1. Introduction
Due to limited resources, waiting in queues is an inevitable feature of human life. When a person arrives for service at some system and cannot start receiving the service immediately, he/she has to decide whether to wait until the service device is available or depart from the system without service. In the former case, a common situation is that there are several service devices, and the person has to decide which queue he/she will join. The problem of choosing the proper queue can be difficult. Most often, the choice of the person (below, we call him/her the client) is based on the comparison of the lengths of the queues to the servers. However, due to the random duration of the service process for clients, the reasonable choice to join the shortest queue may not guarantee the minimal waiting time. After a client joins some queue, it may occur that a certain alternative queue decreases more quickly. In real-world systems, this may lead to the so-called jockeying of the clients from one queue to another currently shorter one. The main purpose of the queueing theory is to build and analyze adequate models of real systems to optimally (in terms of some revenue criterion) manage their operations. Thus, the jockeying phenomenon has already attracted a lot of attention in the queuing literature. Note that the models with jockeying are similar to models in which clients have to choose among several queues and do this according to the shortest queue rule; see, e.g., [
1]. For references to the literature relating to the models with jockeying, see, for example, papers [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12].
In the early paper [
2], the models with two single-server devices, two stationary Poisson arrival processes, and an exponential distribution of service times are considered. Three different strategies for client scheduling are considered. One of them suggests initially joining the shortest queue. Further, a client can jump to the alternative queue if that one becomes shorter. More general and popular in the literature, the jockeying rule assumes that the jump occurs when the difference between the lengths of queues exceeds a fixed threshold. Such a type of model was analyzed, e.g., in [
7]. Systems with more than two servers are dealt with in [
3,
4,
5,
6]. The majority of papers assume that the buffers are infinite. In [
10], a model with two servers and finite buffers was under study.
The overwhelming majority of existing papers suggest that the arrival flows are defined by the stationary Poisson arrival process. However, this suggestion is not realistic in many modern real-world systems. In the paper [
4], the renewal arrival process is supposed, i.e., inter-arrival times are independent and identically arbitrarily distributed. This allows modelling real-world systems more adequately because not only the average arrival rate but also higher moments of the distribution of inter-arrival times, including their variance, can be taken into account. In the paper [
8], the asymptotic behavior for the
queue with the shortest queue discipline and jockeying is analyzed. Here,
denotes the phase-type distribution of service times, and
denotes the Markovian arrival process. This process, initially introduced by M. Neuts as a versatile arrival process, allows taking into account not only the mean value and variance of inter-arrival times but also the correlation of these times. This makes the
a good model of modern arrival processes in telecommunication networks, contact centers, etc. More useful information about the
can be found, e.g., in [
13,
14,
15,
16,
17,
18,
19,
20,
21].
In our paper, we also assume that clients arrive according to the
Supplementary to [
8], where the author presented only an approximate analysis of the tail decay rate of the stationary distribution of the longest queue, here we present an exact algorithmic analysis of the whole queuing system. The considered model of jockeying is different from the one suggested in [
8] and other models considered in the existing literature.
Our model is formulated based on the authors’ personal experience of visiting supermarkets, airports, and various offices. For example, we will briefly describe a real-life scenario in which it can be applied to the terminology of supermarkets.
In modern supermarkets, often the bottleneck is the area of payment for the products after their selection by clients. Usually, there are two zones for consumers to checkout in supermarkets. Service in one zone is provided by several independent human cashiers. The second zone consists of several independent self-service devices (SSDs) specially designed for clients’ self-service. The popularity and usefulness of the wide use of SSDs are mentioned in many papers; for reference, see, e.g., [
22]. Usually, the two zones mentioned are located close to each other but are more or less spatially divided. Thus, there are separate queues for customers waiting for service in these zones.
The arriving client observes the lengths of both queues and makes decisions based on his/her own preferences, experience, psychology, the importance of shopping right now in this supermarket, etc. One possible decision is to immediately depart (balk) from the system without service. Such a decision, as a rule, is taken if the consumer evaluates that the required waiting time exceeds the value appropriate for him/her, he/she does not have a discount card for this supermarket, and there are alternative supermarkets in the vicinity. Another decision is to join the system. In this case, the client has to make one more decision: to join the queue in the zone with cashiers or the queue for SSDs. We assume that both decisions are randomized, with the probabilities depending on the length of the queues and the personality of the client. Statistics about typical values of such probabilities may be available, at least for supermarket managers, in modern, highly computerized supermarkets equipped with video surveillance systems.
After joining some queue, the client should wait until he/she is picked up for the service from this queue according to the First In–First Out discipline. In the majority of queuing models with clients jockeying, it is supposed that the tagged client permanently monitors the length of all queues. The client jockeys to another queue if he/she sees that the difference between the length of the queue in front of him/her and some alternative queue reaches some fixed value in the advance threshold. Multiple reverse jockeying is usually possible. This may be a realistic scenario in some real-world systems.
In our model (with two multi-server service devices), we analyze another realistic scenario that we usually observe in real supermarkets. First of all, when making decisions about the preferred queues, clients may not use the standard rule considered in many research papers: to join the shortest queue. This is because the prospective waiting time depends not only on the queue length but also on the number of servers and the rate of their operation. Another reason for making a choice in another way may be the a priori preference of the customer. Some users may prefer to receive service at SSDs due to various reasons related to psychology or knowledge of the language. Another user prefers human cashiers due to a lack of or negative experience with operating with SSDs.
After joining a queue, clients in supermarkets usually do not permanently keep track of both queue lengths, and, as it was just said, they are not very informative. Consumers may prefer not to continuously monitor the queue and use spare time to call by phone or browse the Internet. We assume that the clients staying in the queue can watch the state of the alternative queuing system after the random time intervals. We assume that the client, observing that the alternative system has an idle server, leaves his/her place in the current queue, moves to another zone, and immediately starts service there.
Thus, we suggest that each client not jockey between queues several times. He/she may jockey only once and only when he/she has an opportunity to immediately start service in the alternative queue. It is worth noting that the analyzed scenario of jockeying is: (i) realistic in supermarket modeling; (ii) a bit similar to the mechanism of customer retrials in a multi-server queue with repeated attempts and the classical strategy of retrials. For references to the literature devoted to the analysis of retrial queues; see, e.g., [
23,
24,
25]. Clients staying in some queue of the system under study behave similarly to customers staying in the orbit of the respective retrial multi-server queue.
The discipline of jockeying used in our model allows the system to be more conservative, i.e., to reduce the possibility of some servers staying idle when there are waiting clients, on the one hand. On the other hand, it allows the avoidance of chaos that can occur when many clients frequently jockey between the queues under the traditional threshold jockeying discipline.
As has already been mentioned, although we gave the verbal description of the considered queueing model in terms of a supermarket, it can be formulated in terms of various other service systems. We can mention, e.g., systems for check-in, luggage drop, passport control, and security control in airports and other transport hubs, service systems in different bank, tax, and other municipal or governmental offices with the possibility of self-service, and various other real-world objects that split the common flow of requests between various groups of servers and are tolerant of users jockeying.
Because the dynamics of the queue with jockeying clients is described by at least two components (number of customers in two or more corresponding systems), it is natural that many of the papers cited above exploit the useful tool of level-independent Quasi-Birth-and-Death processes for analysis. This tool, developed mainly by M. Neuts, see, e.g., [
14], leads to the computation of the stationary distribution in a quite simple matrix-geometric form. In [
6], the use of so-called
-type Markov allowed obtaining the solution in a similar matrix-geometric form for the system with the renewal arrival process. In our paper, due to the use of the briefly described alternative mechanism of jockeying, the behavior of the system is described by the level-dependent Quasi-Birth-and-Death process, and results from [
26,
27,
28] are used for the computation of the stationary distribution of a multi-dimensional Markov chain describing the behavior of the considered system.
It is worth noting also that due to the assumption that the service time distribution in the SSD servers has not an exponential but a more general phase-type (
) distribution, the size of the blocks in the generator of a Markov chain can be large. To make them as small as possible, we use the results obtained as the refinement of the known approach by D. Lucantoni and V. Ramaswami, see, e.g., [
29,
30], for constructing the Markov chain. Motivation for our consideration of
-type distribution of service time in System 2 instead of a much more simple exponential distribution is the following. The model under study supplements the model of operation of SSDs in supermarkets or other systems with the possibility of self-service, which was analyzed in [
22]. In [
22], only the work of the system with SSDs was considered. The existence of an alternative to receiving service via cashiers was not considered. Here, we take into account this alternative. A positive feature of the model considered in [
22] was the consideration of the possibility of interruptions in service by SSDs due to the occurrence of problems in service. These problems can be solved with the help of assistants. Therefore, the full service time for a client may consist of several phases of service and waiting for help. Thus, it is a good choice to model the service time by SSDs in our model, which does not directly account for the possibility of breaks, by the phase-type distribution.
In the next section, we present a mathematical model of the considered system.
2. Mathematical Model
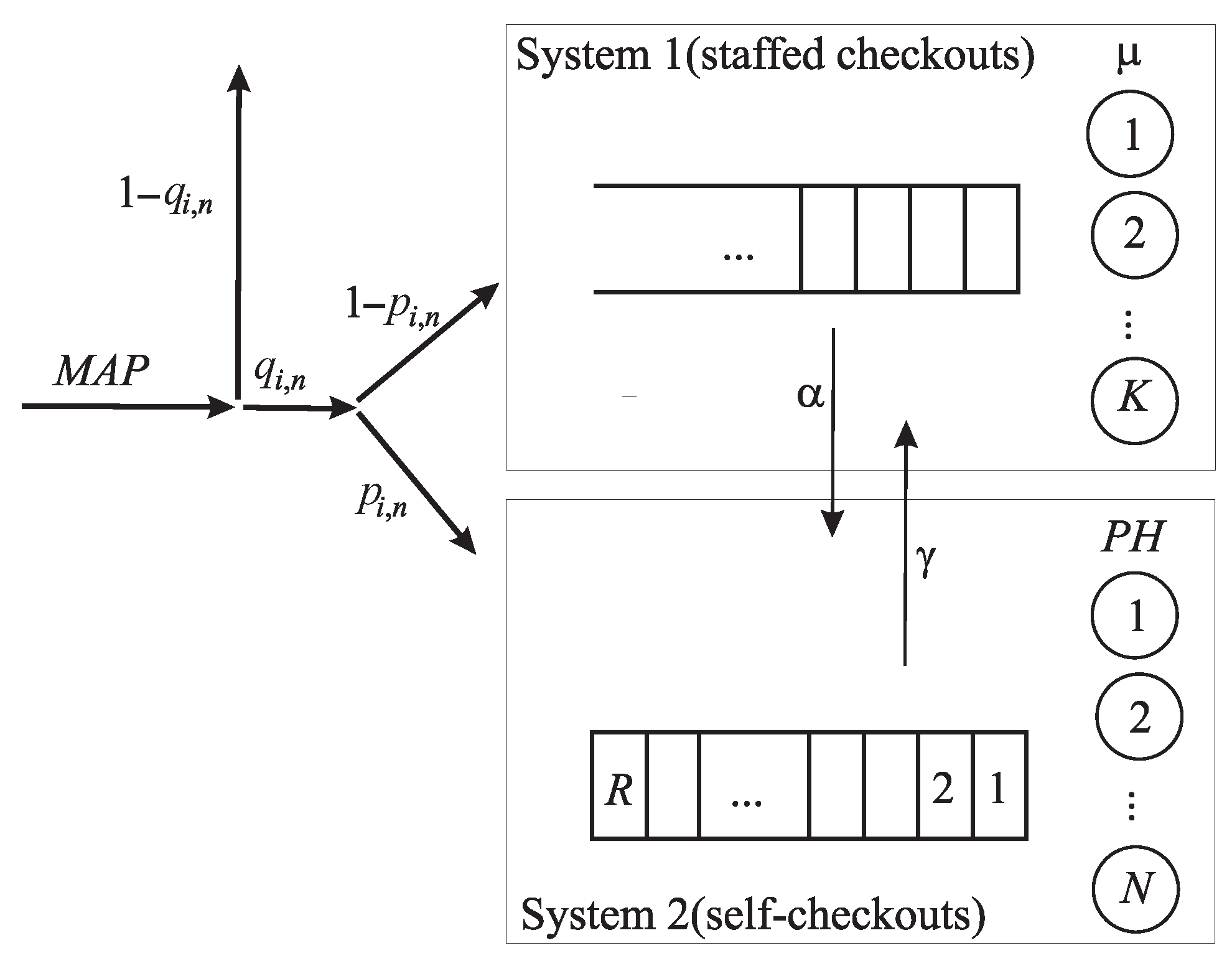
We consider a queueing model consisting of two dependent systems. System 1 consists of
K servers (staffed or human checkouts) and an infinite buffer. System 2 has
N servers (self-checkouts or SSDs) and a finite buffer of capacity
. The structure of the system under study is presented in
Figure 1.
Clients arrive in the system in accordance with the
arrival flow. This flow is defined by an underlying Markov chain (
)
with finite state space
Each transition of the underlying process may lead to the arrival of a client. The intensities of these chain transitions are defined by two matrices,
and
The diagonal entries of matrix
give, up to the sign, the intensities of
leaving the corresponding state. The non-diagonal entries of the matrix
represent the intensities of
transitions that are not accompanied by the arrival of a client, while matrix
consists of the intensities of the transitions with client arrivals. Much more information about the
and its performance indicators can be found, e.g., in [
13,
14,
15,
16,
17,
18,
19,
20,
21]. In this paper, we denote as
the average arrival intensity of clients in the
. This intensity can be found as
where
defines the stationary distribution of the
and is defined as the solution to the system
Here,
is a column vector of the form
and
is a row vector of the form
.
We assume that each arriving client may observe the number of clients in both systems. Based on this information, the client decides whether to balk or join one of the buffers. We assume that an arriving client decides to balk with the probability where is the current number of clients in System 1 and is the current number of clients in System 2. With the complimentary probability , the client decides to receive service. If the client decides to receive service, he/she joins System 2 with the probability and arrives at System 1 with the complimentary probability. Here, we assume i.e., if the finite buffer is full, the client always joins the infinite buffer.
The service time of a client in System 1 has an exponential distribution with the parameter
The service time distribution of a client in System 2 is of
-type with an irreducible representation
and underlying process
with finite state space of transient states
The vector
defines the probability of choosing the initial state of the underlying process
at the moment of service beginning. The sub-generator
S gives the transition intensities of the
within the set
The column-vector
defines the intensities of transition to the absorbing state. Such a transition leads to the service completion. For more information about
the interested reader is referred to [
14,
19].
We assume that each client staying in the buffer of System 1 makes attempts to obtain service in System 2 without waiting with the intensity . The attempt is successful if, during the attempt epoch, there is at least one free server in System 2. In this case, the client leaves System 1 and starts service in System 2. If the attempt is unsuccessful, the client remains in the same place in the buffer of System 1. Analogously, the clients staying in a buffer in System 2 can make attempts to obtain service in System 1 without waiting with the intensity . The attempt is also assumed to be successful only if, during the attempt epoch, there is at least one free server in System 1.
Our goals are to analyze the stationary behavior of this system and give some insights into its quantitative behavior.
3. The Process of System States
The behavior of the system under consideration can be described by the following regular irreducible
with continuous time
where at time
is the number of clients in System 1,
is the number of clients in System 2,
is the state of the underlying process of the ,
is the number of servers at phase l of service in System 2,
Note that, following the approach suggested in [
29,
30], here we monitor the numbers of servers at various phases of service in System 2 instead of keeping track of the phase of service at each busy server. This allows to essentially reduce the state space of the
describing the behavior of the system, especially when the number of servers
N is large in comparison to the number of phases
The number of possible states of the components
is equal to
under the description of service processes chosen here instead of
When
and
the corresponding numbers are 21 and 1,048,576, respectively, see [
31]. This clearly motivates our choice of the
To analyze the we enumerate its states in the direct lexicographic order of the components and the reverse lexicographic order of the components We will call all states of the chain that have the value i of the denumerable component as level i of the
Let us denote the infinitesimal generator of this chain as The matrix Q contains intensities of all possible transitions of the considered chain during an infinitesimally short time interval.
Theorem 1. The infinitesimal generator Q of the has a block-tridiagonal structure The blocks determining transition rates from the level i to the level j are defined as follows:wherewhere Here, is the identity matrix of a size indicated by the subscript, and O is a zero matrix of a size that should be clear from context;
⊗ is the symbol of Kronecker product of matrices; see, e.g., [32]; under the fixed value n of the component
The matrix defines the rates of transitions of the components , which do not imply the changes in the component ;
The matrix defines the rates of transitions of the components , which lead to the decrease in the component by one;
The matrix defines the rates of transitions of the components , which lead to the increase in the component by one;
The diagonal elements of the diagonal matrix determine the rates of the exit of the process from the corresponding state;
The number is equal to the cardinality of state space of the process when service is simultaneously provided to n clients. It is calculated as is equal to 1 if the condition is true and is equal to zero otherwise.
Algorithms for the computation of the matrices
are presented in [
33] and represent the enhanced versions of the algorithms earlier proposed in [
29,
30] and previously used, e.g., in [
34,
35,
36].
Proof. Proof is implemented via the analysis of the rates of possible changes in the number of clients in two subsystems at the moments of possible arrival of clients (with options of no arrival, arrival and balking, arrival and joining one of the two subsystems), service completion in System 1, transitions of the components of the process with or without service completion, and random jockeying of waiting clients between the systems in the case of availability of servers in the alternative system. The brief explanation of the probabilistic meaning of the matrices given in the text of the theorem should be helpful to understand the form of the blocks and sub-blocks of the generator. □
4. Computation of the Stationary Distribution of the Markov Chain
Having obtained the explicit form of the generator Q of the we can start the computation of its stationary distribution. As the first step in computation, it is necessary to obtain conditions for the existence of this distribution. Until now, we did not impose any restriction on the form of dependence of the probabilities and on the variables and The algorithm for computation of the stationary probabilities used by us below is feasible for any form of such dependence, assuming that these probabilities indeed exist.
To obtain a constructive condition, the fulfillment of which guarantees the existence of the stationary probabilities, we impose the following assumption.
Assumption A1. Let the following conditions be fulfilled:
(a) There exists the limitindependent on (b) For each there exist the limits Theorem 2. Let Assumption 1 hold true. Then the sufficient condition for the ergodicity (existence of the invariant probability distribution) of the is the fulfillment of the inequalitywhere the row vector φ is the unique solution to the system The sufficient condition for the non-ergodicity of the is the fulfillment of the inequality Proof. Let the matrix
be the diagonal matrix with the diagonal blocks defined as
where
denotes the Hadamard (entry-wise) product of the matrices
I and
see, e.g., [
37]. In other words,
is the diagonal matrix with the diagonal entries given by the modules of the corresponding entries of the matrix
To prove the theorem, we will use the results from [
26] where the class of structured multi-dimensional Asymptotically Quasi-Toeplitz Markov chains (
) is introduced and analyzed. To this end, we first need to show that the
belongs to the class of
This means that the following conditions are satisfied:
(1) There exist the limits
and
(2) The matrix is the stochastic one.
The existence of the limits is verified via the algebraic transformations.
Let us now denote
where ⊕ is the symbol of the Kronecker sum of matrices; see [
32].
Then, it can be verified that the matrices
and
exist and have the following structure:
where
is the square matrix of size
having all zero entries except the single entry located in the last position in the first row, which is equal to 1,
means the diagonal matrix with the diagonal elements given in parentheses,
means the sub-diagonal matrix with the sub-diagonal elements given in parentheses,
means the up-diagonal matrix with the up-diagonal elements given in parentheses. The condition that the matrix
is the stochastic one is easily verified by multiplying this matrix from the right by the column vector
and obtaining the vector
It is also obvious that the matrix
is irreducible.
Therefore, we have shown that the
belongs to the class of
and can use the results from [
26] for the derivation conditions for its ergodicity. These conditions are formulated as follows.
Let the vector
be the positive solution of the equation
Then, the sufficient condition for the ergodicity of
is the fulfillment of the inequality
The sufficient condition for the non-ergodicity of
is the fulfillment of the inequality
Taking into account the explicit form of the matrices
,
and
for the
under study, it can be verified that the solution
of system (3) has the form
where the row vectors
are the components of the row vector
, which is the unique solution to the system
where the block matrix
is defined as
where
Substituting (5) into inequality (4), we obtain the inequality
It is evident that the vector defines the joint distribution of the components of when the system is overloaded and all servers of System 2 are permanently busy. Thus, the vector is equal to the vector where is the invariant probability vector of the underlying process of the and is the invariant probability vector of the underlying processes of permanent service in N servers given by Formula (2).
Taking into account the mixed product rule for the Kronecker product of matrices and that
inequality (7) reduces to the inequality
Analyzing the graph illustrating the behavior of the
with the generator
it can be shown that
By substituting (9) to (8), we obtain inequality (1).
A sufficient condition for non-ergodicity follows from (5). □
Corollary 1. If the service time in servers in System 2 has an exponential distribution with the rate then inequality (1) reduces to the inequality This inequality is evidently tractable. The rate of clients joining the system should be less than the service rate when all servers of both systems are busy.
Remark 1. It is worth noting that here we have a rather happy situation when we succeeded in obtaining a simple ergodicity condition without obtaining the explicit expressions for the components of the vector , which satisfies equations such as (3).
It is worth mentioning that in [22], the model of client service provided by SSDs was considered. That model is the analog of System 2 in our current model. Only it was supposed in [22] that the input buffer is infinite and a finite number M of assistant servers are used to help the N main servers in the case of problem occurrence. The probability of problem occurrence is Service times by the main and assistant servers were assumed to be exponential with rates and , respectively. During the proof of the ergodicity condition in [22], the slip of pen appears after transformation in the case of the obtained ergodicity condition to the final form with explicit values of the involved probabilities that n main servers need help, at an arbitrary moment in the overloaded system. Thus, instead of formula (2) in [22], namely, we use the formulafor probabilities which is valid only in the case when and in the general case, it is necessary to use a slightly modified formula Remark 2. The probability q in Assumption 1 corresponds to the share of clients that are ready to join the system even if the queue is huge. If this probability is equal to 0, then, as follows from Theorem 2, the stationary distribution of the system states exists for any values of arrival, service, and jockeying rates.
Let the
be ergodic. Then the invariant probabilities of the
exist.
We form the row vectors of these invariant probabilities enumerated in the direct lexicographic order of the component and the reverse lexicographic order of the components and, then, the row vectors
It is known that the row vectors
satisfy the following equation
with the normalization condition
Because the generator
Q has an infinite size and the transition rates of the
are level-dependent, the problem of solving this system is not easy. Often in the existing literature, such systems are solved via the rough or soft (see, e.g., [
38]) truncation of system (10). This trick has three evident shortcomings: (i) convergence of the solution of the truncated system to the solution of system (10) is not proved; (ii) it is not clear how to choose the truncation level; (iii) there is a high chance of not obtaining even a more or less satisfactory approximate solution. This can occur because to obtain an appropriate solution, it is necessary to choose a truncation level such that the solution to the system of linear algebraic equations of the required size is impossible due to a restriction of computer memory or too long a runtime.
Thus, to solve system (10) for invariant probabilities, we use our own methods described in papers [
26,
27,
28]. The algorithm elaborated in [
26] is oriented to a more general (upper Hessenberg) form of the generator and fulfillment of the asymptotic assumption such as Assumption 1 above. The algorithm from [
28] can be applied without making such an assumption. The most quick algorithm presented in [
27] is oriented namely to the tridiagonal block structure of the generator, which has the
under study. Therefore, we use this algorithm here for the preparation of the numerical examples.
6. Numerical Example
In this numerical example, we assume that the arrival flow of clients is modeled by the
arrival process and defined by the following matrices:
The average arrival intensity of clients is equal to The coefficient of the correlation of successive inter-arrival times in this arrival process is and the squared coefficient of variation is .
The probabilities
and
are given as follows:
where
The service rate of a client in System 1
The service times of clients in System 2 have a
distribution with the following parameters:
The mean service time in System 2 is equal to the squared coefficient of variation is
The jockeying intensities and are assumed to be and respectively.
Let us vary the number
K of servers in System 1 over the interval
We assume that the total capacity of System 2 is
and vary the number
N of servers in the interval
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
Figure 12 show dependence on the numbers of servers
K and
N of the main performance measures of the system.
Figure 2 presents the dependence of the average number
of busy servers in System 1. This number increases when the number
K of servers in this system increases. The increase becomes slower when
K is large. The number
N servers in System 1 has a weaker influence on
The slight increase in
takes place when
K is large and
N is small, which implies more frequent jockeying of clients from System 2 to System 1.
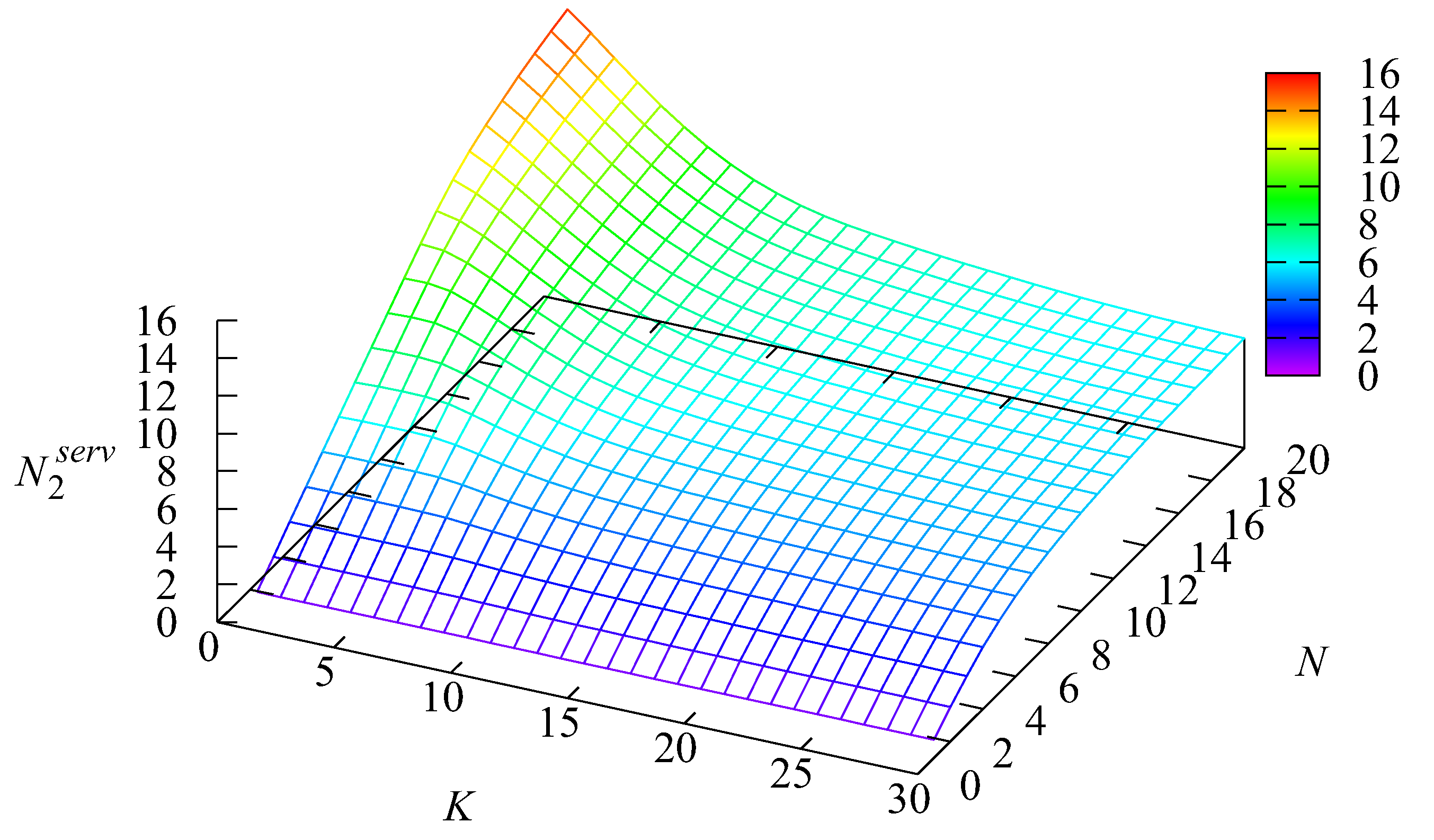
Figure 3 presents the dependence of the average number
of busy servers in System 2. This number increases when the number
N of servers in this system increases. The increase is very essential when
K is small and
N is large, and thus, many clients jockey to System 2.
Figure 4 presents the dependence of the average number
of clients in the buffer of System 1. Generally speaking, this number decreases when
K increases and more clients receive service in System 1 without visiting a buffer. However, there are interesting anomalies when the number of servers in System 1
K is small, and it is natural that the queue length in this system is very long. For small
the initial increase in
N leads to a decrease in the number of clients who balk upon arrival. This, in turn, increases the arrival rate of clients in System 1. The further increase in
N implies a larger total service rate in System 2 and higher chances that the servers of this system will stay idle and withdraw more clients from the buffer of System 1. Other small irregularities are explained by a complicated form of dependencies of the probabilities
and
on the arguments
Figure 5 presents the dependence of the average number
of clients in the buffer of System 2. The essential decrease in
with the increase in
K is explained by more intensive jockeying of clients from System 2 because System 1 starts to have more idle servers. A large value of
when the number of servers in both systems is small is obvious. The slightly strange behavior of
for small
N and the initial increase in
K is explained by the different forms of the probabilities
and
for
and
Figure 6 presents the dependence of the probability
that an arbitrary client joins System 1 upon arrival. As it is expected, this probability grows with the increase in the number of servers
K because that increase implies that fewer clients wait in System 1. While this leads to a smaller value of balking the system and a larger probability of joining the system. It is natural that the impact of the number
K of servers in System 1 is more essential. A small increase in
for a large number of servers in System 2 is explained by the increase in help for System 1.
Figure 7 presents the dependence of the probability
that an arbitrary client joins System 2 upon arrival. As expected, this probability is maximal when the number
N is large (and System 2 is not overloaded), while System 1 is overloaded due to the small number of existing servers.
Figure 8 presents the dependence of the probability
that an arbitrary client immediately starts service in System 1. The shape of the surface given in this figure is quite clear because the increase in
K implies higher chances that some servers will be idle at an arbitrary client arrival moment. Again, the change in the rate of increase in
is explained by the piecewise dependence of probabilities
on the arguments
Figure 9 presents the dependence of the probability
that an arbitrary client immediately starts service in System 2. This probability is highest when the number
N of servers in this system is large compared to the number of servers in the alternative system, which is small.
Figure 10 presents the dependence of the average jockeying intensity
of clients from the buffer of System 1 to the servers of System 2. This intensity is small when the number of servers in System 1 is large enough, and System 1 does need help from servers of System 2. When the number of servers in System 1 is small while the number of servers in System 2 is large, it is natural that the average jockeying intensity
is maximal.
Figure 11 presents the dependence of the average jockeying intensity
of clients from the buffer of System 2 to the servers of System 1. The explanation of the presented surface is exactly the opposite of the explanation of the previous figure.
Figure 12 presents the dependence of the loss probability
of an arbitrary client due to the unwillingness to join the system. It is natural that this probability has a maximum when both systems are highly loaded. This occurs when the number of servers in these systems is small. This probability essentially decreases with the increase in at least one or both numbers of servers.
Now, let us demonstrate an opportunity for the application of the obtained results to solving a simple optimization problem. We assume that the quality of the system design is evaluated in terms of the following cost criteria, which have the meaning of the average revenue obtained by the system per unit of time:
where
a is the profit earned via providing service to one client,
c is the bonus for providing a service to an arbitrary client without waiting in a queue,
b is the charge (lost profit) for the balking of one client,
is the cost of the use of one server in System 1 per unit of time, and
is the cost of the use of one server in System 2 per unit of time.
In this numerical example, we fix the following values of the cost coefficients:
We assume that basically because the lost profit may equal the earned profit. However, in general, they can be not equal, e.g., if the balked client not only did not bring a profit right now but may decide to receive service in the future in another competitive service system.
Figure 13 presents the dependence of the cost criterion
E on the parameters
N and
It is clear from this figure that the revenue of the system essentially depends on the choice of the numbers K and N of the required servers. The revenue can even turn into a loss if these values are fixed incorrectly, e.g., if the chosen number N of servers in System 2 (number of SSDs) is insufficient.
The optimal value of the cost criterion in this example is and is reached when and

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}