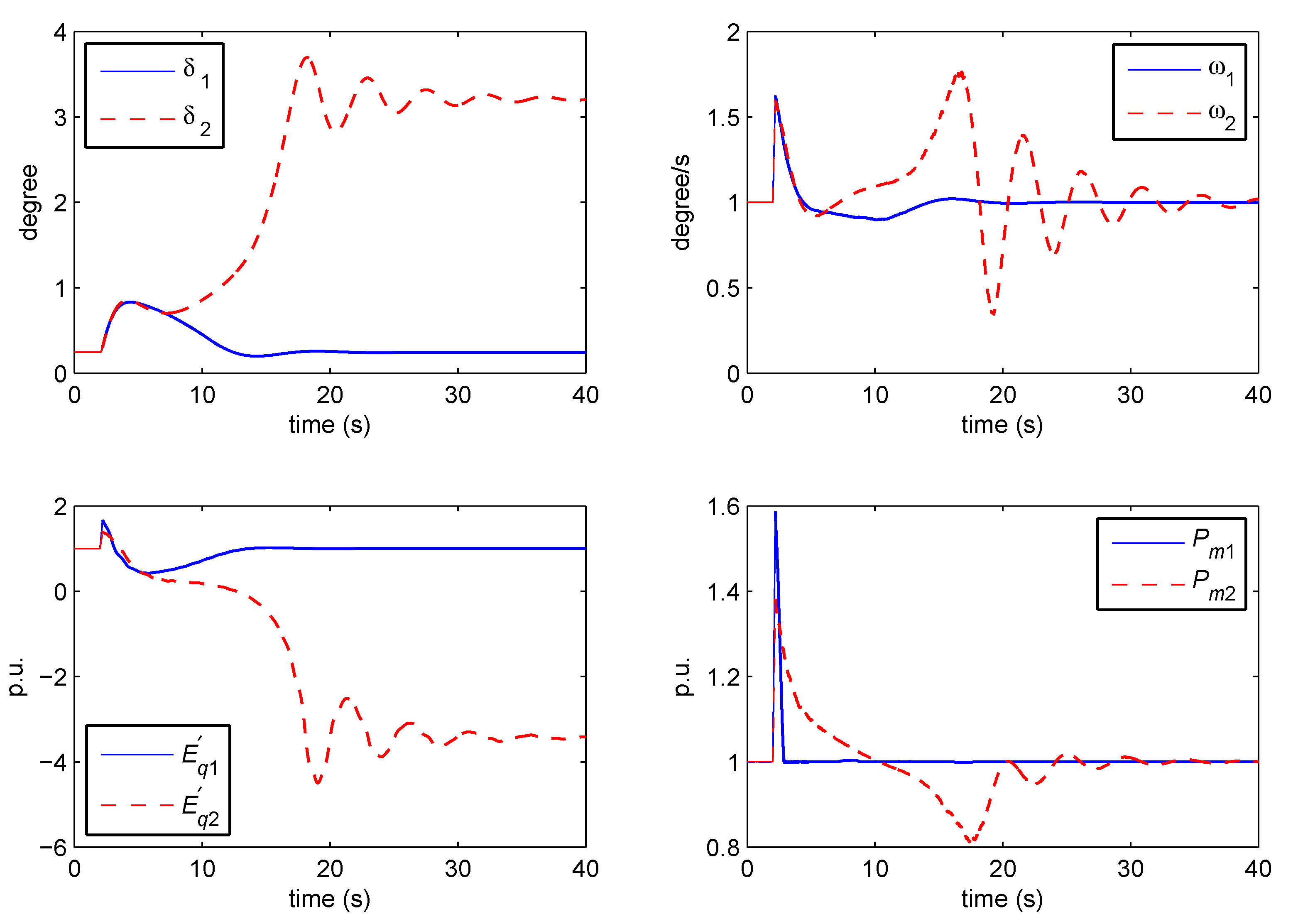
on the faulty system during the time period 2-2.2s. The resulting responses are shown in Figure 1 and Figure 2, where and are the responses of under the controller (34) and the RAC, respectively.
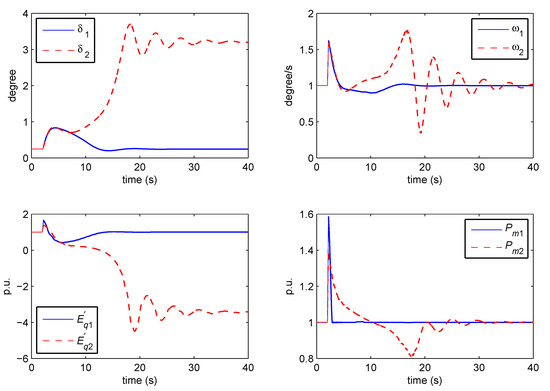
Figure 1.
Swing curves of under the controller (34) and the RAC, respectively.
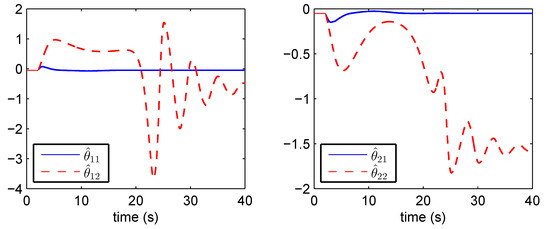
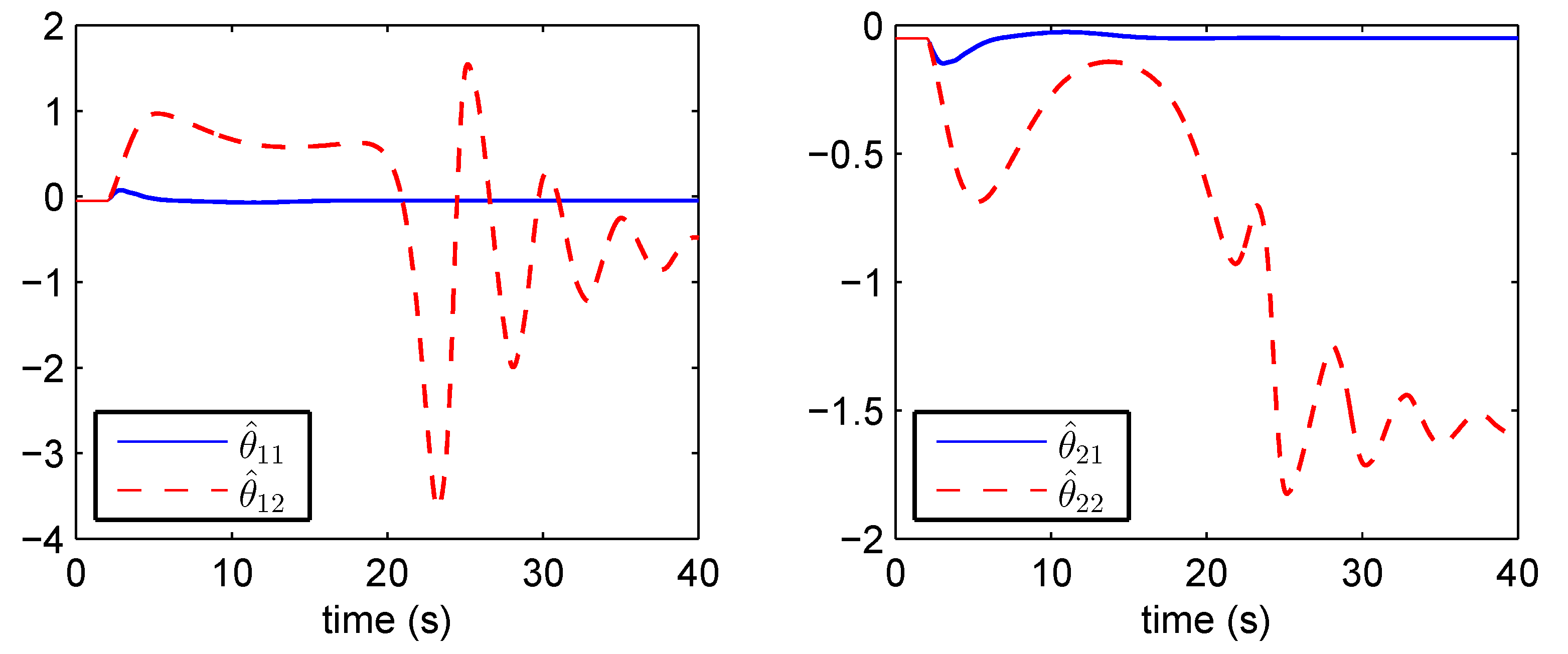
Figure 2.
Swing curves of under the controller (34) and the RAC, respectively.
From Figure 1, we see clearly that the RAC fails to stabilize the faulty system at the pre-assigned operating point and leads to the strong drift of the states. This shows it does not have the capability to accommodate the loss-of-effectiveness faults. However, the controller (34) not only drives the system to be asymptotically stable in probability at the operating point in the presence of actuator faults and stochastic noises, but also achieves the robustness against external disturbances and parametric perturbations. Moreover, as shown in Figure 2, the controller (34) provides a good estimate of the parametric perturbation, while the RAC cannot estimate it when actuator faults occur.
6. Conclusions
In this paper, we considered the passive FTC for SPHSs against actuator faults by exploiting the stochastic Hamiltonian structure. A continuous robust FT controller and a robust adaptive one, as well as alternative conditions were proposed for the faulty systems. The proposed FTC laws were obtained without solving the Lyapunov function and HJI inequalities associated with the nominal stabilizing controller; hence, they are easy to operate. These results include the stabilization of fault-free SPHSs and the actuators’ FTC of deterministic port-Hamiltonian systems. Compared to the existing adaptive controller, simulations on synchronous generators with steam valve control demonstrated the effectiveness of the proposed methods. In future research, we will explore continuous adaptive robust FT controllers for SPHSs.
Author Contributions
Formal analysis, S.X. and W.W.; Methodology, S.X., W.W. and S.-Y.C.; Writing—original draft, S.X. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China (No. 11226243), the Humanity and Social Science Youth Foundation of the Ministry of Education of China (18YJC910012) and the Scientific Research Fund of Zhejiang Provincial Education Department (No. Y201430940).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Maschke, B.; Schaft, A.V. Port-controlled Hamiltonian systems: Modeling origins and system theoretic properties. In Proceedings of the 2nd IFAC Symposium on Nonlinear Control System Design, Bordeaux, France, 24–26 June 1992; pp. 282–288. [Google Scholar]
- Maschke, B.; Schaft, A.V. The Hamiltonian formulation of energy conserving physical systems with external ports. Arch. Elektr. Übertrag. 1995, 49, 362–371. [Google Scholar]
- Maschke, B.; Ortega, R.; Schaft, A.V. Energy-based Lyapunov functions for forced Hamiltonian systems with dissipation. IEEE Trans. Autom. Control 2000, 45, 1498–1502. [Google Scholar] [CrossRef] [Green Version]
- Ortega, R.; Schaft, A.V.; Maschke, B.; Escobar, G. Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems. Automatica 2002, 38, 585–596. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, K.; Sakurama, K.; Sugie, T. Trajectory tracking control of port-controlled Hamiltonian systems via generalized canonical transformations. Automatica 2003, 39, 2059–2069. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, G.; Cheng, D. Simultaneous stabilization of a set of nonlinear port-controlled Hamiltonian systems. Automatica 2007, 43, 403–415. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y. Robust adaptive control of synchronous generators with SMES unit via Hamiltonian function method. Int. Syst. Sci. 2007, 38, 187–196. [Google Scholar] [CrossRef]
- Schöberl, M.; Siuka, A. On Casimir functionals for infinite dimensional port-Hamiltonian control systems. IEEE Trans. Autom. Control 2013, 58, 1823–1828. [Google Scholar] [CrossRef]
- Macchelli, A. Passivity-based control of implicit port-Hamiltonian systems. SIAM J. Control Optim. 2014, 52, 2422–2448. [Google Scholar] [CrossRef]
- Satoh, S.; Fujimoto, K. Passivity based control of stochastic port-Hamiltonian systems. IEEE Trans. Autom. Control 2013, 58, 1139–1153. [Google Scholar] [CrossRef]
- Fang, Z.; Gao, C. Stabilization of input-disturbed stochastic port-Hamiltonian Systems Via Passivity. IEEE Trans. Autom. Control 2017, 62, 4158–4166. [Google Scholar] [CrossRef]
- Haddad, W.M.; Rajpurohit, T.; Jin, X. Energy-based feedback control for stochastic port-controlled Hamiltonian systems. Automatica 2018, 97, 134–142. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, G.; Tang, S.; Cai, X.; Peng, J. Energy-based stabilisation and H∞ robust stabilisation of stochastic non-linear systems. IET Control Theory Appl. 2018, 12, 318–325. [Google Scholar] [CrossRef]
- Xu, S.; Wang, W.; Chen, S.Y. Energy-based output regulation for stochastic port-Hamiltonian systems. Int. J. Robust Nonlinear Control 2021, 31, 1720–1734. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Benosman, M. A survey of some recent results on nonlinear fault tolerant control. Math. Probl. Eng. 2010, 586169. [Google Scholar] [CrossRef]
- Liu, Z.; Theilliol, D.; Yang, L.; He, Y.; Han, J. Interconnection and damping assignment passivity-based control design under loss of actuator effectiveness. J. Intell. Robot. Syst. 2020, 100, 29–45. [Google Scholar] [CrossRef]
- Benosman, M.; Lum, K. Application of passivity and cascade structure to robust control against loss of actuator effectiveness. Int. J. Robust Nonlinear Control 2010, 20, 673–693. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Hernández-González, O.; Valencia-Palomo, G.; Mercado-Ravell, D.A.; López-Estrada F., R. Hoyo-Montaño J.A. Robust IDA-PBC for under-actuated systems with inertia matrix dependent of the unactuated coordinates: Application to a UAV carrying a load. Nonlinear Dyn. 2021, 105, 3225–3238. [Google Scholar] [CrossRef]
- Nasiri, A.; Nguang, S.; Swain, A.; Almakhles, D. Passive actuator fault tolerant control for a class of MIMO nonlinear systems with uncertainties. Int. J. Control 2019, 92, 693–704. [Google Scholar] [CrossRef]
- Shen, Q.; Wang, D.; Zhu, S.; Poh, E. Integral-type sliding mode fault-tolerant control for attitude stabilization of spacecraft. IEEE Trans. Control Syst. Technol. 2015, 23, 1131–1138. [Google Scholar] [CrossRef]
- Li, Y.; Yang, G. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 2016, 72, 177–185. [Google Scholar] [CrossRef]
- Lin, X.; Dong, H. Tuning function-based adaptive backstepping fault-tolerant control for nonlinear systems with actuator faults and multiple disturbances. Nonlinear Dyn. 2018, 91, 2227–2239. [Google Scholar] [CrossRef]
- Hu, Q.; Xiao, B. Fault-tolerant attitude control for spacecraft under loss of actuator effectiveness. J. Guid. Control Dyn. 2011, 34, 927–932. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; López-Estrada, F.; Valencia-Palomo, G.; Rotondo, D.; Guerrero-Sónchez, M. Actuator and sensor fault estimation based on a proportional multiple-integral sliding mode observer for linear parameter varying systems with inexact scheduling parameters. Int. J. Robust Nonlinear Control 2021, 31, 3225–3238. [Google Scholar] [CrossRef]
- Benosman, M.; Lum, K. Passive Actuators’ Fault-Tolerant Control for Affine Nonlinear Systems. IEEE Trans. Autom. Control 2010, 18, 152–163. [Google Scholar] [CrossRef]
- Berman, N.; Shaked, U. H∞ control for non-linear stochastic systems: The output-feedback case. Int. J. Control 2008, 81, 1733–1746. [Google Scholar] [CrossRef] [Green Version]
- Khasminskii, R. Stochastic Stability of Differential Equations; Springer: Berlin/Heidelberg, Germnay, 2012. [Google Scholar]
- Mao, X. Stochastic versions of the LaSalle theorem. J. Diff. Equ. 1999, 153, 175–195. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Chen, B. State feedback H∞ control for a class of nonlinear stochastic systems. SIAM J. Control Optim. 2006, 44, 1973–1991. [Google Scholar] [CrossRef]
- Isidori, A.; Astolfi, A. Disturbance attenuation and H∞ control via measurement feedback in nonlinear systems. IEEE Trans. Autom. Control 1992, AC-37, 1283–1293. [Google Scholar] [CrossRef]
- Xi, Z.; Feng, G.; Cheng, D.; Lu, Q. Nonlinear decentralized saturated controller design for power systems. IEEE Trans. Control Syst. Technol. 2003, 11, 539–547. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).