1.1. Background
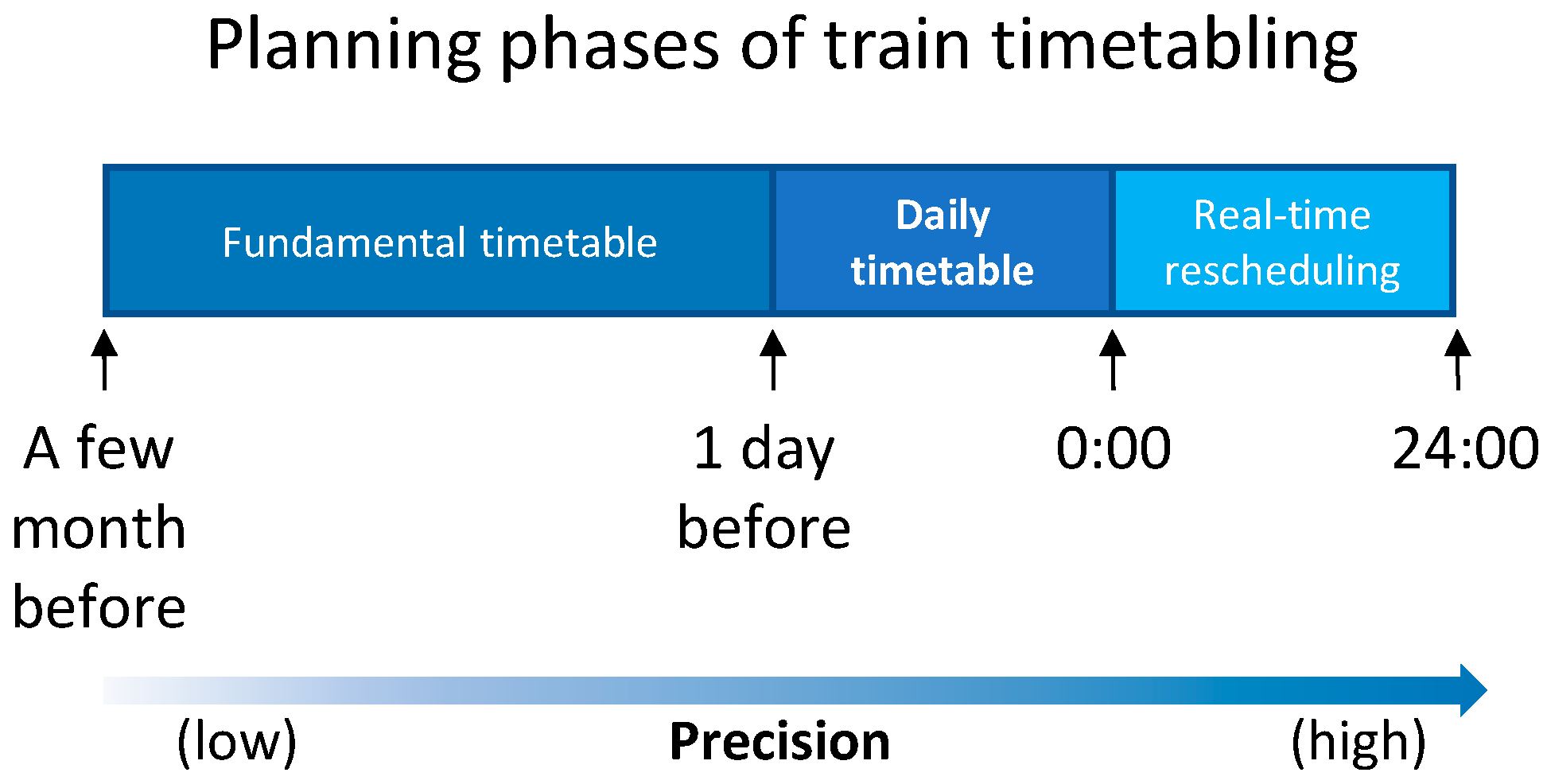
Train timetables specify the arrival and departure times for trains at each station along their route. In most railway transportation systems, railway infrastructure managers generate train timetables in different planning phases for specific purposes. The fundamental timetable is a predefined long-term plan, usually scheduled a few months before execution. However, the timetables executed on certain days might vary from the fundamental timetable, especially in the daily timetable; some trains in the fundamental train timetable are canceled due to the decreasing passenger or freight flow, while some trains are temporally decided to run additionally due to exceptional demand (e.g., increasing passenger flow, extra wagon circulation task). These timetable amendment decisions are made to generate a daily timetable by dispatchers one or a few days before the timetable is executed. Traffic rescheduling focuses on network capacity and the need for the infrastructure manager (IM) to revise the timetable and allocate track resources for the affected trains, in order to minimize delays [
1]. When the timetable is being implemented, train dispatchers monitor the train traffic and make necessary real-time rescheduling decisions to recover the train trajectory (time-space path) of the daily timetable under disturbances. The planning phases of the train timetable are shown in
Figure 1. According to Corman and Meng [
2], train timetables, as tactical plans, are programmed and updated every year or every season (offline) to define routes and schedules of trains. In daily train operations, various sources of perturbations may influence train running times, as well as dwell and departing events, thus causing primary delays to the planned train schedule. In the state-of-the-art of train scheduling, many researchers focus on the real-time train rescheduling approach, which can be referred to as the literature review [
3]. However, in this paper, we study the daily rescheduling before the timetable is implemented.
Among the timetable amendments in daily timetable rescheduling, one essential task is rescheduling the out-of-gauge trains. Typically, the size and shape of the freight being transported by trains are limited to a particular train gauge (the maximum border of the vertical cross-section). The cross-section of train gauge and out-of-gauge train loading can be referred to as UIC loading guidelines [
4]. However, some freights (e.g., oversized machines) are impossible to load on a train within the loading gauges. An out-of-gauge train is a train that exceeds the different levels of standard loading gauges.
Although the out-of-gauge trains exceed the standard loading gauge, they can still be run but with speed and pass-by restrictions, such as:
Out-of-gauge trains should run at a lower speed to avoid possible collisions due to the vibration;
The train pass-by (two trains running on opposite direction tracks meets at segments between two adjacent stations) is forbidden for some types of trains;
The speed reduction of the parallel track is applied when the segment is running an out-of-gauge train;
Station tracks that can accommodate out-of-gauge trains are limited. Therefore, the meeting and overtaking stations of out-of-gauge trains should be carefully decided.
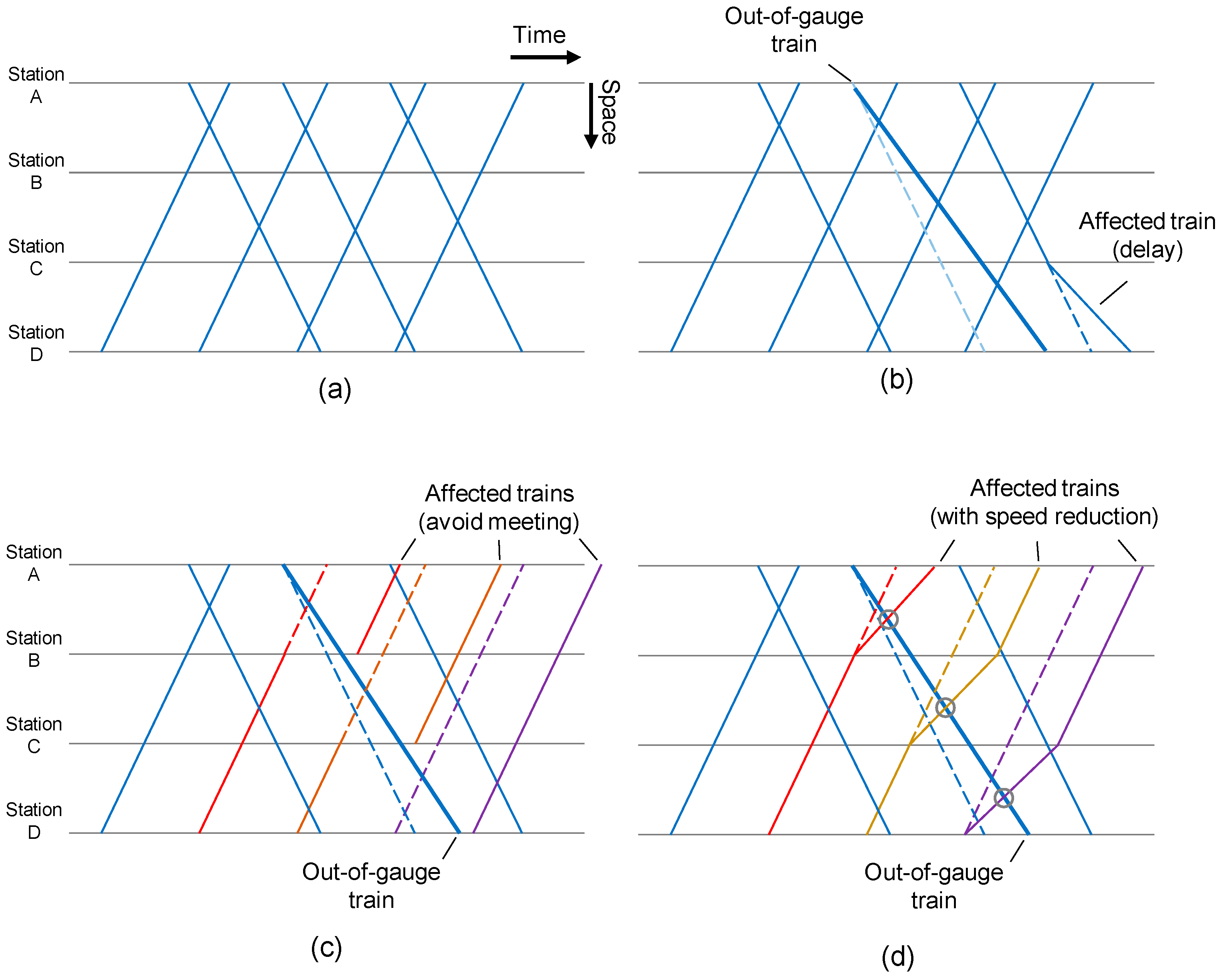
For the reasons above, when a freight train path in the fundamental timetable is decided to run an out-of-gauge train, this train path and the corresponding influenced train paths should be rescheduled. In particular, due to the speed reduction of the out-of-gauge train, trains running in the identical direction might suffer from delay propagation, while trains running in the opposite direction might also be influenced by the out-of-gauge train, due to the pass-by restriction. The impact of the scheduled out-of-gauge trains on the other trains, especially the pass-by restriction to the opposite direction train, makes it a significant challenge to make a daily timetable. Therefore, a fast-rescheduling algorithm would help create a daily timetable from a fundamental timetable, reduce timetable schedulers’ labor intensity, and accelerate the daily timetable publishing procedure.
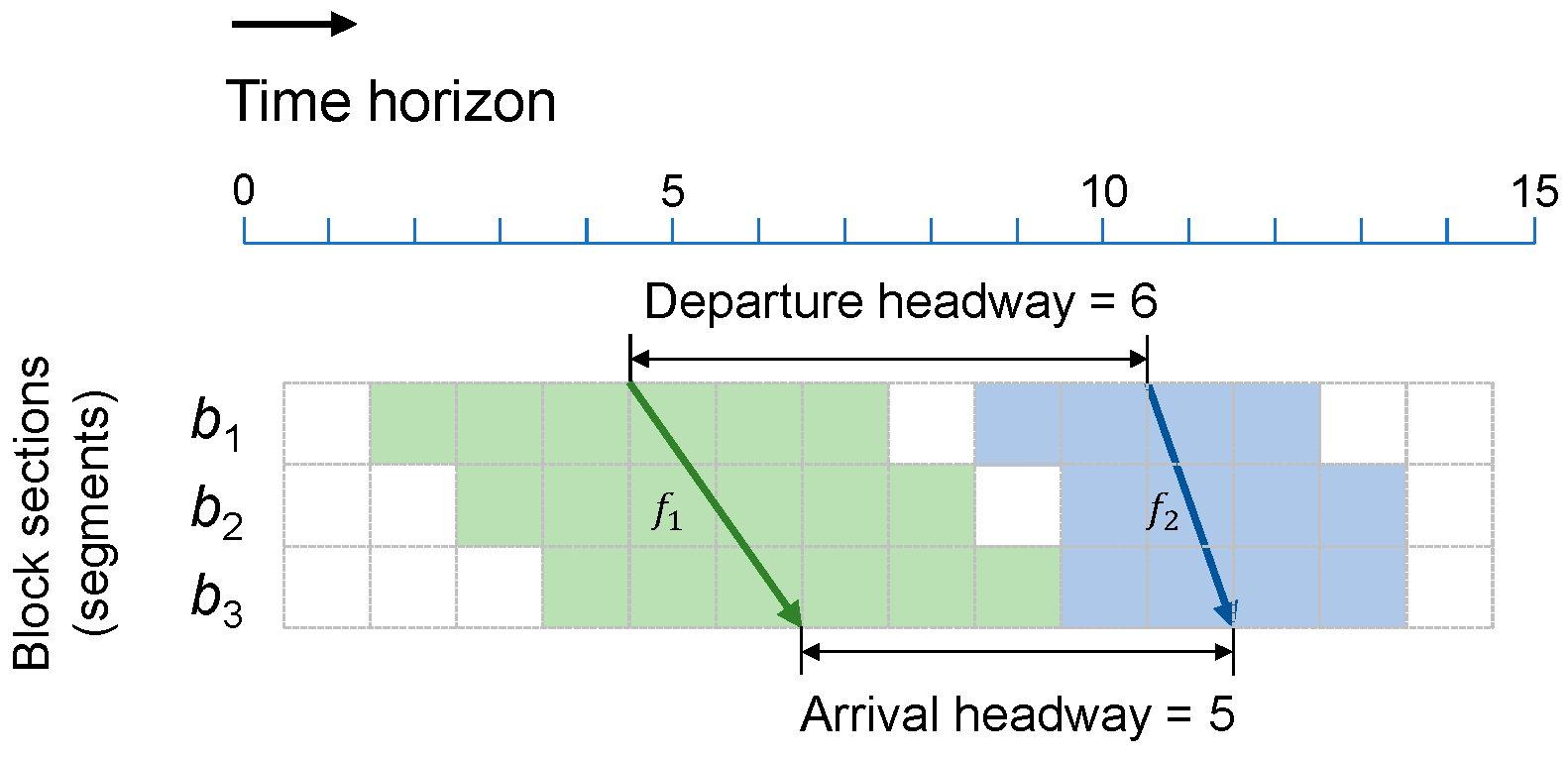
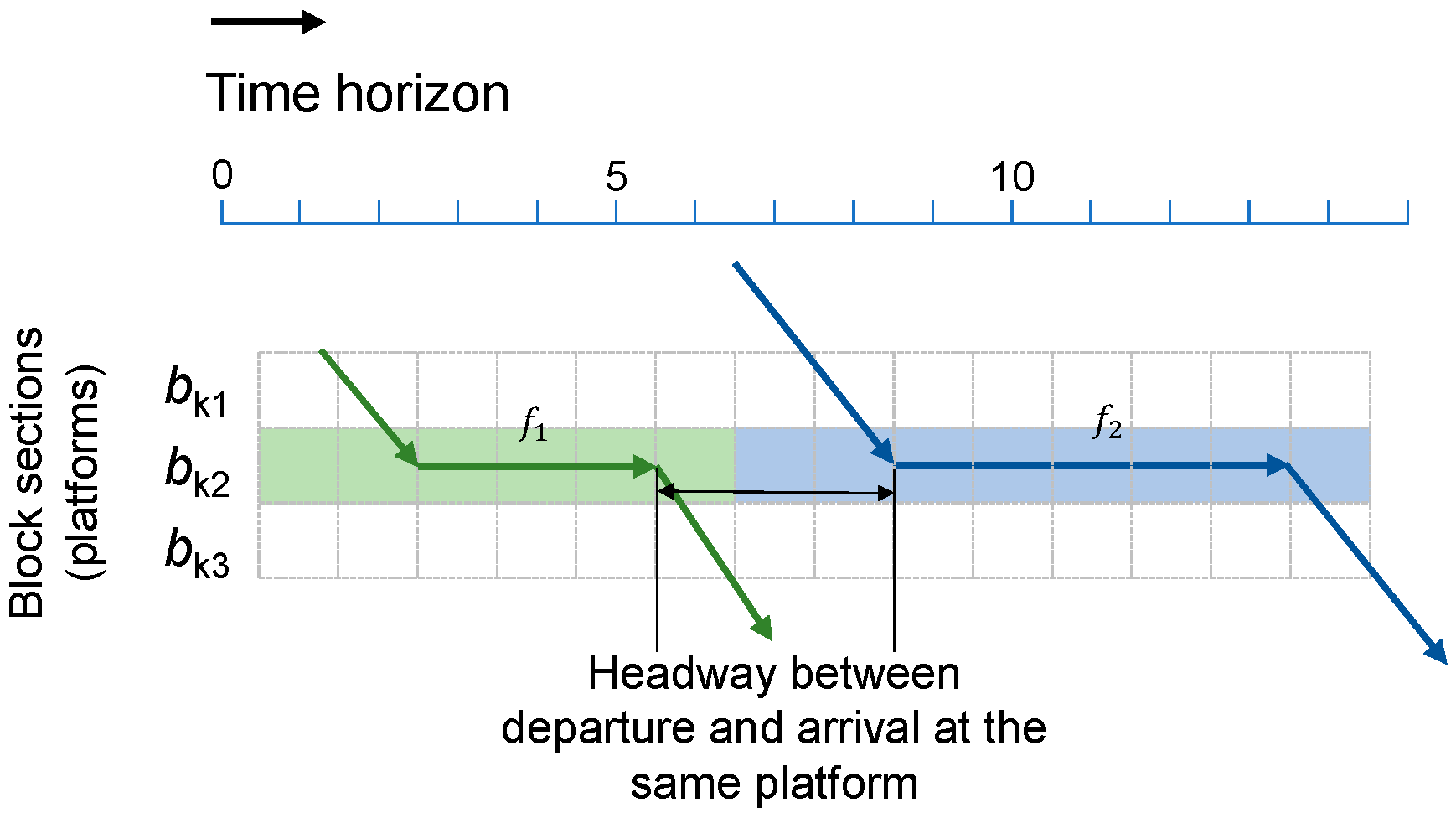
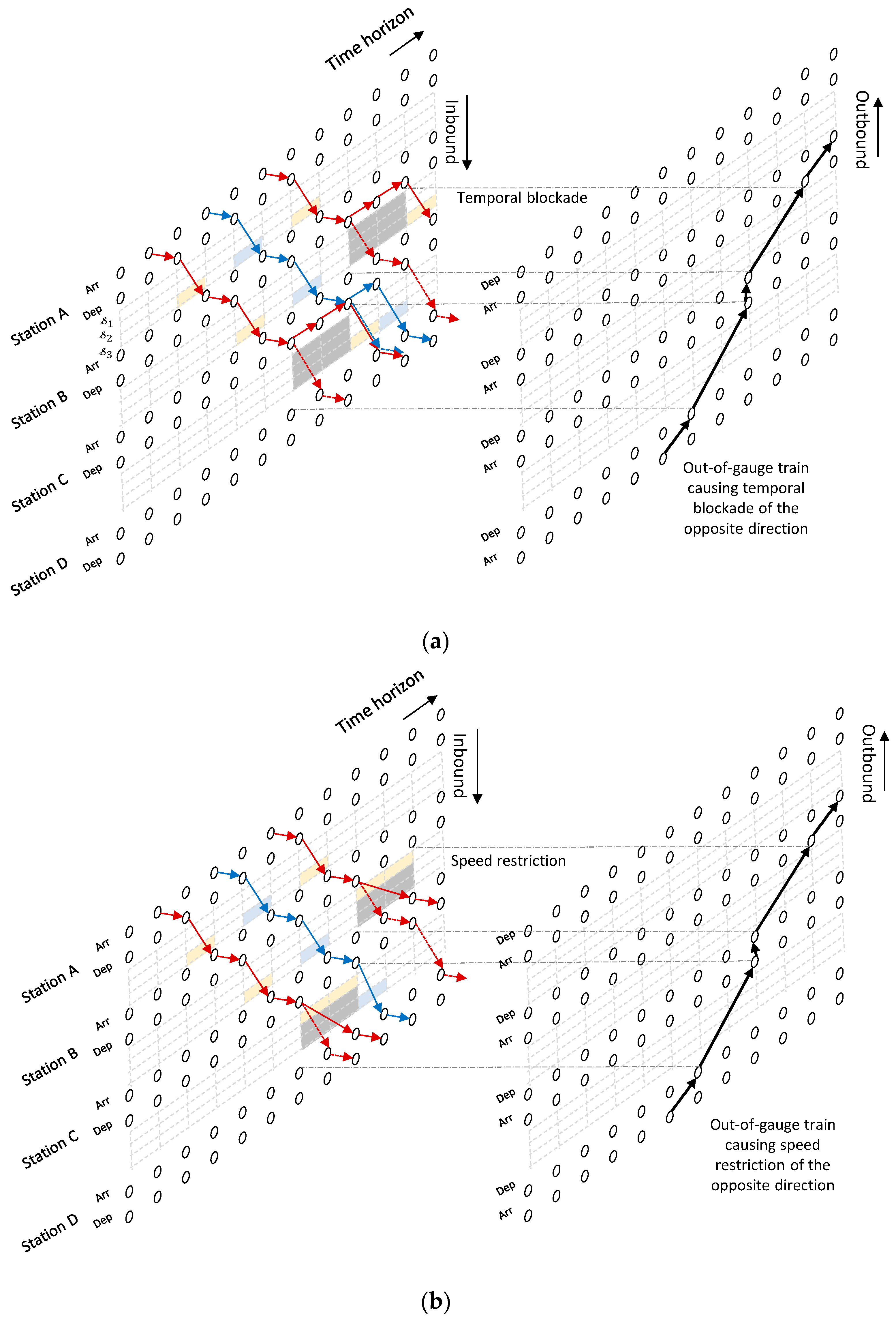
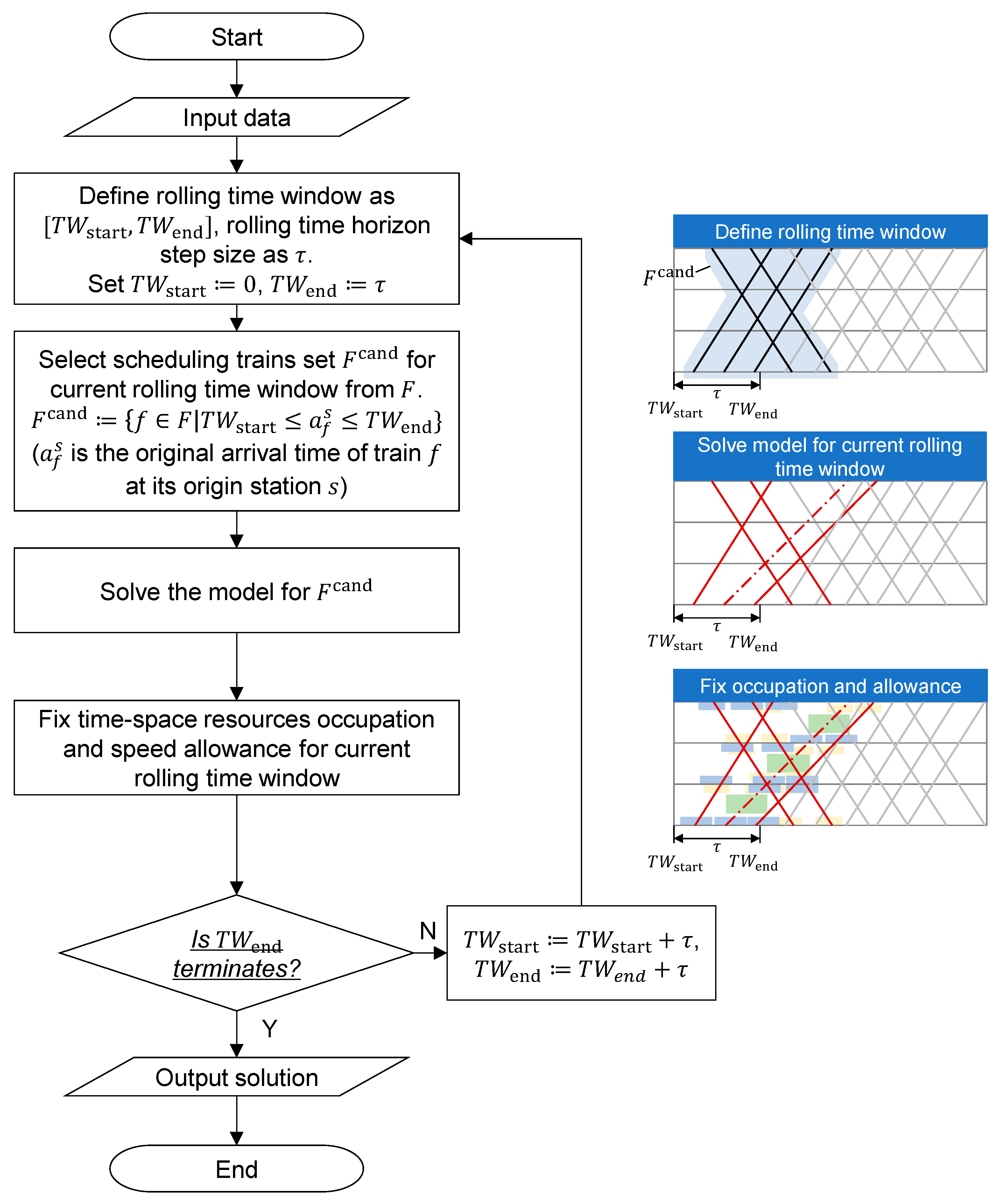
Modeling the train rescheduling problem of out-of-gauge trains is difficult, as the typical minimum headway constraint between two successive trains can hardly describe the complicated pass-by restriction of the out-of-gauge trains. In this paper, we formally define the out-of-gauge train rescheduling problem as creating the daily timetable by minimizing the weighted train delays compared with the fundamental timetable considering the speed restriction and temporal parallel track blockade constraints. Concerning the speed restrictions or track temporal blockades caused by out-of-gauge trains, we propose a novel concept named ‘speed allowance’ based on the time-space network representation of the timetable. This approach can implicitly describe the specific speed restrictions or temporal blockades to the trains running on the parallel opposite direction track caused by the out-of-gauge trains. A network flow-based integer programming model, and an associated rolling time horizon solution method, are applied to solve the out-of-gauge train rescheduling problem. Case studies involving an artificially generated timetable and a case study for a practical timetable are conducted to demonstrate the solution quality, efficiency, and numerical patterns of the timetable with the out-of-gauge trains.
The remainder of this paper is organized as follows.
Section 1.2 is the literature review that summarizes the recent study concerning train rescheduling, especially with speed variation consideration, followed by a contribution statement of this paper in
Section 1.3.
Section 2 analyzes the generic speed restriction regulation and formally defines the train rescheduling problem with speed restriction due to the out-of-gauge trains.
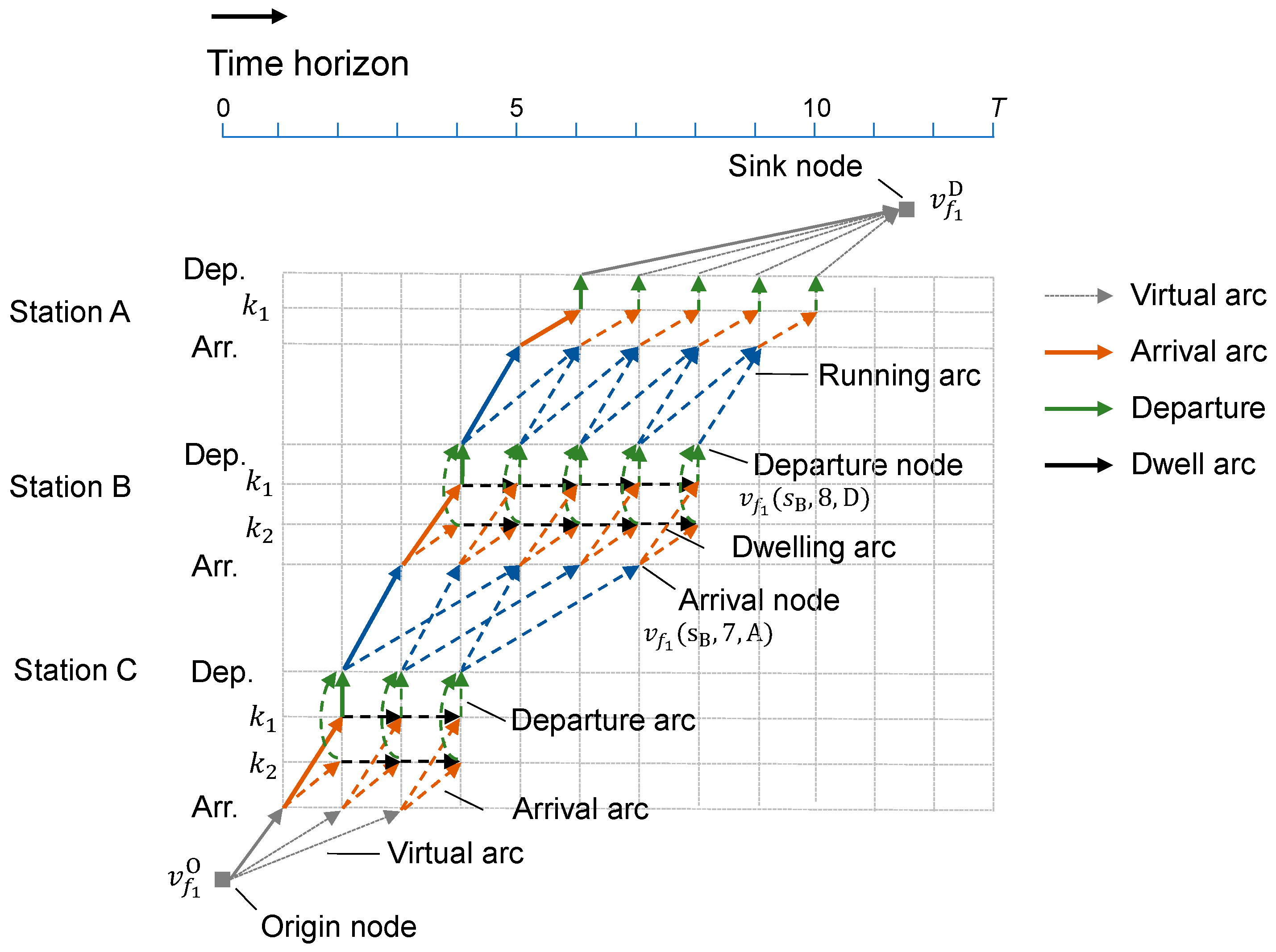
Section 3 proposes a mathematical model and an associated rolling-time horizon algorithm of the train rescheduling problem based on a time-space network representation with ‘speed allowance’ constraints, which describe the speed restriction caused by out-of-gauge trains.
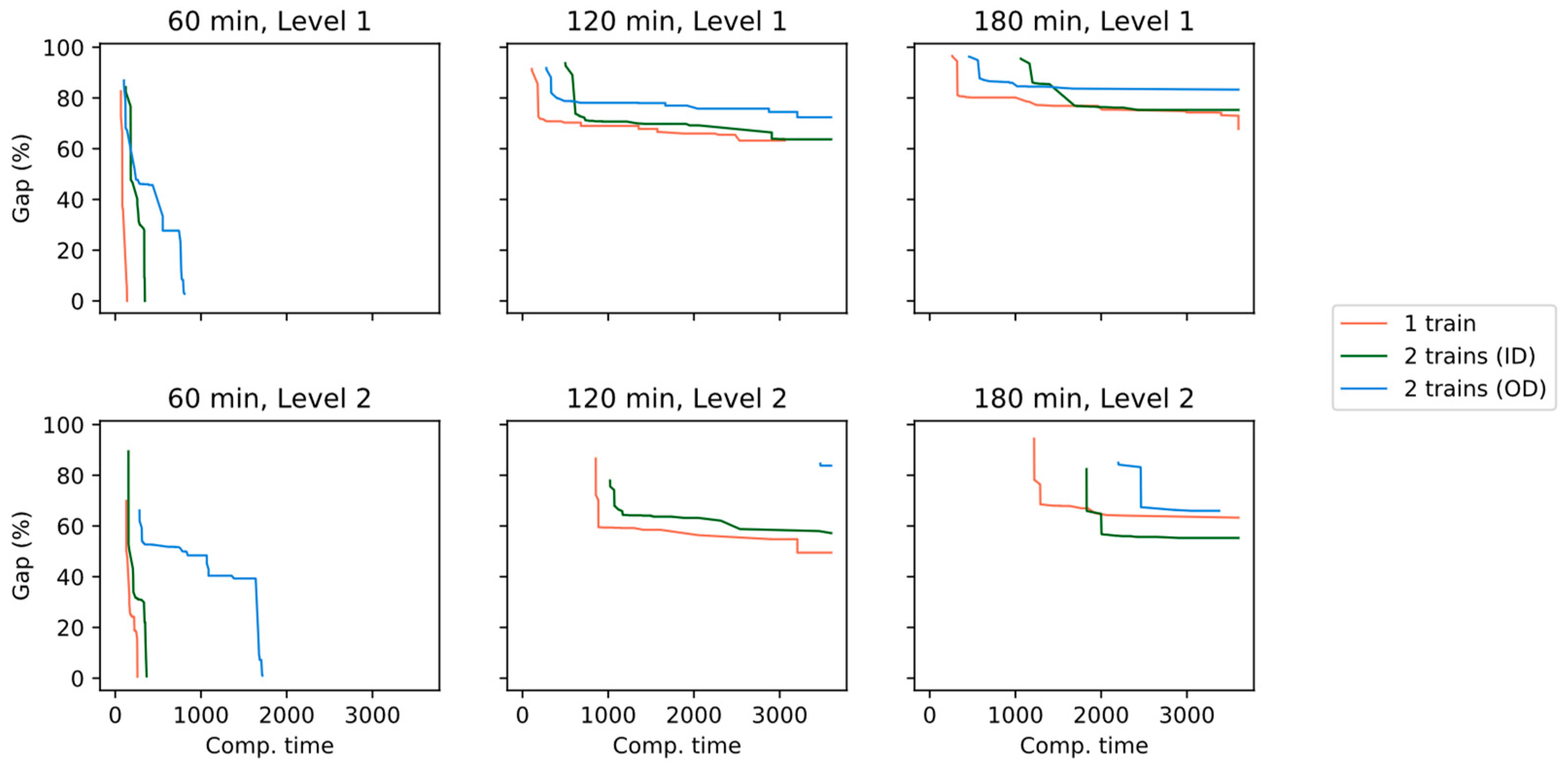
Section 4 provides the case study of rescheduling out-of-gauge trains using the proposed approach to demonstrate the solution efficiency, quality, and performance of the timetable derived from out-of-gauge train rescheduling.
1.2. Literature Review
The train rescheduling problem is widely studied as a discrete combinatorial optimization problem. While the train timetabling problem is considered an offline optimization problem, the train rescheduling problem is often regarded as a real-time decision-making problem. Train rescheduling problem specifies the new arrival and departure times, local or global routes, or new train services under disturbance or disruptions. The recent train rescheduling survey can be referred to as Cacchiani et al. [
3], Wen et al. [
5], and Jusup et al. [
6]. Dong et al. [
7] further concludes that the integration of train rescheduling and train control problem, where the train dynamics are described more thoroughly.
In macroscopic models, the train speed is often modeled as a fixed value or a predefined range. Zhan et al. [
8] applied a space-time-speed network to model the energy-efficient train rescheduling with train trajectory optimization, where the running time of trains are determined by a train trajectory model. Wang et al. [
9] modeled the train optimization of train rescheduling and planned the rolling stock circulation for metro disruption, where the running time is applied as a min and max range. Hong et al. [
10] modeled a train rescheduling problem considering passenger reassignment, where the running time is subject to a given range with minimum and maximum speed. Zhang et al. [
11] specified different minimum and maximum running times according to the speed limit of specified train types. The train running times under disruption are obtained from real-time information instead of being predetermined. Zhan et al. [
12] applied ‘drive arc’ to represent the train running in a segment between two stations. Principally, the drive arcs for a train in a segment are within a limited set, implying that the running time is a predetermined subject to a min-max range. Meng et al. [
13] studied the station track assignment problem under a train rescheduling optimization framework, where the running time is set to be longer than the minimum running time. Josyula et al. [
14] proposed a parallel computing technic for a multi-objective train rescheduling problem, where the train speeds are variables with a speed limitation range. Long et al. [
15] regarded the train running speed in the segment as a variable under temporary speed restriction. The speed restriction is determined by the scenario (i.e., normal and disruption). Hou et al. [
16] proposed an energy-saving metro train timetabling problem considering ATO profiles. The train running time is determined by train operation levels with different train trajectories. Xu et al. [
17] proposed a minimum running-time restriction under a quasi-moving block system. The train running in a blockade segment speed adjustment is taken into consideration. Hong et al. [
18] applied a time-space network to model the variation in train running speeds. Altazin et al. [
19] proposed a rescheduling model for stop-skipping in dense railway systems and an optimization simulation framework. The running time is also regarded as a min-max range. The model describes the resource occupation constraint on the track circuit level. The running times on track circuits are defined within min-max ranges. Cavone et al. [
20] introduced an MPC-based rescheduling algorithm for solving the train rescheduling problem in a cross-granularity manner. The actual train running time is collected at each step, and the rescheduling decision is made based on the updated train running time. The running time is determined in a fine-tuning module where the train running time is calculated considering energy efficiency and robustness. Xie et al. [
21] determined around a 5% to 7% running-time buffer when scheduling trains, and the actual train running time is determined both by energy and passenger factors. Yuan et al. [
22] studied a train timetable, rolling-stock assignment, and short-turning strategy problem. The running time at each segment and dwelling time at each station are predetermined. Liao et al. [
23] modeled the train running time, dependent on the stop-pattern decision. The acceleration and deceleration additional running time is considered. In the studies above, the train running time between two adjacent stations only depends on the technical speed of the train and with no correlation with other scheduled train paths. In other words, the running speeds are regarded as independent variables, and not directly interfered with by other trains.
However, the train running time in segments is impacted by the train speed variation, influenced by the temporal speed restriction due to environmental conditions (e.g., bad weather). Some papers study the train speed variations in the integrated-optimization problem of train rescheduling and maintenance time window arrangement. Luan et al. [
24] first studied the integration of train rescheduling and preventive maintenance time slot planning. The influence of the maintenance time slot on the train path is modeled as a virtual train. Trains are forbidden to have conflicts with the maintenance slots. Zhang et al. [
25] further addressed an improved train rescheduling problem introduced in the Informs RAS problem solving competition 2016 [
26], considering the impact of the maintenance time window on the train running speed. Zhang et al. [
27] applied a layered space-time network to model the joint-train scheduling problem. The impact of maintenance on train running time is modeled as the incompatible nodes. Zhang et al. [
28] applied a Lagrangian relaxation decomposition approach to tackle the train scheduling problem under emergency maintenance. The train running time is restricted to a minimum value if the train runs on the maintenance section, in the opposite direction of the maintaining section, or after corresponding maintenance tasks. Wang et al. [
29] considered the impact of overnight maintenance planning on the overnight train for high-speed railways. The model can optimize both the layout of the overnight maintenance time slot and the train schedules of overnight trains. Zhang et al. [
30] proposed a heuristic procedure dynamically updating the available time windows for each train to solve the train timetabling, platforming, and railway network maintenance scheduling decision problem. During the scheduled infrastructure maintenance duration, the train on the parallel track should run at a lower speed for construction safety reasons. The running time between two adjacent stations is affected by the technical speed and the time-space relationship between the train path and the maintenance time window. If the train path overlaps with the maintenance time window, the speed restriction of the train on the associated segment should be complied with.
The uncertainty factors are commonly considered in train rescheduling models. Peng et al. [
31] studied traffic management optimization under uncertain temporary speed restrictions. Liu et al. [
32] applied an alternating direction method of multipliers (ADMM) combined with the model predictive control (MPC) approach to solve the timetabling and platforming problem in case of uncertain perturbation. Zhang et al. [
33] applied a multistage decision approach for optimizing the train timetable rescheduling under uncertain disruptions. Liebhold et al. [
34] introduced a dynamic onboard tuning method of energy-efficient speed profiles after the real-time train rescheduling process under a fixed block-signaling system for mixed traffic. Gao and Vansteenwegen [
35] proposed a mixed integer linear program to optimize the response to partial blockages, considering the use of reversible tracks.
The characteristic comparison of the literature concerning train scheduling and rescheduling can be referred to in
Table 1.
Concerning the out-of-gauge train operation, Zhang et al. [
36] proposed an optimal route generation method for railway out-of-gauge freight, where safety (i.e., the gap clearance) and economic factors are considered in the optimization model. Based on this model, Zhang et al. [
37] further considered the railway capacity losses and transportation costs, as well as the gauge modification, to generate more comprehensive route decisions. Zhang et al. [
38] investigated the optimal location, length, and the number of non-crossing block sections for out-of-gauge trains to reduce railway capacity loss by applying a cellular automata simulation-based method. Ju et al. [
39] studied the impact factors of the classification of out-of-gauge limits and proposed an associated mathematical model for classifying the gauge limits. In general, the existing research on out-of-gauge operation focuses on the safety aspects (e.g., determining a safe route for the out-of-gauge trains). Some pieces of the literature consider the macroscopic impact (i.e., capacity loss) when running out-of-gauge trains.
However, to our best knowledge, the existing research has not discussed the impact of out-of-gauge trains on its own speed, as well as the related trains. Due to the following characteristics, the problem deserves to be studied. Firstly, the problem is an offline problem; unlike the typical real-time train rescheduling problem, the solution efficiency requirement is relatively low. Thus, more sophisticated solution strategies can be applied. Secondly, the schedule of out-of-gauge trains has leveled and categorized speed restrictions. Unlike the fixed speed restriction under infrastructure maintenance, the out-of-gauge train can select a speed restriction to run among a predetermined set. The candidate speed-restriction schemes impact the trains running on the parallel opposite direction track differently. In general, the out-of-gauge train scheduling problem proposes an interesting topic of balancing the profit between out-of-gauge trains and normal trains by rearranging the departure time, station-track utilization, and overtaking points.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















