Abstract
In recent years, optimization problems have received extensive attention from researchers, and metaheuristic algorithms have been proposed and applied to solve complex optimization problems. The wild horse optimizer (WHO) is a new metaheuristic algorithm based on the social behavior of wild horses. Compared with the popular metaheuristic algorithms, it has excellent performance in solving engineering problems. However, it still suffers from the problem of insufficient convergence accuracy and low exploration ability. This article presents an improved wild horse optimizer (I-WHO) with early warning and competition mechanisms to enhance the performance of the algorithm, which incorporates three strategies. First, the random operator is introduced to improve the adaptive parameters and the search accuracy of the algorithm. Second, an early warning strategy is proposed to improve the position update formula and increase the population diversity during grazing. Third, a competition selection mechanism is added, and the search agent position formula is updated to enhance the search accuracy of the multimodal search at the exploitation stage of the algorithm. In this article, 25 benchmark functions (Dim = 30, 60, 90, and 500) are tested, and the complexity of the I-WHO algorithm is analyzed. Meanwhile, it is compared with six popular metaheuristic algorithms, and it is verified by the Wilcoxon signed-rank test and four real-world engineering problems. The experimental results show that I-WHO has significantly improved search accuracy, showing preferable superiority and stability.
Keywords:
metaheuristic algorithm; wild horse optimizer; adaptive parameter; early warning strategy; competitive selection mechanism MSC:
68R12
1. Introduction
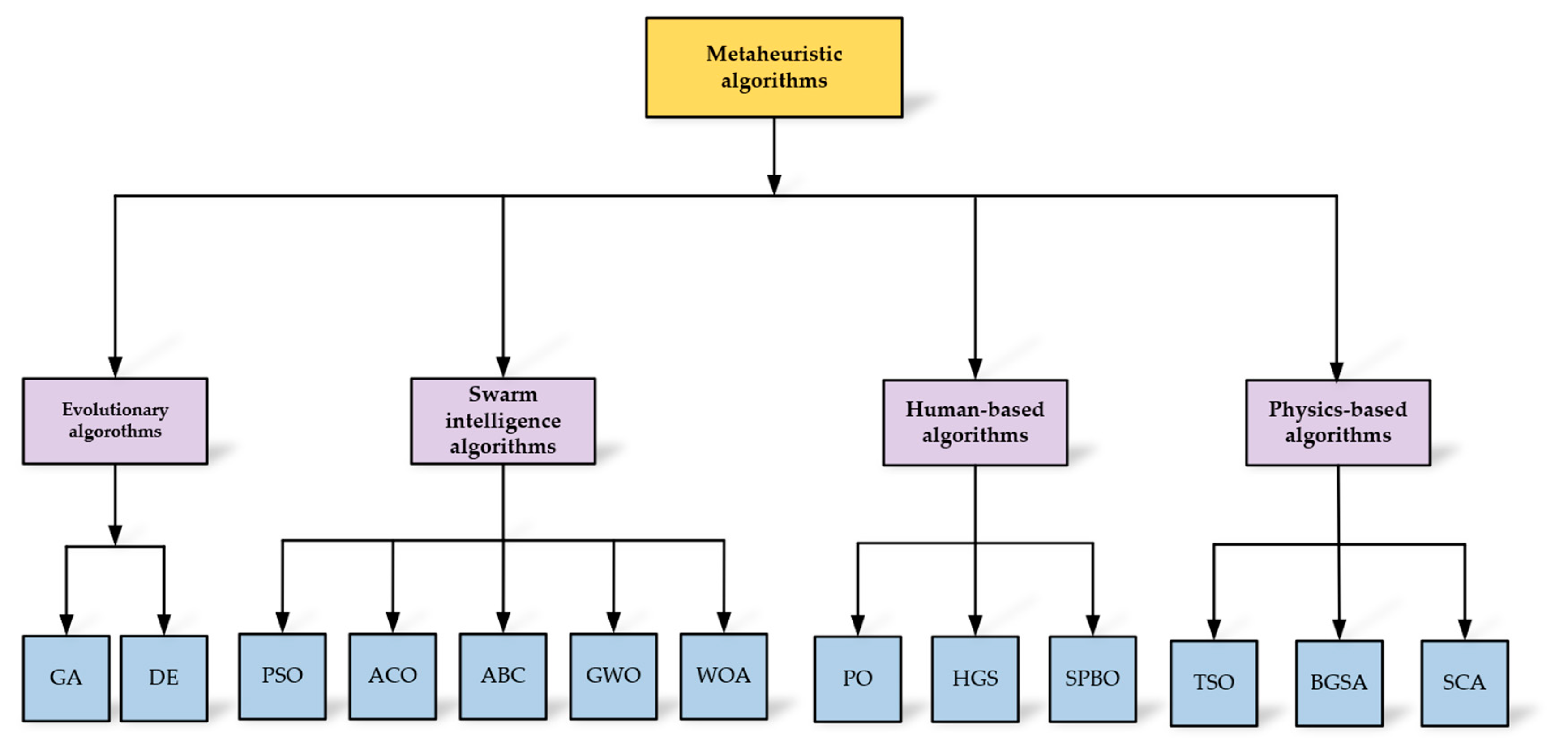
Optimization is the process of seeking the optimal solution or scheme using the combination of modern mathematics, computer science, artificial intelligence, and other multidisciplinary means. Optimization problems provide an accurate mathematical framework for solving complex choices in the real world, maximizing resource utilization, optimizing decision making, and improving system performance. Scientific innovation across various fields promotes the development and progress of various industries [1,2]. However, there is a limited application scope of traditional optimization algorithms [3] during the ever-increasing challenge of optimization problems. Researchers have begun to explore new methods to deal with this challenge, and the metaheuristic algorithm provides an effective solution to this challenge [4,5,6,7]. Metaheuristics are meta-algorithms based on heuristic algorithms, which are designed to solve various complex optimization problems. Figure 1 illustrates the four classifications of metaheuristic algorithms [8]. The first classification is evolutionary algorithms. For example, the use of the selection, crossover, and mutation operation genetic algorithm (GA) [9] of the genetic process and simulation using the differential operation to update individual species’ differential evolution (DE) [10] are inspired by the evolutionary laws in nature. The second classification is swarm intelligence algorithms that simulate swarm intelligence. For example, the particle swarm optimization (PSO) algorithm [11] is inspired by the predatory behavior of birds, the ant colony optimization (ACO) algorithm [12] is inspired by the collective behavior of ants when they search for food and their methods of communication and cooperation, the artificial bee colony (ABC) algorithm [13] is inspired by honey bee foraging behavior, the grey wolf optimization (GWO) algorithm [14] draws inspiration from the cooperative hunting and competitive behaviors observed in wild grey wolves during group activities and the hierarchical divisions among wolves, and the whale optimization algorithm (WOA) [15] is inspired by the cooperative and migratory behaviors observed in populations of whales in the ocean. For example, the political optimization (PO) algorithm [16] is inspired by political stage processes, the hunger game search (HGS) algorithm [17] is inspired by the idea of different individuals competing for limited resources and cooperating for survival, and the student psychology-based optimization (SPBO) algorithm [18] is inspired by the psychological mechanisms that influence students when dealing with various problems and challenges. The fourth classification is physics-based algorithms. For example, the transient search optimization (TSO) algorithm [19] simulates the transient behavior of switching circuits of memory elements, the binary gravitational search algorithm (BGSA) [20] based on the law of gravity and mass interaction is studied, and the sine cosine algorithm (SCA) [21] fluctuates outward or toward the best solution based on the mathematical model of sine and cosine functions.
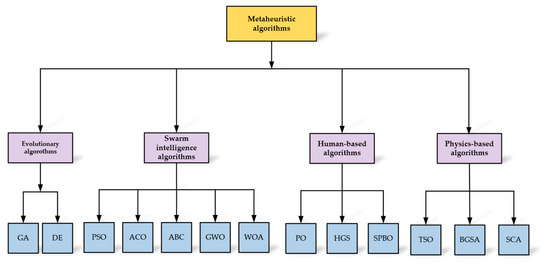
Figure 1.
Classification of metaheuristic algorithms.
However, existing metaheuristic algorithms still need to work on challenges, such as low convergence precision, difficulties in solving high-dimensional complex problems, and limited applicability and adaptability of the algorithms. Therefore, many algorithms have been improved by researchers to address their existing issues, expand the applicability of algorithms, and reduce the limitations of algorithms. Yuan et al. have improved the FOA by using multiswarm behavior to enhance the exploration ability of the algorithm [22]. Mohammad et al. have improved the population diversity and utilization of the SSA by adopting opposition-based learning and a new local search [23]. Sanjoy et al. have added a mutualism phase to the WOA to improve the explore space of the WOA [24]. Mohammad et al. have used the dimension learning-based hunting search strategy to improve the GWO, increase the population diversity of the GWO, reduce the premature convergence of the GWO, and preferably seek the balance between local and global search [25]. Meanwhile, many new metaheuristic algorithms are continuously being proposed.
The wild horse optimizer (WHO) is a successful metaheuristic algorithm, which has been recently proposed based on the social behavior of wild horses [26]. The WHO algorithm has been applied in power system frequency control [27], car parking lot location determination [28], photovoltaic model parameter extraction [29], Internet of Things system path finding [30], and automatic driving recognition calculation [31]. Although a stallion is selected to lead the team search in each iteration, which shows the strong exploitation ability of the stallion in WHO, it suffers from the problem of insufficient convergence accuracy and low exploration ability [32,33].
This article presents an improved wild horse optimizer (I-WHO) with early warning and competition mechanisms to overcome these weaknesses. There are three strategies that are used in I-WHO. First, the random operator is added to strengthen the adaptive parameters, and the convergence accuracy of the algorithm is enhanced. Second, the grazing behavior is improved, and an early warning strategy is proposed to enhance the position update formula so that the foals could better carry out activities around the stallions and increase the population diversity. Third, a competitive selection mechanism is proposed to update the search agent position formula, which improves the search accuracy of the multimodal search at the exploitation stage of the algorithm.
The main contributions of this article are as follows:
- In this article, the concepts of ‘early warning strategy’ and ‘competition mechanism’ are proposed, and the adaptive parameter TDR of WHO is improved.
- On this basis, an improved wild horse optimizer based on early warning and competition mechanisms (I-WHO) is proposed.
- This paper uses the I-WHO algorithm to conduct experiments and verify the optimal solutions of 25 mainstream test functions. The experimental results obtained are advantageous in the verification work of previous researchers.
- The I-WHO algorithm is evaluated and analyzed on engineering problems in four different engineering fields, and its performance is better than that of WHO, which has better practicability and applicability.
The rest of the article is organized as follows: Section 2 introduces the optimization principle and optimization process of WHO. Section 3 details the three strategies proposed in this paper. Section 4 presents the experimental results and analysis. Section 5 presents the practical engineering problem results and analysis. The conclusion is given in Section 6.
2. Wild Horse Optimizer
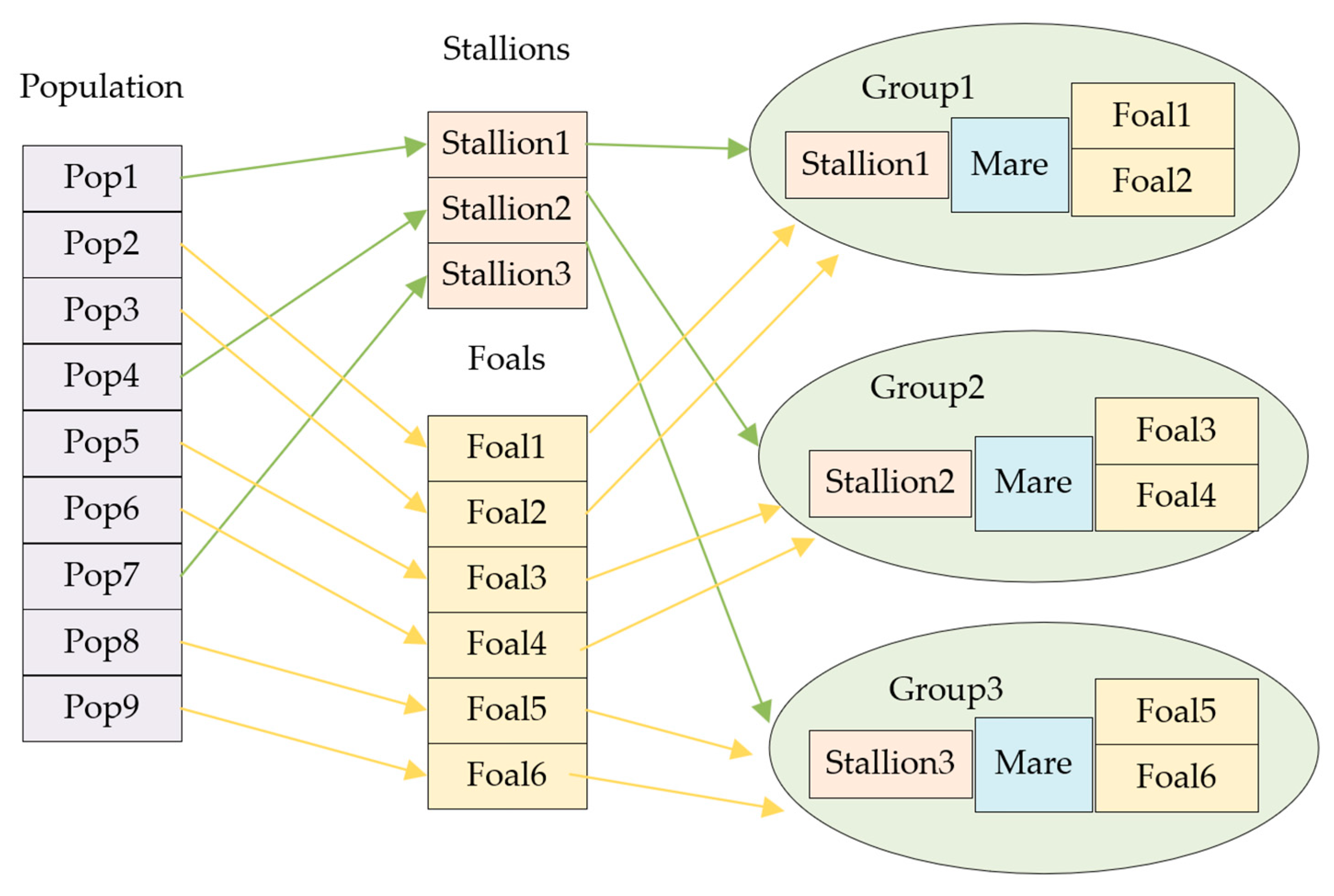
The wild horse optimizer (WHO) is proposed by Naruei et al. based on the unique living habits of wild horses, social hierarchy, the need to leave their herd after adulthood, and the inability to conduct inbreeding social behavior of wild horses [26]. In WHO, a herd consists of three kinds of horses: stallions, mares, and foals. As shown in Figure 2, to prevent siblings of the same family from mating with each other, grown foals leave their group and mate with members of other groups to form families.
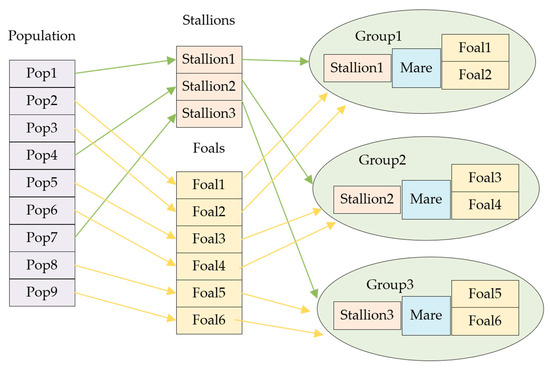
Figure 2.
The weight of the original population builds the new population.
The specific steps of WHO are as follows:
2.1. Creating Initial Populations
In the initial stage of the algorithm, the population is randomly initialized, and the target function value is determined. If is the number of group members, is the number of leaders (stallions). The proportion of stallions in the population is , which is considered as a control parameter of WHO. Stallions ; the remaining number of members is .
2.2. Grazing Behavior
The stallion is used as the center of the grazing area, and the foals search around the center. The grazing behavior is simulated by Equation (1), which makes the group members move around the lead with different radii to explore.
where is the current position of the group member and is the position of the stallion. belongs to the adaptive mechanism and is calculated by Equation (2). is a uniform random number in the range . is the new position of the group members when grazing is simulated.
where is the problem dimension. and are uniformly distributed random vectors. is an arbitrary parameter of the uniform distribution.
where is an adaptive parameter that gradually decreases from 1 to 0. denotes the current number of iterations, and denotes the maximum number of iterations.
2.3. Horse Mating Behavior
Three temporary groups, , , and , were set separately to avoid mutual mating behavior within the family. When the male (female) foals in and the female (male) foals in left, both joined the temporary group for mating. After mating, the ponies left and entered . The departure and mating behaviors of the wild horses are described by Equation (4).
where denotes the position of male (female) foal that has left and is capable of mating. denotes the position of female (male) foal that has left group and is capable of mating. denotes the position where foal with mating ability, born from foal mating with foal , leaves .
2.4. Group Leadership
The competitive behavior between each group is reflected by Equation (5). Each group is led by its leader to the water hole (suitable area). The leaders compete with each other, with the dominant group staying and the rest leaving.
where represents the next position of the leader of group . denotes the position of the water hole. represents the current position of the leader of group .
2.5. Exchange and Selection of Leaders
The leader is randomly selected to maintain the randomness of WHO. In the meantime, at the exploitation stage of WHO, the leader is selected according to fitness. When the group member has better physical ability than the group leader, the positions of the group leader and the group member are exchanged through Equation (6).
3. Hybrid-Based Improvement of the Wild Horse Optimizer
WHO has fewer parameters and low time complexity and performs well in solving engineering problems. In WHO, a stallion is selected to lead the team to move toward the search space region of the optimal solution at each iteration. However, this behavior may lead to the problem of WHO insufficient convergence accuracy and low exploration ability. Therefore, an improved wild horse optimizer utilizing early warning and competition mechanisms is proposed. First, the random operator was added to improve the adaptive parameters, and the search accuracy of WHO was enhanced. Second, the grazing behavior was improved, and an early warning strategy was proposed to enhance the position update formula so that the foals could better carry out activities around the stallions and increase the population diversity. Third, a competitive selection mechanism is proposed to update the search agent position formula, which improves the search accuracy of the multimodal search at the exploitation stage of the algorithm. The above three strategies are defined as RWHO, EWHO, and CWHO.
3.1. Improved Adaptive Parameters
The adaptive mechanism in Equation (2) plays a vital role in the balance between exploration and exploitation. However, the control process of the linear adaptive parameter to the adaptive mechanism, as well as the improvement of algorithm convergence speed and optimization accuracy, still needs to be improved. adds a random operator on the basis of so that the foal can perform a better search in the grazing stage and enhance the search accuracy of the algorithm. The model is as follows:
where the random operator has been tested many times. When the range is in , the convergence accuracy of the algorithm is better.
3.2. Early Warning Mechanism
Grazing is simulated in the WHO algorithm utilizing foals surrounding the stallion in different radii. However, the position update formula of Equation (1) is easy to fall into the local extremum space. According to the life habit of strong vigilance of wild horses, an early warning mechanism is proposed in this section. The radius of the foal in the simulated grazing was changed, and the herd moved more closely around the stallion. The position update formula is changed, and the new position update formula is described by Equation (8).
where and denote the current foal position and the stallion position, respectively. The is a random number generated within the interval from 0 to 1. The expression is shown in Equation (9) and is an adaptive parameter that decreases linearly from 2 to 1. The early warning mechanism is described by Equation (10). is controlled by the adaptive parameter .
3.3. Competitive Selection Mechanism
The behavior of wild horses competing for water holes is described by Equation (5). However, the ability of WHO to escape local extreme spaces during the exploitation stage can still be improved, and the search accuracy of WHO in solving multimodal optimization problems can also be enhanced. Inspired by a competitive strategy [34,35,36], this section proposes a competitive selection mechanism . The leader is optimized relatively fairly, and the leader who reaches the water hole first is selected to lead his team to rest. The loser quickly leads his team out of the current water hole, searches for a new water hole, and competes again with another team leader for selection. The competitive selection mechanism is described by Equation (12).
where is a random value in the range . is a fixed constant of 0.05. and are functions that influence the leader to perform movements of different radii.
3.4. Hybrid Improvement Strategy
In this section, I-WHO is combined by three strategies. In the early stage of the algorithm, the improved adaptive parameter is used to improve the search accuracy of the algorithm. When the horses are grazing, the position update formula is improved by the early warning strategy to make the foals better move around the stallion and increase the population diversity. The competitive selection mechanism is used to update the search agent position update formula, which improves the search accuracy of the multimodal search at the end of the exploitation stage of the algorithm. Algorithm 1 is the pseudocode of the I-WHO.
| Algorithm 1 Pseudocode of the I-WHO algorithm |
| 1: Initialize the population of horses randomly by |
| 2: The target function evaluates this random population, and a target value is determined |
| 3: Input |
| 4: The location of a rabbit and its fitness value |
| 5: Calculate the fitness of horses, create foal groups, and select stallions |
| 6: Find the best horse as the optimum |
| 7: while the end criterion is not satisfied do |
| 8: Calculate and by Equation (7) |
| 9: for number of stallions do |
| 10: Calculate by Equation (2) |
| 11: for number of foals of any group do |
| 12: if then |
| 13: Calculate by Equation (9) |
| 14: Calculate by Equation (10) |
| 15: Update the position of the foal by Equation (8) |
| 16: end if |
| 17: end for |
| 18: Calculate by Equation (12) |
| 19: Update the position of the by Equation (12) |
| 20: if then |
| 21: |
| 22: end if |
| 23: Select the stallion by Equation (6) |
| 24: end for |
| 25: Update optimum |
| 26: end while |
4. Experiment and Analysis
In this section, three groups of experiments were performed to present the superior performance of the I-WHO algorithm. Meanwhile, three improved strategies were tested and analyzed in the experiment. Finally, the complexity characteristics of the I-WHO algorithm were analyzed to verify the superior performance of I-WHO.
Experiment 1: The I-WHO algorithm and the WHO algorithm are analyzed in 30, 60, and 90 dimensions on 25 benchmark functions [37,38].
Experiment 2: The I-WHO algorithm and the popular metaheuristic algorithms are analyzed in 30 dimensions on 25 benchmark functions. The metaheuristic algorithms selected for the experiment include the butterfly optimization algorithm (BOA) [39], grey wolf optimization algorithm (GWO) [14], sine cosine algorithm (SCA) [25], Harris hawk optimization algorithm (HHO) [40], seahorse optimizer (SHO) [41], and student psychology-based optimization algorithm (SPBO) [18].
Experiment 3: (1) The I-WHO algorithm compared with the WHO algorithm by the Wilcoxon signed-rank test. (2) The I-WHO algorithm compared with BOA, WOA, SCA, HHO, SHO, and SPBO by the Wilcoxon signed-rank test.
Benchmark functions analysis: In the three groups of experiments, the 25 benchmark functions are divided into A and B. Group A consists of to , which consists of unimodal test functions. Group B consists of to , which consists of multimodal test functions. The expressions of the 25 benchmark functions, the search space range, and the global optimal values are shown in Table 1 and Table 2. The detailed analysis of the experiment is as follows.

Table 1.
Group A of benchmark functions.
Table 2.
Group B of benchmark functions.
4.1. Experiment 1
In this group of experiments, RWHO, EWHO, CWHO, and I-WHO are compared with WHO in dimensions 30, 60, and 90 to show the performance and characteristics of the algorithm. All algorithms are uniformly carried out under the condition that the number of search agents is 30 and the number of iterations is 500.
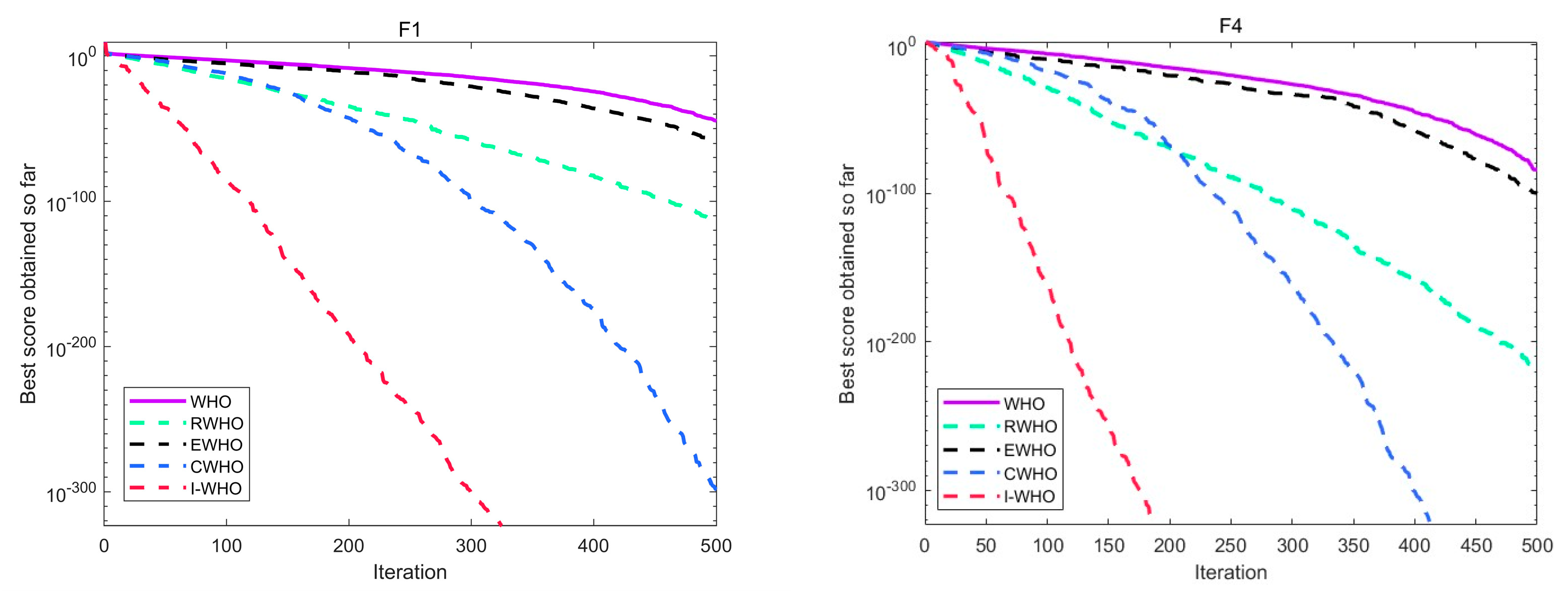
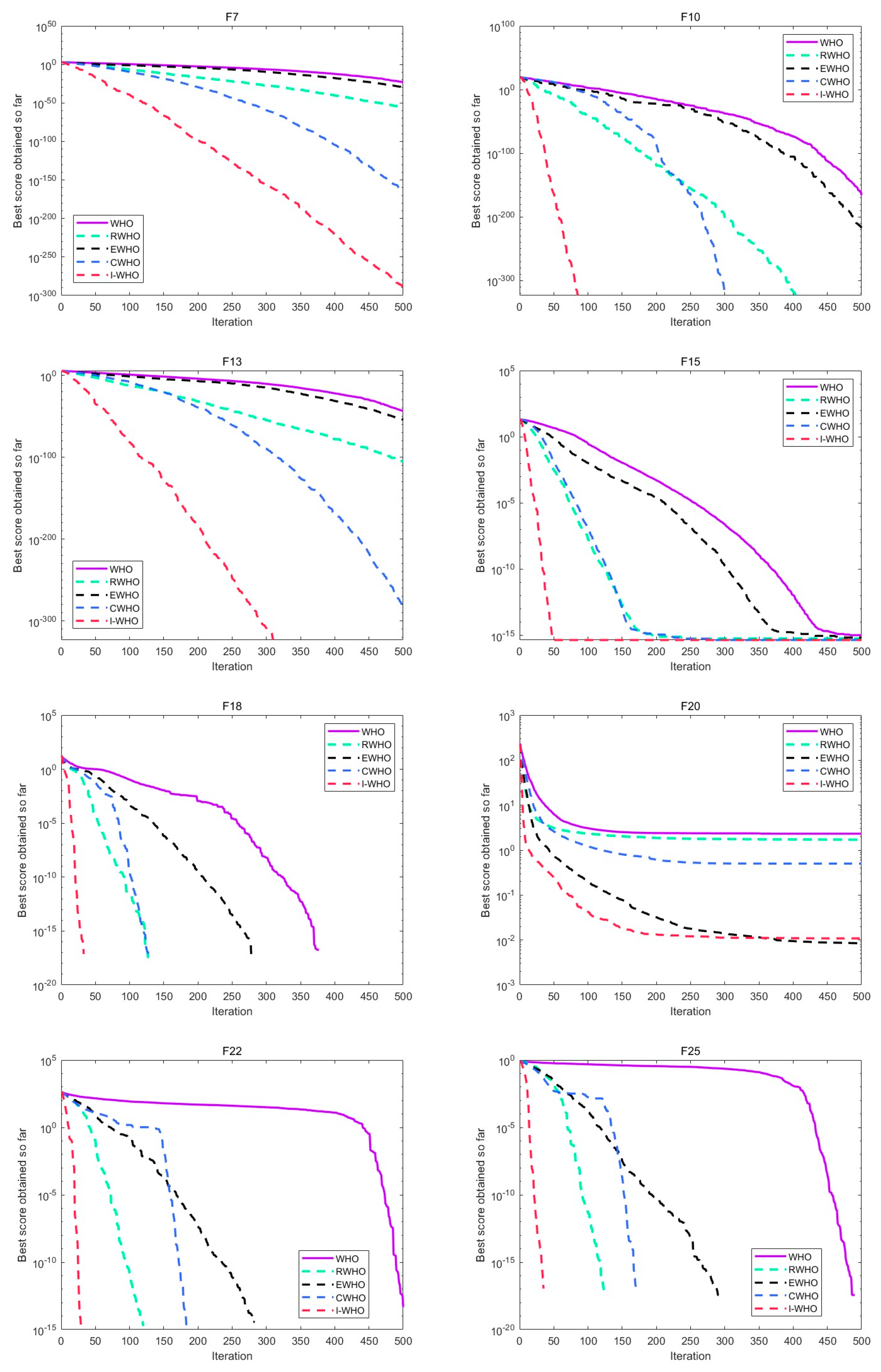
To remove the influence of some extreme values in the experiment and obtain more stable data. The experiment set up 30 independent operations and took the average, optimal value, and variance. The test results of two groups of functions, in dimensions 30, 60, and 90, are shown in Table 3, Table 4 and Table 5. The convergence curves of the two groups of test functions in dimension 30 are shown in Figure 3. Due to the limited space, only partial function convergence curves are shown in this article. These include unimodal test functions and multimodal test functions. The results show that most of the test functions are effective. In terms of convergence accuracy, the average test results of I-WHO in dimensions 30, 60, and 90 are better than those of WHO in single-modal test functions to . RWHO, EWHO, and CWHO also have significant improvements compared with WHO. Among the multimodal test functions, I-WHO has the best average results among the compared algorithms in most function tests in dimensions 30, 60, and 90. In , , and test functions in different dimensions, RWHO, EWHO, and CWHO test results are better. As can be seen in the convergence graph, when the convergence accuracy is approximately the same, the convergence speed of RWHO, EWHO, CWHO, and I-WHO is faster than that of WHO. Through testing and analyzing in different dimensions, the optimal value, average value, and variance of most test functions of the I-WHO algorithm are better than those of WHO, which proves that the I-WHO algorithm has better exploitation ability than WHO.
Table 3.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) and the WHO algorithm at Dim = 30.
Table 4.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) and the WHO algorithm at Dim = 60.
Table 5.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) and the WHO algorithm at Dim = 90.
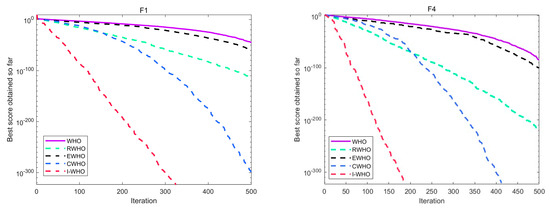
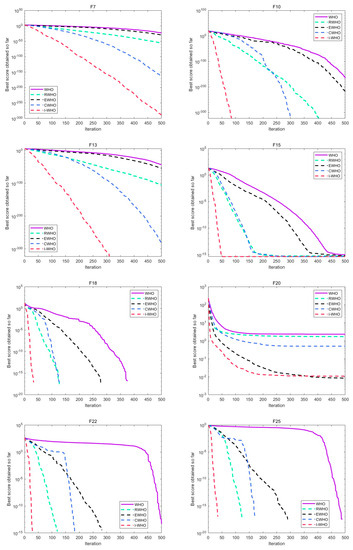
Figure 3.
Convergence curves of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) and the WHO algorithm at Dim = 30.
4.2. Experiment 2
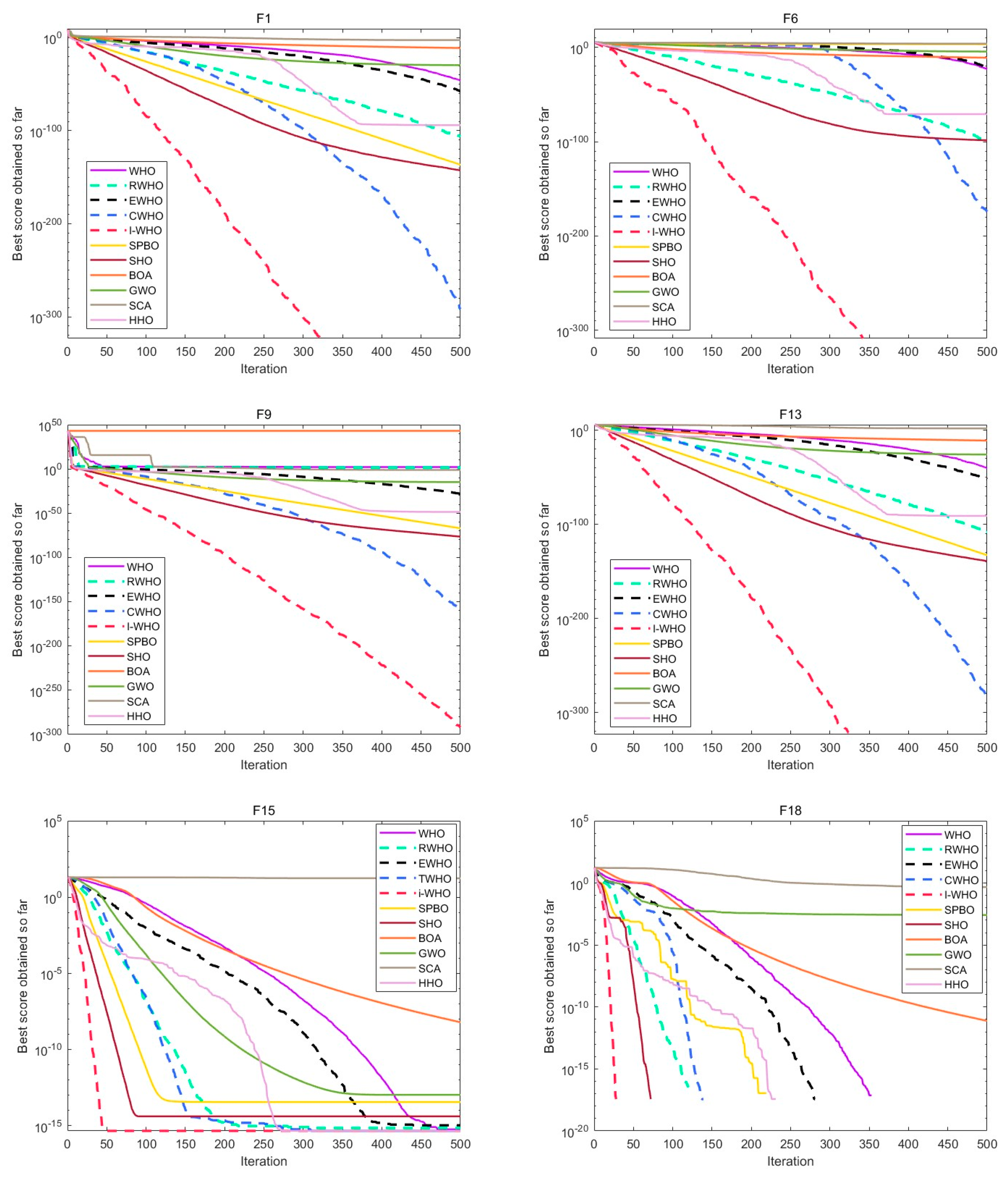
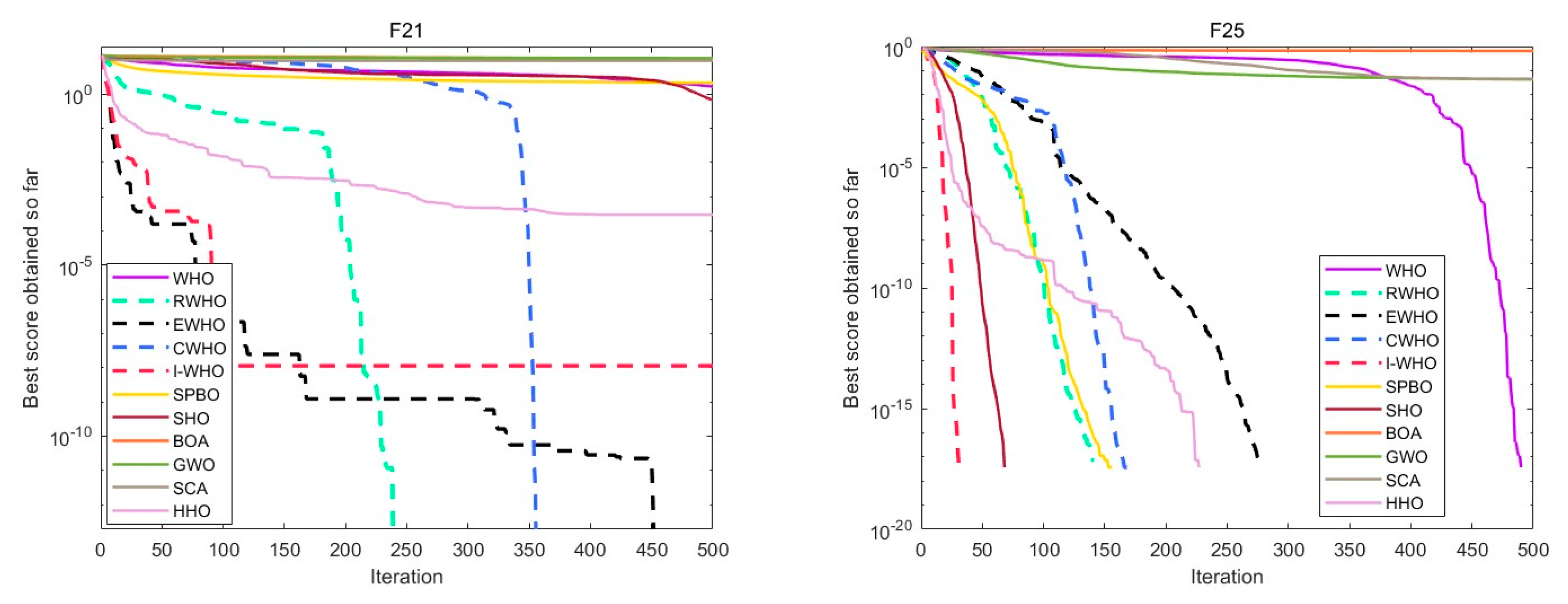
In this section, RWHO, EWHO, CWHO, and I-WHO were compared with WHO, butterfly optimization algorithm (BOA), grey wolf optimization (GWO) algorithm, sine cosine algorithm (SCA), Harris hawk optimization (HHO) algorithm, seahorse optimizer (SHO) algorithm, and student psychology-based optimization (SPBO) algorithm in 30, 60, 90, and 500 dimensions for 25 benchmark test functions. All algorithms are uniformly carried out under the condition that the number of search agents is 30 and the number of iterations is 500. The mean, optimal, and variance of the results of 30 independent runs of I-WHO and the metaheuristic algorithms are recorded in Table 6, Table 7, Table 8 and Table 9. The convergence curves of the results of the comparison between I-WHO and the metaheuristic algorithms are presented in Figure 4. Due to the limited space, only partial function convergence curves are shown in this article. These include unimodal test functions and multimodal test functions.
Table 6.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) with popular metaheuristic algorithms at Dim = 30.
Table 7.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) with popular metaheuristic algorithms at Dim = 60.
Table 8.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) with popular metaheuristic algorithms at Dim = 90.
Table 9.
Test results of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) with popular metaheuristic algorithms at Dim = 500.
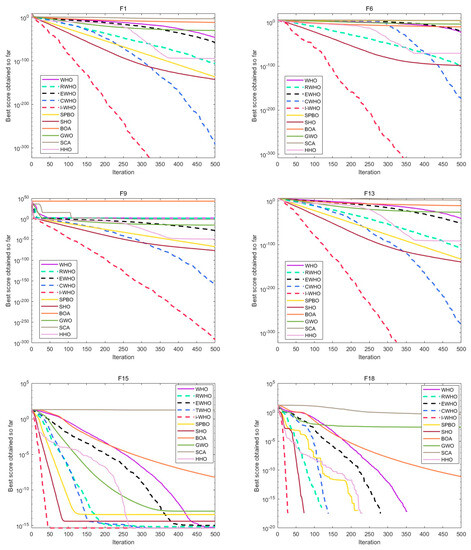
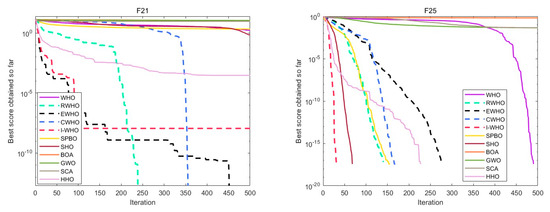
Figure 4.
Convergence curves of the improved WHO algorithm (RWHO, EWHO, CWHO, I-WHO) with the popular metaheuristic algorithms at Dim = 30.
This article selects the popular metaheuristic algorithms in recent years to assess the stability and robustness of I-WHO. Table 6, Table 7, Table 8 and Table 9 test results show that I-WHO performs most prominently, and most of the data of its average value, optimal value, and variance are ahead of other algorithms. As seen in the convergence graph, when the convergence accuracy is approximately the same, I-WHO can converge rapidly. Multimodal test functions have higher requirements on the ability of the algorithm to find the optimal global solution. CWHO is the improvement of WHO in development ability. The competitive selection mechanism improves the exploration ability of the algorithm for the optimal global solution. RWHO and EWHO are mainly aimed at improving WHO exploitation capabilities. Additionally, this study extends its analysis to 500 dimensions, building upon the groundwork established in 30, 60, and 90 dimensions. The experimental results clearly demonstrate that I-WHO outperforms other algorithms in the majority of the test functions. Notably, I-WHO not only excels in 30, 60, and 90 dimensions compared with other algorithms but also maintains its superiority and stability in the higher-dimensional scenario of 500 dimensions. It is proved that the comprehensive ability of the improved WHO algorithm is significantly improved.
4.3. Experiment 3
Nonparametric statistical tests [42] were carried out on RWHO, EWHO, CWHO, I-WHO, WHO, BOA, WOA, SCA, HHO, SHO, and SPBO to verify that the I-WHO algorithm has a significant improvement. A nonparametric statistical test, also known as Wilcoxon signed-rank test, assumes that there is a proportional error between the two groups of samples and does not need to assume that the samples obey normal distribution, which is more reliable than the t-test, and the impact of outlier test results is less [43]. The Wilcoxon signed-rank test with a p-value of less than 0.05 is considered sufficient evidence to reject the null hypothesis. In the experiment, the improved WHO algorithm was compared with two groups at a 5% significance level.
Table 10 and Table 11 present the test results of p-values. It can be seen from Table 10 that most of the p-values of the I-WHO algorithm are less than 0.05, indicating that the I-WHO algorithm has significant differences compared with WHO. The test results in Table 11 are relatively easy to discern that I-WHO has significant superiority over BOA, WOA, SCA, HHO, SHO, and SPBO in most of the 25 benchmark functions. It is proved that the I-WHO algorithm has preferable performance in convergence accuracy. In Experiment 1, the results of RWHO, EWHO, CWHO, I-WHO, and WHO for are 0. In Experiment 2, the results of BOA, GWO, HHO, SHO, SPBO, and I-WHO are 0 in the same test function, resulting in ‘NaN’ in the Wilson rank sum test. Therefore, the results in Table 10 and Table 11 do not refer to the ‘NaN’ results.
Table 10.
Results of Wilcoxon signed-rank test p-values for RWHO, EWHO, CWHO, I-WHO, and WHO comparisons.
Table 11.
Results of Wilcoxon signed-rank test p-values for I-WHO and popular metaheuristic algorithms.
4.4. Complexity Characteristic Analysis
This paper evaluates the performance and efficiency of the algorithm by calculating its complexity. Calculating the complexity of the I-WHO algorithm considers the number of iterations of the algorithm loop and the operations in each iteration. This article uses to represent complexity. The complexity of the algorithm proposed in the paper can be summarized as follows:
- Initialization phase:Initialize the number of leaders and group members:.Initialize the leader and group members: .Initialize the location and cost of each member: .
- The main loop phase:The main loop total number of iterations: .
- Each iteration consists of two main loops:Leader cycle:
- Each leader ranks his group members: .
- Update the group members for each leader: .
Team members cycle:- Each foal herding behavior: .
- Update the location and cost of leaders: .
- Overall complexity:
I-WHO and WHO have the same computational complexity, so the operation of I-WHO does not consume more resources. In the meantime, this paper proposes early warning and competition mechanisms to solve the test function optimization problem. The convergence accuracy is significantly improved compared with WHO and mainstream metaheuristic algorithms. Therefore, the algorithm performance of I-WHO is excellent.
5. Engineering Design Problems
In this section, four real-world engineering design problems are selected to evaluate the applicability and practicality of I-WHO. These four problems study the typical cantilever beam design problems in the field of engineering mechanics, more complex I-shaped beam problems in the field of structure engineering, the specific design of tension/compression spring problems in the field of mechanical engineering, and the challenging car side impact problem in the field of automotive engineering.
In this study, the performance of I-WHO is comprehensively evaluated. The number of search agents in the algorithm is uniformly set as 30. The algorithm has the advantages of smaller exploration space and finding solutions in fewer iterations when solving engineering problems. Therefore, in experiments on engineering design problems, the number of iterations of the algorithm is uniformly set to 100. The number of experimental executions is uniformly set to perform ten operations and take the average to remove the influence of some extreme values in the experiment to obtain more stable data. The following is the introduction of the evaluation metrics in this section:
- The best index refers to the optimal solution obtained by multiple runs of the algorithm in the experiment.
- The worst indicators are experimental algorithms run multiple times to get the worst solution. Through the lower limit index, we can clearly understand the performance of the algorithm.
- The average index is the average result obtained by multiple runs of the algorithm in the experiment, which can directly reflect the overall performance of the algorithm and avoid the randomness and contingency of the experiment.
- The standard deviation index refers to access to the solution of the distribution condition. The smaller the value, the higher the results of the algorithm, which is more stable.
- The median index is the median of the results of multiple runs of each algorithm in the experiment, which can intuitively reflect the stability of the algorithm.
5.1. Cantilever Beam
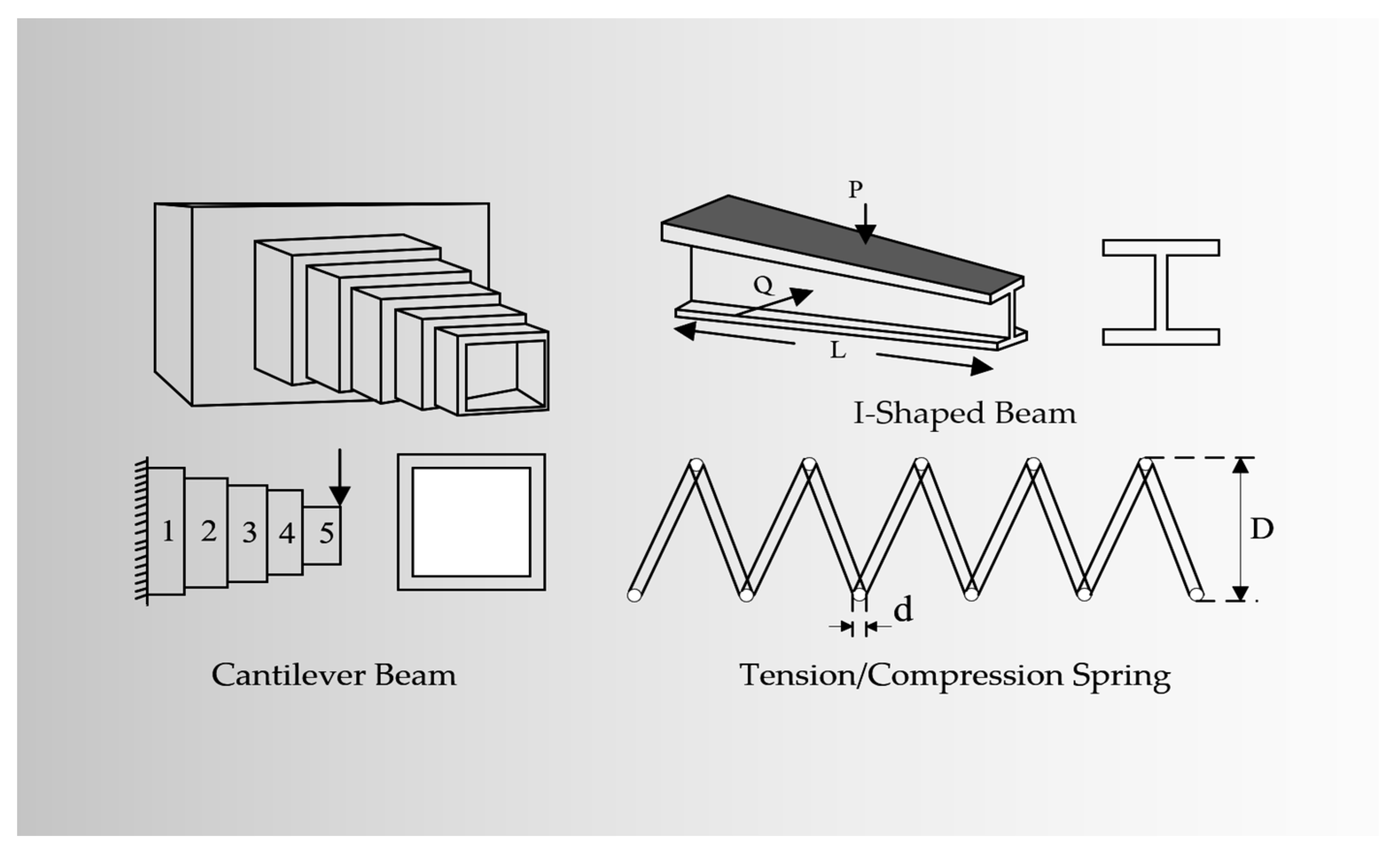
The cantilever beam problem [35,44] is a classical engineering mechanics problem, which has the characteristics of a single support point, concentrated bending moment, disturbance problem, and uneven stress distribution. In engineering applications under different conditions, the analysis of the deformation and stress distribution of the cantilever can help researchers understand the behavior of the engineering structure and propose design schemes to improve the performance and safety of the structure. The design and calculation of the cantilever beam need to consider the geometric shape, material properties, stress conditions, and other factors of the beam to determine the beam size, support mode, material, and other parameters to ensure the strength, stiffness, and stability of the beam. The main problem of cantilever beams is to minimize the weight and cost of the trabeculae to improve their economy and sustainability while meeting the engineering requirements. Figure 5 presents the general structure of the cantilever beam. The relevant model and conditions for the cantilever beam problem are given below:
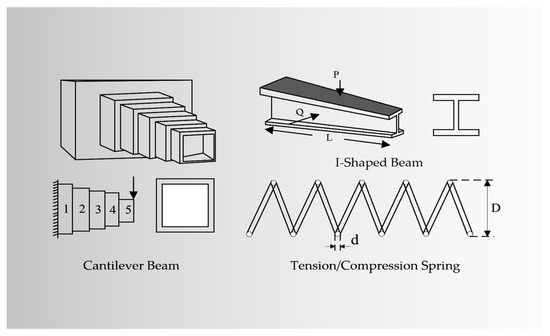
Figure 5.
Description diagram of real-world optimization problems.
- Minimize:
- Subject to:
- Variable range:
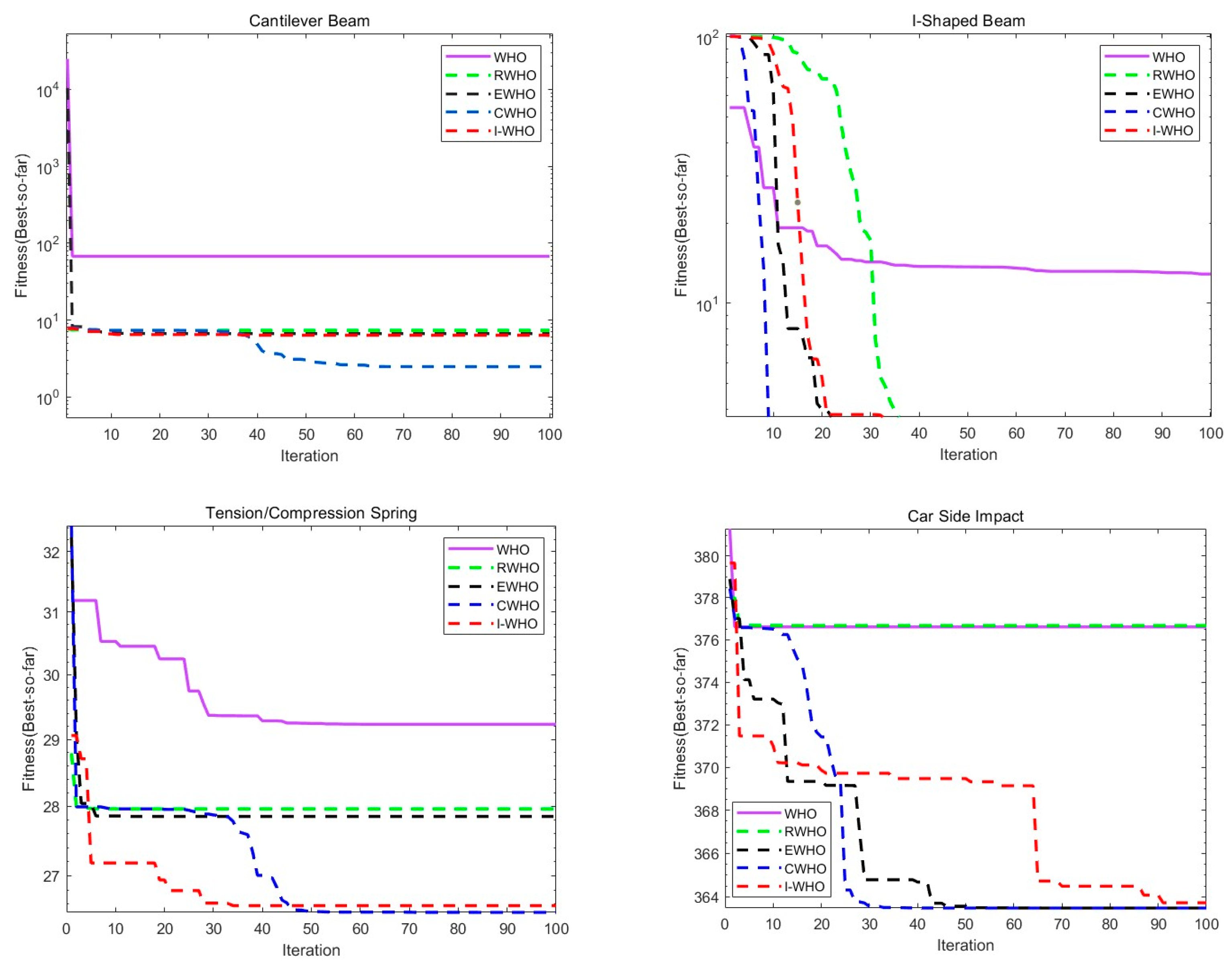
I-WHO and WHO studies of cantilever beam problems appear in Table 12, and the problem of the convergence curve is presented in Figure 6. The results clearly show that the difference between the best and the worst solution is small for I-WHO, and the difference between the best and the worst solution is large for WHO. The mean and standard deviation of I-WHO are far less than those of WHO, and the median of I-WHO and WHO are similar. Therefore, I-WHO has better stability and practicability when dealing with classical mechanical engineering problems, such as cantilever beams.
Table 12.
Test results of the cantilever beam optimization problem.
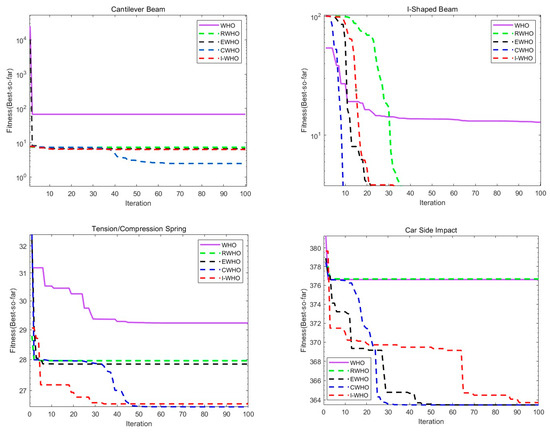
Figure 6.
Convergence curves of real-world optimization problems.
5.2. Optimal Design of I-Shaped Beam
Compared with the cantilever beam, the I-shaped beam is more complex [45,46]. It has complicated geometry, more physical field coupling, boundary condition change, and material nonlinearity, and is widely used in the engineering field. The I-shaped beam mainly solves the problem of horizontal load and vertical load in building structures. The I-shaped beam is an essential part of the building structure to bear the burden, and its use can make the building stable and safe. In addition, the I-shaped beam can also improve the overall strength and stiffness of the building and can be connected in different ways and combinations to meet various building needs. Figure 5 shows a 3D view of the I-shaped beam on the left and a schematic of the side structure of the I-shaped beam on the right. The primary purpose of this problem is to minimize the vertical interference of the I-shaped beam. The relevant model and conditions for the I-shaped beam problem are given below:
- Minimize:
- Subject to:
- Variable range:
I-WHO and WHO studies of I-shaped beam problems appear in Table 13, and the problem of the convergence curve is presented in Figure 6. The results clearly show that in the case of the same optimal solution, the difference between the optimal solution and the worst solution of I-WHO is small, and the mean, standard deviation, and intermediate value are smaller than those of WHO. Therefore, in view of the problem in a cantilever beam, I-WHO has better stability and applicability.
Table 13.
Test results of the I-shaped beam optimization problem.
5.3. Design of Tension/Compression Spring
The design of a tension/compression spring problem [47] is a representative problem in mechanical engineering. Its bidirectional loading, simple geometry, uniform stress distribution, and other characteristics are very important for engineering research. The design of tension/compression springs mainly addresses the problems of load bearing, deformation control, mechanical properties, and material selection in mechanical applications. The spring general structure is presented in Figure 5. The relevant model and conditions for the tension/compression spring problem are given below:
- Minimize:
- Subject to:
- Variable range:
I-WHO and WHO studies of the design of tension/compression springs problems appear in Table 14, and the problem of the convergence curve is presented in Figure 6. The results clearly show that the difference between the optimal solution and the worst solution of I-WHO is less than that of WHO. The average, standard deviation, and median are all superior to WHO. Therefore, the design of the tension/compression spring problem of I-WHO has more advantages than WHO, and I-WHO has better stability and robustness.
Table 14.
Test results of the tension/compression spring design optimization problem.
5.4. Car Side Impact Design
Car side impact design [48] is a representative problem in the field of automotive engineering, and the safety of drivers and passengers is very important. The design of this problem needs to consider the safety performance of the vehicle in different conditions, the driving speed of the car, the collision angle, the collision object, and the motion track of the car. In the meantime, the car side impact design also needs to consider the strength of the body structure performance factors. The goal of the problem is to use the nine parameters to minimize the weight of the door. The related model and conditions of automobile side impact design problems are as follows:
- Minimize:
- Subject to:
- Variable range:
I-WHO and WHO studies of the car side impact design problems appear in Table 15, and the problem of the convergence curve is presented in Figure 6. The results clearly show that the difference between the optimal solution and the worst solution of I-WHO is less than that of WHO. The average, standard deviation, and median are all superior to WHO. Therefore, I-WHO performs better than WHO in this problem, which shows superior stability and applicability.
Table 15.
Test results of the car side impact design problem.
This paper evaluates I-WHO through representative real-world engineering design problems in four different domains. Through the experimental data and the convergence curve, it is easy to see that I-WHO is ahead of WHO regarding the difference between the best solution and the worst solution, the mean value, the standard deviation, and the median value of the four problems analyzed above. This indicates that I-WHO can reach higher accuracy and better robustness. It has been proved that the I-WHO algorithm has better adaptability and practicability in practical engineering problems.
6. Conclusions
This article presents an improved wild horse optimizer (I-WHO) utilizing early warning and competition mechanisms to enhance the insufficient convergence accuracy and low exploration ability of the WHO algorithm. Three strategies are used in the I-WHO algorithm, which are as follows:
- The random operator is added to improve the adaptive parameters;
- An early warning strategy is proposed to enhance the position update formula;
- A competitive selection mechanism is proposed to update the search agent position formula.
Each strategy is experimentally analyzed with 25 benchmark functions in 30, 60, 90, and 500 dimensions. Compared with the WHO algorithm, the I-WHO algorithm shows better search accuracy and convergence performance. Compared with six popular metaheuristic algorithms and Wilson rank test simulation experiments, the I-WHO algorithm performs well in most test functions and has excellent performance, indicating that the I-WHO algorithm has a significant improvement. In addition, four real-world engineering problems are analyzed using the I-WHO algorithm. The optimization results show that the I-WHO algorithm can achieve higher accuracy and better robustness. It further verifies the adaptability and practicability of the I-WHO algorithm in solving real-world optimization problems.
Although this article has made some progress in the study of WHO, it has been proposed for a short time, and there will be many new problems and new challenges to solve in the future. Compared with WHO, I-WHO has higher optimization performance. In future research work, this algorithm can be combined with machine learning fields. In the task of 3D medical image segmentation, I-WHO can improve the accuracy of 3D medical image segmentation and the efficiency of training in supervised learning. Meanwhile, the I-WHO algorithm can be used as a way of unsupervised learning to complete related tasks, such as image segmentation and image registration.
Author Contributions
L.C.: methodology, writing—reviewing, and supervision; Y.Z.: data collation and tabulation, writing—reviewing and editing, revising the manuscript, and software; Y.M.: writing—reviewing and editing and plotting the figures; B.Z.: provided valuable input and discussions in the early stages of the research and participated in experimental design and result interpretation; C.F.: participated in the analysis and interpretation of experimental data and reviewed the writing and revision of the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This study was supported by the National Natural Science Foundation of China (No. 61535008), the Natural Science Foundation of Tianjin (No. 20JCQNJC00430), the National Natural Science Foundation of China (No. 62203332), and the Tianjin Research Innovation Project for Postgraduate Students (No. 2022SKYZ309).
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Acknowledgments
The authors would like to thank the anonymous reviewers for their valuable comments and suggestions.
Conflicts of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Kang, H.; Liu, R.; Yao, Y.; Yu, F. Improved Harris hawks optimization for non-convex function optimization and design optimization problems. Math. Comput. Simul. 2023, 204, 619–639. [Google Scholar] [CrossRef]
- Agarwal, N.; Shrivastava, N.; Pradhan, M. Ananya Algorithm: A Simple and New Optimization Algorithm for Engineering Optimization. In Proceedings of the 2021 4th Biennial International Conference on Nascent Technologies in Engineering (ICNTE), Navi Mumbai, India, 15–16 January 2021; pp. 1–6. [Google Scholar]
- Kohli, M.; Arora, S. Chaotic grey wolf optimization algorithm for constrained optimization problems. J. Comput. Des. Eng. 2018, 5, 458–472. [Google Scholar] [CrossRef]
- Khalid, O.W.; Isa, N.A.M.; Sakim, H.A.M. Emperor penguin optimizer: A comprehensive review based on state-of-the-art meta-heuristic algorithms. Alex. Eng. J. 2023, 63, 487–526. [Google Scholar] [CrossRef]
- Kaveh, M.; Mesgari, M.S.; Saeidian, B. Orchard Algorithm (OA): A New Meta-Heuristic Algorithm for Solving Discrete and Continuous Optimization Problems. Math. Comput. Simul. 2023, 208, 95–135. [Google Scholar] [CrossRef]
- Eslami, N.; Yazdani, S.; Mirzaei, M.; Hadavandi, E. Aphid–Ant Mutualism: A novel nature-inspired metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 2022, 201, 362–395. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Hussain, K.; Mabrouk, M.S.; Al-Atabany, W. Honey Badger Algorithm: New metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 2022, 192, 84–110. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Abd Elaziz, M.; Gandomi, A.H. The Arithmetic Optimization Algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Grefenstette, J.J. Genetic algorithms and machine learning. In Proceedings of the Sixth Annual Conference on Computational Learning Theory, Santa Cruz, CA, USA, 26–28 July 1993; pp. 3–4. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization Over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the 6th International Symposium on Micro Machine and Human Science (MHS’95), Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Blum, C. Ant Colony Optimization: Introduction and Recent Trends. Phys. Life Rev. 2005, 2, 353–373. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A Powerful and Efficient Algorithm for Numerical Function Optimization: Artificial Bee Colony (ABC) Algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Reddy, K.; Saha, A.K. A Modified Whale Optimization Algorithm for Exploitation Capability and Stability Enhancement. Heliyon 2022, 8, e11027. [Google Scholar] [CrossRef]
- Askari, Q.; Younas, I.; Saeed, M. Political Optimizer: A Novel Socio-Inspired Meta-Heuristic for Global Optimization. Knowledge-Based Syst. 2020, 195, 105709. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, H.; Heidari, A.A.; Gandomi, A.H. Hunger Games Search: Visions, Conception, Implementation, Deep Analysis, Perspectives, and Towards Performance Shifts. Expert Syst. Appl. 2021, 177, 114864. [Google Scholar] [CrossRef]
- Das, B.; Mukherjee, V.; Das, D. Student psychology based optimization algorithm: A new population based optimization algorithm for solving optimization problems. Adv. Eng. Softw. 2020, 146, 102804. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Transient Search Optimization: A New Meta-Heuristic Optimization Algorithm. Appl. Intell. 2020, 50, 3926–3941. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. BGSA: Binary Gravitational Search Algorithm. Nat. Comput. 2010, 9, 727–745. [Google Scholar] [CrossRef]
- Yuan, X.; Dai, X.; Zhao, J.; He, Q. On a Novel Multi-Swarm Fruit Fly Optimization Algorithm and Its Application. Appl. Math. Comput. 2014, 233, 260–271. [Google Scholar] [CrossRef]
- Tubishat, M.; Idris, N.; Shuib, L.; Abushariah, M.A.; Mirjalili, S. Improved Salp Swarm Algorithm Based on Opposition Based Learning and Novel Local Search Algorithm for Feature Selection. Expert Syst. Appl. 2020, 145, 113122. [Google Scholar] [CrossRef]
- Chakraborty, S.; Saha, A.K.; Sharma, S.; Mirjalili, S.; Chakraborty, R. A Novel Enhanced Whale Optimization Algorithm for Global Optimization. Comput. Ind. Eng. 2021, 153, 107086. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An Improved Grey Wolf Optimizer for Solving Engineering Problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F. Wild Horse Optimizer: A New Meta-Heuristic Algorithm for Solving Engineering Optimization Problems. Eng. Comput. 2022, 38, 3025–3056. [Google Scholar] [CrossRef]
- Khudhair, M.; Ragab, M.; AboRas, K.M.; Abbasy, N.H. Robust control of frequency variations for a multi-area power system in smart grid using a newly wild horse optimized combination of PIDD2 and PD controllers. Sustainability 2022, 14, 8223. [Google Scholar] [CrossRef]
- Rao, C.S.P.; Pandian, A.; Reddy, C.R.; Aymen, F.; Alqarni, M.; Alharthi, M.M. Location Determination of Electric Vehicles Parking Lot with Distribution System by Mexican AXOLOTL Optimization and Wild Horse Optimizer. IEEE Access 2022, 10, 55408–55427. [Google Scholar] [CrossRef]
- Ramadan, A.; Kamel, S.; Taha, I.B.; Tostado-Véliz, M. Parameter estimation of modified double-diode and triple-diode photo- voltaic models based on wild horse optimizer. Electronics 2021, 10, 2308. [Google Scholar] [CrossRef]
- Marzouk, R.; Alzahrani, J.S.; Alrowais, F.; Al-Wesabi, F.N.; Hamza, M.A. Quasi-Oppositional Wild Horse Optimization Based Multi-Agent Path Finding Scheme for Real Time IoT Systems. Expert Syst. 2022, 39, e13112. [Google Scholar] [CrossRef]
- Alabdulkreem, E.; Alzahrani, J.S.; Nemri, N.; Alharbi, O.; Mohamed, A.; Marzouk, R.; Hilal, A.M. Computational Intelligence with Wild Horse Optimization Based Object Recognition and Classification Model for Autonomous Driving Systems. Appl. Sci. 2022, 12, 6249. [Google Scholar] [CrossRef]
- Zheng, R.; Hussien, A.G.; Jia, H.M.; Abualigah, L.; Wang, S.; Wu, D. An improved wild horse optimizer for solving optimization problems. Mathematics 2022, 10, 1311. [Google Scholar] [CrossRef]
- Li, Y.; Yuan, Q.; Han, M.; Cui, R. Hybrid Multi-Strategy Improved Wild Horse Optimizer. Adv. Intell. Syst. 2022, 4, 2200097. [Google Scholar] [CrossRef]
- Lan, R.; Zhu, Y.; Lu, H.; Tang, Z.; Liu, Z.; Luo, X. Large-Scale Optimisation via Cooperatively Coevolving Competition Swarm Optimiser. Enterp. Inf. Syst. 2020, 14, 1439–1456. [Google Scholar] [CrossRef]
- Han, F.; Zheng, M.; Ling, Q. An Improved Multiobjective Particle Swarm Optimization Algorithm Based on Tripartite Competition Mechanism. Appl. Intell. 2022, 52, 5784–5816. [Google Scholar] [CrossRef]
- Hosseini, S.; Al Khaled, A. A survey on the imperialist competitive algorithm metaheuristic: Implementation in engineering domain and directions for future research. Appl. Soft Comput. 2014, 24, 1078–1094. [Google Scholar] [CrossRef]
- Seck-Tuoh-Mora, J.C.; Hernandez-Romero, N.; Santander-Baños, F.; Volpi-Leon, V.; Medina-Marin, J.; Lagos-Eulogio, P. A Majority–Minority Cellular Automata Algorithm for Global Optimization. Expert Syst. Appl. 2022, 203, 117379. [Google Scholar] [CrossRef]
- Kiran, M.S.; Hakli, H.; Gunduz, M.; Uguz, H. Artificial bee colony algorithm with variable search strategy for continuous optimization. Inf. Sci. 2015, 300, 140–157. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly Optimization Algorithm: A Novel Approach for Global Optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris Hawks Optimization: Algorithm and Applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, T.; Ma, S.; Wang, M. Sea-Horse Optimizer: A Novel Nature-Inspired Meta-Heuristic for Global Optimization Problems. Appl. Intell. 2023, 53, 11833–11860. [Google Scholar] [CrossRef]
- Hussain, K.; Zhu, W.; Salleh, M.N.M. Long-Term Memory Harris’ Hawk Optimization for High Dimensional and Optimal Power Flow Problems. IEEE Access 2019, 7, 147596–147616. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A Practical Tutorial on the Use of Nonparametric Statistical Tests as a Methodology for Comparing Evolutionary and Swarm Intelligence Algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Hao, Y.; Zhang, M.; Cui, Y.; Cheng, G.; Xie, J.; Chen, Y. Dynamic analysis of variable fractional order cantilever beam based on shifted Legendre polynomials algorithm. J. Comput. Appl. Math. 2023, 423, 114952. [Google Scholar] [CrossRef]
- Xiong, X.; He, L.; Bao, L. Experimental Study on Flexural Behavior of Full-Scale Retard-Bonded Prestressed UHPC Variable section Cantilever Beams. Eng. Struct. 2023, 284, 115943. [Google Scholar] [CrossRef]
- Couto, C.; Real, P.V. Numerical investigation on the influence of imperfections in the lateral-torsional buckling of beams with slender I-shaped welded sections. Thin-Walled Struct. 2019, 145, 106429. [Google Scholar] [CrossRef]
- Tzanetos, A.; Blondin, M. A Qualitative Systematic Review of Metaheuristics Applied to Tension/Compression Spring Design Problem: Current Situation, Recommendations, and Research Direction. Eng. Appl. Artif. Intell. 2023, 118, 105521. [Google Scholar] [CrossRef]
- Lim, T.S.; Gil Lee, D. Mechanically fastened composite side-door impact beams for passenger cars designed for shear-out failure modes. Compos. Struct. 2002, 56, 211–221. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).