
Resultant Normal Contact Force-Based Contact Friction Model for the Combined Finite-Discrete Element Method and Its Validation




Abstract
:1. Introduction
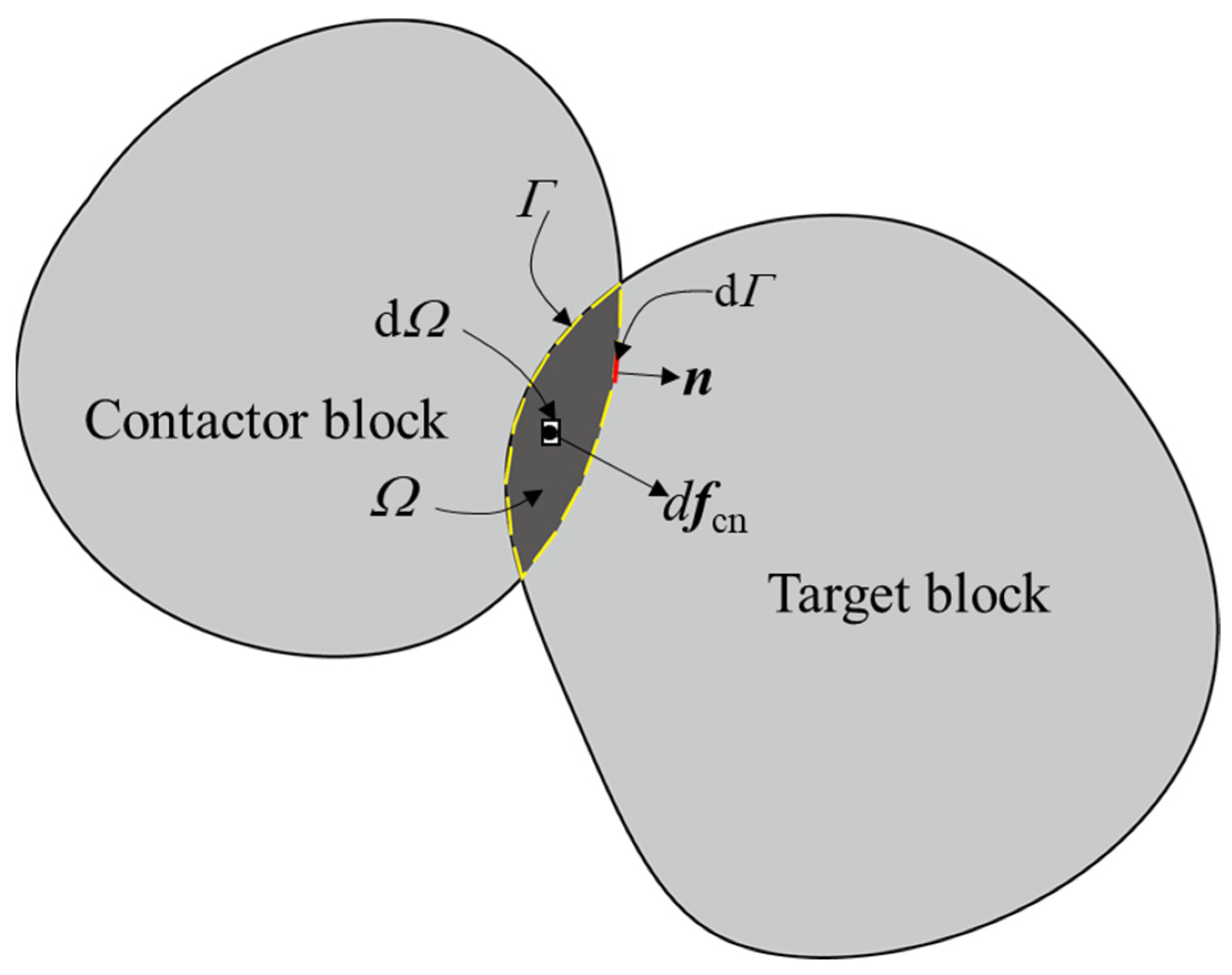
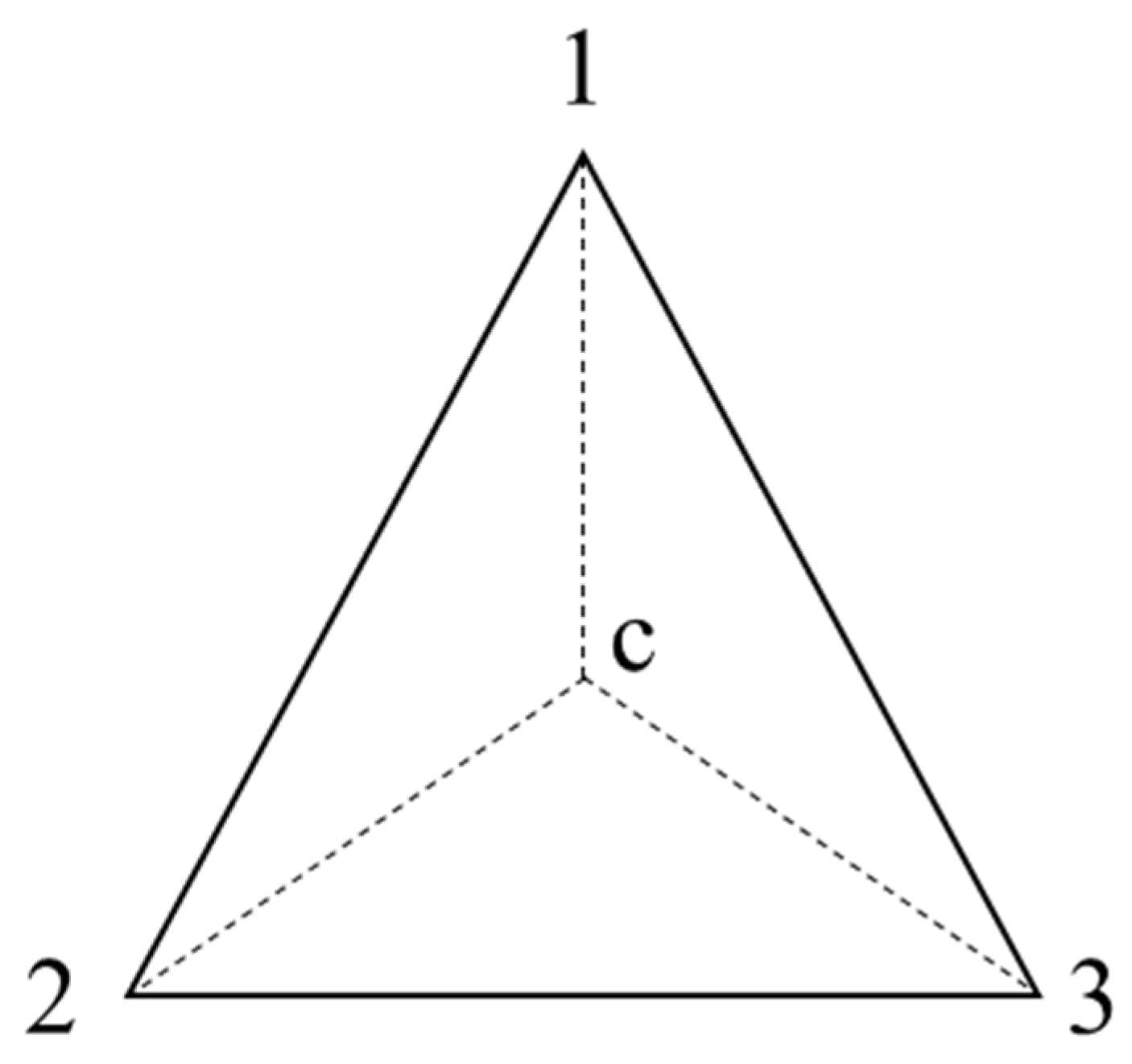
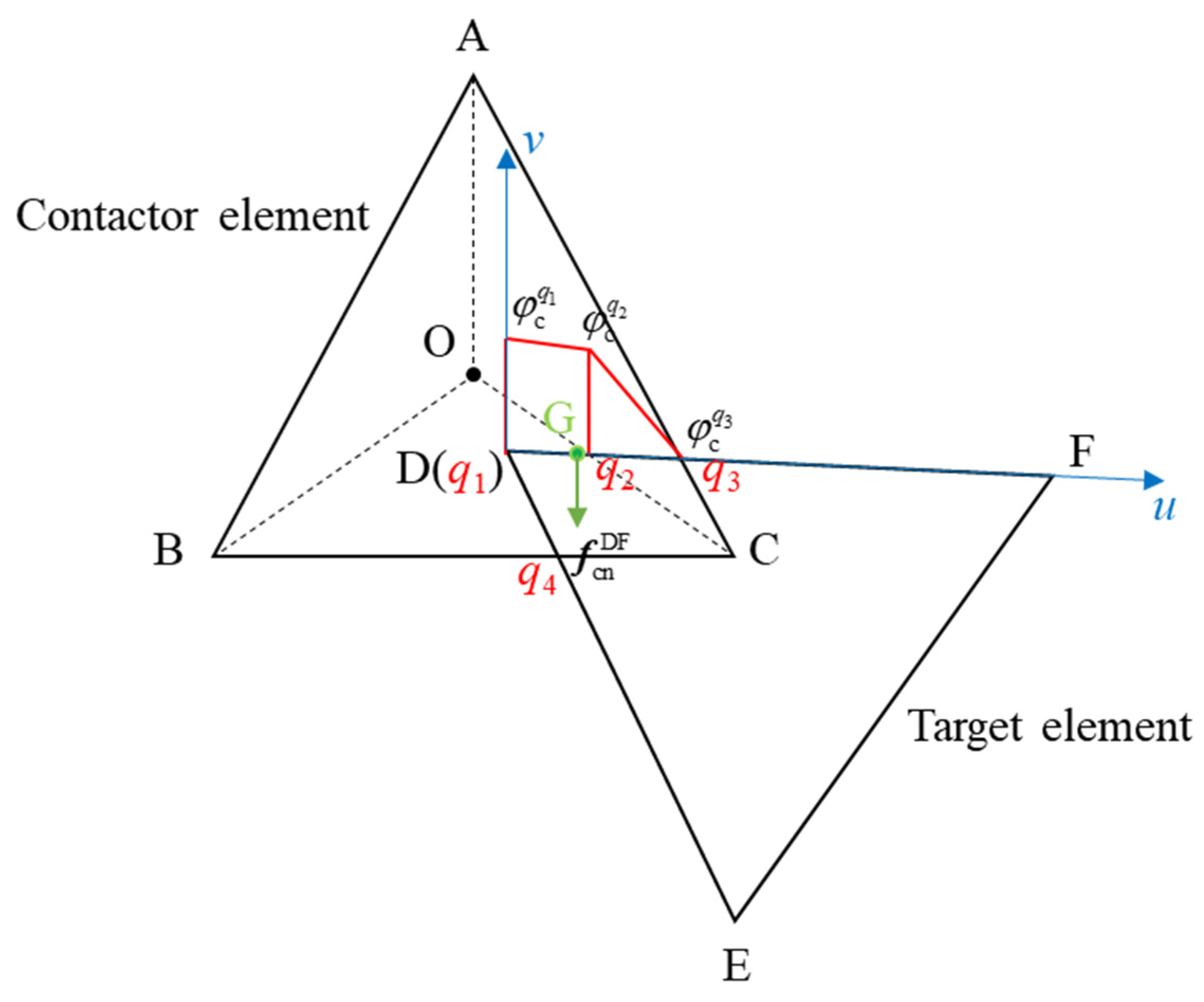
2. FDEM Contact Force Model
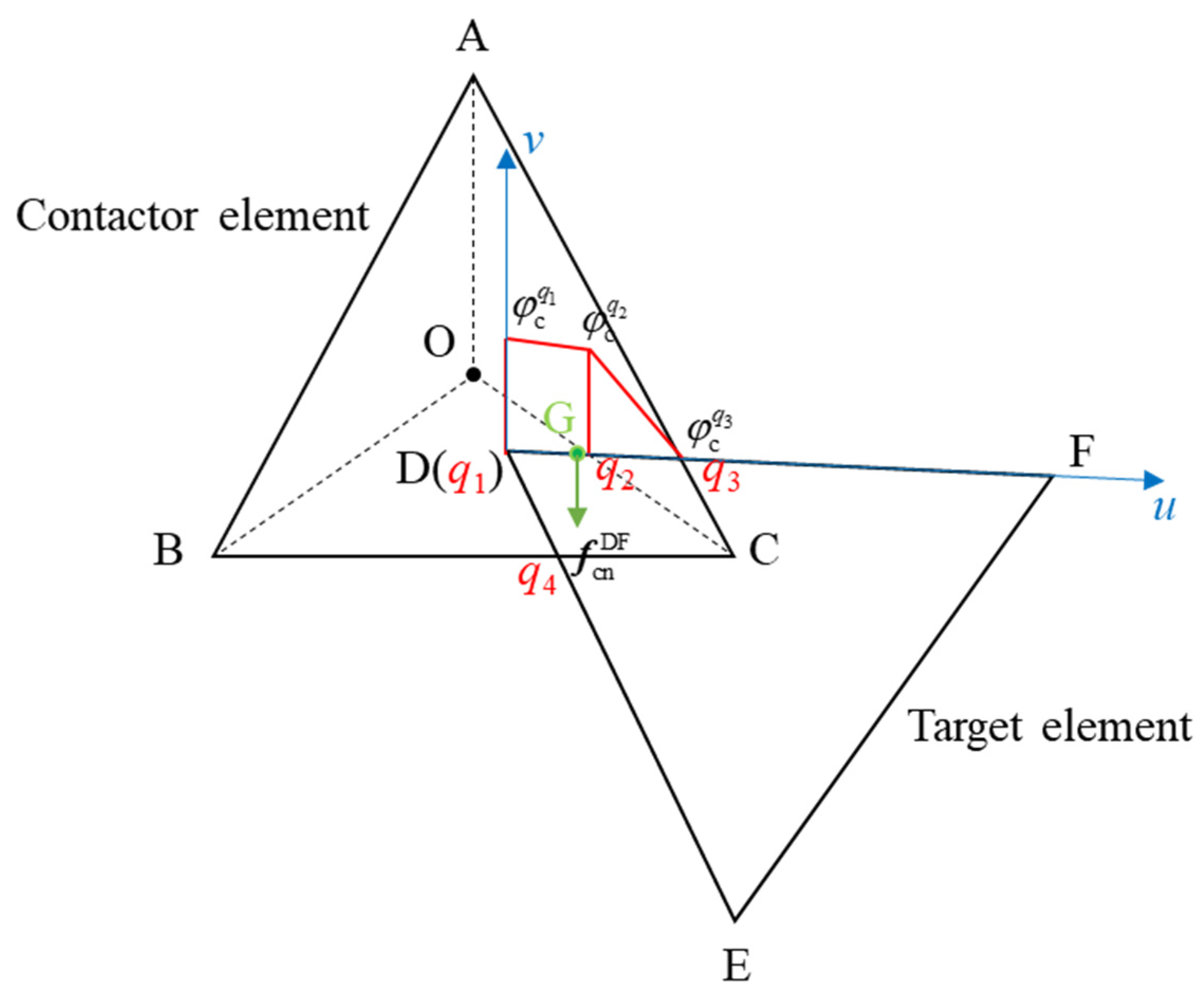
3. Resultant Normal Contact Force Based Contact Friction Algorithm
4. Numerical Examples
4.1. Verification of the Proposed Contact Friction Algorithm
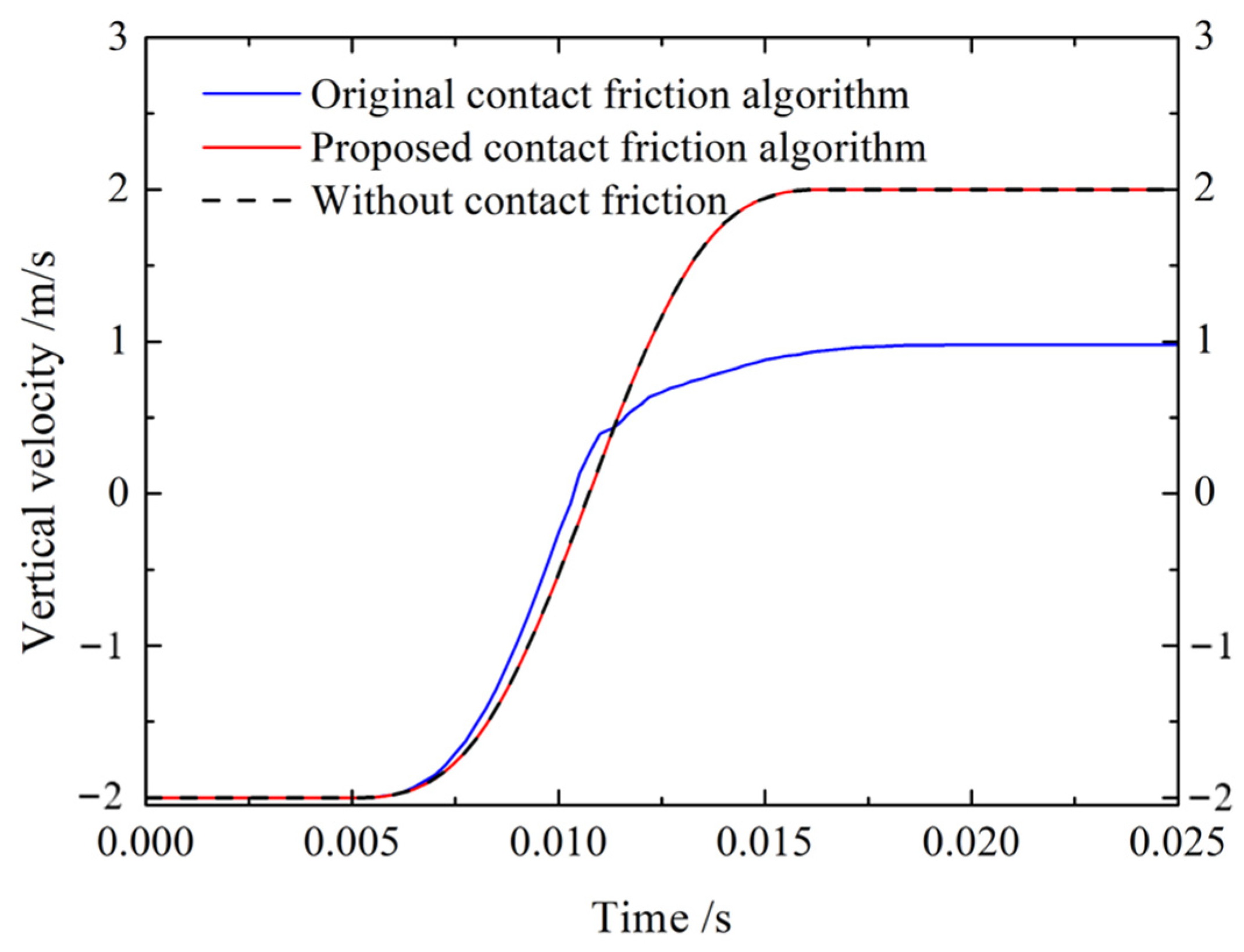
4.1.1. Collision Test
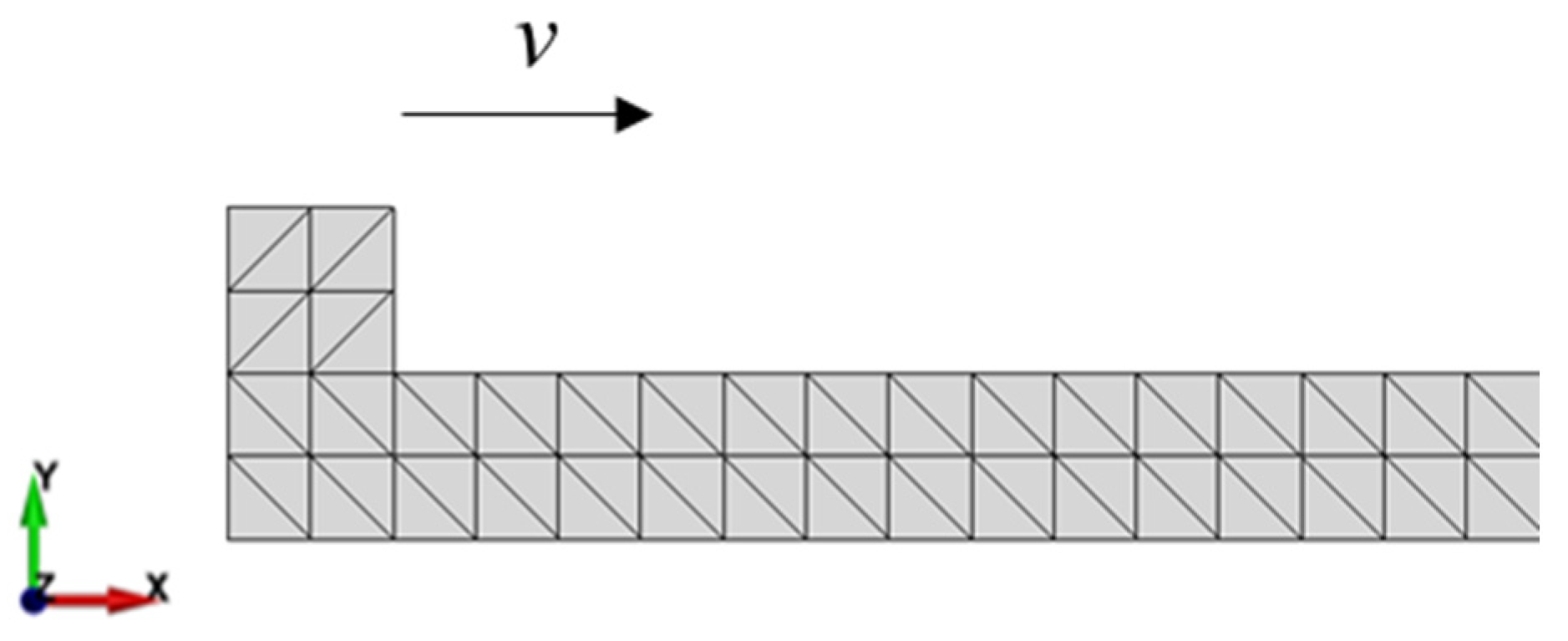
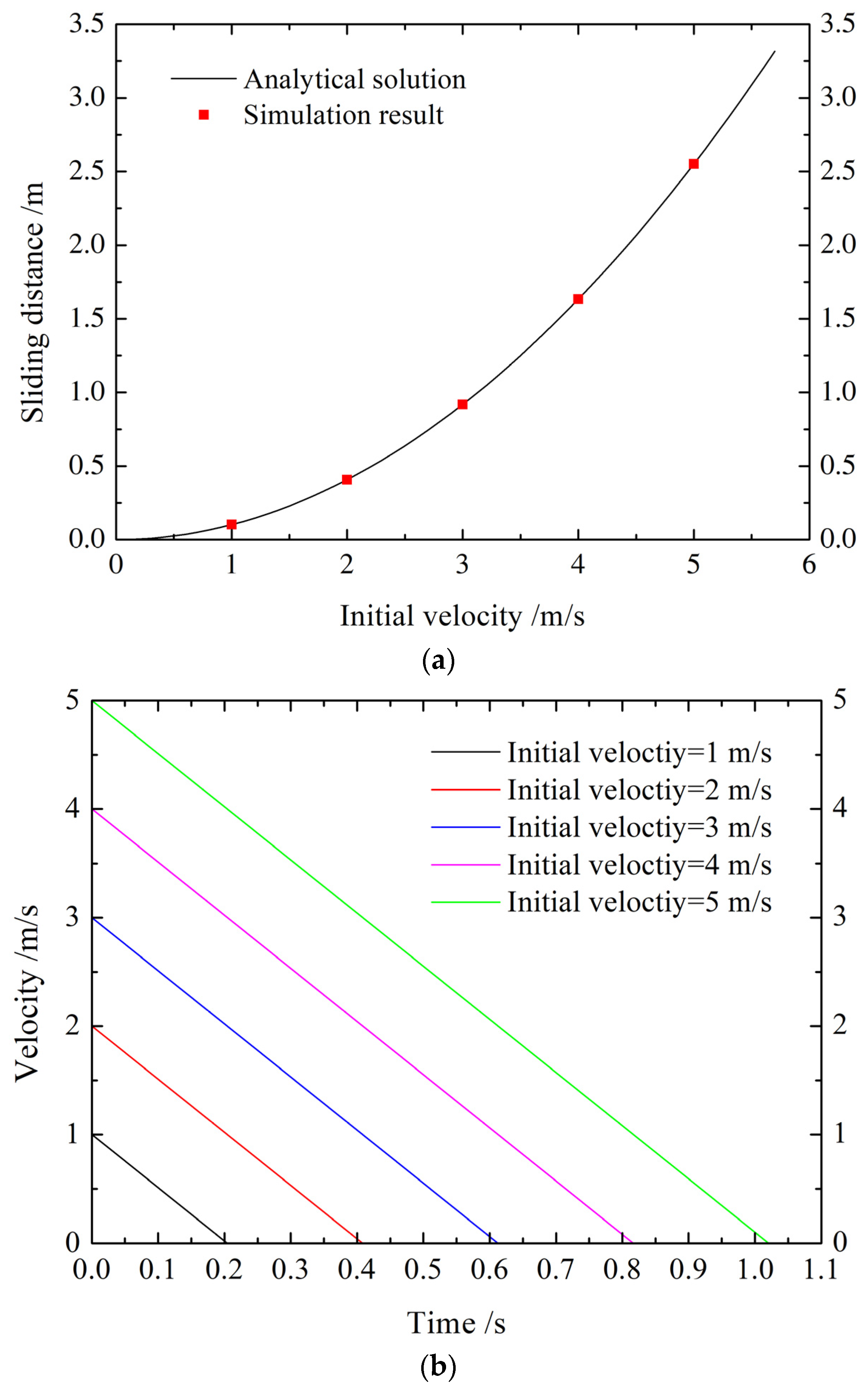
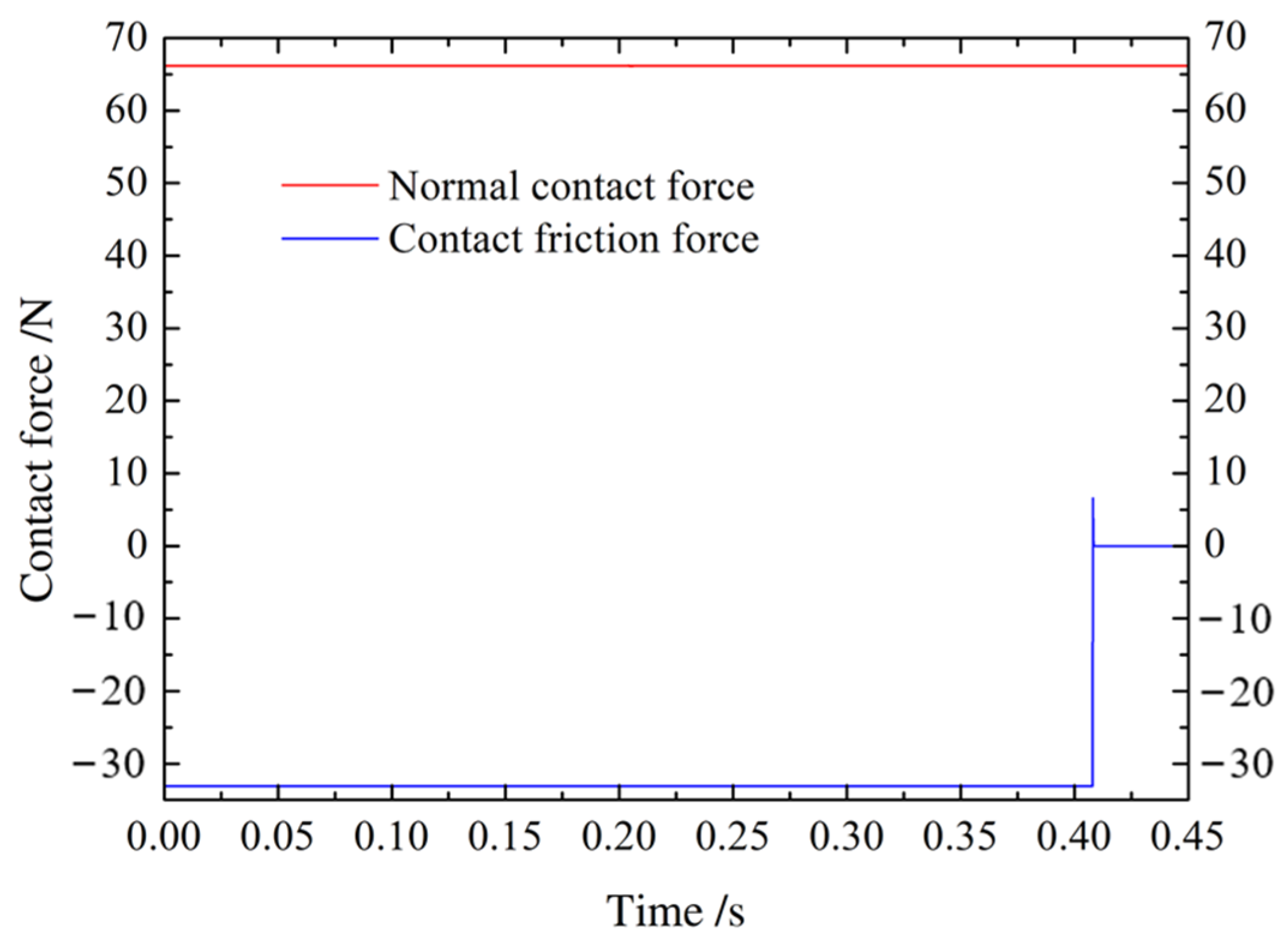
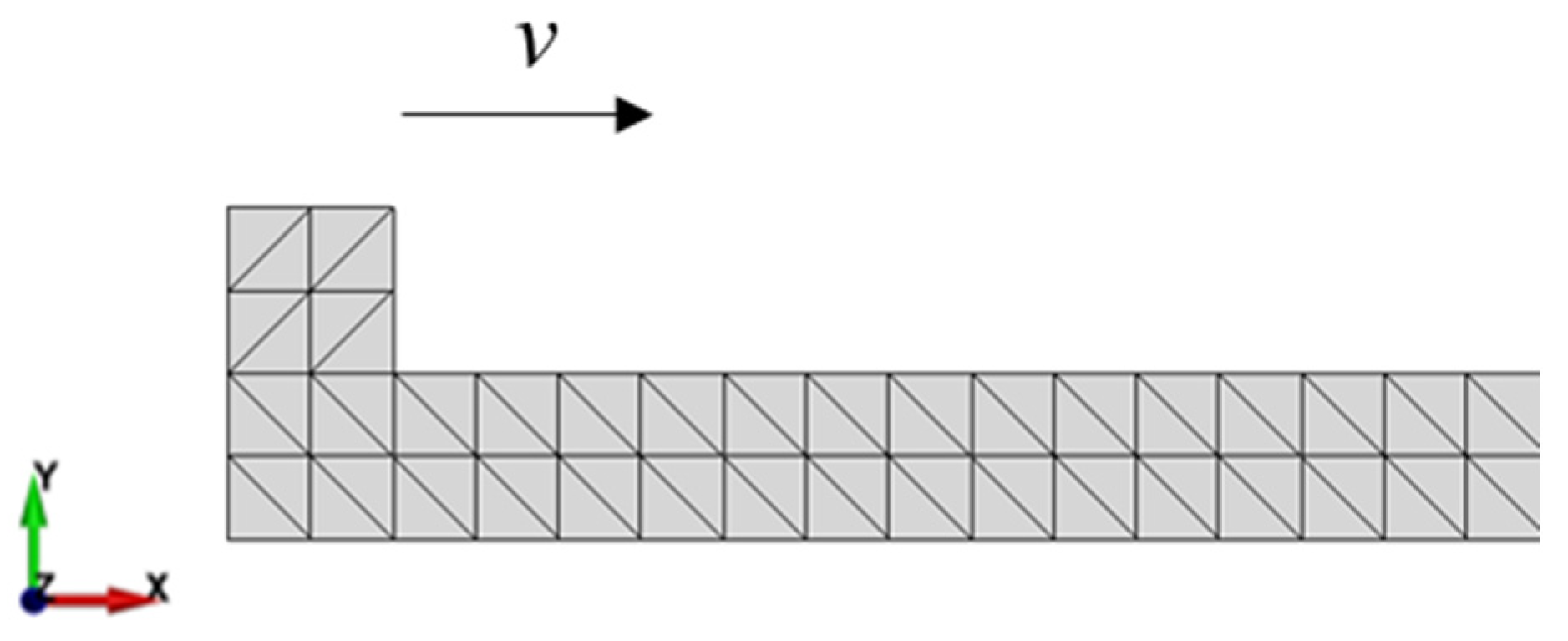
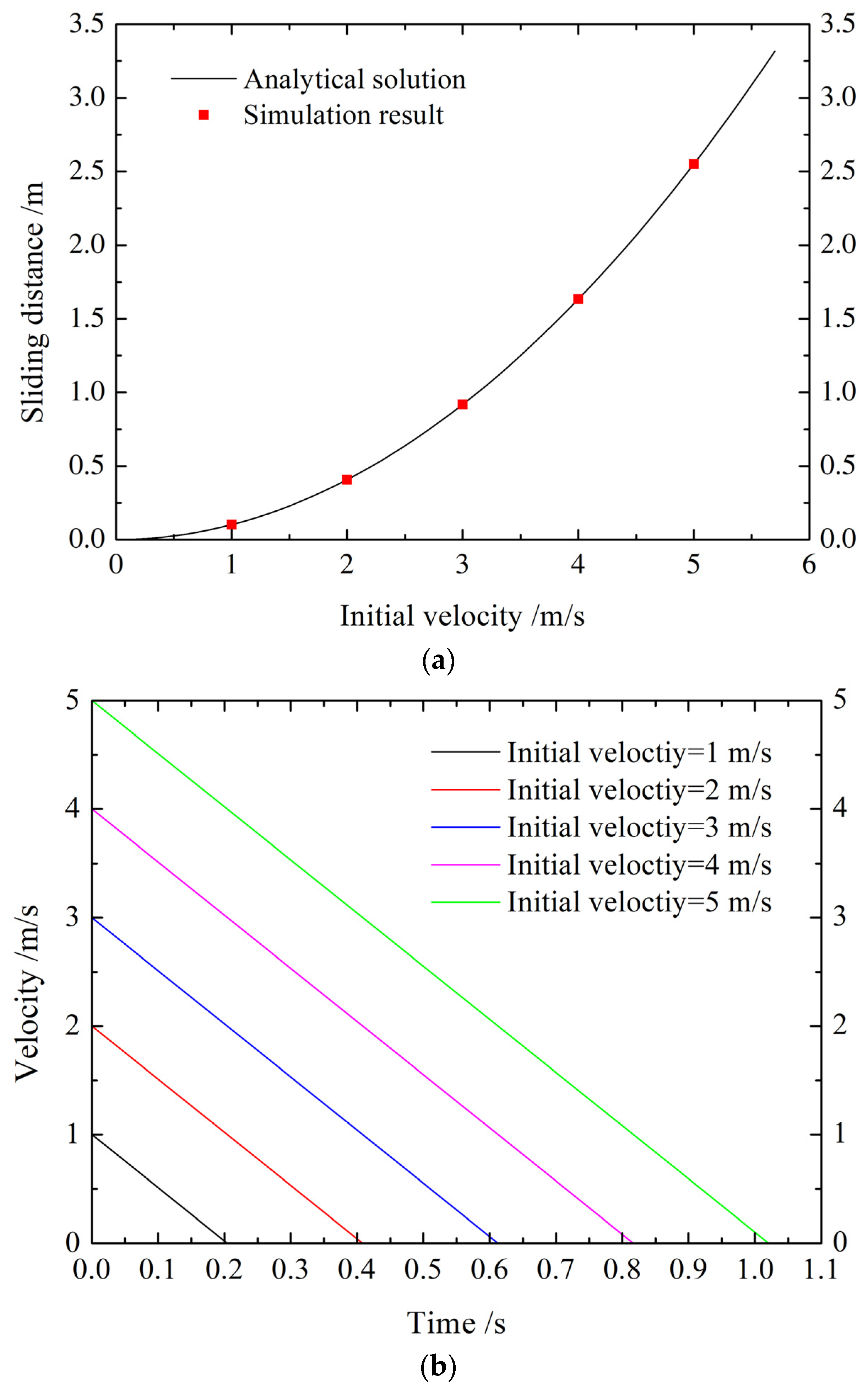
4.1.2. Block Sliding Test
4.2. Validation of the Proposed Algorithm in Fracturing Analysis
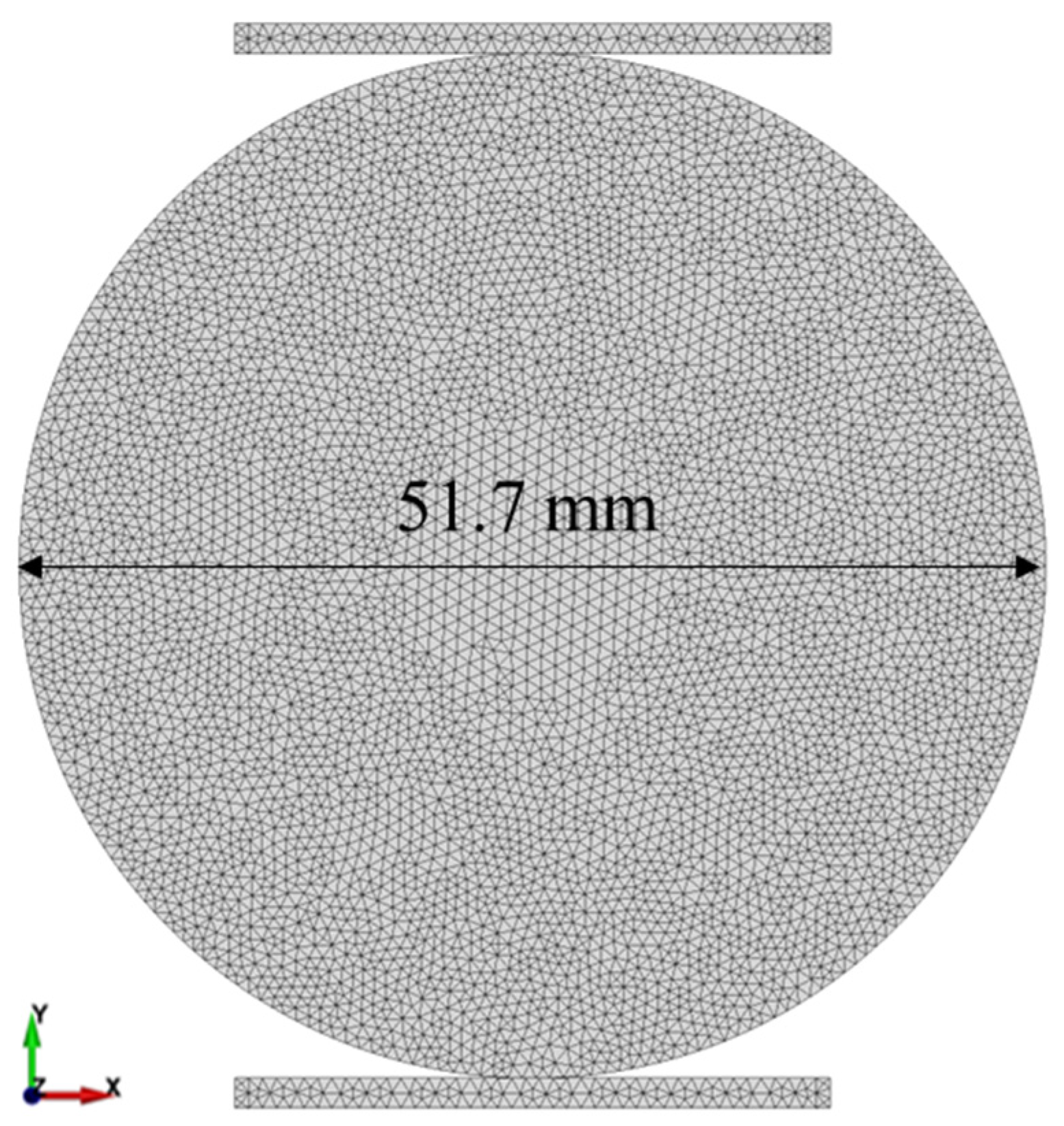
4.2.1. Brazilian Splitting Test
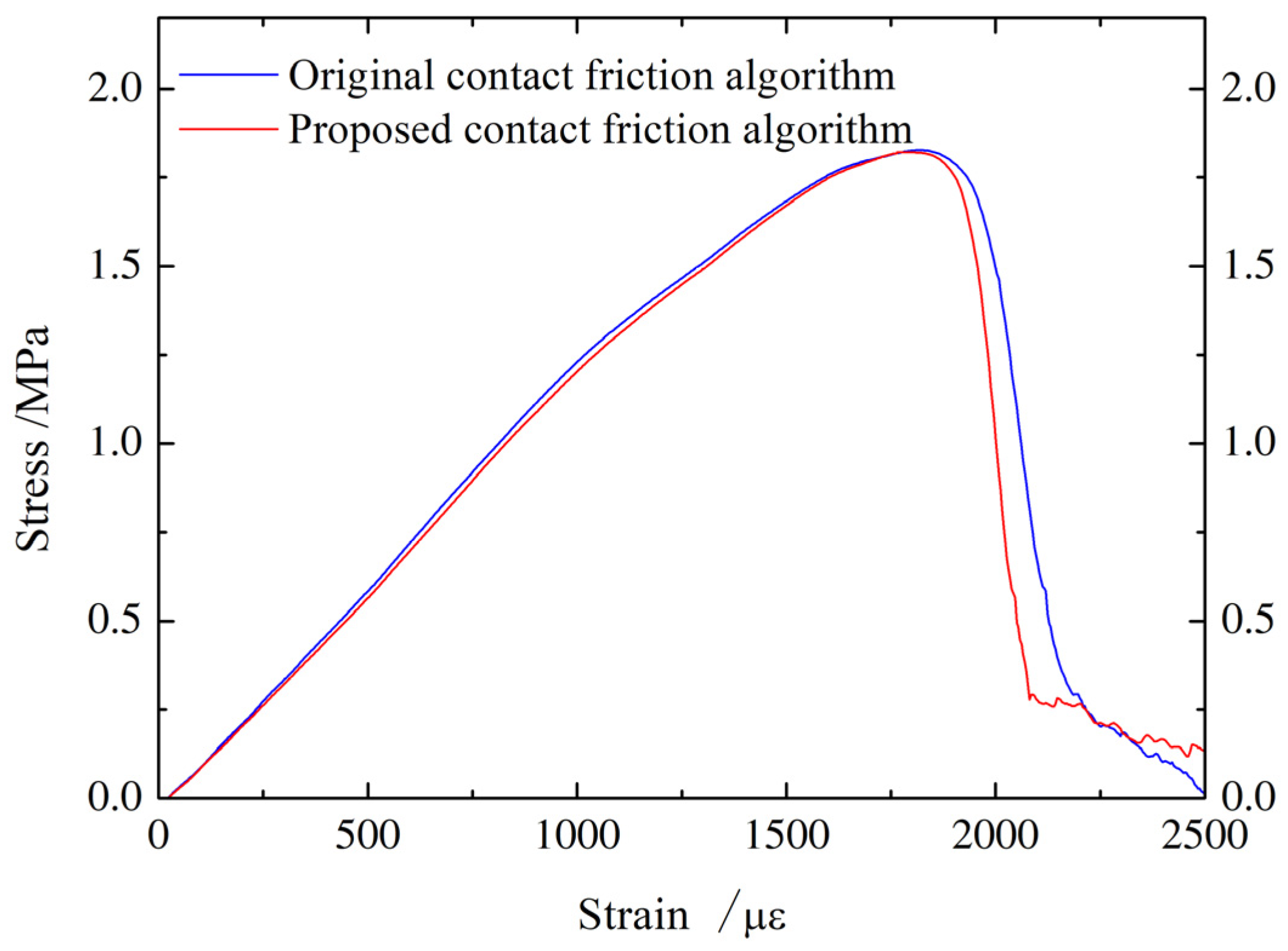
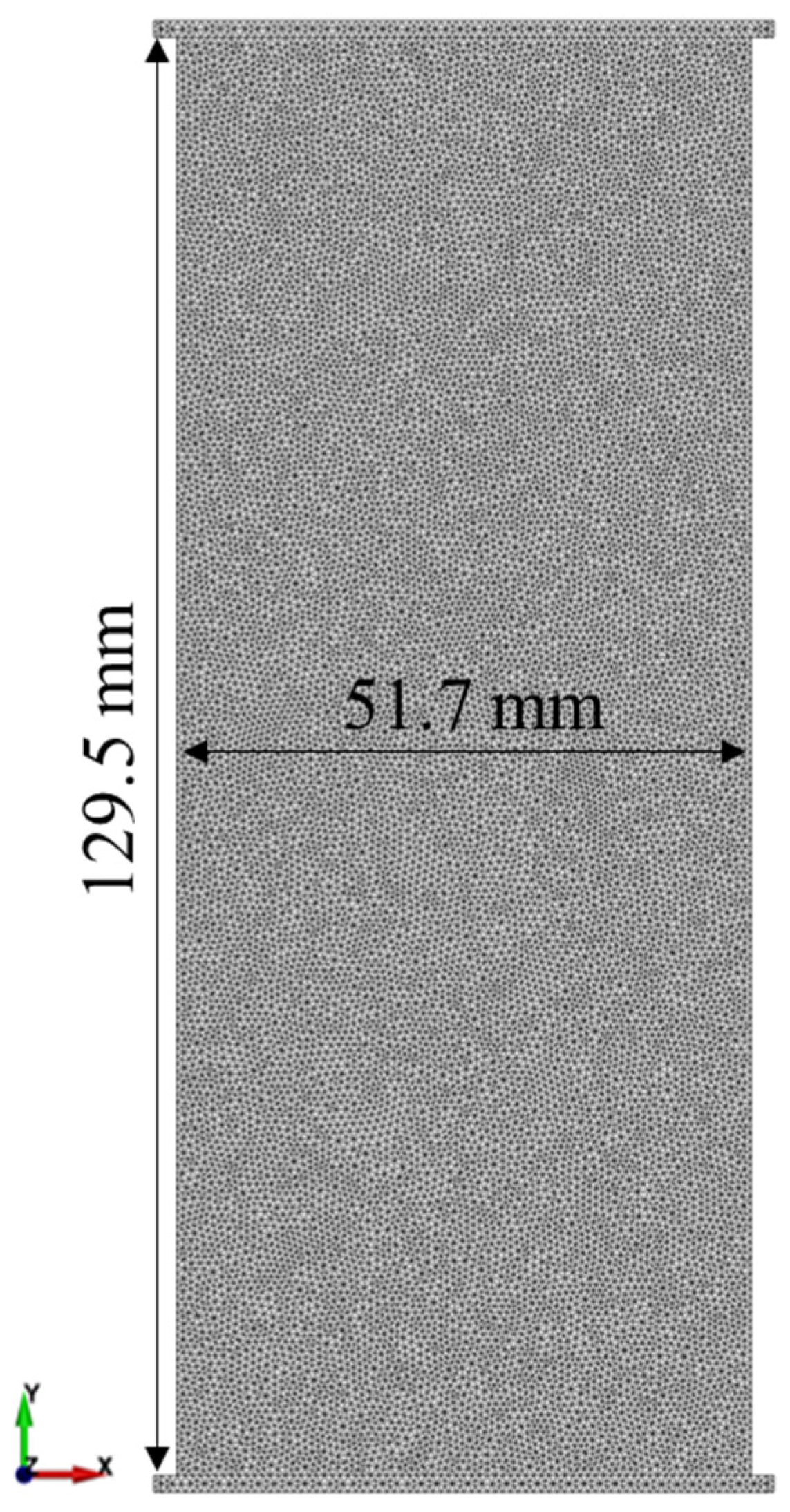
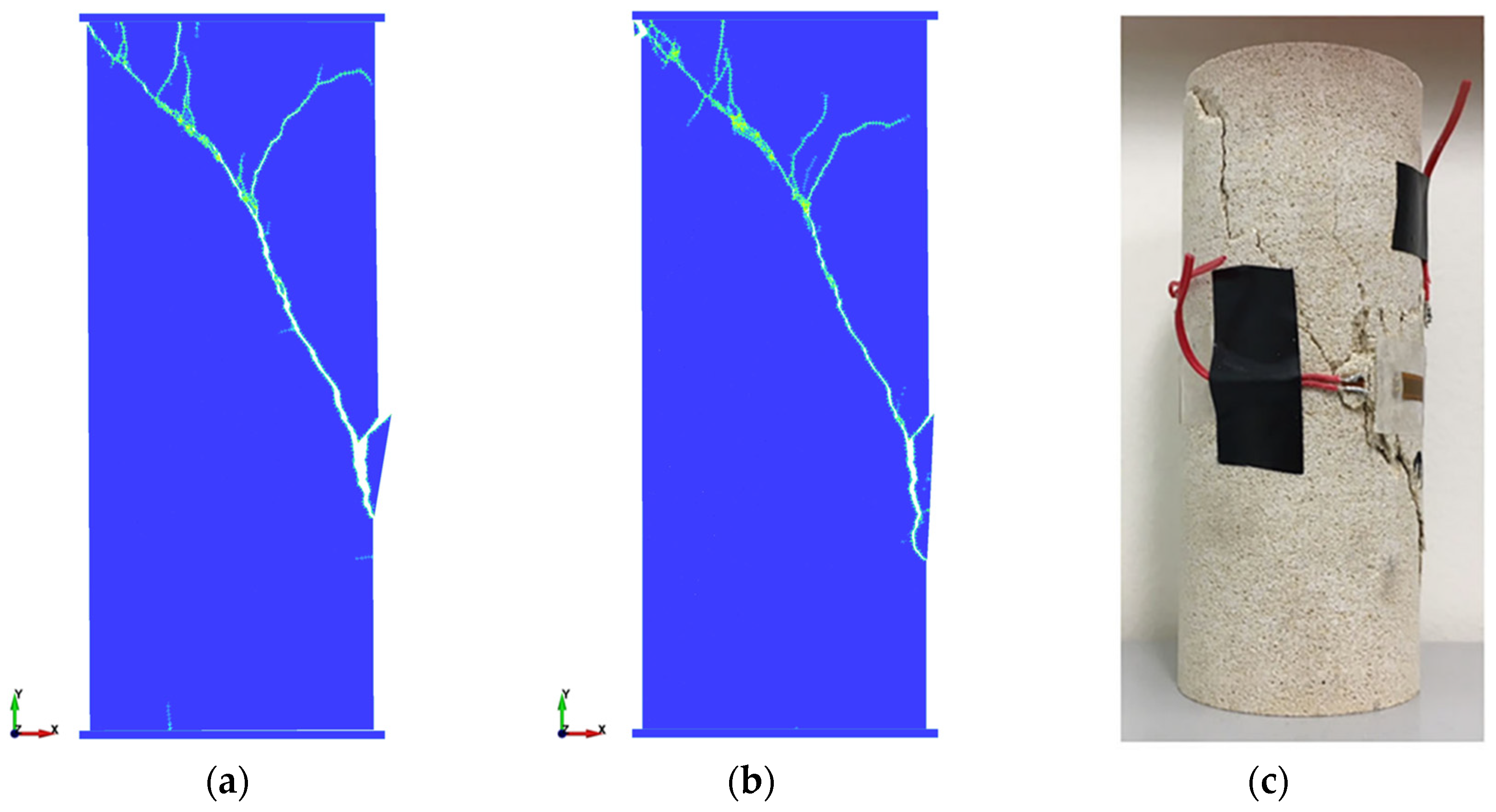
4.2.2. Uniaxial Compression Test
5. Discussion
5.1. Programming Implementation and Memory Consumption
5.2. Calculation Precision
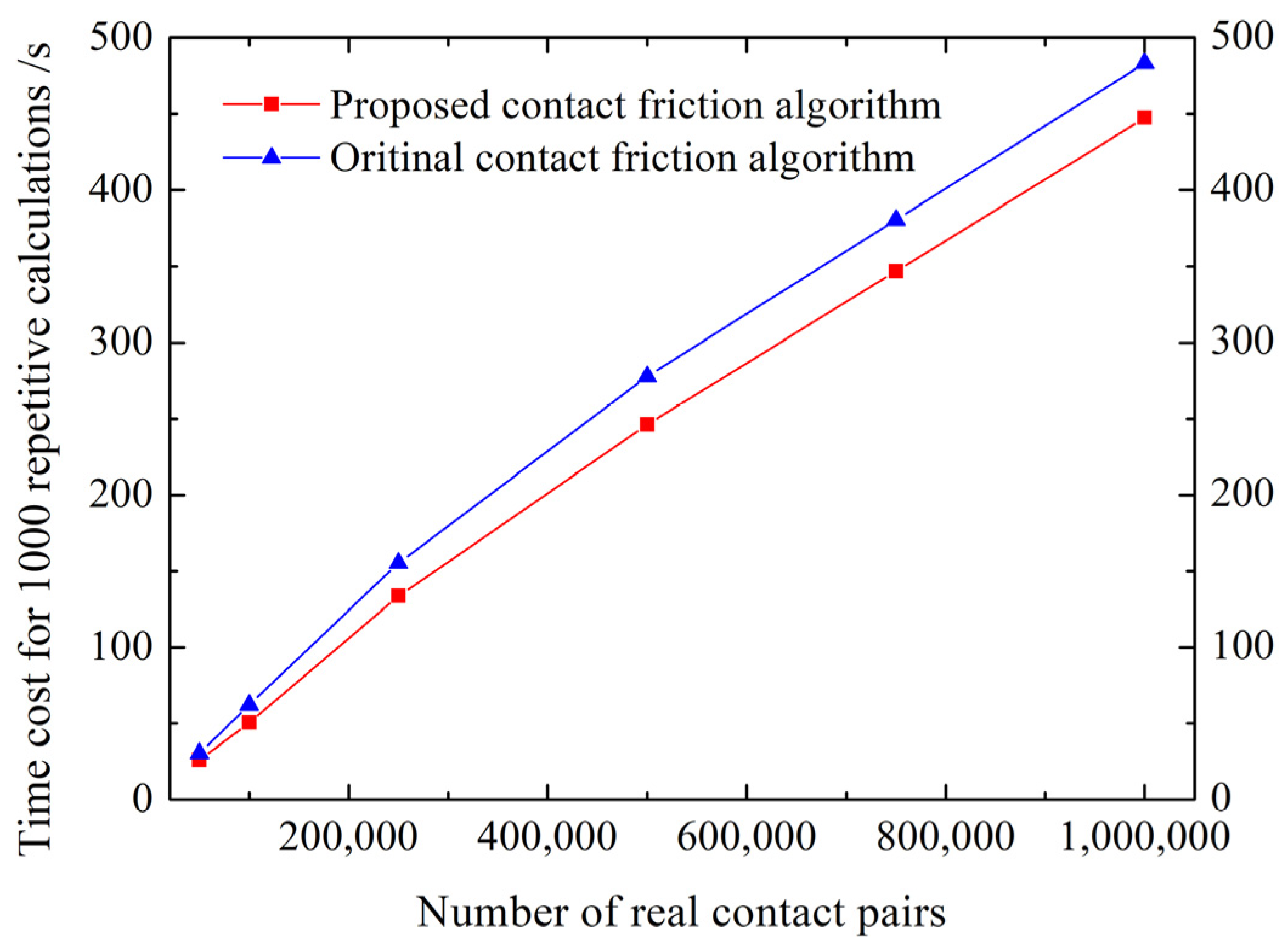
5.3. Computational Efficiency
5.4. Limitations and Future Development
6. Conclusions
- (1)
- The proposed contact friction algorithm accurately captures the frictional effect between discrete bodies, and the simulated velocity, displacement, and normal and tangential friction force agree well with analytical solutions. Moreover, this algorithm addresses the problematic kinetic energy dissipation issue observed in the original contact friction algorithm.
- (2)
- In both the Brazilian splitting and uniaxial compression tests, the fracture patterns and stress–strain responses produced using the proposed contact friction algorithm closely match those obtained using the original algorithm. Furthermore, the uniaxial compression simulation results align well with experimental data, highlighting the reliability of the proposed algorithm in fracturing analysis.
- (3)
- In the computational efficiency analysis, an improvement of 8% in computational efficiency for contact force evaluation is achieved by using the proposed contact friction algorithm. Overall, compared with the original contact friction algorithm, the proposed method offers greater computational efficiency and accuracy, consumes less memory, and presents a more straightforward implementation. Extending this method to other polygonal particles and 3D scenarios will be a focal point for future research.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moës, N.; Belytschko, T. Extended finite element method for cohesive crack growth. Eng. Fract. Mech. 2002, 69, 813–833. [Google Scholar] [CrossRef]
- Wen, P.H. The elastic solution of concentrated force acting in orthogonal anisotropic half-plane and constant element fundamental formulae of boundary element method. Appl. Math. Mech. 1992, 13, 1163–1172. [Google Scholar]
- Chen, H.H.; Zhu, H.H.; Zhang, L.Y. Rock slope stability analysis incorporating the effects of intermediate principal stress. Rock Mech. Rock Eng. 2023, 56, 4271–4289. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. Discussion: A discrete numerical model for granular assemblies. Géotechnique 1980, 30, 331–336. [Google Scholar] [CrossRef]
- Cundall, P.A. Formulation of a three-dimensional distinct element model–part I: A scheme to detect and represent contacts in a system composed of many polyhedral blocks. Int. J. Rock Mech. Min. Sci. 1988, 25, 107–116. [Google Scholar] [CrossRef]
- Huang, L.K.; Liu, J.J.; Zhang, F.S.; Donstov, E.; Damjanac, B. Exploring the influence of rock inherent heterogeneity and grain size on hydraulic fracturing using discrete element modeling. Int. J. Solids Struct. 2019, 176, 207–220. [Google Scholar] [CrossRef]
- Yang, Y.T.; Wu, W.A.; Zheng, H. An Uzawa-type augmented Lagrangian numerical manifold method for frictional discontinuities in rock masses. Int. J. Rock Mech. Min. Sci. 2021, 148, 104970. [Google Scholar]
- Xu, D.D.; Wu, A.Q.; Yang, Y.T.; Lu, B.; Liu, F.; Zheng, H. A new contact potential based three-dimensional discontinuous deformation analysis method. Int. J. Rock Mech. Min. Sci. 2020, 127, 104206. [Google Scholar]
- Yao, W.W.; Zhou, X.P. Meshless numerical solution for nonlocal integral differentiation equation with application in peridynamics. Eng. Anal. Bound Elem. 2022, 144, 569–582. [Google Scholar]
- Yang, L.; Yang, Y.T.; Zheng, H.; Wu, Z.J. An explicit representation of cracks in the variational phase field method for brittle fractures. Comput. Methods Appl. Mech. Eng. 2021, 387, 114127. [Google Scholar]
- Shao, Z.L.; Sun, L.; Aboayanah, K.R.; Liu, Q.S.; Grasselli, G. Investigate the mode I fracture characteristics of granite after heating/-LN2 cooling treatments. Rock Mech. Rock Eng. 2022, 55, 4477–4496. [Google Scholar]
- Zhao, G.F.; Rui, F.X.; Chen, H.; Li, Q. Parallel implementation of the four-dimensional lattice spring model on heterogeneous CPU-GPU systems. Int. J. Rock Mech. Min. Sci. 2020, 133, 1043. [Google Scholar] [CrossRef]
- Farrukh, M.; Ali, J.; Jing, T.X.; Aamer, S.; Mohtashim, M.; Adnan, M.; Syed, I.A.S.; Kamran, A. On the meshfree particle methods for fluid-structure interaction problems. Eng. Anal. Bound Elem. 2021, 124, 14–40. [Google Scholar]
- Guilkey, J.; Alsolaiman, O.; Lander, R.; Bonnell, L.; Cook, J. Cohesive zones to model bonding in granular material with the material point method. Comput. Methods Appl. Mech. Eng. 2023, 415, 116260. [Google Scholar] [CrossRef]
- Liu, H.; Liu, Q.S.; Ma, H.; Fish, J. A novel GPGPU-parallelized contact detection algorithm for combined finite-discrete element method. Int. J. Rock Mech. Min. Sci. 2021, 144, 104782. [Google Scholar]
- Fukuda, D.; Mohammadnejad, M.; Liu, H.Y.; Zhang, Q.B.; Zhao, J.; Dehkhoda, S.; Chan, A.; Kodama, J.I.; Fujii, Y. Development of a 3D hybrid finite-discrete element simulator based on GPGPU-parallelized computation for modelling rock fracturing under quasi-static and dynamic loading conditions. Rock Mech. Rock Eng. 2020, 53, 1079–1112. [Google Scholar]
- Antolini, F.; Barla, M.; Gigli, G.; Giorgetti, A.; Intrieri, E.; Casagli, N. Combined finite–discrete numerical modelling of runout of the Torgiovannetto di Assisi rockslide in central Italy. Int. J. Geomech. 2016, 16, 04016019. [Google Scholar] [CrossRef]
- Xu, C.Y.; Liu, Q.S.; Tang, X.H.; Sun, L.; Deng, P.H.; Liu, H. Dynamic stability analysis of jointed rock slopes using the combined finite-discrete element method (FDEM). Comput. Geotech. 2023, 160, 105556. [Google Scholar] [CrossRef]
- Lei, Q.H.; Latham, J.P.; Xiang, J.S.; Tsang, C.F. Role of natural fractures in damage evolution around tunnel excavation in fractured rocks. Eng. Geol. 2017, 231, 100–113. [Google Scholar]
- Vazaios, I.; Vlachopoulos, N.; Diederichs, M.S. Assessing fracturing mechanisms and evolution of excavation damaged zone of tunnels in interlocked rock masses at high stresses using a finite-discrete element approach. J. Rock. Mech. Geotech. Eng. 2019, 11, 701–722. [Google Scholar] [CrossRef]
- Xia, K.Z.; Chen, C.X.; Liu, X.T.; Liu, X.M.; Yuan, J.H.; Dang, S. Assessing the stability of high-level pillars in deeply-buried metal mines stabilized using cemented backfill. Int. J. Rock Mech. Min. Sci. 2023, 170, 105489. [Google Scholar]
- Klinger, Y.; Okubo, K.; Vallage, A.; Champenois, J.; Delorme, A.; Rougier, E.; Lei, Z.; Knight, E.E.; Munjiza, A.; Satriano, C.; et al. Earthquake damage patterns resolve complex rupture processes. Geophys. Res. Lett. 2018, 45, 10279–10287. [Google Scholar] [CrossRef]
- Okubo, K.; Rougier, E.; Lei, Z.; Bhat, H.S. Modelling earthquakes with off-fault damage using the combined finite-discrete element method. Comput. Part Mech. 2020, 7, 1057–1072. [Google Scholar] [CrossRef]
- Munjiza, A.; Andrews, K.R.F. Penalty function method for combined finite–discrete element systems comprising large number of separate bodies. Int. J. Numer. Methods Eng. 2000, 49, 1377–1396. [Google Scholar] [CrossRef]
- Munjiza, A.; Knight, E.E.; Rougier, E. Computational Mechanics of Discontinua; Wiley: London, UK, 2011. [Google Scholar]
- Yan, C.; Zheng, H. A new potential function for the calculation of contact forces in the combined finite–discrete element method. Int. J. Numer. Anal. Meth. Geomech. 2017, 41, 265–283. [Google Scholar] [CrossRef]
- Zhao, L.H.; Liu, X.N.; Mao, J.; Xu, D.; Munjiza, A.; Avital, E. A novel discrete element method based on the distance potential for arbitrary 2D convex elements. Int. J. Numer. Meth. Eng. 2018, 115, 238–267. [Google Scholar] [CrossRef]
- Lei, Z.; Rougier, E.; Euser, B.; Munjiza, A. A smooth contact algorithm for the combined finite discrete element method. Comput. Part Mech. 2020, 7, 807–821. [Google Scholar] [CrossRef]
- Xiang, J.; Munjiza, A.; Latham, J.P.; Guises, R. On the validation of DEM and FEM/DEM models in 2D and 3D. Eng. Comput. 2009, 26, 673–687. [Google Scholar] [CrossRef]
- Liu, H.; Ma, H.; Liu, Q.S.; Fish, J. An efficient and robust GPGPU-parallelized contact algorithm for the combined finite-discrete element method. Comput. Methods Appl. Mech. Eng. 2022, 395, 114981. [Google Scholar]
- Munjiza, A. The Combined Finite-Discrete Element Method; Wiley: London, UK, 2004. [Google Scholar]
- Mohammadnejad, M.; Dehkhoda, S.; Fukuda, D.; Liu, H.Y.; Chan, A. GPGPU-parallelised hybrid finite-discrete element modelling of rock chipping and fragmentation process in mechanical cutting. J. Rock Mech. Geotech. Eng. 2020, 12, 310–325. [Google Scholar]
- Fukuda, D.; Mohammadnejad, M.; Liu, H.Y.; Dehkhoda, S.; Chan, A.; Cho, S.H.; Min, G.J.; Han, H.Y.; Kodama, J.I.; Fujii, Y. Development of a GPGPU-parallelized hybrid finite-discrete element method for modeling rock fracture. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 1797–1824. [Google Scholar] [CrossRef]
- Mahabadi, O.K.; Tatone, B.S.A.; Grasselli, G. Influence of microscale heterogeneity and microstructure on the tensile behavior of crystalline rocks. J. Geophys. Res. Solid Earth. 2014, 119, 5324–5341. [Google Scholar] [CrossRef]
- Yan, C.Z.; Tong, Y. Calibration of microscopic penalty parameters in the combined finite-discrete element method. Int. J. Geomech. 2020, 20, 04020092. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Value |
|---|---|---|
| Density | kg/m3 | 2700 |
| Yong’s modulus | GPa | 12.2 |
| Poisson’s ratio | - | 0.25 |
| Cohesion | GPa | 5 |
| Tensile strength | GPa | 1.77 |
| Internal friction angle | ° | 25 |
| Mode Ι fracture energy | J/m2 | 16 |
| Mode Ⅱ fracture energy | J/m2 | 160 |
| Normal contact penalty | GPa | 122 |
| Tangential contact penalty | GPa/m | 122 |
| Cohesive element penalty | GPa/m | 1220 |
| Friction coefficient between plate and sample | - | 0.1 |
| Friction coefficient between cracked elements | - | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Shao, Z.; Lin, Q.; Lei, Y.; Du, C.; Pan, Y. Resultant Normal Contact Force-Based Contact Friction Model for the Combined Finite-Discrete Element Method and Its Validation. Mathematics 2023, 11, 4197. https://doi.org/10.3390/math11194197
Liu H, Shao Z, Lin Q, Lei Y, Du C, Pan Y. Resultant Normal Contact Force-Based Contact Friction Model for the Combined Finite-Discrete Element Method and Its Validation. Mathematics. 2023; 11(19):4197. https://doi.org/10.3390/math11194197
Chicago/Turabian StyleLiu, He, Zuliang Shao, Qibin Lin, Yiming Lei, Chenglei Du, and Yucong Pan. 2023. "Resultant Normal Contact Force-Based Contact Friction Model for the Combined Finite-Discrete Element Method and Its Validation" Mathematics 11, no. 19: 4197. https://doi.org/10.3390/math11194197
APA StyleLiu, H., Shao, Z., Lin, Q., Lei, Y., Du, C., & Pan, Y. (2023). Resultant Normal Contact Force-Based Contact Friction Model for the Combined Finite-Discrete Element Method and Its Validation. Mathematics, 11(19), 4197. https://doi.org/10.3390/math11194197