1. Introduction
The abuse of high beams dazzles the oncoming driver during a meeting at night, which causes nearly half of all nighttime traffic accidents [
1]. Therefore, the anti-halation technology to improve night driving safety has attracted continuous attention from the research community.
The existing active anti-halation methods include sticking polarizing film on the front windscreen [
2], infrared night vision imaging [
3,
4,
5], an array of CCD image sensors with a pixel integration time independently controllable [
6], two visible image fusions with different light integration times [
7], etc. Among them, multi-exposure image fusion [
8] and infrared and visible image fusion [
9,
10] have lower halation retention and better visual effects.
By fusing multiple images taken in succession with different exposure levels, multi-exposure image fusion can obtain a good visual effect in static night vision scenes [
11]. However, in dynamic night vision scenes, the fast-moving objects will produce artifacts in the fusion image. In addition, multiple visible images belong to same-source images, lack information complementarity, and have failure problems in strong halation scenes.
Taking advantage of the information complementarity of different source images, the infrared and visible image fusion method simultaneously takes infrared and visible images of the same scene. The obtained fusion images have rich-in-color details and are without halation. The method is more suitable for dynamic night-vision halation scenes. Reference [
12] proposes an improved rolling guidance filter (IRGF) to decompose infrared and visible images. According to the brightness of a visible image, the image to be fused is divided into three regions. By assigning different fusion weights to different regions, the brightness of the fusion image is more consistent with the human vision. Reference [
13] proposes an adaptive-parameter simplified pulse-coupled neural network (AP-SPCNN) to fuse the high-frequency components of NSST decomposition. This method takes advantage of the global coupling and pulse synchronization of the network to improve the definition of the fusion image.
Reference [
14] decomposes infrared and visible images by the fourth-order partial differential equation (FPDE) and fuses the low-frequency components by expectation maximization strategy, which effectively improves the salient information of the fusion images. In reference [
15], the designed fusion rules based on regional energy (RE) and intuitionistic fuzzy sets (IFS) preserve the important target and texture information in the resulting image, respectively. Reference [
16] adopts tetrolet transform (TT) to decompose the visible and infrared image and use convolutional sparse representation (CSR) to fuse the high-frequency components, which effectively improves the visual effect of the fused image.
However, the halation information also belongs to the salient information in night vision images; the above methods will enlarge the halation areas while enhancing the detailed information of the fusion image, which is not conducive to the safety of driving at night. In reference [
17], the low-frequency components obtained by the Wavelet transform are weighted and fused to weaken halation interference in fusion images. However, Wavelet transform lacks the retention of edge information, so the definition of the fusion image is not good. In addition, due to the weighted strategy adopted, the halation information still participates in the fusion and leads to insufficient halation elimination in strong halation scenes. Reference [
18] designs a low-frequency coefficient weight automatic adjustment strategy. The strategy allocates higher weights to the pixels of infrared low-frequency components corresponding to the high-brightness areas of visible images, which can eliminate halation more completely. However, it also causes some high-brightness important information to be mistakenly eliminated.
In the field of image processing linked to artificial intelligence, reference [
19] uses a new filter derived from discrete Chebyshev wavelet transformations (DCHWT) convoluted with neural networks to effectively enhance the image quality. Reference [
20] proposes a convolution-guided transformer framework (CGTF) for infrared and visible image fusion, which combines the local features of the convolutional network and the long-range dependence features of the transformer to produce a satisfactory fused image. However, the above algorithms require sufficient sample datasets to improve the image processing effect.
The main contributions of this paper are: (1) A novel night vision anti-halation algorithm of different-source image fusion based on low-frequency sequence generation is introduced. (2) The low-frequency sequence generation model is constructed to generate image sequences with different degrees of halation elimination. (3) The sequence synthesis based on visual information maximization is proposed. According to the estimated illuminance for image sequences, the membership function of visual information maximization assigns a large weight to the areas with good brightness to generate a fusion image conforming to human visual perception. (4) An experimental study is conducted in four typical halation scenes. The experimental outcomes illustrate that the proposed algorithm has the advantages of eliminating the halation completely and retaining the high-brightness useful information in different night vision halation scenes.
The remainder of the article is arranged as follows:
Section 2 presents the night vision anti-halation principle based on low-frequency sequence generation.
Section 3 describes a step-by-step realization of the night vision anti-halation algorithm.
Section 4 gives the experiential results and discussion. Lastly,
Section 5 represents the conclusion.
2. Night Vision Anti-Halation Principle Based on Different Source Image Fusion
Figure 1 shows the original images, the fusion image, and the clustering map of visible images in the typical night halation scene.
It is evident from
Figure 1a that the headlights form high-brightness halation areas. Some important information in the areas closer to the headlights, such as lane lines, license plates, and front-row pedestrians, benefits from the high-brightness halation and becomes more obvious. However, it also makes it more difficult to observe dark areas farther away from the halation, such as back-row pedestrians and background contours.
As can be seen in
Figure 1b, the contours of vehicles, pedestrians, and background in the infrared image are clearly visible. However, the infrared image is a gray-level image with low resolution and missing details and exists on some problems, such as disappearing license plate information and indistinct lane lines.
From
Figure 1c, in the fusion image of visible and infrared images, the high-brightness halation is completely eliminated, and the color and details are rich, which is suitable for human visual perception and helps to improve night driving safety [
18]. However, there is an obvious light–dark splitting phenomenon in the fusion image, and the important information, such as license plate and lane lines, that was originally clear in the visible image is also eliminated or weakened.
Figure 1d is the cluster map of the visible image shown in
Figure 1a [
21]. By comparing
Figure 1a,d, it can be seen that the high-brightness areas contain a large amount of halation information and a small amount of important information, such as license plates and lane lines. In the areas closer to the halation, the brightness increases obviously.
By comparing
Figure 1c,d, it is notable that the fusion algorithm takes high-brightness license plates and lane lines as high-brightness halation to eliminate. Moreover, due to the excessive brightness elimination of halation areas, the fusion image appears to be an obvious light–dark splitting phenomenon.
According to the above analysis, the halation must be high-brightness information, but not vice versa. The existing night vision anti-halation algorithms based on visible and infrared image fusion distinguish the halation and the non-halation information by brightness, which will inevitably lead to the mis-elimination of useful high-brightness information. Meanwhile, in different night halation scenes, it is difficult to define the optimal division of the halation area and the best halation elimination effect, as well as whether there is insufficient or excessive halation elimination.
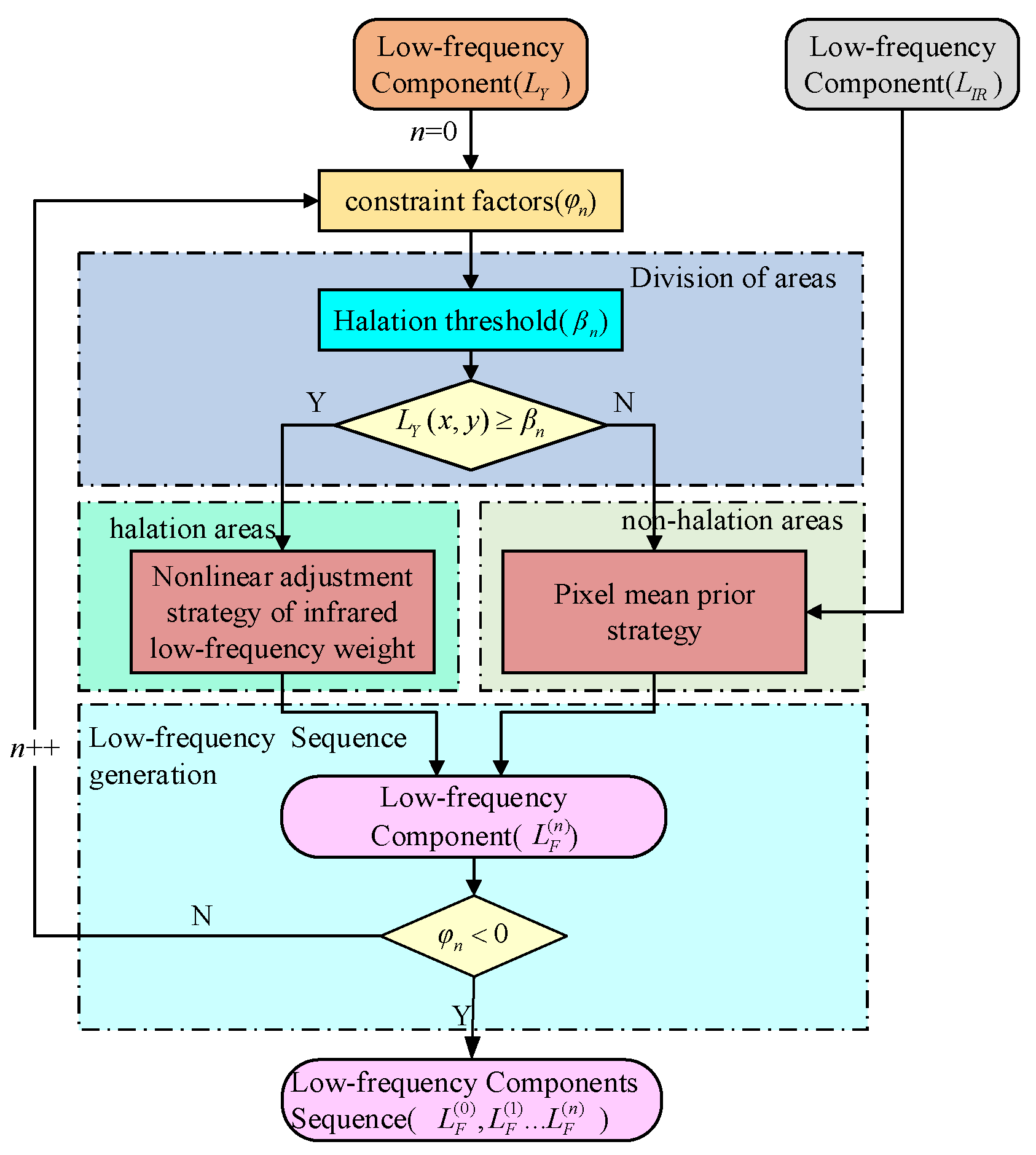
In order to address the above problems, the core idea of the algorithm in this paper is to adjust the brightness of all areas of the fusion image to the range of human visual perception so as to eliminate the high-brightness halation while retaining the high-brightness important information. In this paper, the low-frequency sequence generation model is constructed to output the low-frequency sequences of the brightness component with different halation elimination degrees, and the membership function of visual information maximization is designed to give greater weight to the areas suitable for human vision according to the illumination estimation. In this way, the obtained fusion image is more suitable for human visual perception.
Firstly, the Luminance
Y, the Chrominance
U, and
V of the visible image are obtained by the YUV transform. Then, curvelet decomposition is used to get the low-frequency and high-frequency components of the Luminance
Y and the infrared image, respectively. The obtained low-frequency components are input into the low-frequency sequence generation model to get the fused low-frequency sequences with the halation elimination degrees from small to large. The obtained high-frequency components are processed by the maximum modulus strategy to get the fused high-frequency component. The fused low-frequency sequences and the fused high-frequency component were reconstructed by curvelet transform to get the anti-halation brightness sequence
YAH. The fusion weight of each component in the sequence
YAH is determined according to their illumination estimation results. Then the weighted sum of the sequence
YAH gets a new Luminance
Y′. Finally, the Luminance
Y′ and the original Chrominance
U and
V are fused by the inverse YUV transformation to obtain the fusion image without halation. The overall block diagram of the proposed night vision anti-halation algorithm is shown in
Figure 2.
4. Experimental Results and Discussion
To verify the effectiveness of the proposed algorithm, the visible and infrared images are collected on four typical halation scenes covering most cases of night driving, i.e., small halation of residential road, large halation of residential road, large halation of urban trunk road and large halation of rural road. The visible and infrared images are acquired by the visible camera Basler acA1280-60gc and the far infrared camera Gobi-640-GigE. The experiments are performed using an Intel(R) Core (TM) i7-10875H CPU @2.30GHz, NVIDIA GeForce RTX2060, and Windows 10 64-bit operating system. The simulation software is MATLAB2020a. The size of input visible and infrared images is 640 × 480.
The proposed algorithm is compared with IGFF [
12], AP-SPCNN [
13], FPDE [
14], RE-IFS [
15], TT-CSR [
16], YUVWT [
17], IHSDCT [
18], and the experimental results are objectively evaluated by the adaptive partition quality evaluation method of night vision anti-halation fusion image [
27].
In the halation area, the degree of halation elimination (DHE) is used to evaluate the anti-halation effect. The larger the DHE is, the more complete the halation elimination. In the non-halation area, the average gradient (AG), spatial frequency (SF), edge intensity (EI), gray mean (μ), and edge preservation (QAB/F) are selected for visual effect evaluation.
AG reflects the rate of change of the image detail contrast. The larger the AG, the clearer the non-halation area in the image. SF reflects the change of the image spatial domain, and the larger its value, the more detailed features the image has. EI reflects the amplitude of the image edge gradient, and the larger its value, the more obvious the image edge detail. μ represents the average gray of the image, and the larger its value, the higher the brightness of non-halation areas. QAB/F reflects the degree to which the fusion image maintains the edge of the original image, and the larger its value, the better the edge preservation.
4.1. Experimental Scenes and Parameters
The original visible and infrared images of each scene are shown in
Figure 8. There are six parameters, i.e.,
n,
,
r, [
a,
b], and
σ, that affect the algorithm performance. The description and value of experimental parameters are shown in
Table 1.
4.2. Scene 1: Small Halation of Residential Road
There is weak light scattered by buildings on residential roads at night. When the opposite cars are far away, the halation area formed by the headlights is smaller. In the visible image, the halation is weak, and other information is difficult to observe except the lane lines and vehicle contours illuminated by headlights. In the infrared image, the contours of pedestrians, cars, and buildings are clear.
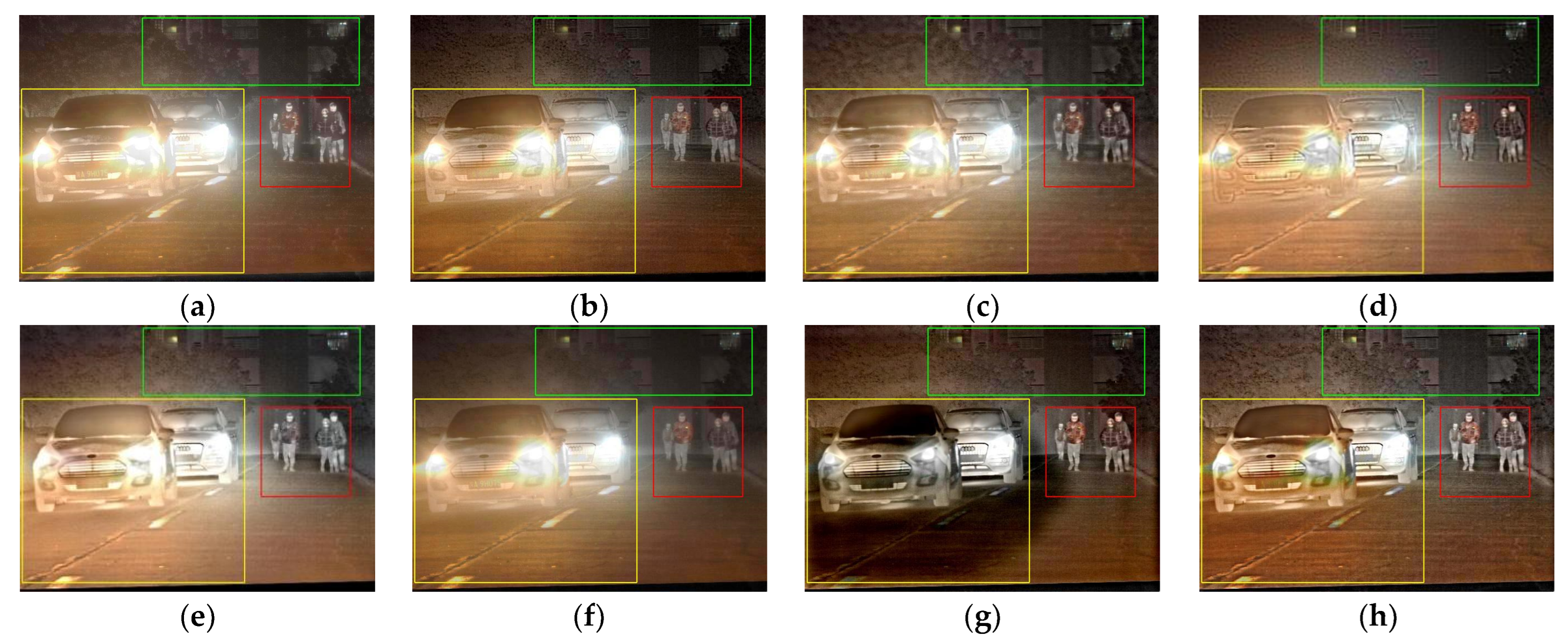
The fusion images of different algorithms in Scene 1 are shown in
Figure 9. Where the yellow-framed, red-framed, and green-framed subregions are high-brightness information, pedestrian, and background, respectively. The zoomed-in images of subregions for different fusion images are shown in
Figure 10. The objective evaluation indexes of the fusion images are shown in
Table 2.
It can be seen from
Figure 9 and
Figure 10 and
Table 2 that the lane lines are highly retained by IGFF, FPDE, TT-CSR, and YUVWT algorithms. However, the halation elimination is incomplete, and the background is relatively dark. The IGFF algorithm effectively improves the saliency of pedestrians, but there is local over-exposure. In FPDE and YUVWT fusion images, the pedestrians are inconspicuous; TT-CSR effectively improves the brightness of the background buildings, but the halation around the vehicles is still obvious.
In contrast, AP-SPCNN, RE-IFS, IIHSDCT, and the proposed algorithm retain the high-brightness lane lines while eliminating the high-brightness halation. Where AP-SPCNN, IIHSDCT, and the proposed algorithm effectively improve the background luminance. However, the contour of pedestrians is blurred by AP-SPCNN, and there are obvious light–dark alternating shadows around the headlights by IIHSDCT, resulting in the loss of local textures and details. RE-IFS enhances the contours of vehicles and pedestrians, but the background brightness is too low.
The overall brightness of the fusion image obtained by the proposed algorithm is good, so μ is the highest. In addition, the pedestrians are remarkable. The reason is that the low-frequency sequence generation model constructed in the paper improves the weight of the brighter image participating in the fusion.
The proposed algorithm can better retain details such as edges, so AG, SF, EI, and QAB/F are higher than that of other algorithms. The reason is that the curvelet transform used in this paper has strong anisotropy, which can better retain detailed features.
Given the above, in Scene 1, compared with the other seven algorithms, the proposed algorithm improves the brightness of pedestrians, roads, and backgrounds effectively and better solves the problem of image acquisition in the low-illumination scene.
4.3. Scene 2: Large Halation of Residential Road
When the oncoming cars are close on the residential road at night, the halation area formed by the headlights is larger. In the visible image, the illumination distribution is uneven, and the halation is dazzling. In addition, some useful information, such as lane lines, that benefit from the halation becomes more obvious. In the infrared image, the contours of vehicles, pedestrians, and buildings are clear, but some important information, such as lane lines, is lost.
The fusion images and the corresponding zoomed-in images of subregions for different algorithms in Scene 2 are shown in
Figure 11 and
Figure 12, respectively. The objective evaluation indexes of the fusion images are shown in
Table 3.
As can be seen from
Figure 11 and
Figure 12 and
Table 3, the lane lines are highly retained by IGFF and YUVWT, but the halation elimination is incomplete. Among them, IGFF improves the brightness of the background and the saliency of pedestrians, but there is an over-exposure phenomenon. The contours of trees and cars are blurred in the YUVWT fusion image, and the background brightness is low.
The halation elimination of the AP-SPCNN, FPDE, and TT-CSR fusion images is insufficient, resulting in the overall brightness being higher. So, μ is high, but DHE is low. The contrast of the image is improved in the AP-SPCNN fusion image, but the contour of the trees is not clear. The texture of cars and pedestrians is clear in the FPDE fusion image, but the background noise is greater, and the smoothness is low. The fused image by TT-CSR has higher background brightness and better visual effect, but the color and textures are missing.
RE-IFS and IIHSDCT completely eliminate the halation. However, after RE-IFS fusion, the background is blurred, and the local details are lost, resulting in poor visual effects. Due to excessive brightness elimination, the parts of lane lines are incorrectly eliminated by IIHSDCT, resulting in a falsely high DHE. At the critical areas of halation and non-halation, the light–dark splitting phenomenon is serious, and the visual effect is poor. In addition, the large-area shadow causes μ to be too low.
In the fusion image obtained by the proposed algorithm, the range of halation elimination is well-controlled, and the overall brightness is moderate. Its DHE is second only to that of IIHSDCT, and other indexes are optimal.
Given the above, in Scene 2, the proposed algorithm reasonably controls the range of halation elimination. The contours of cars and pedestrians are clearer, and the overall visual effect is better. The problem of dazzling halation of low illumination scenes is better solved.
4.4. Scene 3: Large Halation of Urban Trunk Road
There are street lamps and lights from buildings besides headlights on urban trunk roads at night. The driver usually drives with a dipped headlight. When the oncoming car is closer, the halation is more serious in the visible image, but the lane lines and front pedestrians become more significant. In the infrared image, the contours of pedestrians and vehicles are clear, but the information on road conditions is still lacking.
The fusion images and the corresponding zoomed-in images of subregions for different algorithms in Scene 3 are shown in
Figure 13 and
Figure 14, respectively. The objective evaluation indexes of the fusion images are shown in
Table 4.
The effect of halation elimination is poor in IGFF, FPDE, and YUVWT fusion images, resulting in dazzling near the headlights and lower DHE. In the IGFF fusion image, the brightness of the background increases obviously, but the outline of buildings and street lamps is blurred, and the contrast is low. In the YUVWT and FPDE fusion images, the background is dark, and the saliency of pedestrians is low.
Other algorithms have a good effect on halation elimination. However, IIHSDCT eliminates brightness excessively, so DHE is the highest. In addition, the light–dark splitting around the headlights is serious, resulting in local information being obliterated, and the overall brightness is reduced.
In the fusion images of AP-SPCNN, RE-IFS, and TT-CSR, there are still local high-brightness spots around the headlights, and the background of RE-IFS is dark. Compared with RE-IFS, the TT-CSR algorithm can effectively improve the background brightness, but the color of pedestrians and the textures of trees are missing.
Compared with AP-SPCNN, the proposed algorithm can retain the lane lines better, and the fusion image obtained has a higher brightness. μ is moderate and other indexes are optimal.
4.5. Scene 4: Large Halation of Rural Road
The rural roads are narrow and lack lighting equipment. The driver needs to drive with a high beam. In the visible image, it is difficult to observe the dark area. In the infrared images, the contours of pedestrians and vehicles are clear, but the information of road conditions and background are seriously missing.
The fusion images and the corresponding zoomed-in images of subregions for different algorithms in Scene 4 are shown in
Figure 15 and
Figure 16, respectively. The objective evaluation indexes of the fusion images are shown in
Table 5.
AP-PCNN, RE-IFS, TT-CSR, IIHSDCT, and the proposed algorithm have better halation elimination effects. However, the saliency of pedestrians is low, and the edge contour is fuzzy in the AP-PCNN fusion image. The brightness of RE-IFS is low, and the retention of useful information is insufficient. The overall brightness of TT-CSR is higher than that of RE-IFS, but the contours of pedestrians are blurred. IIHSDCT eliminates halation unreasonably, resulting in obvious light–dark splitting and poor visual effects around the headlights. The proposed algorithm retains only a small amount of background information and has optimal indexes, indicating that it can solve the problem of a dark background and missing road details in the halation scene on rural roads effectively.
4.6. Algorithm Complexity Evaluation
The time complexity (T(
n)) and space complexity (S(
n)) are used to evaluate the complexity of different algorithms. The results are shown in
Table 6.
It can be seen from
Table 6 that except YUVWT, T(
n) and S(
n) of other algorithms are the same. However, from the subjective and objective evaluation of the fusion images, the proposed algorithm has higher retention for high-brightness useful information while eliminating the halation. The fusion image obtained by the algorithm in the paper has richer background textures and details and stronger pedestrian saliency. So, the proposed algorithm is more suitable for complex nighttime halation scenes.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}