Abstract
A generalization of the time-delayed Burgers–Fisher equation is studied. This partial differential equation appears in many physical and biological problems describing the interaction between reaction, diffusion, and convection. New travelling wave solutions are obtained. The solutions are derived in a systematic way by applying the multi-reduction method to the symmetry-invariant conservation laws. The translation-invariant conservation law yields a first integral, which is a first-order Chini equation. Under certain conditions on the coefficients of the equation, the Chini type equation obtained can be solved, yielding travelling wave solutions expressed in terms of the Lerch transcendent function. For a special case, the first integral becomes a Riccati equation, whose solutions are given in terms of Bessel functions, and for a special case of the parameters, the solutions are given in terms of exponential, trigonometric, and hyperbolic functions. Furthermore, a complete classification of the zeroth-order local conservation laws is obtained. To the best of our knowledge, our results include new solutions that have not been previously reported in the literature.
Keywords:
time-delayed Burgers-Fisher equations; conservation laws; travelling waves; exact solutions MSC:
35B06; 35C07; 35Q92
1. Introduction
The interaction between convection and diffusion, or reaction and diffusion, describes several nonlinear phenomena including physical, biochemical, and biological processes.
The simplest convection–diffusion partial differential equation (PDE) is the Burgers equation describing wave propagation in dissipative systems [1]. Another important PDE is the Fisher equation. This reaction–diffusion equation was first studied by Fisher, Kolmogorov, Petrovsky, and Piscounov as a model for the transmission of a mutant gene [2,3].
A PDE governing a wide range of these processes is the well-known Burgers–Fisher equation [4],
which describes the interplay of the reaction mechanism, convection effect, and diffusion transport. If , PDE (1) transforms into the Burgers equation; if , PDE (1) becomes the Fisher equation. The Burgers–Fisher Equation (1) has important applications in different fields such as gas dynamics [5] and traffic flow [6], among other problems in mathematical physics.
Later on, a generalized Burgers–Fisher equation was presented,
Both equations have been widely studied. Many works have been conducted to find exact solutions of the generalized Burgers–Fisher Equation (2) by using direct methods [7,8,9,10,11] and by applying nonlinear transformations [12].
Memory effects are an important feature in reaction–diffusion and convection–diffusion systems. If memory effects are considered, i.e., if particle dispersal is not mutually independent, diffusion processes are drastically altered. Therefore, for a given concentration gradient, successive movements of the diffusing particles might be interpreted as a delay in the flow. Recent works have been published including a time delay in this type of systems [13,14,15,16,17].
In real-world applications, it is of interest to consider more general models including a time delay, such as the time-delayed Burgers–Fisher equation
This motivates the study in this paper of the generalized time-delayed Burgers–Fisher equation
where is the time-delayed constant and , are arbitrary functions. Another so-called generalized time-delayed Burgers–Fisher equation is
where s, p, and q are positive constants.
The widespread existence of wave phenomena in biomedical sciences motivates studying travelling waves. Travelling wave solutions were determined for the generalized time-delayed Burgers–Fisher Equation (5) through factorizations [18] and by using the [19] and the first-integral [20] methods. In Ref. [21], travelling wave solutions were studied for PDE (5) with , again by using the method. In Ref. [22], travelling waves were derived for fractional power terms. Nevertheless, as far as we know, there has not been any complete work conducted on travelling wave solutions for the generalized time-delayed Burgers–Fisher Equation (4) with and arbitrary functions.
The aim of this work is to find new classes of travelling wave solutions for the generalized time-delayed Burgers–Fisher Equation (4) in a systematic way by using the symmetry-invariance of conservation laws. This is achieved by applying the multi-reduction method [23]. We also provide a complete classification of zeroth-order conservation laws in order to use the relation between them and symmetries admitted by PDE (4) to find exact solutions for the generalized time-delayed Burgers–Fisher Equation (4).
In Section 2, the multiplier method [24,25] is applied to seek conservation laws. A complete classification of zeroth-order conservation laws is presented. It is worth noting that in this classification problem, no physical or biological considerations have been made to model and .
In Section 3, a second-order ordinary differential equation (ODE) is derived for travelling waves. Then, by applying the multi-reduction theory [23], the translation-invariant conservation law is reduced to a first integral of the travelling wave ODE. The first integral corresponds to a Chini type equation, which can be solved for some particular values of the parameters. Finally, considering special forms for and , Equation (4) becomes an equation of biological interest. This case is discussed and new travelling wave solutions are obtained. Shock wave solutions are also shown and their basic physical feature is described. For , the reduced first-order ODE becomes a Ricatti type equation, which is completely solved.
A general treatment of conservation laws and symmetries for nonlinear PDEs can be found in [26,27,28,29].
All computations have been performed using Maple 2021 software.
2. Conservation Laws
Conservation laws are essential in the analysis of PDEs, providing physical conserved quantities for all solutions. They are also employed for detecting integrability and linearizations, as well as checking numerical solution methods’ accuracy.
For further details on multipliers, conservation laws, and their applications to PDEs, see Refs. [28,29].
A conservation law of the generalized time-delayed Burgers–Fisher Equation (4) is a continuity equation
which holds for all solutions , with and denoting total derivatives. Here, T represents the conserved density and the spatial flux, which are functions of t, x, u, and u derivatives. A conserved current is the pair .
If and are satisfied for all solutions, with a function of t, x, u, and u derivatives, then the continuity equation holds identically, and such conservation law is called trivial (it provides no interesting information about solutions). Two conservation laws are said to be locally equivalent if they differ by a trivial conservation law. Hence, only nontrivial conservation laws (up to local equivalence) are of interest.
On the space of solutions , the integral of a nontrivial conservation law over the spatial domain yields a conserved integral
satisfying
This states that the rate of change of the density integral on (7) is equal to the negative of the net spatial flux passing through the boundary points as measured by the flux integral. Under suitable boundary conditions, the net flux vanishes, and the conserved integral C is time-independent.
Any local conservation law has an equivalent characteristic form, given by a divergence identity
holding for the solutions of the generalized time-delayed Burgers–Fisher Equation (4), where and are, respectively, a conserved density and a spatial flux locally equivalent to T and , and Q is a function of t, x, u, and u derivatives, called a multiplier.
Multipliers are extremely important since conservation laws (up to local equivalence) and multipliers have a one-to-one correspondence. All nontrivial conservation laws are derived from multipliers [28,29].
A determining equation for multipliers is given by applying the Euler operator with respect to u to the divergence expression (9),
holding identically for all and not only for solutions of Equation (4). Equation (10) splits with respect to the u derivatives not appearing in Q, yielding an overdetermined linear system for Q.
Conservation laws for basic physical quantities such as energy and momentum arise from multipliers of lower order than the order of the equation [29]. A classification of all low-order conservation laws is, in principle, possible by the multiplier method [24,25]. However, in the present problem, we seek zeroth-order multipliers of the form . It is straightforward to solve the full system using Maple software, leading to the following result.
Proposition 1.
The generalized time-delayed Burgers–Fisher Equation (4), with and arbitrary functions satisfying and , admits only a zeroth-order multiplier
Additional zeroth-order multipliers are admitted in the following cases.
- (i)
- For , with , arbitrary constants, and arbitrary function,
- (ii)
- For nonlinear function and , with , arbitrary constants,
- (iii)
- For nonlinear function and ,
with F an arbitrary function of its argument.
The use of any of the methods described in Ref. [29] yields the conserved currents coming from these multipliers.
Theorem 1.
For the generalized time-delayed Burgers–Fisher Equation (4), with and arbitrary functions satisfying , , the admitted local conservation law is
Additional zeroth-order local conservation laws are admitted in the following cases.
- (i)
- For , with , arbitrary constants, and arbitrary function,
- (ii)
- For nonlinear function and , with , arbitrary constants,
- (iii)
- For nonlinear function and ,
with F an arbitrary function of its argument.
3. Travelling Waves
A travelling wave is defined by
where c is the constant speed of the wave. This expression results from a group invariance with respect to the translation symmetry
with and being the invariants.
The substitution of the travelling wave expression (19) into the generalized time-delayed Burgers–Fisher Equation (4) yields a second-order nonlinear ODE for ,
Here, a prime denotes a differentiation with respect to .
It is known that any translation-invariant conservation law reduces to a first integral of the travelling wave ODE [23]. This first integral has the form
where is the conserved current.
Let us now focus on the case from Theorem 1 with the translation-invariant conservation law (17). For this case, must satisfy
The associated conserved current (17) yields a first integral of ODE (21). The resulting first integral is given by
where is an arbitrary constant and . Now, two cases are distinguished: and .
3.1. For
The first-order ODE (24) is a Bernoulli equation, and each solution can be implicitly given by the quadrature
where is an arbitrary constant, and can be set to 0 by translation invariance.
3.2. For
The first-order ODE (24) is a Chini type equation. As far as we know, there is no general solution known for this type of equation. However, a family of these equations appearing in Ref. [30] as I-55 can be solved. In order for ODE (24) to belong to this Chini family, must satisfy
where and are arbitrary constants. Thus, the first-order ODE (24) becomes
Following Ref. [30] (p. 303), in order for ODE (27) to be solved, there should exist two constants and such that
is satisfied. Consequently,
must be verified. Therefore, the local change for the dependent variable given by
transforms Equation (27) into the first-order separable ODE
or, equivalently,
where is an integration constant. The solution of Equation (31) or (32) is given by
where L represents the Lerch transcendent function [31].
4. Equations of Biological Interest: Exact Solutions
For and , with s, p, and q positive parameters, Equation (4) becomes an equation of biological interest. These types of functions are considered because they introduce both the features of convective phenomena from the Burgers equation and the diffusion transport as well as reaction from the Fisher equation.
For these special forms of and , the generalized time-delayed Burgers–Fisher Equation (4) is written as
The first integral (24) becomes
where is a constant, and c must satisfy
This relation for the speed of the wave comes from holding the previous condition (23) for these special forms of and . It is clear from the previous relation (36) that the soliton’s velocity is affected by the time-delayed constant . As the time-delayed constant increases, the speed of the wave decreases.
In the particular case in which the time delay is not considered, i.e., , this first integral (35) coincides with the first integral appearing in Ref. [32], and (36) coincides with the condition appearing in [10,11] for the existence of travelling wave solutions for PDE (34).
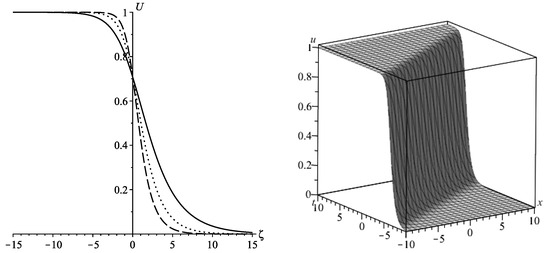
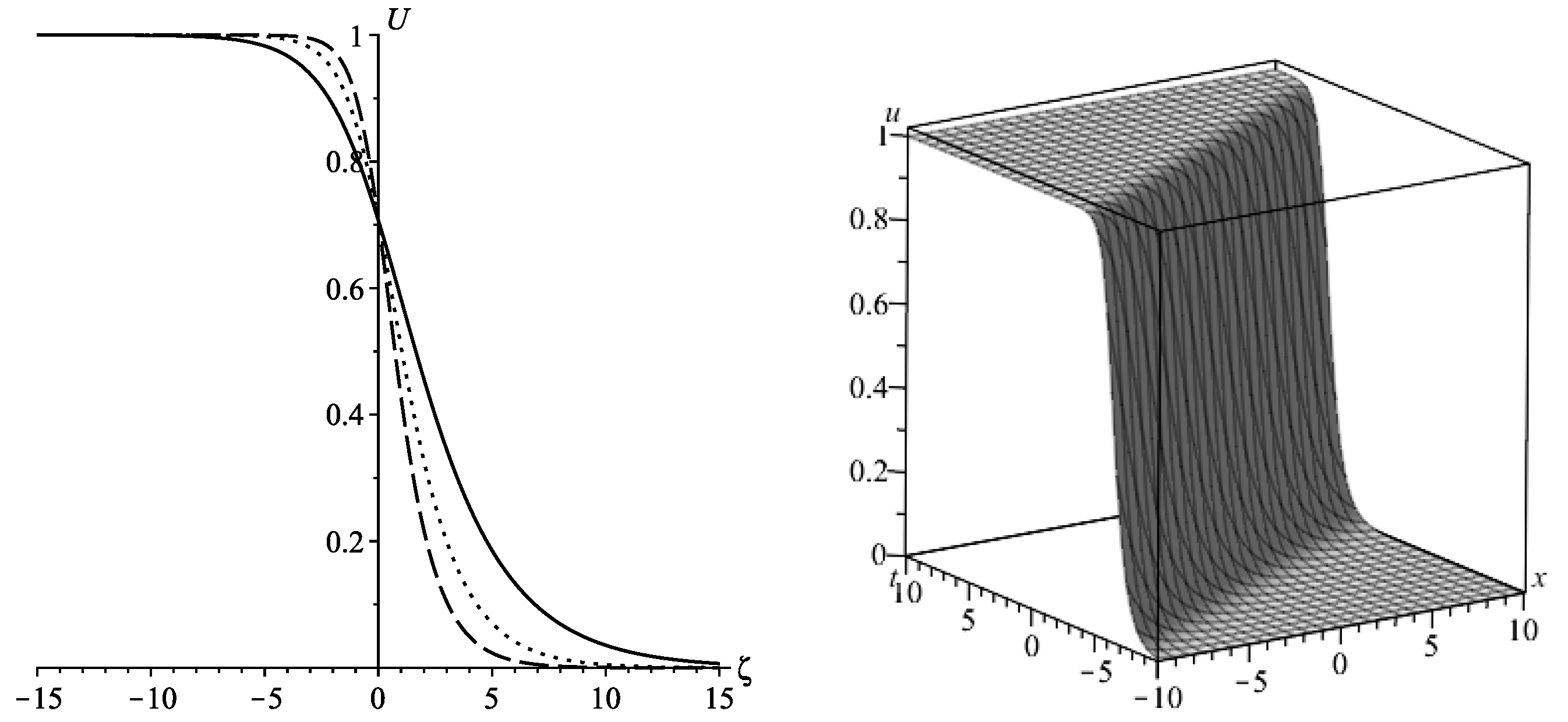
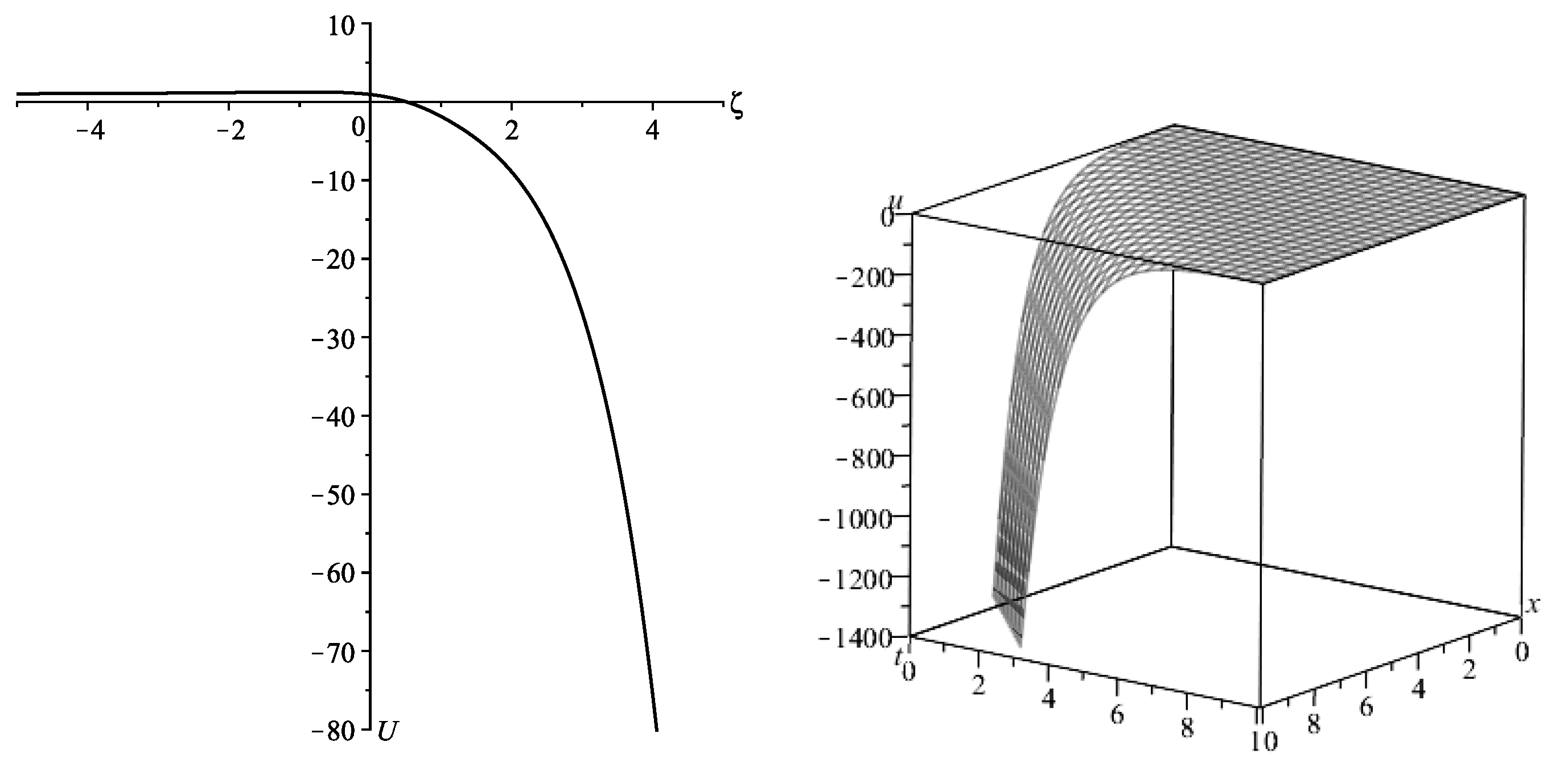
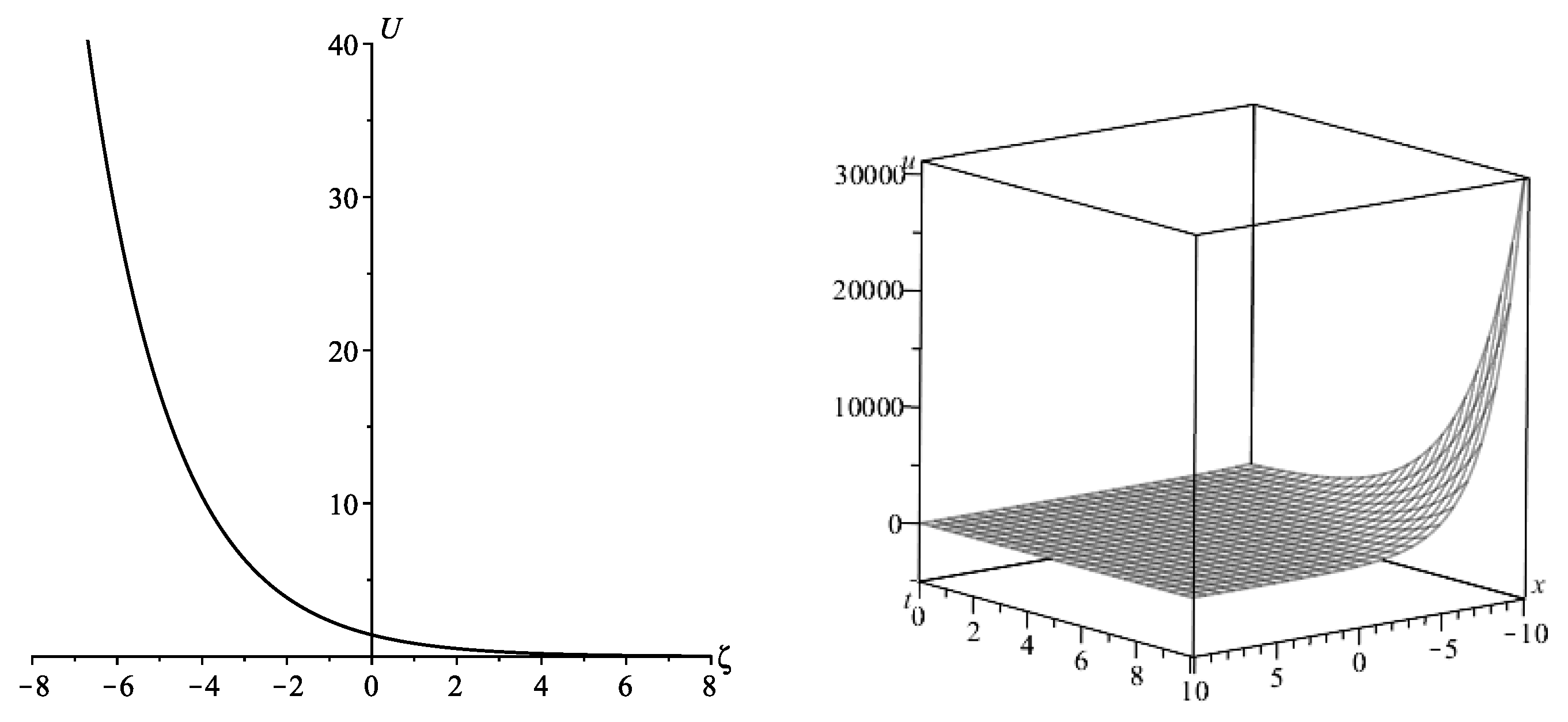
Setting , the first-order ODE (35) is obviously a Bernoulli equation. It is straightforward to solve it, explicitly obtaining a solution for ,
where is an integration constant. This solution has already been obtained using a factorization technique [18] and a first-integral method [20].
Physically, this solution describes a bright kink soliton (shock wave) solution. This type of solution is distinguished by the feature that the wave amplitude transitions exponentially between two asymptotically constant values. These waves are characterized by an almost vertical front. Figure 1 (left) shows a plot of the shock wave profile for different values of . The effect of the time delay is to smooth the shock wave nature of the shock wave solution. The wave leads to a less smooth behaviour with a larger slope when the time-delayed constant increases. Figure 1 (right) shows a space-time plot of the shock wave front.
For s = 1
This model describes a density-dependent diffusion with a logistically growing population [33].
The first integral (35) becomes
which is of Ricatti type.
The transformation
where
maps ODE (38) into the linear second-order ODE
Setting
ODE (41) can be rewritten as
Then, setting , this ODE can be again rewritten as
It is straightforwardly solved, giving its general solution in terms of Bessel [34] or elementary functions.
- (i)
- For :
- •
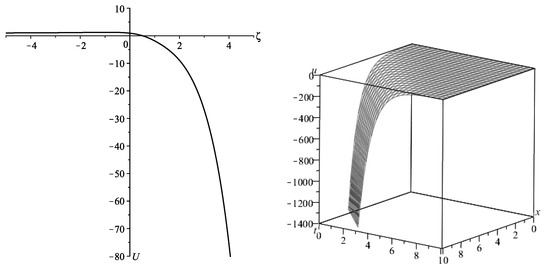
- If , the general solution to ODE (44) isHence, the solution to ODE (38) iswhere I and K denote the modified Bessel functions of first and second kind, respectively, and and are integration constants.Figure 2 shows a solitary wave solution given in terms of modified Bessel functions, decaying from an asymptotically constant value.
- •
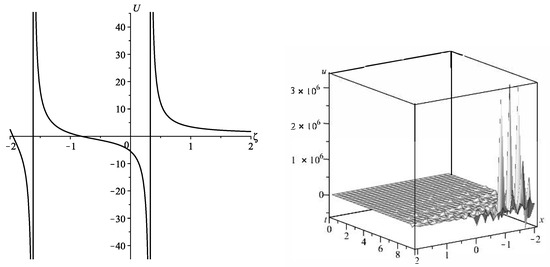
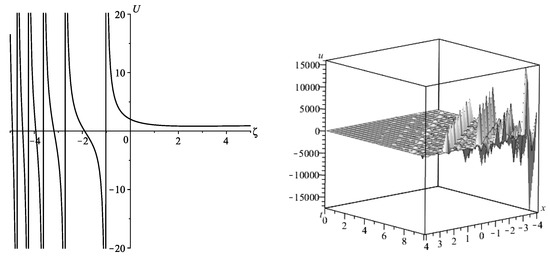
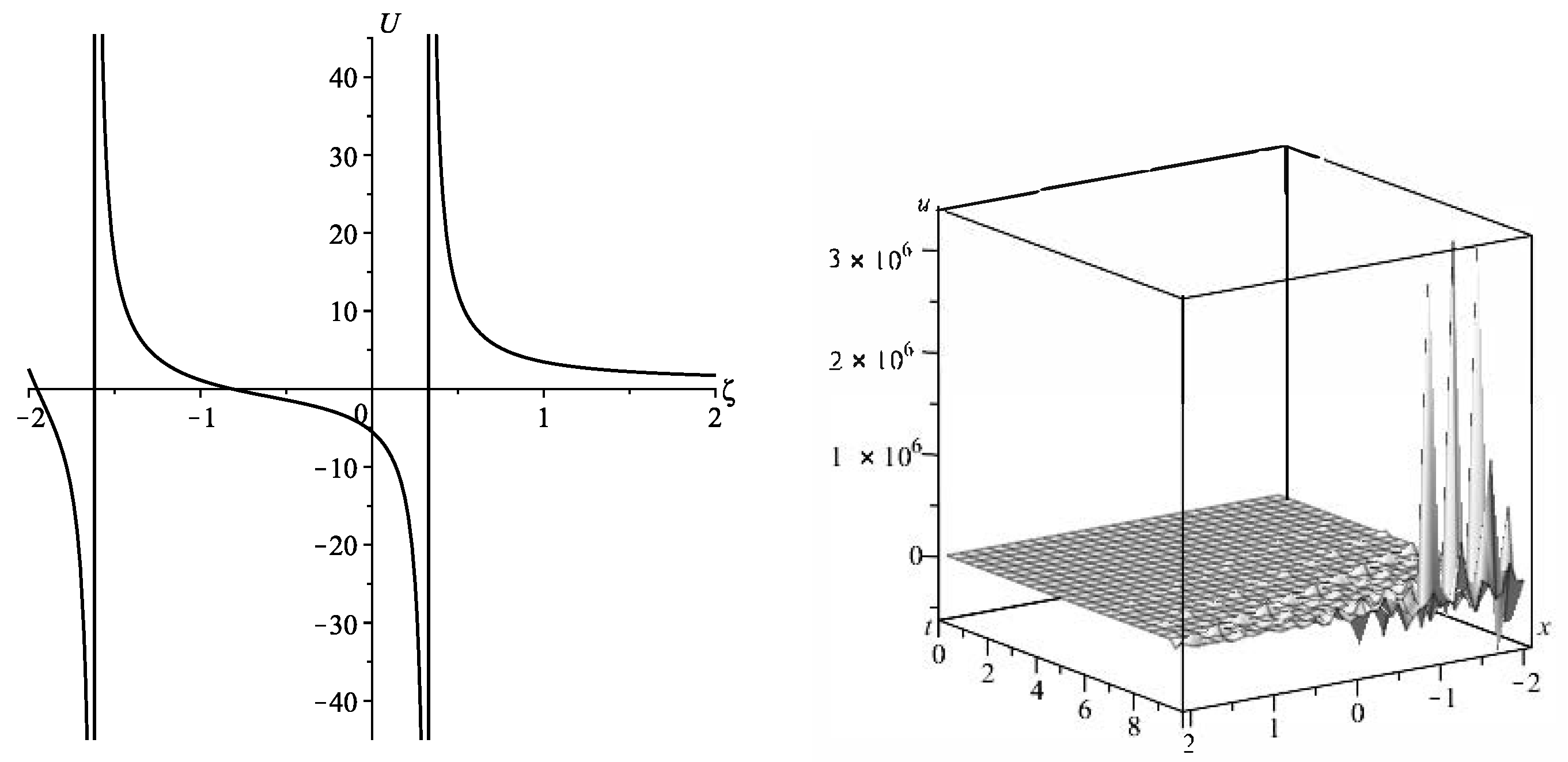
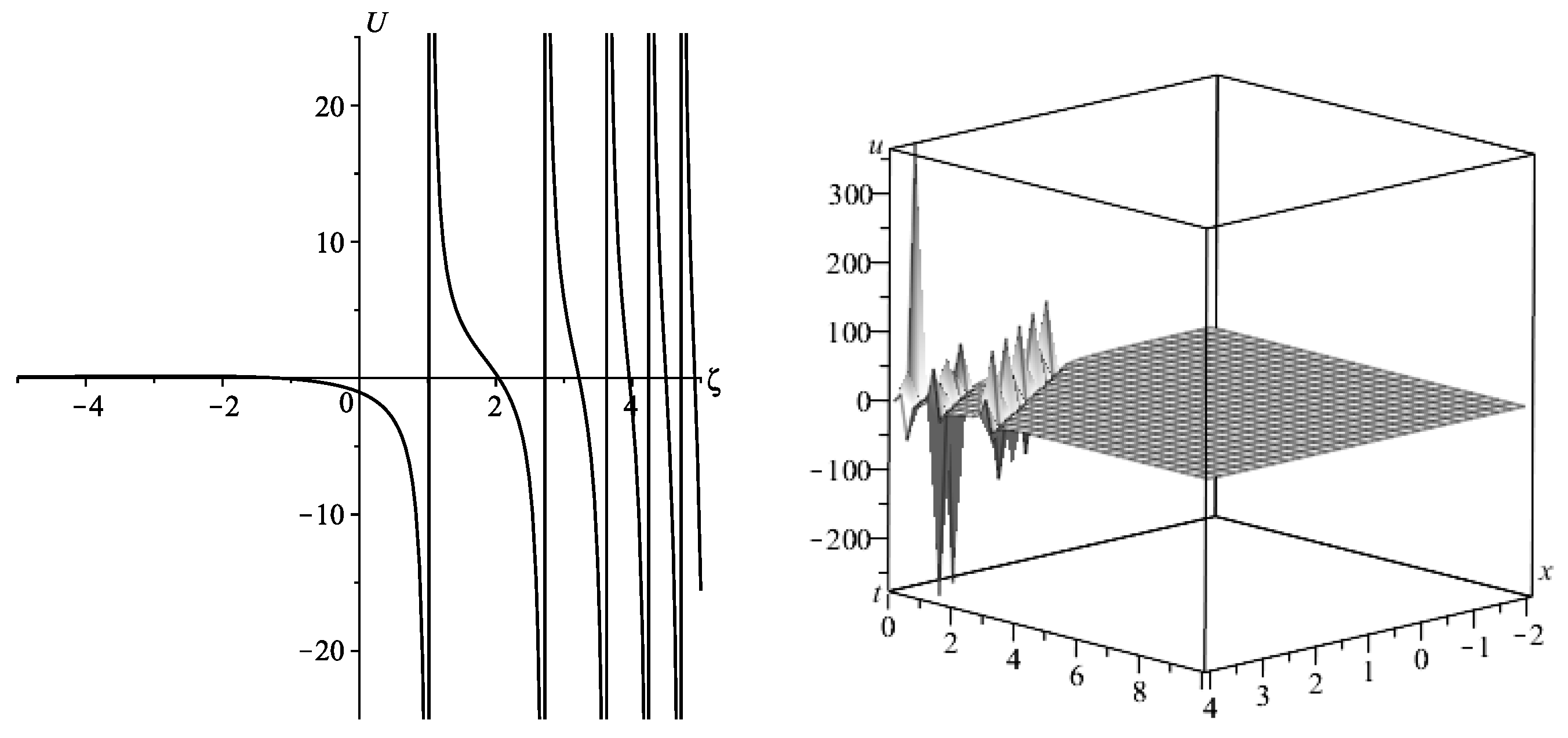
- If , the general solution to ODE (44) isHence, the solution to ODE (38) iswhere J and Y denote the Bessel functions of first and second kind, respectively, and and are integration constants.Figure 3 represents a solution given in terms of ordinary Bessel functions. This solution becomes a singular solution if the denominator is equal to zero. Thus, depending on the choice of the parameters, it leads to a singular solution. The solution behaves as a rogue wave holding elevation peaks and deep humps.
- (ii)
- For :
- •
- If and , the general solution to ODE (44) isHence, the solution to ODE (38) iswhere are are integration constants.
- •
- If and , the general solution to ODE (44) isHence, the solution to ODE (38) iswhere and are integration constants.
- •
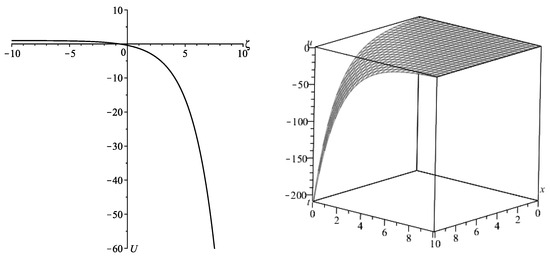
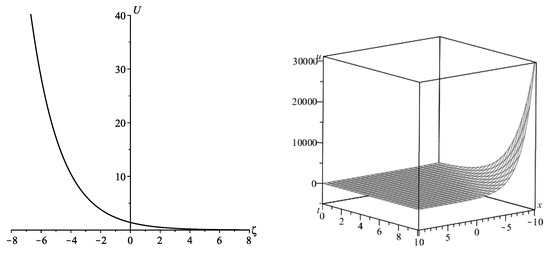
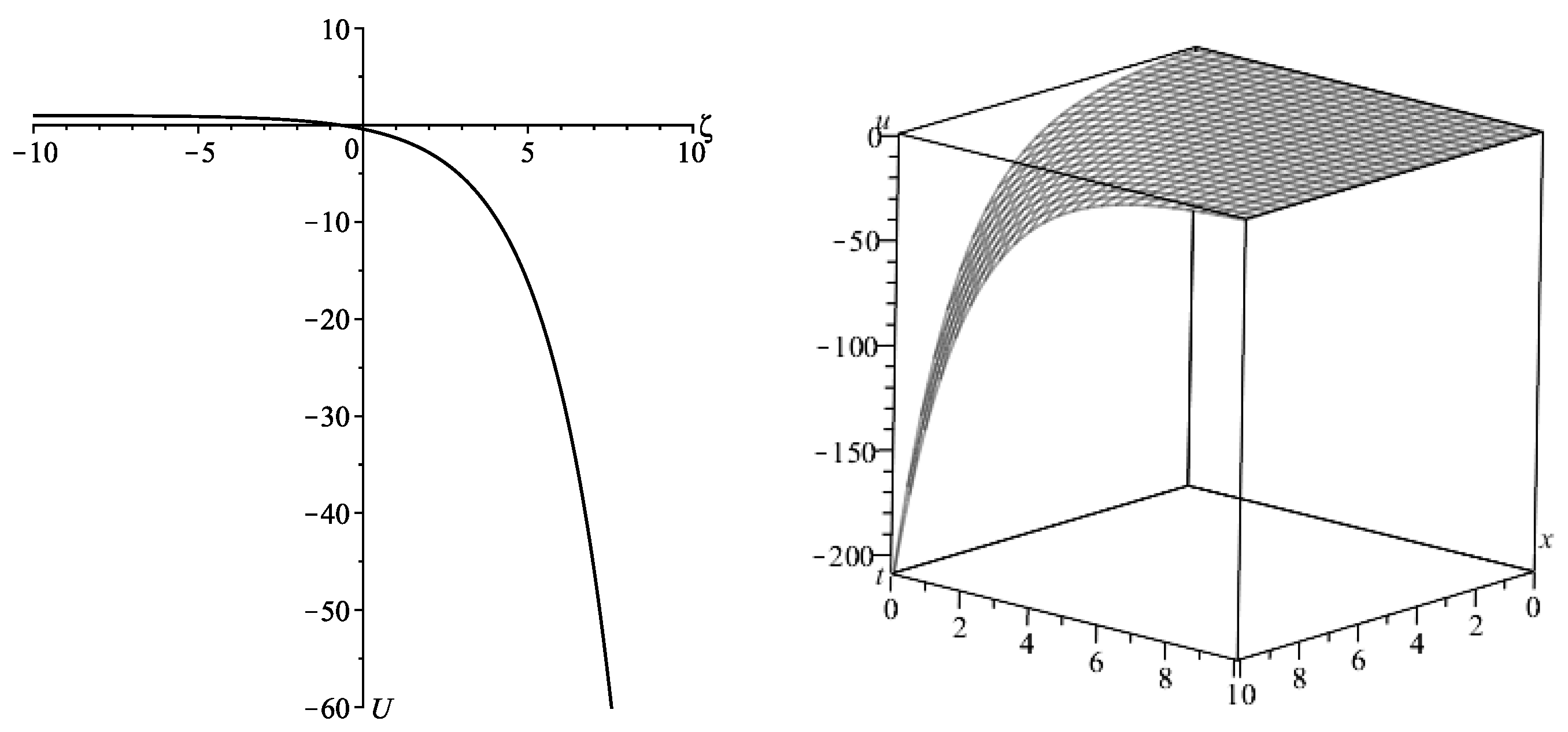
- If and , the general solution to ODE (44) isHence, the solution to ODE (38) iswhere and are integration constants.Figure 6 shows a solitary wave solution decaying to an asymptotically constant value and corresponds to the case . This solution is an exponential sheet.
- •
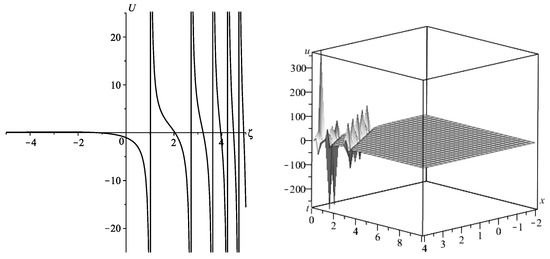
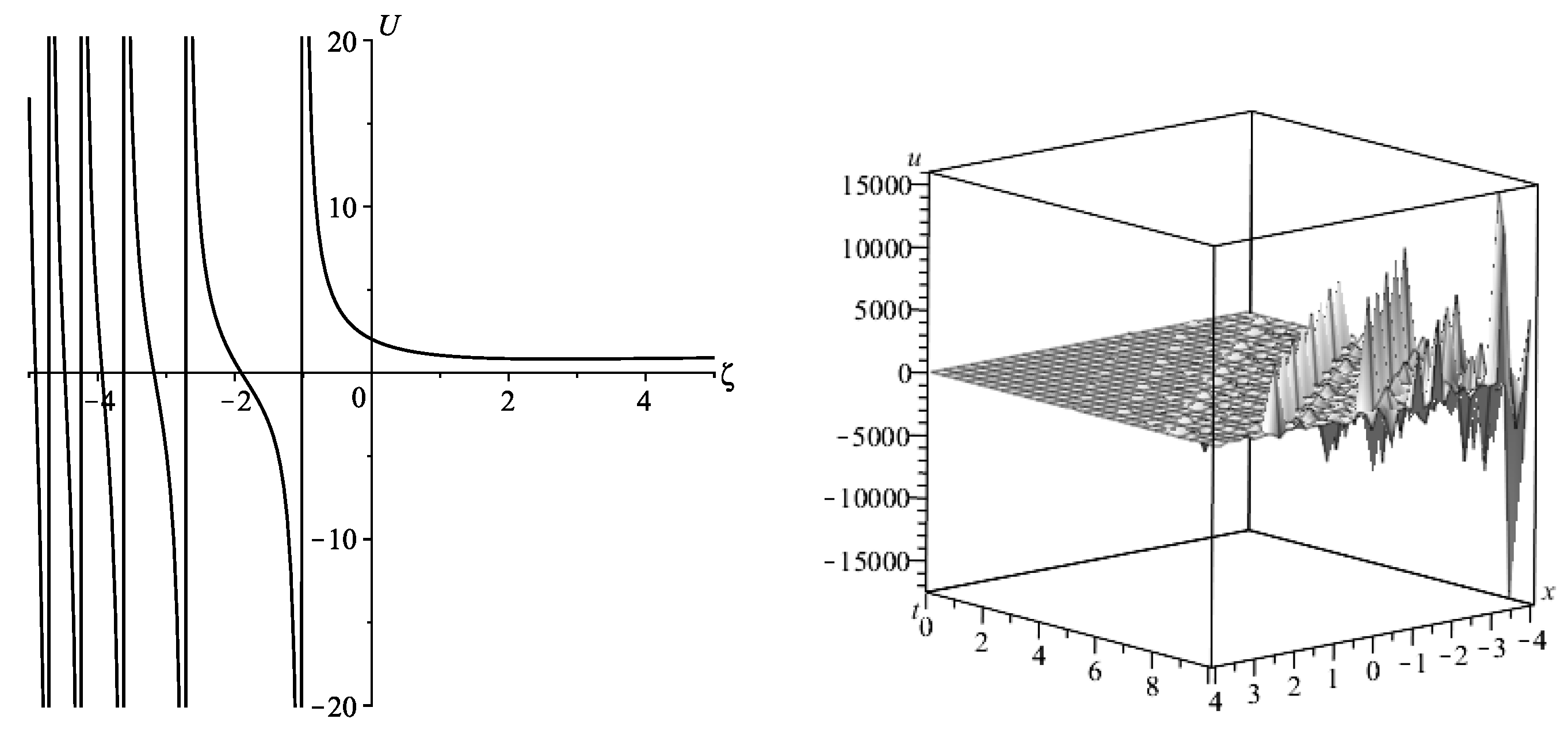
- If and , the general solution to ODE (44) isHence, the solution to ODE (38) iswhere and are integration constants.Figure 7 represents a solution given in terms of trigonometric functions and corresponds to the case . This solution becomes a singular solution if the denominator is equal to zero. Thus, depending on the choice of the parameters, it leads to a singular solution. The solution behaves as a rogue wave holding elevation peaks and deep humps.
5. Conclusions
In this paper, travelling wave solutions of the generalized time-delayed Burgers–Fisher Equation (4) were studied. This PDE has a wide applicability, especially in biological phenomena. New travelling wave solutions were obtained by using the multi-reduction theory.
The symmetry-invariant conservation law was reduced to a first integral that corresponded to a first-order Chini equation. This ODE was solved under some conditions leading to solutions written in terms of the Lerch transcendent function.
For a particular case of biological interest, the equation became a Bernoulli equation, whose solution was implicitly given by a quadrature, yielding a one-parameter exact solution corresponding to a shock wave. For , the equation described a density-dependent diffusion with a logistically growing population and the first integral became a Ricatti equation, whose solutions were given in terms of exponential, trigonometric, hyperbolic, and Bessel functions.
To the best of our knowledge, solutions (33), (46), (48), (50), (52), (54) and (56) are new and have not been previously obtained.
Additionally, a complete classification of zeroth-order conservation laws was presented with all specific time-delayed Burgers–Fisher equations of the general form (4) for which a conserved quantity of the zeroth-order derivatives of was admitted.
Author Contributions
Conceptualization, A.P.M., R.d.l.R., T.M.G. and M.L.G.; Methodology, A.P.M., R.d.l.R., T.M.G. and M.L.G.; Software, A.P.M., R.d.l.R., T.M.G. and M.L.G.; Validation, A.P.M., R.d.l.R., T.M.G. and M.L.G.; Formal analysis, A.P.M., R.d.l.R., T.M.G. and M.L.G.; Investigation, A.P.M., R.d.l.R., T.M.G. and M.L.G.; Writing—original draft, A.P.M.; Writing—review & editing, A.P.M. and M.L.G.; Visualization, A.P.M.; Supervision, M.L.G.; Project administration, M.L.G.; Funding acquisition, M.L.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
A.P.M., R.d.l.R., T.M.G. and M.L.G. warmly thank the Junta de Andalucía research group FQM-201 for its support. This work is done in memoriam of María de los Santos Bruzón.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Burgers, J.M. A mathematical model illustrating the theory of turbulence. Adv. Appl. Mech. 1948, 1, 171–199. [Google Scholar]
- Fisher, R.A. The wave of advance of advantageous genes. Ann. Eugen. 1937, 7, 355–369. [Google Scholar] [CrossRef]
- Kolmogorov, A.; Petrovsky, I.; Piscounov, N. Etude de l’equation de la diffusion avec croissance de la quantité de matière et son application a un probleme biologique. Mosc. Univ. Bull. Math. 1937, 1, 1–25. [Google Scholar]
- Satsuma, J. Topics in Soliton Theory and Exactly Solvable Nonlinear Equations; Ablowitz, M., Fuchssteiner, B., Kruskal, M., Eds.; World Scientific: Singapore, 1987. [Google Scholar]
- Hirsh, R.S. Higher order accurate difference solutions of fluid mechanics problems by a compact differencing technique. J. Comput. Phys. 1975, 19, 90–109. [Google Scholar] [CrossRef]
- Greeshields, B.; Bibbins, J.; Channing, W.; Miller, H. A study of traffic capacity. In Highway Research Board Proceedings; National Research Council: Washington, DC, USA, 1935; Volume 1935, pp. 448–477. Available online: https://onlinepubs.trb.org/Onlinepubs/hrbproceedings/14/14P1-023.pdf (accessed on 16 May 2023).
- Wang, X.; Lu, Y. Exact solutions of the extended Burgers-Fisher equation. Chin. Phys. Lett. 1990, 7, 145–147. [Google Scholar]
- Lu, J.; Yu-Cui, G.; Shu-Jiang, X. Some new exact solutions to the Burgers-Fisher equation and generalized Burgers-Fisher equation. Chin. Phys. 2007, 16, 2514–2522. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, H. New multiple soliton solutions to the general Burgers-Fisher equation and the Kuramoto-Sivashinsky equation. Chaos Solitons Fractals 2004, 19, 71–76. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The tanh method for generalized forms of nonlinear heat conduction and Burgers-Fisher equations. Appl. Math. Comput. 2005, 169, 321–338. [Google Scholar] [CrossRef]
- Wazzan, L. A modified tanh-coth method for solving the general Burgers-Fisher and the Kuramoto-Sivashinsky equations. Commun. Nonlinear Sci. Numer. Simul. 2005, 14, 2642–2652. [Google Scholar] [CrossRef]
- Wang, X.Y.; Zhu, Z.S.; Lu, Y.K. Solitary wave solutions of the generalised Burgers-Huxley equation. J. Phys. A Math. Gen. 1990, 23, 271–274. [Google Scholar] [CrossRef]
- Abdusalam, H.A. Exact analytic solution of the simplified telegraph model of propagation and dissipation of excitation fronts. Int. J. Theor. Phys. 2004, 43, 1161–1167. [Google Scholar] [CrossRef]
- Ahmed, E.; Abdusalam, H.A. On modified Black-Scholes equation. Chaos Solitons Fractals 2004, 22, 583–587. [Google Scholar] [CrossRef]
- Kar, S.; Banik, S.K.; Ray, D.S. Exact solutions of Fisher and Burgers equations with finite transport memory. J. Phys. A Math. Gen. 2003, 36, 2771–2780. [Google Scholar] [CrossRef]
- Mishra, A.; Kumar, R. Memory effects in Fisher equation with nonlinear convection term. Phys. Lett. A 2012, 376, 1833–1835. [Google Scholar] [CrossRef]
- Rosa, M.; Bruzón, M.S.; Gandarias, M.L. Lie symmetries and conservation laws of a Fisher equation with nonlinear convection term. Discret. Contin. Dyn. Syst. 2015, 8, 1331–1339. [Google Scholar] [CrossRef]
- Fahmy, E.S. Travelling wave solutions for some time-delayed equations through factorizations. Chaos Solitons Fractals 2008, 38, 1209–1216. [Google Scholar] [CrossRef]
- Tang, B.; Fan, Y.; Wang, X.; Wang, J.; Chen, S. Traveling wave solutions of the time-delayed generalized Burgers-type equations. SpringerPlus 2016, 5, 2094. [Google Scholar] [CrossRef]
- Xi-Jun, D.; Li-Bo, H.; Xi, L. Travelling solitary wave solutions for generalized time-delayed Burgers-Fisher equation. Commun. Theor. Phys. 2009, 52, 284–286. [Google Scholar] [CrossRef]
- Kim, H.; Sakthivel, R. Travelling wave solutions for time-delayed nonlinear evolution equations. Appl. Math. Lett. 2010, 23, 527–532. [Google Scholar] [CrossRef]
- Zhang, J.; Wei, P.; Wang, M. The investigation into the exact solutions of the generalized time-delayed Burgers-Fisher equation with positive fractional power terms. Appl. Math. Model. 2012, 36, 2192–2196. [Google Scholar] [CrossRef]
- Anco, S.C.; Gandarias, M.L. Symmetry multi-reduction method for partial differential equations with conservation laws. Commun. Nonlinear Sci. Numer. Simul. 2020, 91, 105349. [Google Scholar] [CrossRef]
- Anco, S.C.; Bluman, G.W. Direct construction method for conservation laws of partial differential equations. I. Examples of conservation law classifications. Eur. J. Appl. Math. 2002, 13, 545–566. [Google Scholar] [CrossRef]
- Anco, S.C.; Bluman, G.W. Direct construction method for conservation laws of partial differential equations Part II: General treatment. Eur. J. Appl. Math. 2002, 41, 567–585. [Google Scholar] [CrossRef]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1986. [Google Scholar]
- Bluman, G.W.; Anco, S.C. Symmetry and Integration Methods for Differential Equations; Applied Mathematical Sciences Series; Springer: New York, NY, USA, 2002; Volume 154. [Google Scholar]
- Bluman, G.W.; Cheviakov, A.; Anco, S.C. Applications of Symmetry Methods to Partial Differential Equations; Springer Applied Mathematics Series 168; Springer: New York, NY, USA, 2010. [Google Scholar]
- Anco, S.C. Generalization of Noether’s theorem in modern form to non-variational partial differential equations. In Recent Progress and Modern Challenges in Applied Mathematics, Modeling and Computational Science; Fields Institute Communications: Toronto, ON, Canada, 2017; Volume 79, pp. 119–182. [Google Scholar]
- Kamke, E. Differentialgleichungen Lösungsmethoden und Lösungen; Vieweg+Teubner Verlag: Wiesbaden, Germany, 2013. [Google Scholar]
- Srivastava, H.M.; Choi, J. Series Associated with the Zeta and Related Functions; Kluwer Academic Publishers: Amsterdam, The Netherlands, 2001; Volume 530. [Google Scholar]
- Mendoza, J.; Muriel, C. New exact solutions for a generalised Burgers-Fisher equation. Chaos Solitons Fractals 2021, 152, 111360. [Google Scholar] [CrossRef]
- Murray, J.D. Mathematical Biology. I. An Introduction, Interdisciplinary Applied Mathematics; Springer: New York, NY, USA, 2001; Volume 17. [Google Scholar]
- Olver, F.W.J.; Maximon, L.C. Bessel function. In NIST Handbook of Mathematical Functions; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).