
Two-Stage Optimal Active-Reactive Power Coordination for Microgrids with High Renewable Sources Penetration and Electrical Vehicles Based on Improved Sine−Cosine Algorithm

Abstract
:1. Introduction
- Formulation of the complex Optimal Active and Reactive Power Coordination problem aiming at minimizing the microgrid active energy losses by determining the optimal scheduling for multiple BESS, EVs charging, DG, and CB reactive power output.
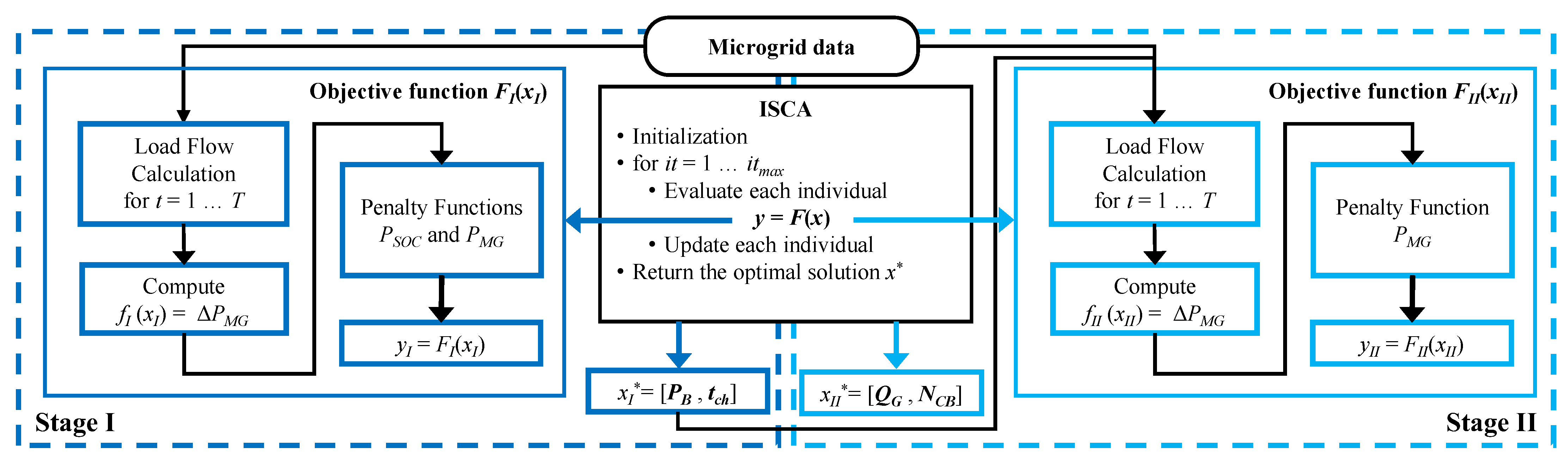
- Adaptation of the OARPC problem for metaheuristic solvers, consisting in performing the load flow calculation using a backward-forward sweep method and implementing penalty functions in order to assure that all the equality and inequality constraints are enforced. Furthermore, as the OARPC problem is solved in two successive stages, its increased complexity could significantly reduce the metaheuristic solver performance. The first stage focuses on optimizing the active power by scheduling the BESSs and EVs, then the second stage determines the optimal reactive power output of the DGs and CBs.
- Development of the Improved Sine-Cosine Algorithm, by introducing several mutation operators for enhancing both the exploration and exploitation phases’ performances.
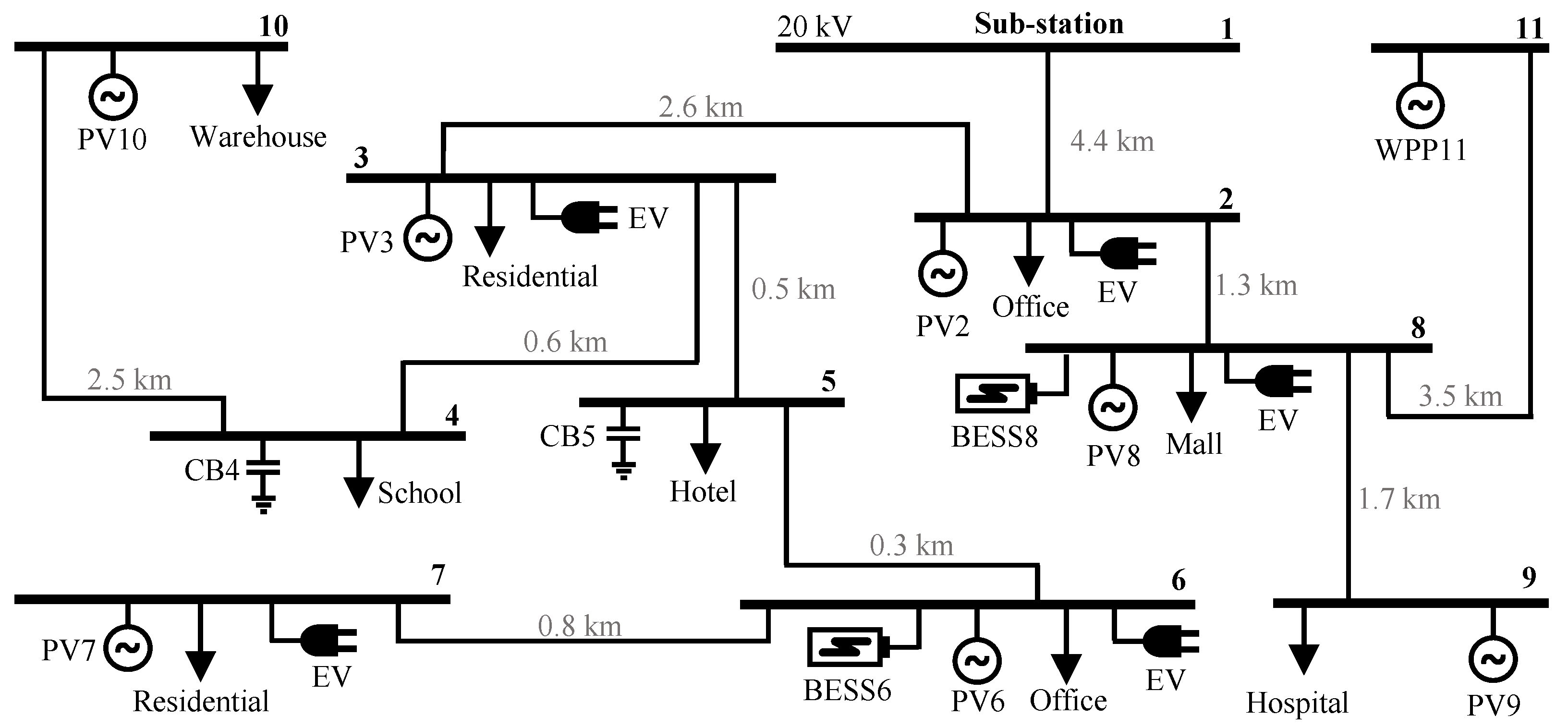
- It should also be mentioned, that the microgrid under study is proposed by the authors, inspired by the CIGRE MV Benchmark Network, and that all simulations presented in this study are conducted by using a software package developed by the authors under the Matlab environment.
2. Mathematical Model
2.1. Optimization Problem Formulation
2.2. Microgrid Modelling
2.3. Equality Constraints
2.4. Inequality Constrains
2.4.1. Battery Energy Storage System Constraints
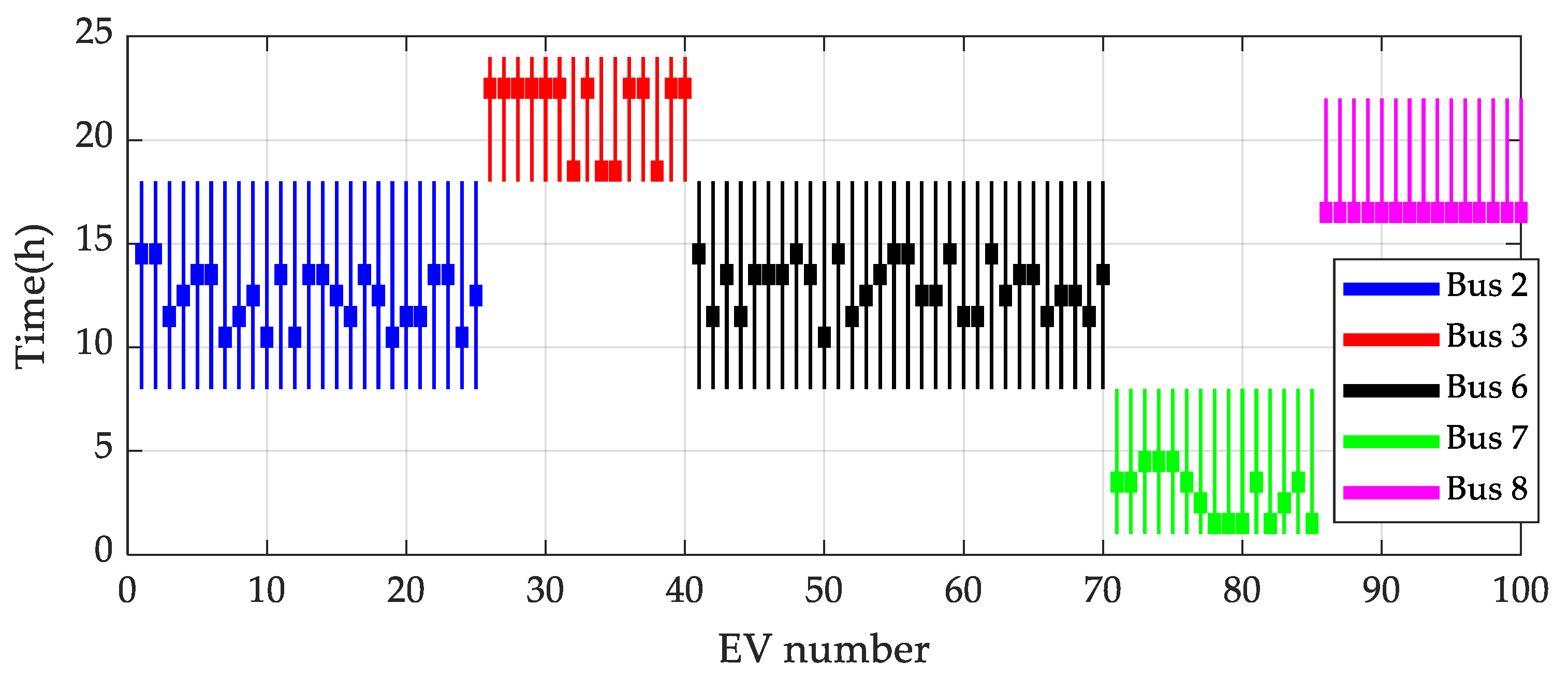
2.4.2. Electric Vehicles Constraints
2.4.3. Generator Constraints
2.4.4. Capacitor Banks Constraints
2.4.5. Microgrid Operational Constraints
2.5. Improved Sine Cosine Algorithm
| Algorithm 1. Improved Sine-Cosine Algorithm |
| 1. Initialize population of N solutions 2. For t = 1: Tmax 3. Update the N solutions’ position according to Equation (21) in iteration t. 4. Determine the percentage of mutated solutions (in 5…35% range): 5. For i = 1: Nmut 6. Choose two random positions pos1 and pos2 of the ith solution. |
| 7. Generate a random number p in [0, 1] range. 8. If p ≤ 0.2 9. Else if p ≤ 0.8 |
| 10. Else |
11. end 12. end |
3. Model Implementation
3.1. Two Stage Active-Reactive Power Coordinated Optimization
- the active power exchange between each of the nBESS battery energy storage systems (nBESS × T variables);
- the reactive power output for each distributed generators (nGEN × T variables);
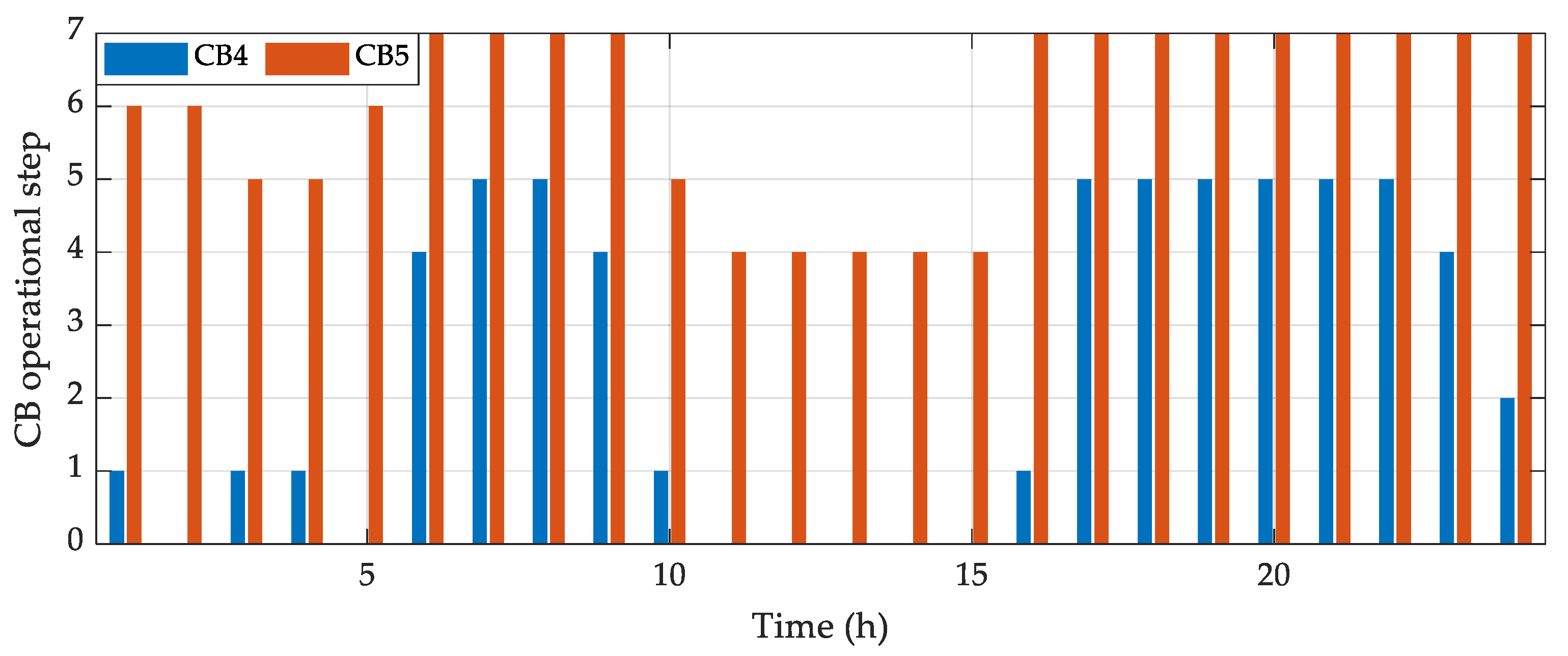
- operational step for each of the nCB capacitor banks (nCB × T variables);
- the charging starting time for each electrical vehicle (nEV variables).
3.2. Adaptations for Metaheuristic Solvers
3.2.1. Equality Constraints Integration
3.2.2. Inequality Constraints Integration
3.3. Simulation Framework
4. Case Study
4.1. Network under Study
4.2. ISCA Performance Analysis
4.3. Results and Discusion
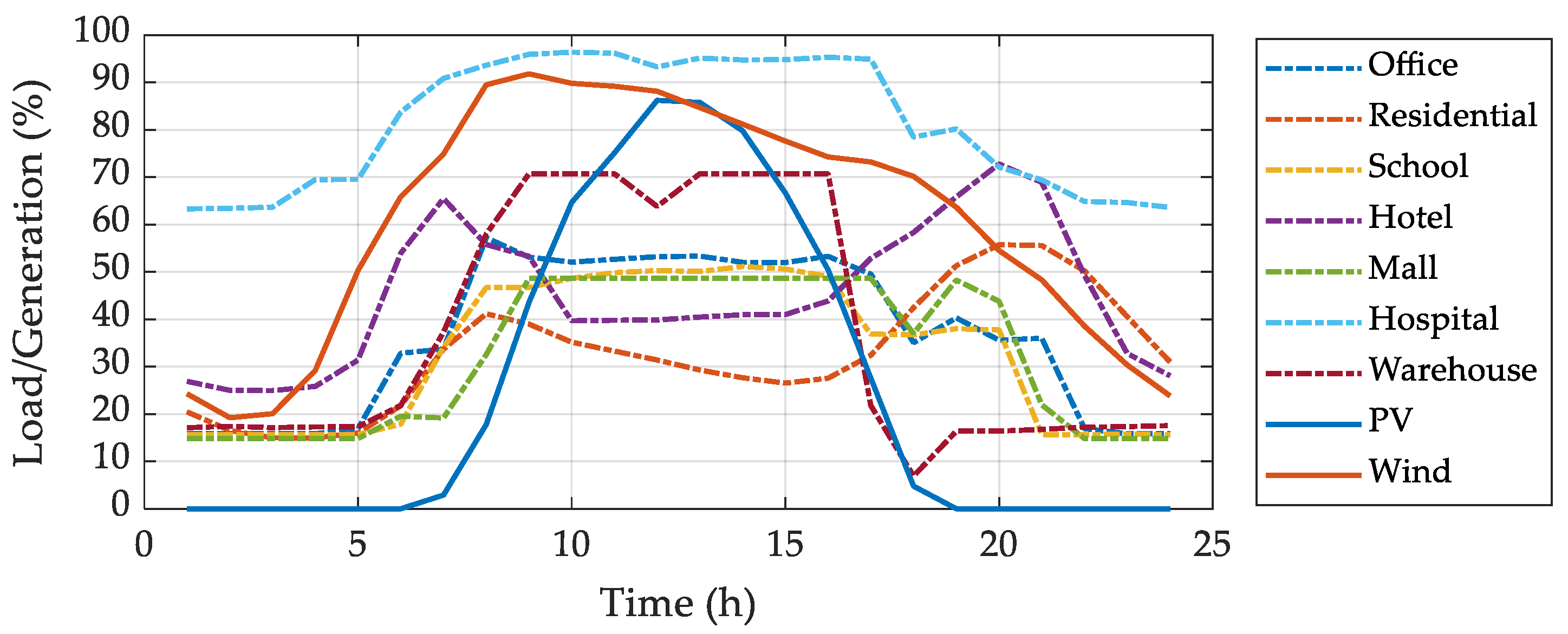
4.3.1. Microgrid Operational Conditions
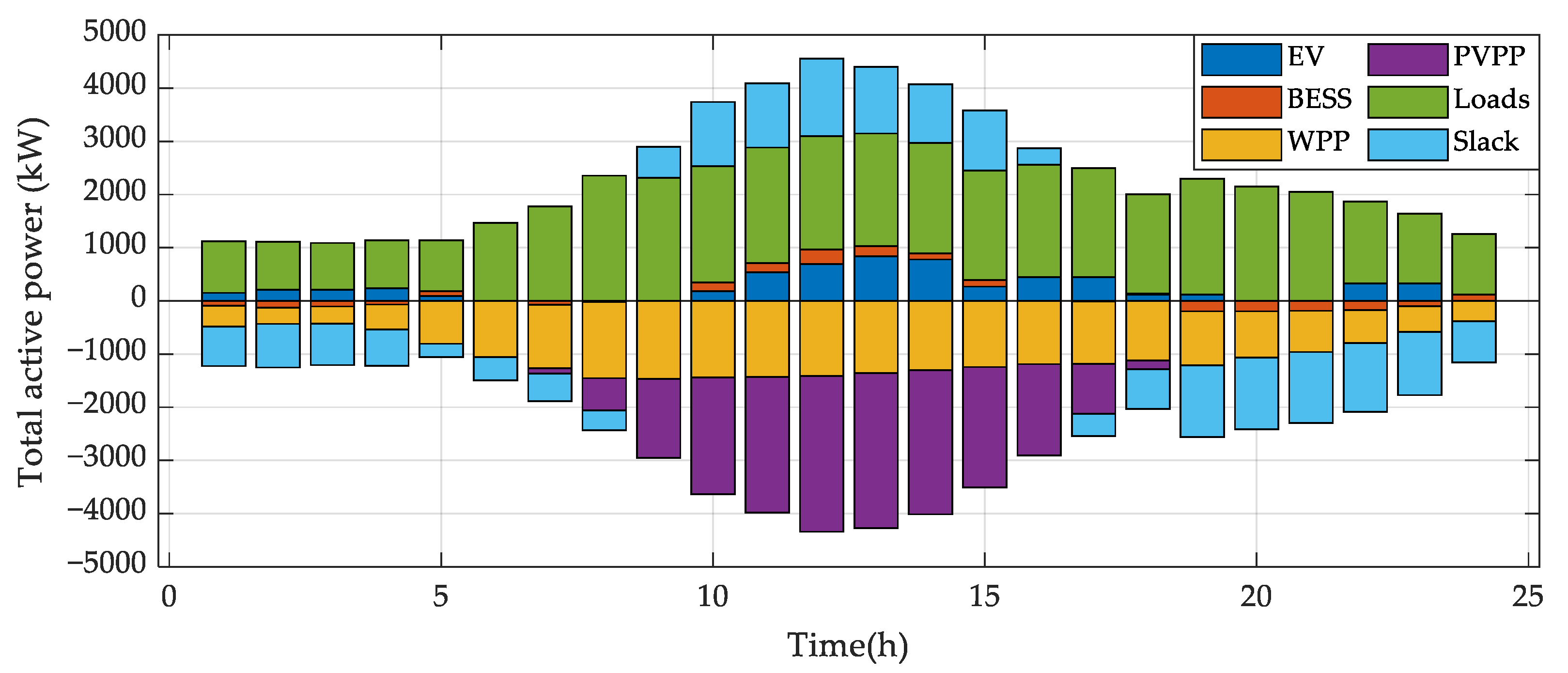
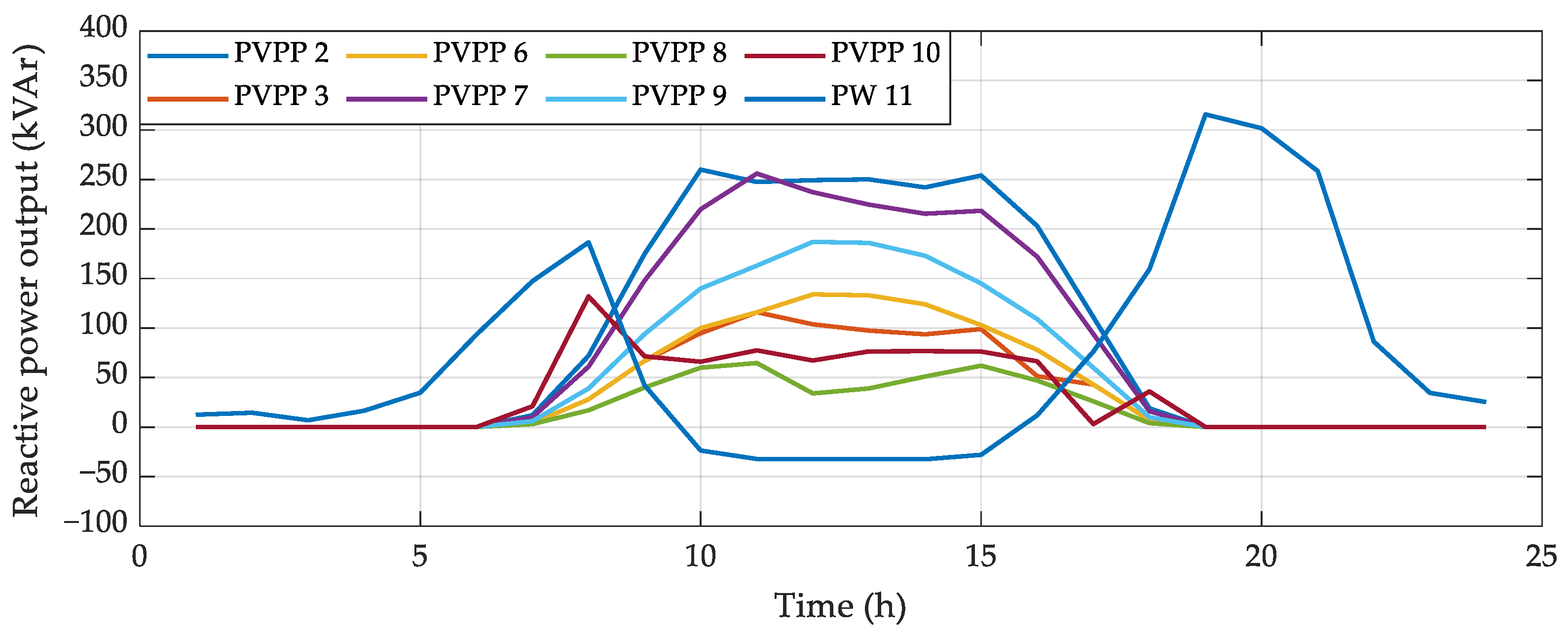
4.3.2. Centralized Active-Reactive Power Optimization for the Selected Day
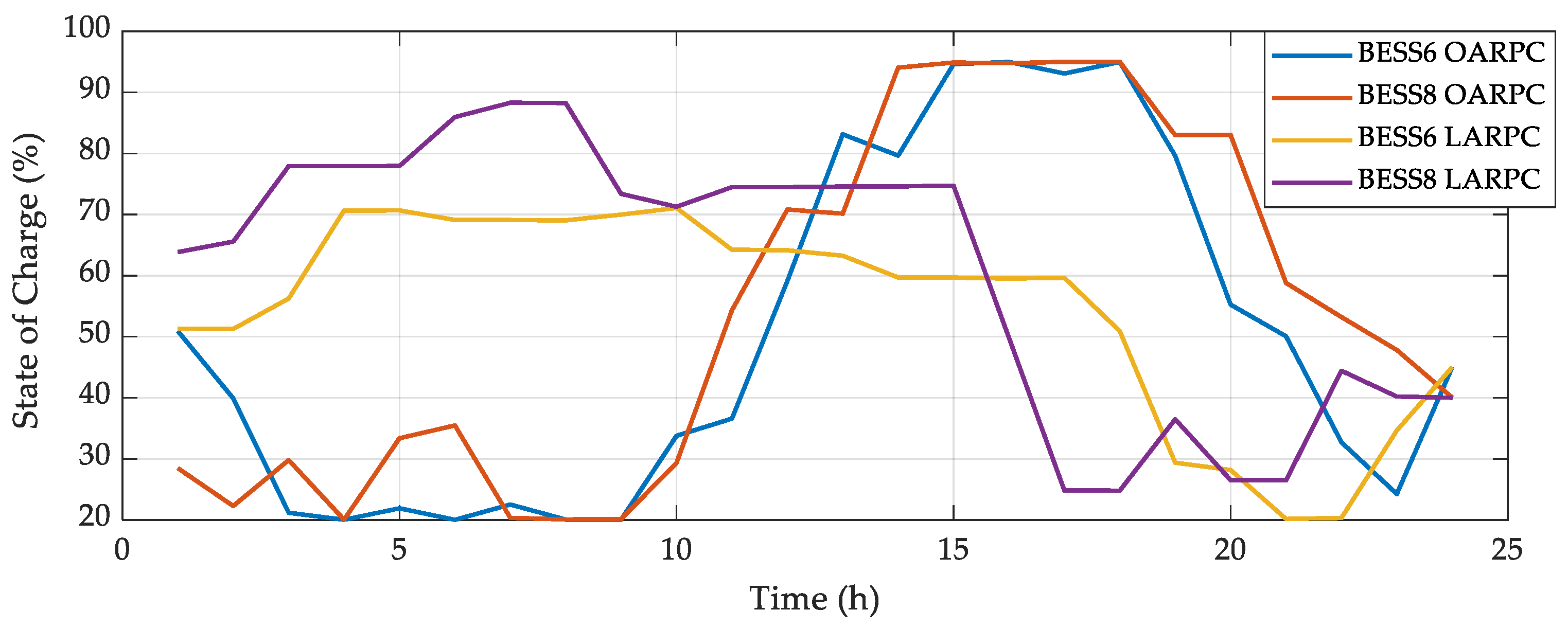
4.3.3. Local Active-Reactive Power Control for the Selected Day
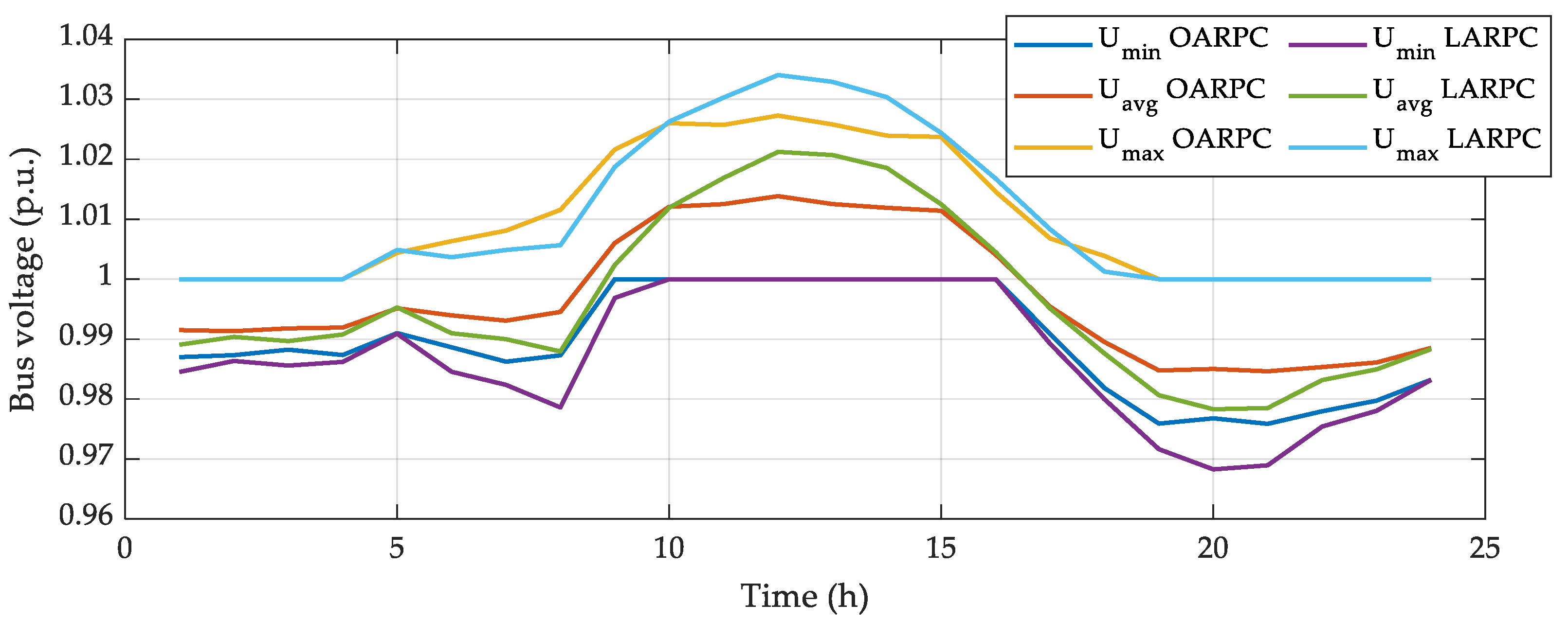
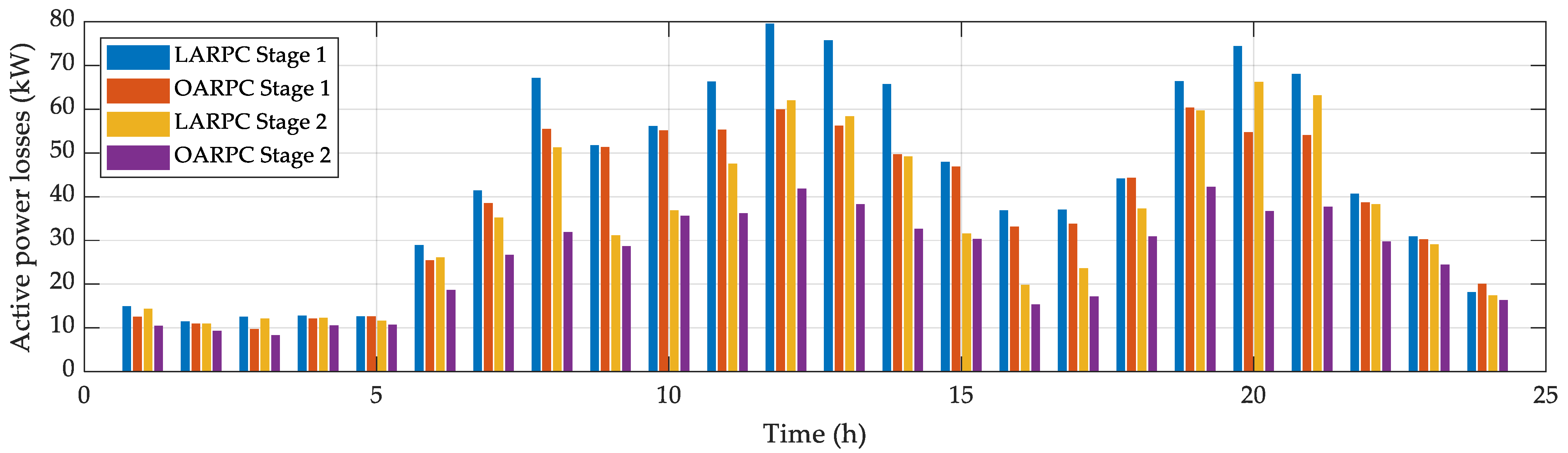
4.3.4. OARPC Impact upon Grid Operation for the Selected Day
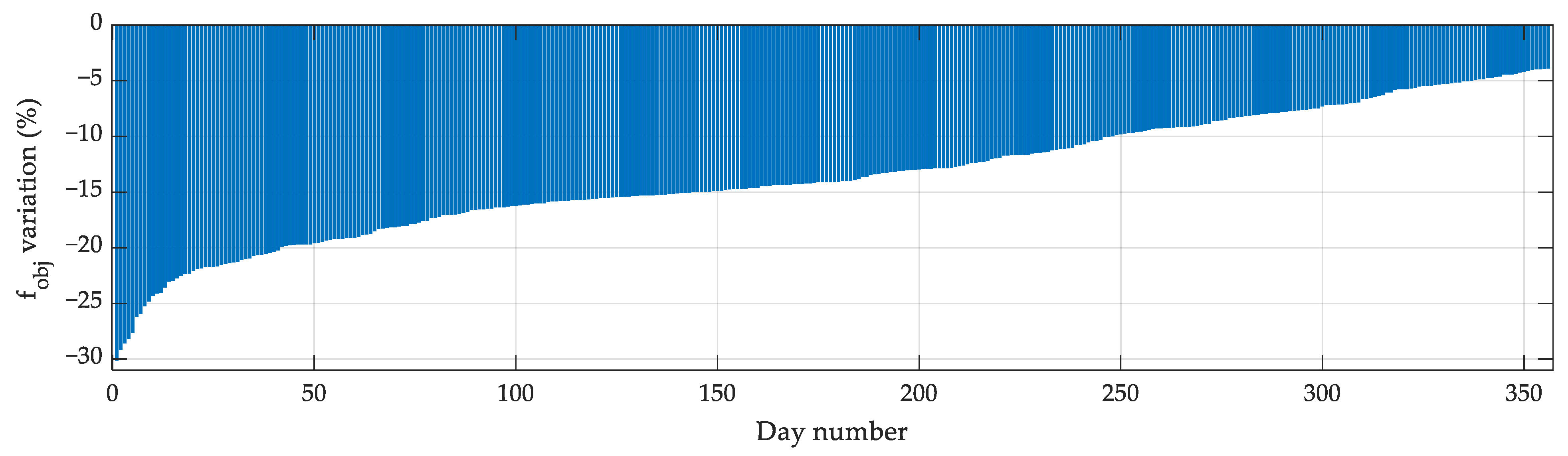
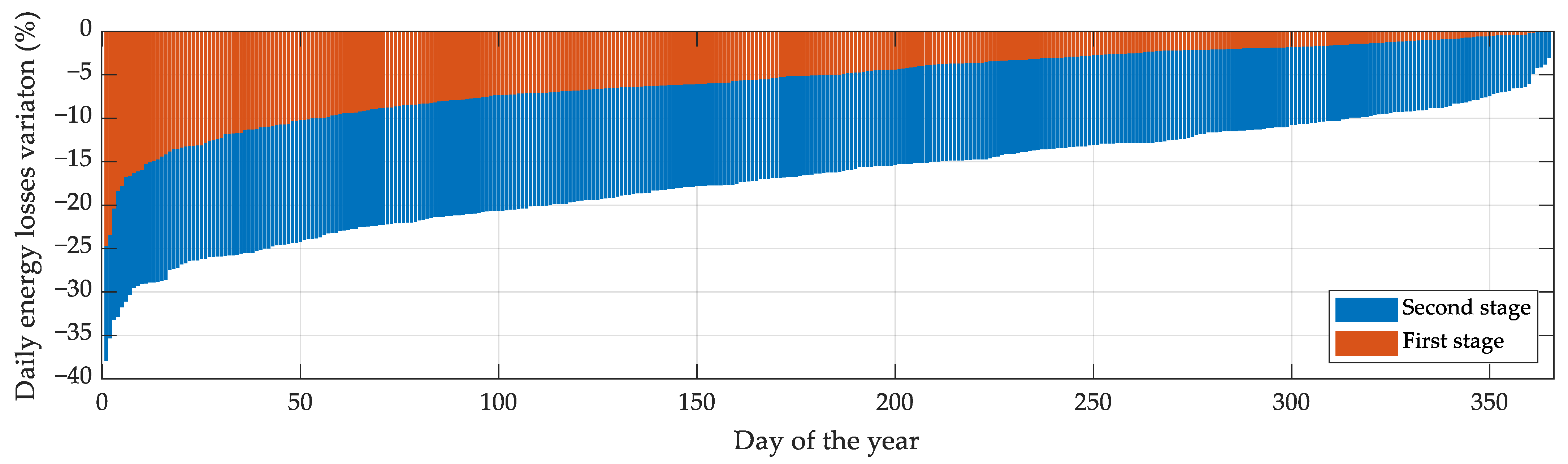
4.3.5. Overview of the OARPC Microgrid Operation Impact for One-Year Period
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schmidt, M.; Staudt, P.; Weinhardt, C. Decision support and strategies for the electrification of commercial fleets. Transp. Res. Part D Transp. Environ. 2021, 97, 102894. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q.; Hannan, M.; Jern, K.P.; Mansur, M.; Mahlia, T. Grid-connected renewable energy sources: Review of the recent integration requirements and control methods. J. Clean. Prod. 2020, 253, 119831. [Google Scholar] [CrossRef]
- Singh, J.; Tiwari, R. Probabilistic modeling and analysis of aggregated electric vehicle charging station load on distribution system. In Proceedings of the 14th IEEE India Council International Conference (INDICON), Roorkee, India, 16–17 December 2017. [Google Scholar]
- Mastoi, M.S.; Zhuang, S.; Munir, H.M.; Haris, M.; Hassan, M.; Usman, M.; Bukhari, S.S.H.; Ro, J.S. An in-depth analysis of electric vehicle charging station infrastructure, policy implications, and future trends. Energy Rep. 2022, 8, 11504–11529. [Google Scholar] [CrossRef]
- Sun, B.; Huang, Z.; Tan, X.; Tsang, D.H. Optimal scheduling for electric vehicle charging with discrete charging levels in distribution grid. IEEE Trans. Smart Grid 2018, 9, 624–634. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the impacts of plug-in hybrid electric vehicles on power distribution systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Dulău, L.I.; Bică, D. Effects of electric vehicles on power networks. Procedia Manuf. 2020, 46, 370–377. [Google Scholar] [CrossRef]
- Aghajan-Eshkevari, S.; Azad, S.; Nazari-Heris, M.; Ameli, M.T.; Asadi, S. Charging and discharging of electric vehicles in power systems: An updated and detailed review of methods, control structures, objectives, and optimization methodologies. Sustainability 2022, 14, 2137. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Huangfu, Y.; Ravey, A.; Chrenko, D.; Gao, F. Hierarchical operation of electric vehicle charging station in smart grid integration applications—An overview. Int. J. Electr. Power Energy Syst. 2022, 139, 108005. [Google Scholar] [CrossRef]
- Xu, S.; Yan, Z.; Feng, D.; Zhao, X. Decentralized charging control strategy of the electric vehicle aggregator based on augmented Lagrangian method. Int. J. Electr. Power Energy Syst. 2019, 104, 673–679. [Google Scholar] [CrossRef]
- Cheng, S.; Feng, Y.; Wang, X. Application of lagrange relaxation to decentralized optimization of dispatching a charging station for electric vehicles. Electronics 2019, 8, 288. [Google Scholar] [CrossRef] [Green Version]
- Paudel, A.; Hussain, S.A.; Sadiq, R.; Zareipour, H.; Hewage, K. Decentralized cooperative approach for electric vehicle charging. J. Clean. Prod. 2022, 364, 132590. [Google Scholar] [CrossRef]
- Jain, A.; Karimi-Ghartemani, M. Mitigating adverse impacts of increased electric vehicle charging on distribution transformers. Energies 2022, 15, 9023. [Google Scholar] [CrossRef]
- Aygun, A.I.; Kamalasadan, S. Centralized charging approach to manage electric vehicle fleets for balanced grid. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), Trivandrum, India, 2–5 January 2022. [Google Scholar]
- Chen, H.; Hu, Z.; Zhang, H.; Luo, H. Coordinated charging and discharging strategies for plug-in electric bus fast charging station with energy storage system. IET Gener. Transm. Distrib. 2018, 12, 2019–2028. [Google Scholar] [CrossRef] [Green Version]
- Kucevic, D.; Englberger, S.; Sharma, A.; Trivedi, A.; Tepe, B.; Schachler, B.; Hesse, H.; Srinivasan, D.; Jossen, A. Reducing grid peak load through the coordinated control of battery energy storage systems located at electric vehicle charging parks. Appl. Energy 2021, 295, 116936. [Google Scholar] [CrossRef]
- Jiang, W.; Zhen, Y. A real-time EV charging scheduling for parking lots with PV system and energy store system. IEEE Access 2019, 7, 86184–86193. [Google Scholar] [CrossRef]
- Nour, M.; Ali, A.; Farkas, C. Mitigation of electric vehicles charging impacts on distribution network with photovoltaic generation. In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019. [Google Scholar]
- Li, S.; Zhang, T.; Liu, X.; Xue, Z.; Liu, X. Performance investigation of a grid-connected system integrated photovoltaic, battery storage and electric vehicles: A case study for gymnasium building. Energy Build. 2022, 270, 112255. [Google Scholar] [CrossRef]
- Dai, Q.; Liu, J.; Wei, Q. Optimal photovoltaic/battery energy storage/electric vehicle charging station design based on multi-agent particle swarm optimization algorithm. Sustainability 2019, 11, 1973. [Google Scholar] [CrossRef] [Green Version]
- Trivedi, R.; Patra, S.; Sidqi, Y.; Bowler, B.; Zimmermann, F.; Deconinck, G.; Papaemmanouil, A.; Khadem, S. Community-based microgrids: Literature review and pathways to decarbonise the local electricity network. Energies 2022, 15, 918. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Agelidis, V.G. Control strategies for microgrids with distributed energy storage systems: An overview. IEEE Trans. Smart Grid 2018, 9, 3652–3666. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, J.; Han, Y.; Zhao, Q. Coordination dispatch of electric vehicles charging/discharging and renewable energy resources power in microgrid. Procedia Comput. Sci. 2017, 107, 157–163. [Google Scholar] [CrossRef]
- Chang, S.; Niu, Y.; Jia, T. Coordinate scheduling of electric vehicles in charging stations supported by microgrids. Electr. Power Syst. Res. 2021, 199, 107418. [Google Scholar] [CrossRef]
- Conseil International des Grands Réseaux Électriques; Comité D’études C6. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; CIGRÉ: Paris, France, 2014; ISBN 978-2-85873-270-8. [Google Scholar]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Saddique, M.S.; Habib, S.; Haroon, S.S.; Bhatti, A.R.; Amin, S.; Ahmed, E.M. Optimal solution of reactive power dispatch in transmission system to minimize power losses using sine-cosine algorithm. IEEE Access 2022, 10, 20223–20239. [Google Scholar] [CrossRef]
- Liu, S.; Feng, Z.-K.; Niu, W.-J.; Zhang, H.-R.; Song, Z.-G. Peak operation problem solving for hydropower reservoirs by elite-guide sine cosine algorithm with gaussian local search and random mutation. Energies 2019, 12, 2189. [Google Scholar] [CrossRef] [Green Version]
- Attia, A.-F.; El Sehiemy, R.A.; Hasanien, H.M. Optimal power flow solution in power systems using a novel Sine-Cosine algorithm. Int. J. Electr. Power Energy Syst. 2018, 99, 331–343. [Google Scholar] [CrossRef]
- Abdel-Mawgoud, H.; Fathy, A.; Kamel, S. An effective hybrid approach based on arithmetic optimization algorithm and sine cosine algorithm for integrating battery energy storage system into distribution networks. J. Energy Storage 2022, 49, 104154. [Google Scholar] [CrossRef]
- Jouhari, H.; Lei, D.; Al-qaness, M.A.A.; Abd Elaziz, M.; Ewees, A.A.; Farouk, O. Sine-cosine algorithm to enhance simulated annealing for unrelated parallel machine scheduling with setup times. Mathematics 2019, 7, 1120. [Google Scholar] [CrossRef] [Green Version]
- Gabis, A.B.; Meraihi, Y.; Mirjalili, S.; Ramdane-Cherif, A. A comprehensive survey of sine cosine algorithm: Variants and applications. Artif. Intell. Rev. 2021, 54, 5469–5540. [Google Scholar] [CrossRef]
- Shaheen, A.M.; Spea, S.R.; Farrag, S.M.; Abido, M.A. A review of meta-heuristic algorithms for reactive power planning problem. Ain Shams Eng. J. 2018, 9, 215–231. [Google Scholar] [CrossRef]
- Rupa, J.A.M.; Ganesh, S. Power flow analysis for radial distribution system using backward/forward sweep method. Int. J. Electr. Comput. Electron. Commun. Eng. 2014, 10, 1540–1544. [Google Scholar]
- Eremia, M. Electric Power Systems—Electric Networks; Publishing House of the Romanian Academy: Bucharest, Romania, 2006; pp. 509–520. [Google Scholar]
- Simulated Load Profiles for DOE Commercial Reference Buildings (17 Years Using NSRD Data), U.S. Department of Energy. Available online: https://openei.org/datasets/dataset/simulated-load-profiles-17year-doe-commercial-reference-buildings (accessed on 6 November 2022).
- Pfenninger, S.; Staffell, I. Long-term patterns of European PV output using 30 years of validated hourly reanalysis and satellite data. Energy 2016, 114, 1251–1265. [Google Scholar] [CrossRef] [Green Version]
- Staffel, I.; Pfenninger, S. Using bias-corrected reanalysis to simulate current and future wind power output. Energy 2016, 114, 1224–1239. [Google Scholar] [CrossRef]
- Available online: https://www.renewables.ninja/ (accessed on 6 November 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus Number | Load Type | PL,max (kW) | QL,max (kVAr) | nEV (–) | tarr–tdep (hhmm) | DG Type | PG,max (kW) | QG,max (kVAr) | WB,max (kWh) | PB,max (kW) | NCB × QCB,r (kVAr) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | – | – | – | – | – | – | – | – | – | – | – |
| 2 | Office | 825 | 615 | 25 | 700–1659 | PVPP | 650 | 315 | – | – | – |
| 3 | Residential | 625 | 385 | 15 | 1700–2359 | PVPP | 250 | 121 | – | – | – |
| 4 | School | 145 | 105 | – | – | – | – | – | – | – | 5 × 50 |
| 5 | Hotel | 370 | 250 | – | – | – | – | – | – | – | 7 × 50 |
| 6 | Office | 880 | 555 | 30 | 700–1659 | PVPP | 250 | 121 | 900 | 225 | – |
| 7 | Residential | 925 | 650 | 15 | 000–759 | PVPP | 550 | 266 | – | – | – |
| 8 | Mall | 250 | 180 | 15 | 1500–2159 | PVPP | 150 | 73 | 600 | 150 | – |
| 9 | Hospital | 305 | 225 | – | – | PVPP | 350 | 170 | – | – | – |
| 10 | Warehouse | 175 | 135 | – | – | PVPP | 1200 | 581 | – | – | – |
| 11 | – | – | – | – | – | WPP | 1600 | 775 | – | – | – |
| N | Tmax | trun (s) | Δtrun (%) | fobj | Δfobj (%) | ||
|---|---|---|---|---|---|---|---|
| ISCA | SCA | ISCA | SCA | ||||
| 50 | 50 | 8.4 | 8.3 | 1.0% | 111.0 | 362,647.8 | N/A |
| 100 | 100 | 34.1 | 33.1 | 2.8% | 98.3 | 107.7 | −9.5% |
| 150 | 150 | 74.5 | 73.1 | 2.0% | 87.0 | 105.9 | −21.7% |
| 200 | 200 | 134.7 | 131.2 | 2.6% | 84.4 | 101.7 | −20.6% |
| 250 | 250 | 212.1 | 206.4 | 2.7% | 82.0 | 100.9 | −23.1% |
| 300 | 300 | 308.7 | 295.9 | 4.2% | 79.9 | 100.0 | −25.1% |
| 350 | 350 | 414.7 | 395.2 | 4.7% | 79.4 | 97.2 | −22.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sidea, D.O.; Tudose, A.M.; Picioroaga, I.I.; Bulac, C. Two-Stage Optimal Active-Reactive Power Coordination for Microgrids with High Renewable Sources Penetration and Electrical Vehicles Based on Improved Sine−Cosine Algorithm. Mathematics 2023, 11, 45. https://doi.org/10.3390/math11010045
Sidea DO, Tudose AM, Picioroaga II, Bulac C. Two-Stage Optimal Active-Reactive Power Coordination for Microgrids with High Renewable Sources Penetration and Electrical Vehicles Based on Improved Sine−Cosine Algorithm. Mathematics. 2023; 11(1):45. https://doi.org/10.3390/math11010045
Chicago/Turabian StyleSidea, Dorian O., Andrei M. Tudose, Irina I. Picioroaga, and Constantin Bulac. 2023. "Two-Stage Optimal Active-Reactive Power Coordination for Microgrids with High Renewable Sources Penetration and Electrical Vehicles Based on Improved Sine−Cosine Algorithm" Mathematics 11, no. 1: 45. https://doi.org/10.3390/math11010045