
Adaptive Variable-Damping Impedance Control for Unknown Interaction Environment


 ,
,
Abstract
:1. Introduction
2. Preliminaries
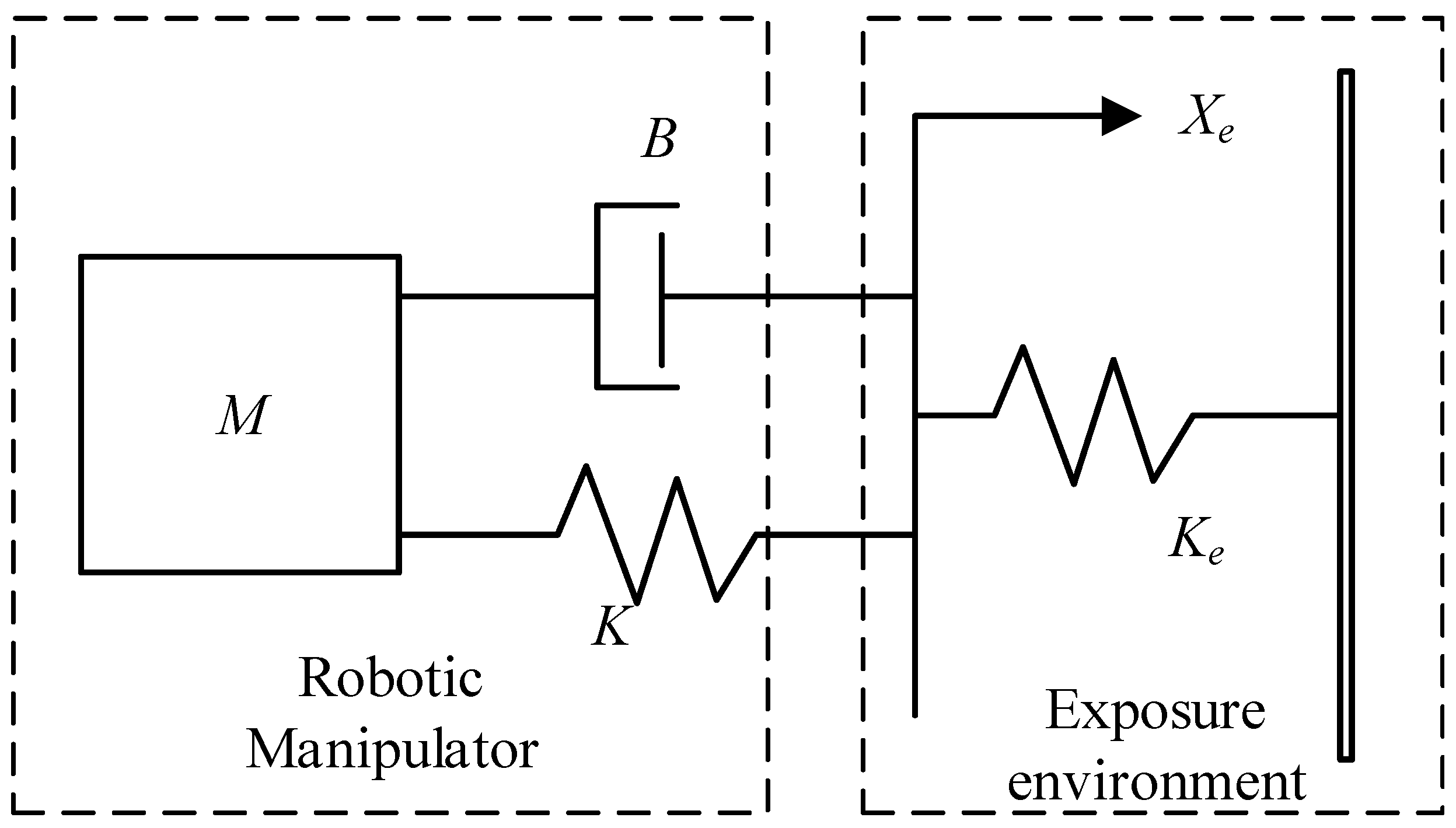
2.1. Impedance Control
2.2. Impedance Control Model Analysis
3. Research on Impedance Control Based on Adaptive Variable Damping Algorithm
3.1. Stability Analysis
3.2. Performance Analysis and Adaptive Law Selection
4. Experiment Validation
4.1. Construction of the Experiment Platform
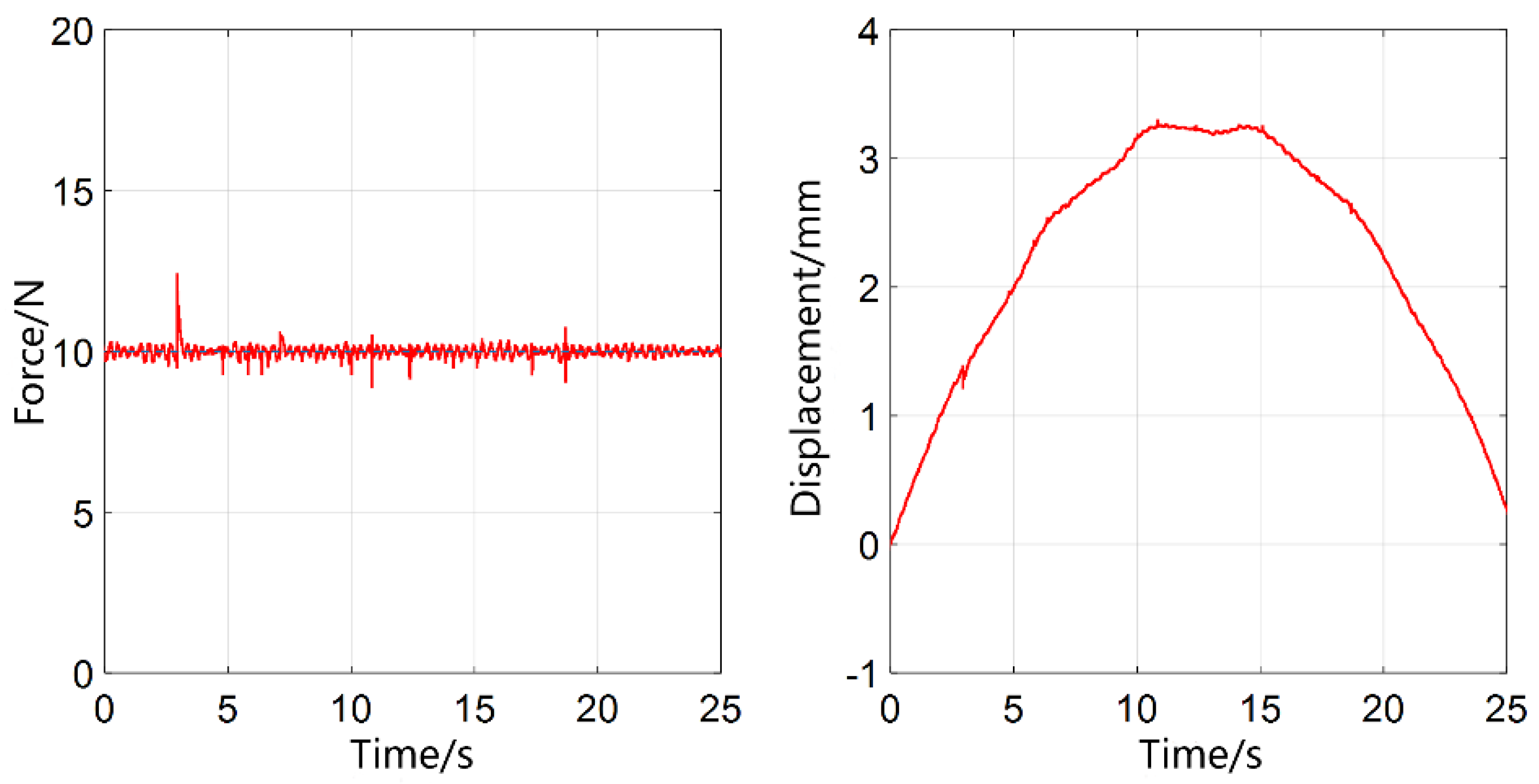
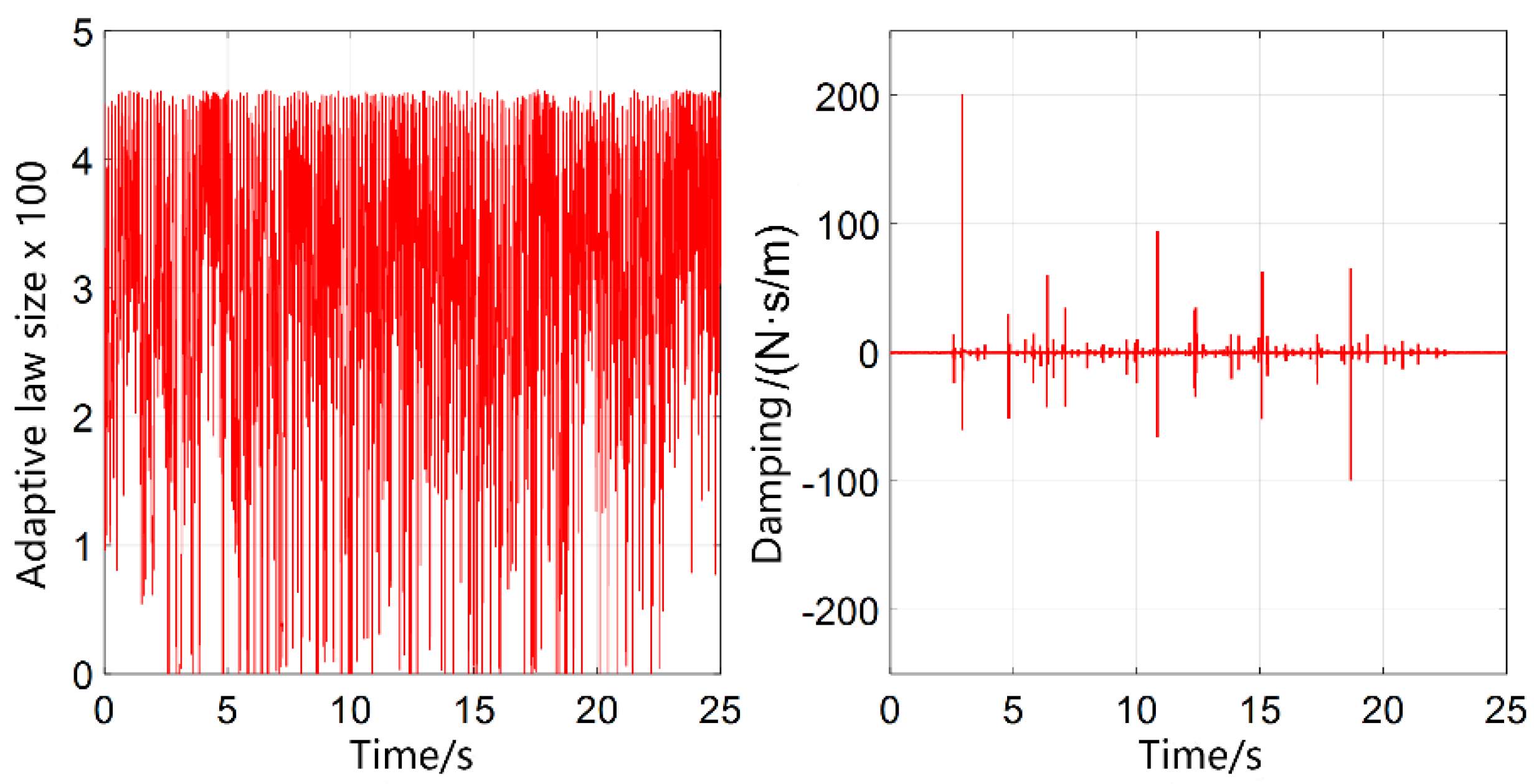
4.2. Experiment Design
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nabat, V.; Rodriguez, M.d.O.; Company, O.; Krut, S.; Pierrot, F. Par4: Very high speed parallel robot for pick-and-place. In Proceedings of the 2005 IEEE International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 553–558. [Google Scholar]
- Yang, G.; Chen, I.M.; Yeo, S.H.; Lin, W. Design and analysis of a modular hybrid parallel-serial manipulator for robotised deburring applications. In Smart Devices and Machines for Advanced Manufacturing; Springer: Berlin/Heidelberg, Germany, 2008; pp. 167–188. [Google Scholar]
- Xu, P.; Li, B.; Chueng, C.F. Dynamic analysis of a linear Delta robot in hybrid polishing machine based on the principle of virtual work. In Proceedings of the 18th International Conference on Advanced Robotics, Hong Kong, China, 10–12 July 2017; pp. 379–384. [Google Scholar]
- Wu, J.; Gao, Y.; Zhang, B.; Wang, L. Workspace and dynamic performance evaluation of the parallel manipulators in a spray-painting equipment. Robot. Comput. Integr. Manuf. 2017, 44, 199–207. [Google Scholar] [CrossRef]
- Cherubini, A.; Navarro-Alarcon, D. Sensor-Based Control for Collaborative Robots: Fundamentals, Challenges, and Opportunities. Front. Neurorobot. 2021, 14, 113. [Google Scholar] [CrossRef]
- Li, T.; Huang, R.; Chen, L.; Jensen, C.S.; Pedersen, T.B. Compression of uncertain trajectories in road networks. Proc. VLDB Endow. 2020, 13, 1050–1063. [Google Scholar] [CrossRef]
- Li, T.; Chen, L.; Jensen, C.S.; Pedersen, T.B. TRACE: Real-time compression of streaming trajectories in road networks. Proc. VLDB Endow. 2021, 14, 1175–1187. [Google Scholar] [CrossRef]
- Li, T.; Chen, L.; Jensen, C.S.; Pedersen, T.B.; Gao, Y.; Hu, J. Evolutionary clustering of moving objects. In Proceedings of the 2022 IEEE 38th International Conference on Data Engineering (ICDE), Kuala Lumpur, Malaysia, 9–12 May 2022; pp. 2399–2411. [Google Scholar]
- Xu, K.; Wang, S.; Yue, B.; Wang, J.; Peng, H.; Liu, D.; Chen, Z.; Shi, M. Adaptive impedance control with variable target stiffness for wheel-legged robot on complex unknown terrain. Mechatronics 2020, 69, 102388. [Google Scholar] [CrossRef]
- Zhu, M.; Briot, S.; Chriette, A. Sensor-based design of a Delta parallel robot. Mechatronics 2022, 87, 102893. [Google Scholar] [CrossRef]
- Zhu, M.; Huang, C.; Qiu, Z.; Zheng, W.; Gong, D. Parallel Image-Based Visual Servoing/Force Control of a Collaborative Delta Robot. Front. Neurorobot. 2022, 16, 922704. [Google Scholar] [CrossRef]
- Prats, M.; Martinet, P.; del Pobil, A.P.; Lee, S. VIsion force control in task-oriented grasping and manipulation. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1320–1325. [Google Scholar] [CrossRef]
- Raibert, M.H.; Craig, J.J. Hybrid position/force control of manipulators. J. Dyn. Syst. Meas. Control 1981, 102, 126–133. [Google Scholar] [CrossRef]
- Baeten, J.; Schutter, J.D. Integrated Visual Servoing and Force Control—The Task Frame Approach; Springer: New York, NY, USA, 2004. [Google Scholar]
- Li, H.; Wang, S.; Shi, H.; Su, C.; Li, P. Two-Dimensional Iterative Learning Robust Asynchronous Switching Predictive Control for Multiphase Batch Processes With Time-Varying Delays. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 6488–6502. [Google Scholar] [CrossRef]
- Liu, Z.; Sun, Y. Adaptive variable impedance control with fuzzy-pi compound controller for robot trimming system. Arab. J. Sci. Eng. 2022, 47, 15727–15740. [Google Scholar] [CrossRef]
- Zhu, Y.; Qiao, J.; Lei, G. Adaptive Sliding Mode Disturbance Observer-Based Composite Control With Prescribed Performance of Space Manipulators for Target Capturing. IEEE Trans. Ind. Electron. 2018, 66, 1973–1983. [Google Scholar] [CrossRef]
- Wei, D.; Li, Z.; Wei, Q.; Su, H.; Song, B.; He, W.; Li, J. Human-in-the-loop control strategy of unilateral exoskeleton robots for gait rehabilitation. IEEE Trans. Cogn. Dev. Syst. 2019, 13, 57–66. [Google Scholar] [CrossRef]
- Wang, S.; Li, H.; Li, H.; Shi, H.; Sun, Q.; Li, P. Robust dynamic output feedback predictive control for discrete uncertain systems with time-varying delays. Trans. Inst. Meas. Control 2023. [Google Scholar] [CrossRef]
- He, W.; Dong, Y.; Sun, C. Adaptive Neural Impedance Control of a Robotic Manipulator With Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 46, 334–344. [Google Scholar] [CrossRef]
- Li, Y.; Li, T.; Gui, Y.; Gao, D.W.; Zhang, Y. Controllable Structure Planning for Energy Internet. In Proceedings of the 2022 First International Conference on Cyber-Energy Systems and Intelligent Energy (ICCSIE), Shenyang, China, 14–15 January 2023; pp. 1–6. [Google Scholar]
- Dai, X.; Song, S.; Xu, W.; Huang, Z.; Gong, D. Modal space neural network compensation control for Gough-Stewart robot with uncertain load. Neurocomputing 2021, 449, 245–257. [Google Scholar] [CrossRef]
- Li, Z.; Cao, H. Robot impedance control method adapting to unknown or changing environment stiffness and damping parameters. China Mech. Eng. 2014, 25, 1581. [Google Scholar]
- Deng, Y.; Léchappé, V.; Zhang, C.; Moulay, E.; Du, D.; Plestan, F.; Han, Q.L. Designing Discrete Predictor-Based Controllers for Networked Control Systems with Time-varying Delays: Application to A Visual Servo Inverted Pendulum System. IEEE/CAA J. Autom. Sin. 2022, 9, 1763–1777. [Google Scholar] [CrossRef]
- Zhu, M.; Huang, C.; Song, S.; Xu, S.; Gong, D. Vision-admittance-based adaptive RBFNN control with a SMC robust compensator for collaborative parallel robots. J. Frankl. Inst. 2023. [Google Scholar] [CrossRef]
- Jung, S.; Hsia, T.C.; Bonitz, R.G. Force tracking impedance control of robot manipulators under unknown environment. IEEE Trans. Control Syst. Technol. 2004, 12, 474–483. [Google Scholar] [CrossRef]
- Cao, H.; Chen, X.; He, Y.; Zhao, X. Dynamic adaptive hybrid impedance control for dynamic contact force tracking in uncertain environments. IEEE Access 2019, 7, 83162–83174. [Google Scholar] [CrossRef]
- Li, Z.; Cao, H. An impedance control method for robots that can adapt to unknown or varying environmental stiffness and damping parameters. J. Chin. Mech. Eng. 2014, 25, 5. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Metric | Given the Desired Force | |||
|---|---|---|---|---|---|
| 1 N | 5 N | 10 N | 20 N | ||
| Impedance control | Max force error/N | 0.32 | 0.84 | 1.63 | 3.73 |
| Relative accuracy of force control | 32% | 16.8% | 16.3% | 18.65% | |
| Adaptive variable damping control | Max force error/N | 0.07 | 0.27 | 0.55 | 1.18 |
| Relative accuracy of force control | 7% | 5.4% | 5.5% | 5.9% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, D.; Song, Y.; Zhu, M.; Teng, Y.; Jiang, J.; Zhang, S. Adaptive Variable-Damping Impedance Control for Unknown Interaction Environment. Mathematics 2023, 11, 4961. https://doi.org/10.3390/math11244961
Gong D, Song Y, Zhu M, Teng Y, Jiang J, Zhang S. Adaptive Variable-Damping Impedance Control for Unknown Interaction Environment. Mathematics. 2023; 11(24):4961. https://doi.org/10.3390/math11244961
Chicago/Turabian StyleGong, Dawei, Yaru Song, Minglei Zhu, Yunlong Teng, Jinmao Jiang, and Shiliang Zhang. 2023. "Adaptive Variable-Damping Impedance Control for Unknown Interaction Environment" Mathematics 11, no. 24: 4961. https://doi.org/10.3390/math11244961
APA StyleGong, D., Song, Y., Zhu, M., Teng, Y., Jiang, J., & Zhang, S. (2023). Adaptive Variable-Damping Impedance Control for Unknown Interaction Environment. Mathematics, 11(24), 4961. https://doi.org/10.3390/math11244961