

Synchronization of Markov Switching Inertial Neural Networks with Mixed Delays under Aperiodically On-Off Adaptive Control
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The synchronization of Markov switching INNs with mixed delays under aperiodically on–off adaptive control is studied for the first time.
- By using graph theory and the Lyapunov method combined with the differential inequalities technique, some synchronization criteria are derived which are less conservative than those in the existing literature.
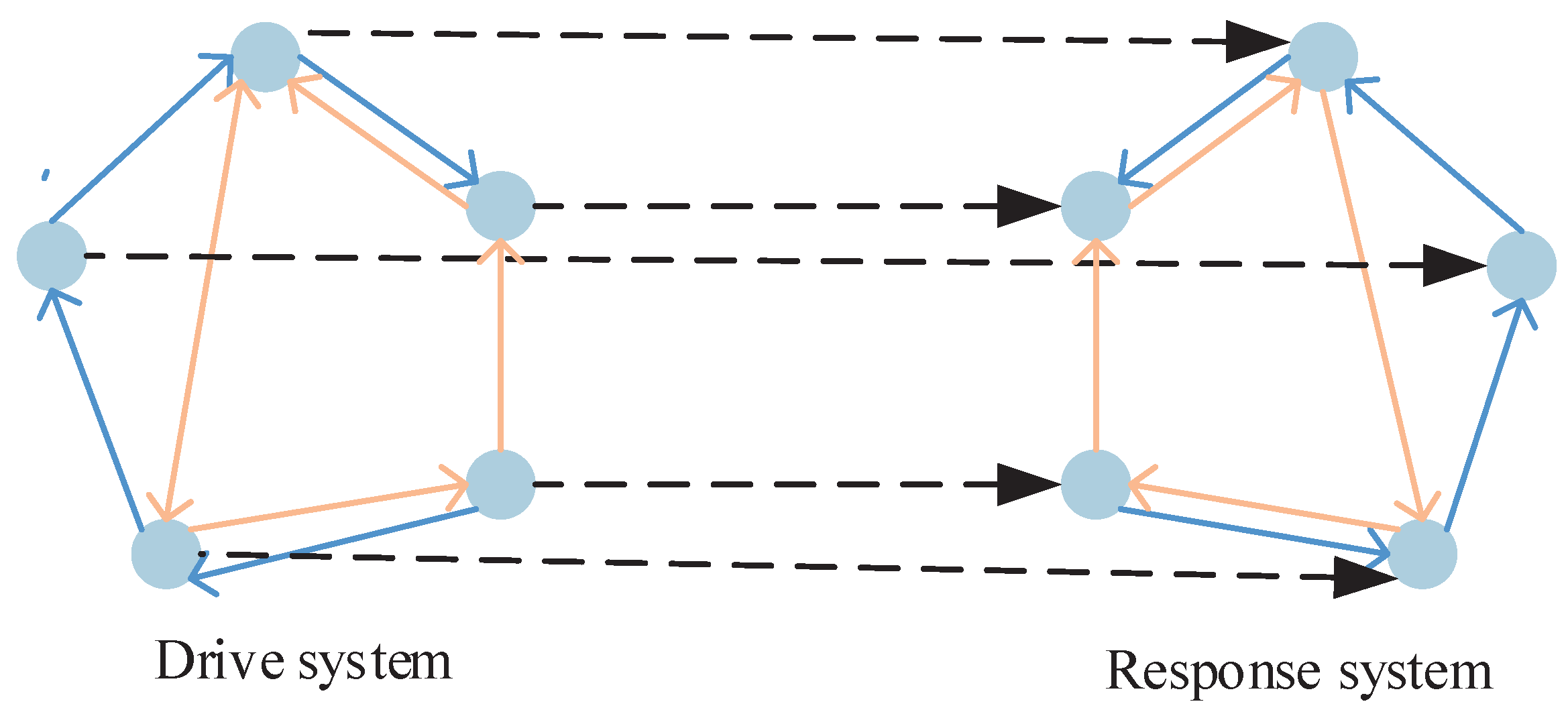
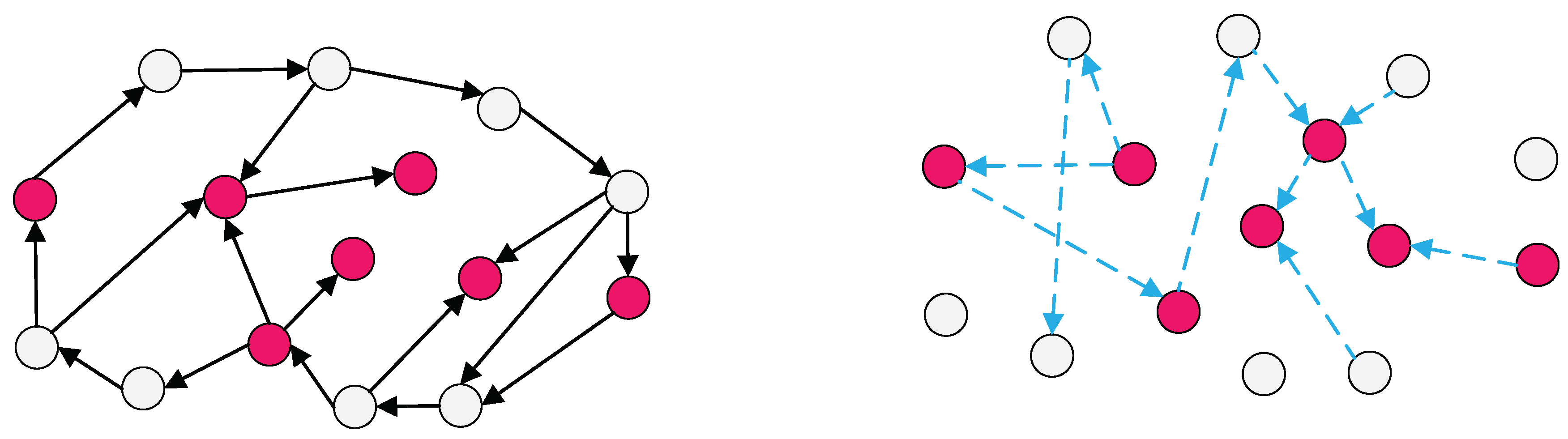
2. Preliminaries and System Models
- is the ith neural state, the second derivative is inertia of system (1);
- denotes the rate at which the ith neuron will resist its potential to the resetting state in isolation when disconnected from the network and external inputs;
- is positive scare;
- stands for the activation function;
- , , are the coupling strengths of the jth vertex to ith vertex if they exist and 0 otherwise.
- is external input
- , is, respectively, discrete delay and distributed delay, which satisfy , , .
3. Main Results
- (s1)
- There are scare , , and such that , .
- (s2)
- , where ς, θ, and are defined in Theorem 2, and is the unique root of . Then, systems (16) and (17) exponentially reach synchronization.
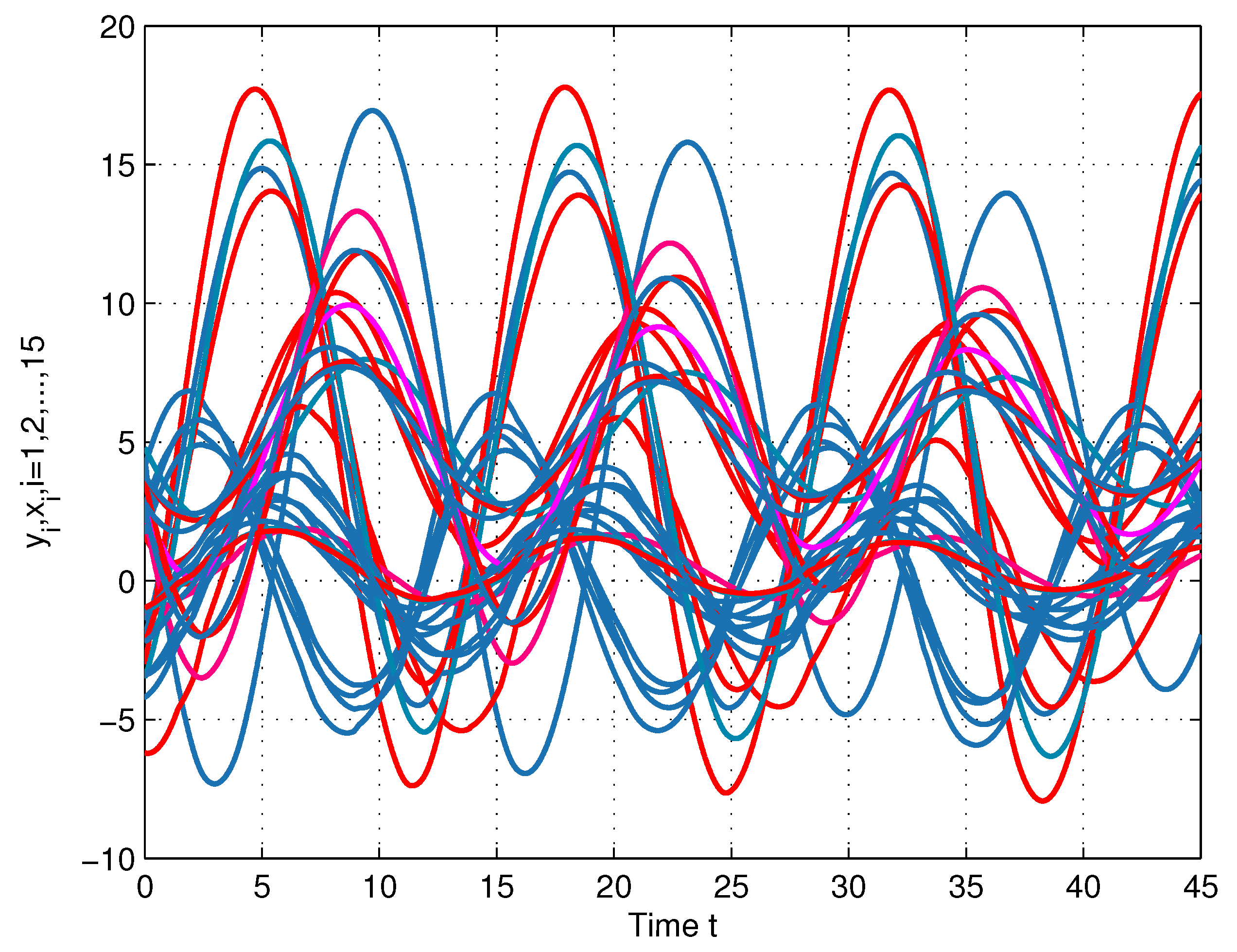
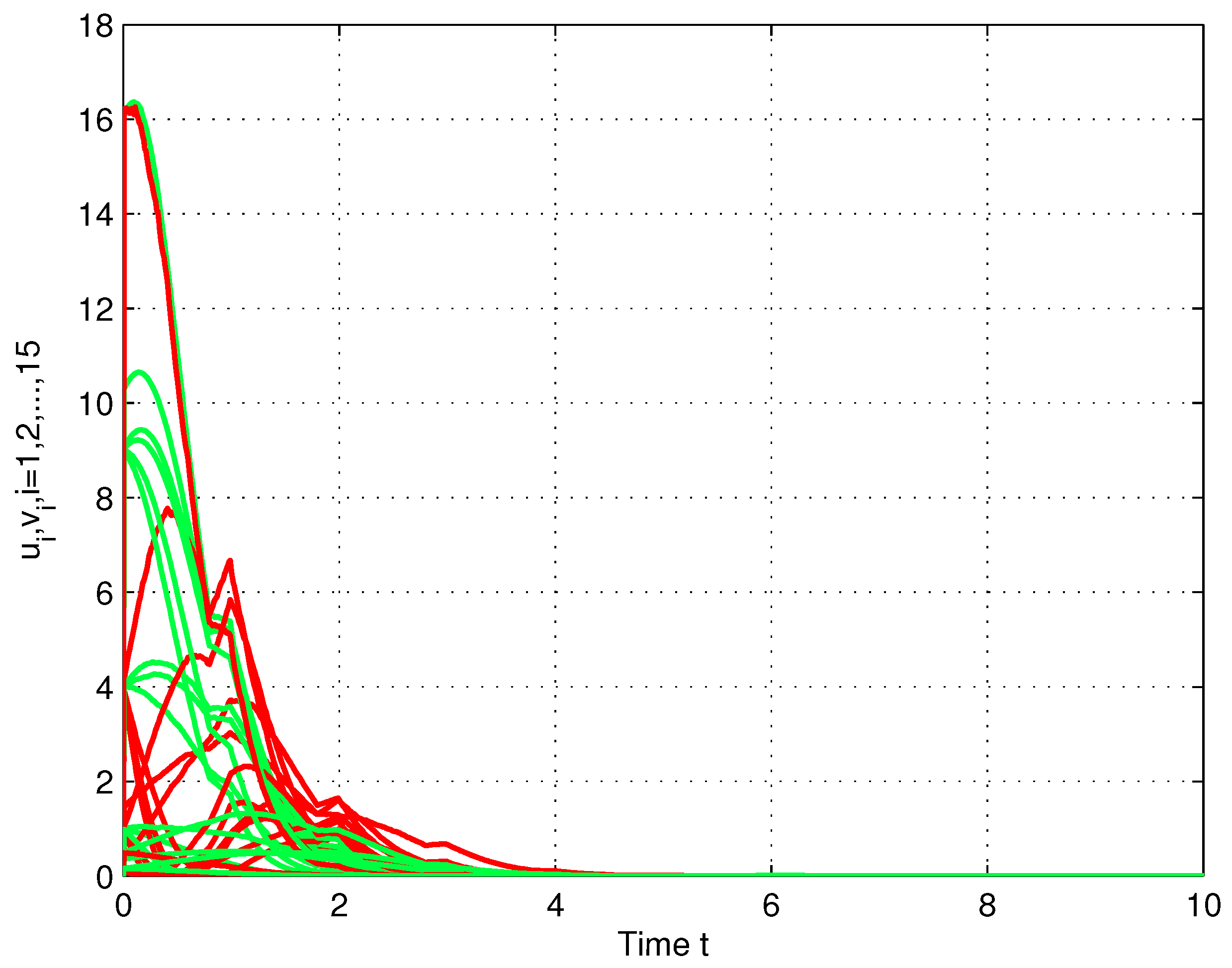
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arbi, A.; Cao, J.; Alsaedi, A. Improved synchronization analysis of competitive neural networks with time-varying delays. Nonlinear Anal. Model. Control. 2018, 23, 82–107. [Google Scholar] [CrossRef]
- Lu, J.; Ho, D.; Cao, J. Exponential synchronization of linearly coupled neural networks with impulsive disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2011, 22, 329–335. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arbi, A.; Tahri, N. New results on time scales of pseudo Weyl almost periodic solution of delayed QVSICNNs. Comput. Appl. Math. 2022, 41, 293. [Google Scholar] [CrossRef]
- Babcock, K.; Westervelt, R. Dynamics of simple electronic neural networks. Physica D 1987, 28, 305–316. [Google Scholar] [CrossRef]
- Angelaki, D.E.; Correia, M.J. Models of membrane resonance in pigeon semicircular canal type II hair cells. Biol. Cybern. 1991, 65, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Koch, C. Cable theory in neurons with active, linearized membrane. Biol. Cybern. 1984, 50, 15–33. [Google Scholar] [CrossRef]
- Arbi, A.; Tahri, N. Almost anti-periodic solution of inertial neural networks model on time scales. In Proceedings of the 2021 International Conference on Physics, Computing and Mathematical (ICPCM2021), Xiamen, China, 29–30 December 2022; MATEC Web of Conferences. Volume 355, p. 02006. [Google Scholar]
- Arbi, A.; Tahri, N. Stability analysis of inertial neural networks: A case of almost anti-periodic environment. Math. Methods Appl. Sci. 2022, 45, 10476–10490. [Google Scholar] [CrossRef]
- Lakshmanan, S.; Prakash, M.; Lim, C.; Rakkiyappan, R.; Balasubramaniam, P.; Nahavandi, S. Synchronization of an inertial neural network with time-varying delays and its application to secure communication. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 195–207. [Google Scholar] [CrossRef]
- Hoppensteadt, F.C.; Izhikevich, E.M. Pattern recognition via synchronization in phase-locked loop neural networks. IEEE Trans. Neural Netw. 2010, 11, 734–738. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, Z.; Feng, J.; Zhao, Y. Global synchronization of nonlinear coupled complex dynamical networks with information exchanges at discrete-time. Neurocomputing 2015, 151, 1486–1494. [Google Scholar] [CrossRef]
- Li, X.; Li, X.T.; Hu, C. Some new results on stability and synchronization for delayed inertial neural networks based on non-reduced order method. Neural Netw. 2017, 96, 91–100. [Google Scholar] [CrossRef]
- Li, X.; Huang, T. Adaptive synchronization for fuzzy inertial complex-valued neural networks with state-dependent coefficients and mixed delays. Fuzzy Sets Syst. 2021, 411, 174–189. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, J. Finite-Time synchronization for fuzzy inertial neural networks by maximum value approach. IEEE Trans. Fuzzy Syst. 2022, 30, 1436–1446. [Google Scholar] [CrossRef]
- Lakshmanan, S.; Prakash, M.; Rakkiyappan, R.; Joo, Y. Adaptive synchronization of reaction-diffusion neural networks and its application to secure communication. IEEE Trans. Cybern. 2020, 50, 911–922. [Google Scholar]
- Wang, Y.; Ding, S.; Li, R. Master-slave synchronization of neural networks via event-triggered dynamic controller. Neurocomputing 2021, 419, 215–223. [Google Scholar] [CrossRef]
- Udhayakumar, K.; Shanmugasundaram, S.; Kashkynbayev, A.; Janani, K.; Rakkiyappan, R. Saturated and asymmetric saturated impulsive control synchronization of coupled delayed inertial neural networks with time-varying delays. Appl. Math. Model. 2023, 113, 528–544. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Z.; Zhou, L. Synchronization of coupled reaction-diffusion neural networks with hybrid coupling via aperiodically intermittent pinning control. J. Frankl. Inst. 2017, 354, 7053–7076. [Google Scholar] [CrossRef]
- Wang, P.; Jin, W.; Su, H. Synchronization of coupled stochastic complex-valued dynamical networks with time-varying delays via aperiodically intermittentadaptive control. Chaos 2018, 28, 043114. [Google Scholar] [CrossRef]
- Wang, P.; Zou, W.; Su, H.; Feng, J. Exponential synchronization of complex-valued delayed coupled systems on networks with aperiodically on-off coupling. Neurocomputing 2019, 369, 155–165. [Google Scholar] [CrossRef]
- Chen, L.; Qiu, C.; Huang, H. Synchronization with on-off coupling: Role of time scales in network dynamics. Phys. Rev. E 2016, 79, 045101. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Shen, Y.; Yin, Q. Synchronization analysis of coupled stochastic neural networks with on-off coupling and time-delay. Neural Process. Lett. 2015, 42, 501–515. [Google Scholar] [CrossRef]
- Li, H.; Fang, J.; Li, X.; Rutkowski, L.; Huang, T. Event-triggered synchronization of multiple discrete-time Markovian jump memristor-based neural networks with mixed mode-dependent delays. IEEE Trans. Circuits Syst. I 2022, 66, 2095–2107. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, X.; Wang, Y. Finite-time stochastic synchronization of fuzzy bi-directional associative memory neural networks with Markovian switching and mixed time delays via intermittent quantized control. AIMS Math. 2023, 8, 4098–4125. [Google Scholar] [CrossRef]
- Chen, C.; Li, L.; Peng, H.; Yang, Y. Fixed-time synchronization of inertial memristor-based neural networks with discrete delay. Neural Netw. 2019, 109, 81–89. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Xiong, X.; Tang, R.; Yang, X. Exponential synchronization of inertial neural networks with mixed delays via quantized pinning control. Neurocomputing 2018, 310, 165–171. [Google Scholar] [CrossRef]
- Prakash, M.; Balasubramaniam, P.; Lakshmanan, S. Synchronization of Markovian jumping inertial neural networks and its applications in image encryption. Neural Netw. 2016, 83, 86–93. [Google Scholar] [CrossRef] [PubMed]
- Tang, Q.; Jian, J. Exponential synchronization of inertial neural networks with mixed time-varying delays via periodically intermittent control. Neurocomputing 2019, 338, 181–190. [Google Scholar] [CrossRef]
- Wan, P.; Sun, D.; Chen, D.; Zhao, M.; Zheng, L. Exponential synchronization of inertial reaction-diffusion coupled neural networks with proportional delay via periodically intermittent control. Neurocomputing 2019, 356, 195–205. [Google Scholar] [CrossRef]
- Li, M.Y.; Shuai, Z. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Feng, J.; Li, Y.; Zhang, Y.; Xu, C. Stabilization of multi-link delayed neutral-type complex networks with jump diffusion via aperiodically intermittent control. Chaos Soliton. Fractal. 2023, 166, 112947. [Google Scholar] [CrossRef]
- Guo, B.; Xiao, Y.; Zhang, C. Graph-theoretic approach to exponential synchronization of coupled systems on networks with mixed time-varying delays. J. Frankl. Inst. 2017, 354, 5067–5090. [Google Scholar] [CrossRef]
- Zhang, T.; Xiong, L. Periodic motion for impulsive fractional functional differential equations with piecewise Caputo derivative. Appl. Math. Lett. 2020, 101, 106072. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, B.; Xiao, Y. Synchronization of Markov Switching Inertial Neural Networks with Mixed Delays under Aperiodically On-Off Adaptive Control. Mathematics 2023, 11, 2906. https://doi.org/10.3390/math11132906
Guo B, Xiao Y. Synchronization of Markov Switching Inertial Neural Networks with Mixed Delays under Aperiodically On-Off Adaptive Control. Mathematics. 2023; 11(13):2906. https://doi.org/10.3390/math11132906
Chicago/Turabian StyleGuo, Beibei, and Yu Xiao. 2023. "Synchronization of Markov Switching Inertial Neural Networks with Mixed Delays under Aperiodically On-Off Adaptive Control" Mathematics 11, no. 13: 2906. https://doi.org/10.3390/math11132906