Abstract
Shunting inhibitory cellular neural networks with compartmental periodic unpredictable coefficients and inputs is the focus of this research. A new algorithm is suggested, to enlarge the set of known unpredictable functions by applying diagonalization in arguments of functions of several variables. Sufficient conditions for the existence and uniqueness of exponentially stable unpredictable and Poisson stable outputs are obtained. To attain theoretical results, the included intervals method and the contraction mapping principle are used. Appropriate examples with numerical simulations that support the theoretical results are provided. It is shown how dynamics of the neural network depend on a new numerical characteristic, the degree of periodicity.
Keywords:
shunting inhibitory cellular neural networks; compartmental periodic unpredictable functions; unpredictable solutions; Poisson stable solutions; the method of included intervals; exponential stability MSC:
26A99; 34C25; 34C60; 34D20; 68T01
1. Introduction
In 1988 [1], Chua and Yang introduced the concept of cellular neural networks (CNNs), which are arrays of dynamical systems. The authors used CNNs for image processing problems and solving partial differential equations [2]. These publications sparked widespread interest in CNNs among researchers, and since then, many new applications of CNNs have been introduced.
A class of CNNs, shunting inhibitory cellular neural networks (SICNNs), was proposed by Bouzerdoum and Pinter in 1993 [3]. They are biologically inspired networks in which the synaptic interactions among neurons are mediated via a nonlinear mechanism called shunting inhibition. In the Ref. [4], the application of SICNNs for medical diagnosis, which is based on some given symptoms and initial data, was shown. SICNNs are very useful for image processing since they can provide contrast and edge enhancement. The SICNNs algorithm allows to achieve a balance between enhancing the dark region, and at the same time retaining the colours in the bright [5,6]. The neural networks have been widely applied in various fields such as psychophysics, robotics, perception, and adaptive pattern recognition [7,8,9]. The variable and continuous-time excitatory inputs guarantee rich dynamics for SICNNs, as well as for shunting inhibitory artificial neural networks [4,5]. Exceptionally, if they are chaotic, the case will be under investigation of the present research.
It is known that dynamics of the neural networks is very complex, and play an important role in applications. Thus, many studies have been devoted to the study of SICNNs. In particular, the existence and stability of periodic [10,11], anti-periodic [12,13,14], almost periodic [15,16,17] and pseudo-periodic solutions [18,19] have been investigated.
In its original formulation [3], the model of SICNNs is as follows. Consider a two-dimensional grid of cells, and denote by the cell at the position of the mesh. In SICNNs, neighboring cells exert shunting-type mutual inhibitory interactions. The following differential equation describes the dynamics of the cell
where is the activity of the cell is the passive decay rate of the cell activity; is the connection of postsynaptic activity of the cell transmitted to the cell is the activation function; is the external input to cell and the r-neighborhood of is
with fixed natural numbers m and
Currently, only a few studies have investigated the Poisson stable and unpredictable motions of shunting-type cellular neural networks. For instance, the dynamics of the SICNNs (1), where the inputs are unpredictable, was investigated in [20]. Unpredictable oscillations of SICNNs with delay,
were considered in the Ref. [21]. In system (2), inputs are piecewise constant functions, which have not been approved for unpredictability, while in our research they are continuous unpredictable functions obtained through the compartmental algorithm.
In the Ref. [22], the following symmetrical impulsive SICNNs with a generalized piecewise constant argument,
was considered, and sufficient conditions for the existence and uniqueness of Poisson stable solutions were obtained.
The following neural model is in the focus of our study,
where the coefficients are continuous periodic functions; the components connection weights and inputs are compartmental periodic unpredictable functions; the activation function is continuous.
The dynamics of SICNNs (4), where the functions are periodic, are Poisson stable, and connection weights are constants, were investigated in the Ref. [23]. This time, all coefficients are time-varying functions, and have a more complex structure that combines periodicity and unpredictability. The Poisson stable and unpredictable solutions of the neural network (4) are under investigation.
It is indisputable that any theory of functions with applications should be accompanied by a number of methods of construction as well as numerical presentations of the functions. They can be simple algebraic operations, Fourier series and results of theory of operators. The methods of construction as well as numerical analysis of the unpredictable solutions are also on the agenda. A novel way to determine unpredictable functions is suggested, which is rooted at the compartmental paradigm. We start with functions of two variables, which are unpredictable in one of them, and in another are periodic. The domains of the functions are narrowed to diagonals of the argument spaces. The method of diagonals is known for quasi-periodic functions or almost periodic functions [24,25]. In the present study, the diagonalization is made on an essentially new level, since dependence on the two variables is significantly different. This is why it is of large interest to look for conditions such that functions on diagonals admit the unpredictability.
Despite many papers on almost periodic and Poisson stable functions, there are no numerical examples, neither for the functions nor solutions, if they are not quasi-periodic. However, the needs of the industry and particularly neuroscience and other modern areas demand numerical presentation of dynamics to support theories. Our study meets the challenges, since we construct several Poisson stable and unpredictable functions numerically, utilizing the merits of the logistic equation. One can emphasise that even for Poisson stable functions, which have been researched for about a century, the concrete samples of functions appeared for the first time in our papers [26,27]. The numerical experiments are advantageous, since they are accompanied by newly developed strong instruments of the functions simulations. They are convenient for synchronization of chaos. Delta synchronization has been introduced, which works for gas discharge-semiconductor systems [28,29], where even the generalized synchronization [30] is not effective. A numerical test for the unpredictable dynamics was suggested in the Ref. [31], and strange attractors were discovered [32]. Moreover, we constructed algorithms which allow to see the contribution of periodicity and the unpredictability for the compartmental dynamics [33]. They are based on the concept of the degree of periodicity. It was learnt that very similar time series can be seen in industrial experiments [34,35,36,37,38], and this is a strong argument for the application of our results. We believe that the study of the compartmental functions will shed more light on the problem of the transition from quasi-periodicity to chaos [39,40].
The rest of the paper is organized as follows. In Section 2, the basic and novel definitions are presented. Special relations between periodicity and unpredictability in compartmental arguments are determined to establish the unpredictability of compartmental functions. They are formulated in terms of time sequences. The lemma on the existence of an equivalent integral equation is provided as a key technical step in the analysis. The conditions for neural networks that are sufficient to obtain the results of the article are announced. Section 3 contains the main results of our study. Using the method of included intervals [26,27] and a contraction mapping principle, it is strictly proved that the Poisson stable and unpredictable motions, which are exponentially stable, are present in the dynamics of the SICNNs (4). In Section 4, discontinuous and continuous unpredictable functions are defined through the solution of the logistic map. A parameter, the degree of periodicity, which strongly affects the behaviour of the neural network is introduced. Numerical examples with illustrations confirming the feasibility of theoretical results are given. Finally, prospects of the obtained results for chaos control and synchronization in neural networks are discussed in Section 5.
2. Preliminaries
The definitions of the Poisson stable and unpredictable function are as follows.
Definition 1
([41]). A bounded function is called Poisson stable if there exists a sequence as such that the sequence of functions converges to uniformly on each bounded interval of
Definition 2
([42]). A bounded function is said to be unpredictable if there exist positive numbers and sequences as such that uniformly on compact subsets of and for each and .
The sequence is called the convergence sequence in Definitions 1, 2, and correspondingly, we shall say about the convergence property, while the existence of positive numbers and sequence is said to be the separation property.
It is easily seen, reading the last two definitions, that all unpredictable functions make a subset of Poisson stable functions specified with an additional property of separation. It was proved in our studies [42] that the property guarantees chaotic dynamics of the unpredictable motion. Loosely speaking, one can say that an unpredictable function is a Poisson stable function with assigned chaotic behaviour.
Definition 3
([33]). A function is called a compartmental periodic unpredictable function, if where is a bounded continuous function, periodic in u uniformly with respect to and unpredictable in v uniformly with respect to that is, there exist positive numbers , δ and sequences as such that for all uniformly on bounded intervals of and for and .
Remark 1.
To say that function in the last definition is a compartmental periodic unpredictable function does not mean that it is unpredictable in the sense of Definition 2. The question of whether the function on the diagonal is unpredictable will be answered under the conditions of Lemma 1.
Let us consider the convergence sequence and a fixed positive number One can write that where There exists a subsequence which tends to a real number Consequently, one can find a subsequence such that as The number is called a Poisson shift for the convergence sequence Denote by the set of all Poisson shifts. The number is said to be the Poisson number for We say that the convergence sequence satisfies kappa property with respect to the if
The following lemma is a main auxiliary result of the paper.
Lemma 1.
Let a bounded function is periodic in The function is unpredictable if the following conditions are valid:
- (i)
- For each there exists a positive number η such that if
There exist positive numbers and sequences both of which diverges to infinity as such that
- (ii)
- The sequence satisfies kappa property with respect to the
- (iii)
- uniformly on each bounded interval of
- (iv)
Proof.
Let us fix a bounded interval and a positive number By assumption one can write, without loss of generality, that as Therefore, conditions and imply that the following inequalities are valid:
and
for sufficiently large
Using inequalities (5) and (6), we obtain that
for all That is, converges to on each arbitrary bounded time interval uniformly, and the function satisfies the convergence property.
Conditions and imply that for sufficiently large Applying assumption one can obtain that
for all Thus, the separation property is valid. The lemma is proved. □
Remark 2.
If the conditions of Lemma 1 are valid, then function admits properties of Definition 3. This is why the lemma provides conditions for unpredictability of a compartmental periodic function.
Using the theory of differential equations [43], one can verify that the following lemma is true.
Lemma 2.
In order for a bounded on function to be a solution of (4), it is necessary and sufficient that it satisfies the integral equation
for all
Throughout the paper, we will use the norm where is the absolute value. In what follows, we consider the activation function f in the domain where H is a fixed positive number.
Suppose that is a set of functions with the norm such that all are Poisson stable with a common convergence sequence and
Define on the operator T as where
The following assumptions are needed for system (4):
- (C1)
- functions are -periodic, and
- (C2)
- functions and are compartmental periodic unpredictable such that where the functions and are periodic in u uniformly with respect to and unpredictable in v with common sequences uniformly with respect to
- (C3)
- convergence sequence satisfies the kappa property;
- (C4)
- where is a positive number;
- (C5)
- there exists a constant such that if
Condition (C1) implies that there exist constants and which satisfy
for all
For the sake of simplicity, the following notations will be used.
for each
We assume that the following conditions are satisfied.
- (C6)
- (C7)
3. Main Results
This part of the manuscript considers the existence of the dynamics, which is described in the Preliminary section. The discussion is fulfilled by researching dynamics of operator T in the space We will show that it is invariant and contractive in the set, and prove the existence of Poisson stable dynamics for the neural networks. Next, the existence of the unpredictable solution is approved, to guarantee chaotic features in the dynamics. The exponential stability of the solution is verified under suggested conditions.
Lemma 3.
Assume that conditions (C1)–(C6) are valid. Then T is an invariant operator in
Proof.
Let We have that
for all By condition (C6), we obtain that
Next, we prove that the sequence of the functions uniformly converges to on each bounded interval of Let us fix a bounded interval and a positive number There exist numbers and such that the following inequalities are valid for all
The proof technique given below is called the method of included intervals, since the interval is contained in [26].
Applying condition (C3), one can take a sufficiently large number p such that for Moreover, due to condition (C1), it is correct that for all We have that
Lemma 4.
Conditions (C1)–(C7) imply that T is a contraction operator in .
Proof.
Let and be members of It is true that the inequality
is valid for all Therefore, it is true that , and by condition , operator T is contractive in . □
Theorem 1.
If the assumptions – are valid, then the neural network (4) has a unique, exponentially stable Poisson stable solution.
Proof.
Let us show that the set is complete. Consider a sequence in which converges on to a limit function Fix a section We have that
One can take sufficiently large numbers p and k such that each term on the right-hand-side of (14) is smaller than for an arbitrary and . The inequality (14) implies that converges to uniformly on That is, the set is complete.
By the contraction mapping principle, duo to Lemmas 3 and 4, there exists a unique Poisson stable solution, of the system (4), such that the sequences converges to uniformly on each of the bounded intervals of
Now, let us discuss the stability of the solution It is true that
for all ,
If is another solution of the neural network (4), then
Using the formula
we obtain that
is valid for all
Applying the Gronwall–Bellman lemma, one can attain that
Consequently, is exponentially stable in accordance with condition (C7). □
Theorem 2.
Assume that conditions – are fulfilled. Then the neural network (4) possesses a unique exponentially stable unpredictable solution.
Proof.
According to Theorem 1, under conditions – there exists a unique exponentially stable solution which satisfies the convergence property. Now, we will prove that the separation property for the solution is true. Condition implies that for functions , there exists a sequence and positive numbers such that for each and
It is true that
and
Therefore, we have that
Denote One can fix positive numbers and such that the following inequalities are satisfied:
Consider the following two alternatives: (i) (ii)
(i) Using (19), for each one can show that
if Therefore, the condition (C4) and inequalities (15)–(19) imply that
for
(ii) If , it is not difficult to find that (18) implies:
for and Thus, we can conclude that is an unpredictable solution with positive numbers and sequences □
4. Degree of Periodicity and Numerical Simulations
This part of the article emphasises application significance of the theoretical achievements in the Section 3. Unpredictable continuous and discontinuous functions are constructively determined through discrete Poisson stable and unpredictable motions of the logistic equation. A special technical characteristic, the degree of periodicity, is introduced, which allows to estimate contributions of periodic and unpredictable arguments to the behaviour of the neural network. This can be useful for analysis of experimental data in industries [34,35,36,37,38], and this is a strong argument for the application of our results. Finally, two numerical examples with sophisticated dynamics can be seen below.
In the Ref. [42], it was proved that the logistic map
admits an unpredictable solution if That is, there exist sequences as and a positive number such that tends to for each i in a bounded interval of integers and for
Discontinuous unpredictable function. Consider the function where is an unpredictable solution of the logistic Equation (21), is a continuous function, and h is a positive number. Assume that there exist positive numbers and such that and for each
Let us show that the function is unpredictable. Fix an interval of real numbers and a number such that where s is a natural number. Then for and we have that and
Denote For a fixed positive number and sufficiently large number p, it is true that Therefore, for where l is a fixed integer number from to one can obtain that
The last inequality is valid for all Consequently, if Thus, the function satisfies the convergence property.
We have that there exists a positive number and the sequence as such that for each
From and it follows that Therefore, We obtain that
for all Thus, the function satisfies separation property, and one can conclude that it is unpredictable with positive numbers and sequences
Continuous unpredictable function. Using the function we construct an integral function where is a positive real number. The function is bounded on such that where
Let us discuss the unpredictability of the function Firstly, we shall approve the convergence property. Fix an interval and a number Applying the method of included intervals [26], we will show that uniformly on There exist numbers and such that the following inequalities are valid, and Let p be a large enough number, such that on We obtain that
for all Thus, as uniformly on the interval and the convergence property is fulfilled.
Next, we verify that the separation property is correct. Due to the unpredictability of the function we have that for Fix a natural number p and positive such that Consider two alternative cases: (i) (ii)
It is easily seen that the following relation holds
(i) From the last relation, we obtain that
for
(ii) Using the relation (23), we obtain that
for The inequalities (24) and (25) prove that the separation property is valid. Thus, the function is unpredictable with positive numbers and sequences
Below, we will use the continuous unpredictable function where as a component of compartmental periodic unpredictable coefficients. The number h is said to be the length of step of functions and For compartmental periodic unpredictable functions, the number is called the degree of periodicity.
Let us consider the following compartmental periodic unpredictable function The function is periodic in u uniformly with respect to and unpredictable in v uniformly with respect to For the function the degree of periodicity is equal to 200. In Figure 1 the graph of function is shown.
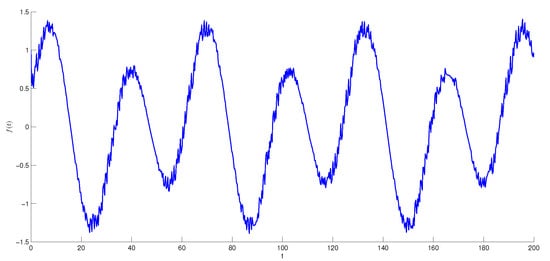
Figure 1.
The graph of compartmental periodic unpredictable function The length of step and degree of periodicity
The following lemma is used in the examples.
Lemma 5
([33]). Assume that bounded function satisfies the inequalities where are positive constants, for all Then the function is unpredictable, provided that is an unpredictable function.
Example 1.
Let us consider the system:
with and The functions and are compartmental periodic unpredictable. The functions are periodic: According Lemma 5, the functions and perturbation are compartmental periodic unpredictable: Condition (C1) is satisfied, and Condition (C3) is valid since the elements of the convergence sequence are multiples of the length of step h and the period ω is equal to Conditions (C4)–(C7) are satisfied with and
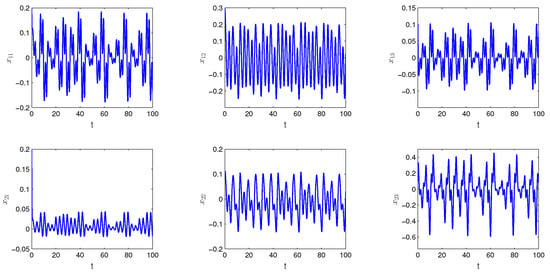
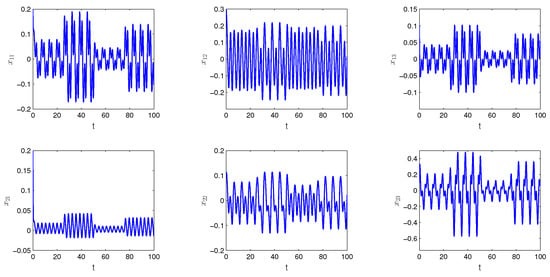
By Theorem 2, the neural network (26) has a unique exponentially stable unpredictable solution Figure 2 and Figure 3 show the solution with the length of step and respectively. The solution exponentially converges to the unpredictable solution
Figure 2.
The time series of the solution of the system (26) with initial values and the degree of periodicity
Figure 3.
The graph of the solution of SICNNs (26) with the initial values and the degree of periodicity
Example 2.
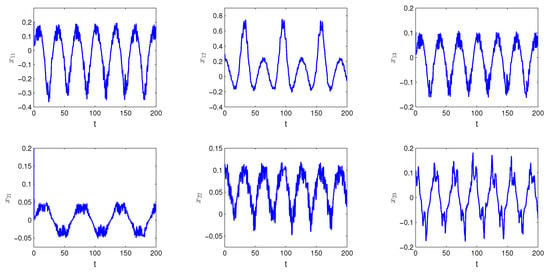
Let us take into account the SICNNs (26) with The functions and are the same as in Example 1. The period ω is equal to In Figure 4, the graph of the solution of SICNNs (26) with the length of step and the degree of periodicity is demonstrated.
Figure 4.
The graph of the solution of SICNNs (26) with the initial values and the degree of periodicity
Analysing the numerical simulations above, one can make interesting observations concerning dominance of periodicity and unpredictability in compartmental functions. Figure 2 and Figure 3 show that the unpredictability prevails if More precisely, periodicity is not seen if at all, and it appears only locally on isolated intervals, if In contrast, if one can see in Figure 1 and Figure 4 that the graphs admit a clear periodic shape, which is enveloped by the unpredictability.
5. Conclusions
In this paper, we considered SICNNs with variable compartmental unpredictable coefficients and inputs. Sufficient conditions were obtained to ensure the existence of exponentially stable unpredictable and Poisson stable solutions. Effectiveness of neural networks strongly depend on the selection of the right inputs [7,8,9]. Obviously, one can consider them not to be constant, but variable. In this case, there are two significantly different sorts of continuous-type inputs, regular (such as periodic, almost periodic, and recurrent) [10,11,12,13,14,15,16,17], and irregular or chaotic [44,45]. The choice of chaotic bias is an effective approach, since it is rich for infinitely many various motions, and periodic and almost periodic [46] are among them. The motions can be stabilized by different methods of control [47]. Recently, we have started to work with chaotic dynamics being focused on a single motion, the unpredictable point. The point is an unpredictable function [42], if the space is a functional one. The dynamics on the closure of the trajectory was named Poincaré chaos. Thus, all benefits of neural networks with chaotic inputs are also valid for the unpredictable dynamics in neuroscience. Additionally, new characteristics to synchronize have been determined [28,29], the convergence and divergence sequences. The characteristics make convenient circumstances for collective analysis of the neural networks. It deserves to be mentioned that the reduction in chaotic analysis to a single motion provides new possibilities for numerical simulations of neural networks, and this was seen in the present paper. We compared Figure 1, Figure 2, Figure 3 and Figure 4 with experimental data in the Refs. [34,35,36,37,38], and it was found that they are surprisingly similar. It means that the compartmental motions can find applications in solutions of industrial problems. Finally, the effectiveness of the compartmental approach to the unpredictability was shown by analysis of contributions of periodicity and unpredictability in the outputs, and it was just the first step in the direction of application of the research, since the next ones will be connected to control of chaos, which will be applied to the compartments’ parameters separately. Moreover, it will be productive if the compartmental nature of the dynamics will be taken into account for synchronization research [28,29,47,48,49].
Author Contributions
M.A.: conceptualization; methodology; investigation. M.T.: investigation; supervision; writing—review and editing. A.Z.: software; investigation; writing—original draft. All authors have read and agreed to the published version of the manuscript.
Funding
M. Akhmet and A. Zhamanshin have been supported by 2247-A National Leading Researchers Program of TUBITAK, Turkey, N 120C138. M. Tleubergenova has been supported by the Science Committee of the Ministry of Education and Science of the Republic of Kazakhstan (grant No. AP14870835).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors wish to express their sincere gratitude to the referees for the helpful criticism and valuable suggestions, which helped to improve the paper significantly.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chua, L.; Yang, L. Cellular neural networks: Theory. IEEE Trans. Circuits Syst. 1988, 35, 1257–1272. [Google Scholar] [CrossRef]
- Chua, L.; Yang, L. Cellular neural networks: Applications. IEEE Trans. Circuits Syst. 1988, 35, 1273–1290. [Google Scholar] [CrossRef]
- Bouzerdoum, A.; Pinter, R. Shunting inhibitory cellular neural networks: Derivation and stability analysis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1993, 40, 215–221. [Google Scholar] [CrossRef]
- Arulampalam, G.; Bouzerdoum, A. Application of shunting inhibitory artificial neural networks to medical diagnosis. In Proceedings of the 7th Australian and New Zealand Intelligent Information Systems Conference, ANZIIS 2001, University of Western, Perth, WA, Australia, 18–20 November 2001; pp. 89–94. [Google Scholar]
- Cheung, H.N.; Bouzerdoum, A.; Newland, W. Properties of shunting inhibitory cellular neural networks for colour image enhancement. In Proceedings of the 6th International Conference on Neural Information Processing, Perth, WA, Australia, 16–20 November 1999; pp. 1219–1223. [Google Scholar]
- Hammadou, T.; Bouzerdoum, A. Novel image enhancement technique using shunting inhibitory cellular neural networks. IEEE Trans. Consum. Electron. 2001, 47, 934–940. [Google Scholar] [CrossRef]
- Carpenter, G.A.; Grossberg, S. The ART of adaptive pattern recognition by a selforganizing neural network. Computer 1988, 21, 77–88. [Google Scholar] [CrossRef]
- Pinter, R.B.; Olberg, R.M.; Warrant, E. Luminance adaptation of preferred object size in identified dragonfly movement detectors. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Cambridge, MA, USA, 14–17 November 1989; pp. 682–686. [Google Scholar]
- Fukushima, K. Analysis of the process of visual pattern recognition by the neocognitron. Neural Netw. 1989, 2, 413–420. [Google Scholar] [CrossRef]
- Li, Y.; Wang, L.; Fei, Y. Periodic Solutions for Shunting Inhibitory Cellular Neural Networks of Neutral Type with Time-Varying Delays in the Leakage Term on Time Scales. J. Appl. Math. 2014, 2014, 496396. [Google Scholar] [CrossRef]
- Li, Y.K.; Liu, C.C.; Zhu, L.F. Global exponential stability of periodic solution for shunting inhibitory CNNs with delays. Phys. Lett. A 2005, 337, 46–54. [Google Scholar] [CrossRef]
- Fan, Q.Y.; Shao, J.Y. Positive almost periodic solutions for shunting inhibitory cellular neural networks with time-varying and continuously distributed delays. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1655–1663. [Google Scholar] [CrossRef]
- Peng, G.; Li, L. Anti–periodic solutions for shunting inhibitory cellular neural networks with continuously distributed delays. Nonlinear Anal. Real World Appl. 2009, 10, 2434–2440. [Google Scholar] [CrossRef]
- Huang, C.; Wen, S.; Huang, L. Dynamics of anti–periodic solutions on shunting inhibitory cellular neural networks with multi-proportional delays. Neurocomputing 2019, 357, 47–52. [Google Scholar] [CrossRef]
- Ou, C. Almost periodic solutions for shunting inhibitory cellular neural networks. Nonlinear Anal. Real World Appl. 2019, 10, 2652–2658. [Google Scholar] [CrossRef]
- Li, Y.; Meng, X. Almost periodic solutions for quaternion-valued shunting inhibitory cellular neural networks of neutral type with time delays in the leakage term. Int. J. Syst. Sci. 2018, 49, 2490–2505. [Google Scholar] [CrossRef]
- Li, Y.; Wang, C. Almost periodic solutions of shunting inhibitory cellular neural networks on time scales. Commun. Nonlinear Sci. Numer. Simul. 2018, 17, 3258–3266. [Google Scholar] [CrossRef]
- Lu, Y.; Ji, D. Pseudo almost periodic solutions for shunting inhibitory cellular neural networks with continuously distributed delays. J. Inequalities Appl. 2017, 2017, 242. [Google Scholar] [CrossRef] [PubMed]
- Zhang, A. Pseudo Almost Periodic Solutions for SICNNs with Oscillating Leakage Coefficients and Complex Deviating Arguments. Neural Process. Lett. 2017, 45, 183–196. [Google Scholar] [CrossRef]
- Akhmet, M.; Seilova, R.; Tleubergenova, M.; Zhamanshin, A. Shunting inhibitory cellular neural networks with strongly unpredictable oscillations. Commun. Nonlinear Sci. Numer. Simul. 2020, 89, 105287. [Google Scholar] [CrossRef]
- Fen, M.O.; Tokmak Fen, F. Unpredictable oscillations of SICNNs with delay. Neurocomputing 2021, 464, 119–129. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Seilova, R.; Nugayeva, Z. Poisson Stability in Symmetrical Impulsive Shunting Inhibitory Cellular Neural Networks with Generalized Piecewise Constant Argument. Symmetry 2022, 14, 1754. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Dynamics of Shunting Inhibitory Cellular Neural Networks with Variable Two-Component Passive Decay Rates and Poisson Stable Inputs. Symmetry 2022, 14, 1162. [Google Scholar] [CrossRef]
- Corduneanu, C. Almost Periodic Oscillations and Waves; Springer: New York, NY, USA, 2009. [Google Scholar]
- Besicovitch, A. Almost Periodic Functions; Dover: Cambridge, UK, 1954. [Google Scholar]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Modulo periodic Poisson stable solutions of quasilinear differential equations. Entropy 2021, 23, 1535. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Compartmental Poisson Stability in Non-autonomous Differential Equations. In Nonlinear Dynamics and Complexity; Pinto, C.M., Ed.; Springer: Cham, Switzerland, 2022; pp. 1–23. [Google Scholar]
- Akhmet, M.; Başkan, K.; Yeşil, C. Delta synchronization of Poincaré chaos in gas discharge-semiconductor systems. Chaos 2022, 32, 083137. [Google Scholar] [CrossRef]
- Akhmet, M.; Yeşil, C.; Başkan, K. Synchronization of chaos in semiconductor gas discharge model with local mean energy approximation. Chaos Solitons Fractals 2023, 167, 113035. [Google Scholar] [CrossRef]
- Rulkov, N.; Sushchik, M.; Tsimring, L.; Abarbanel, H. Generalized synchronization of chaos in directionally coupled chaotic systems. Phys. Rev. E 1995, 51, 980. [Google Scholar] [CrossRef] [PubMed]
- Akhmet, M.; Fen, M.; Tola, A. A Numerical Analysis of Poincaré Chaos. Discontinuity Nonlinearity Complex. 2023, 12, 183–195. [Google Scholar] [CrossRef]
- Akhmet, M.; Fen, M.; Tola, A. Strange Non-Chaotic Attractors with Unpredictable Trajectories. J. Vib. Test. Syst. Dyn. 2022, 6, 317–327. [Google Scholar]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Compartmental unpredictable functions. Mathematics 2023, 11, 1069. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, H.; Nayak, A. Periodic time series data analysis by deep learning methodology. IEEE Access 2020, 8, 78–88. [Google Scholar] [CrossRef]
- Li, X.; Xu, F.; Zhang, J.; Wang, S. A multilayer feed forward small-world neural network controller and its application on electrohydraulic actuation system. J. Appl. Math. 2013, 1, 211–244. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, Q. Square wave analysis. In Common Waveform Analysis; Cai, K.Y., Ed.; Springer: Boston, MA, USA, 2000; pp. 13–40. [Google Scholar]
- Mohammad, U.; Yasin, M.; Yousuf, R.; Anwar, I. A novel square wave generator based on the translinear circuit scheme of second generation current controlled current conveyor–CCCII. SN Appl. Sci. 2019, 1, 587. [Google Scholar] [CrossRef]
- Wu, U.; Yasin, M.; Yousuf, R.; Anwar, I. Deep convolutional neural network for structural dynamic response estimation and system identification. J. Eng. Mech. Appl. Sci. 2019, 145, 04018125. [Google Scholar] [CrossRef]
- Landau, L. On the Nature of Turbulence. C. R. Dokl. Acad. Sci. USSR 1944, 44, 311314. [Google Scholar]
- Ruelle, D.; Takens, F. On the Nature of Turbulence. Commun. Math. Phys. 1971, 20, 167–192. [Google Scholar] [CrossRef]
- Sell, G. Topological Dynamics and Ordinary Differential Equations; Van Nostrand Reinhold Company: London, UK, 1971. [Google Scholar]
- Akhmet, M.; Fen, M.O. Poincaré chaos and unpredictable functions. Commun. Nonlinear Sci. Nummer. Simulat. 2017, 48, 85–94. [Google Scholar] [CrossRef]
- Hartman, P. Ordinary Differential Equations; Birkhauser: Boston, MA, USA, 2002. [Google Scholar]
- Gui, Z.; Ge, W. Periodic solution and chaotic strange attractor for shunting inhibitory cellular neural networks with impulses. Chaos 2006, 16, 033116. [Google Scholar] [CrossRef]
- Sun, J. Stationary oscillation for chaotic shunting inhibitory cellular neural networks with impulses. Chaos 2007, 17, 043123. [Google Scholar] [CrossRef] [PubMed]
- Akhmet, M. Almost Periodicity, Chaos, and Asymptotic Equivalence; Springer: New York, NY, USA, 2020. [Google Scholar]
- Gonzáles-Miranda, J.M. Synchronization and Control of Chaos; Imperial College Press: London, UK, 2004. [Google Scholar]
- Zhang, Z.; Cao, J. Finite-Time Synchronization for Fuzzy Inertial Neural Networks by Maximum Value Approach. IEEE Trans Fuzzy Syst. 2022, 30, 1436–1446. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, J. Novel Finite-Time Synchronization Criteria for Inertial Neural Networks With Time Delays via Integral Inequality Method. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1476–1485. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).