Abstract
The classical Lotka–Volterra predator–prey model is globally stable and uniformly persistent. However, in real-life biosystems, the extinction of species due to stochastic effects is possible and may occur if the magnitudes of the stochastic effects are large enough. In this paper, we consider the classical Lotka–Volterra predator–prey model under stochastic perturbations. For this model, using an analytical technique based on the direct Lyapunov method and a development of the ideas of R.Z. Khasminskii, we find the precise sufficient conditions for the stochastic extinction of one and both species and, thus, the precise necessary conditions for the stochastic system’s persistence. The stochastic extinction occurs via a process known as the stabilization by noise of the Khasminskii type. Therefore, in order to establish the sufficient conditions for extinction, we found the conditions for this stabilization. The analytical results are illustrated by numerical simulations.
Keywords:
stochastic perturbations; white noise; Ito’s stochastic differential equation; the Lyapunov functions method; stability in probability; stabilization by noise; stochastic extinction; persistence MSC:
37H30; 92B05
1. Introduction
Let us consider the classical predator–prey model: [1,2,3,4,5]
This model was suggested independently by Volterra and Lotka in order to describe the dynamics of two interacting species, of which one (the “predator”, of the population density ) predates (and thus depends) upon another (the “prey”, of the population density ). The model was suggested by Volterra to explain a surprising decline in commercially valuable fish populations in the Adriatic sea after the First World War. As an obvious example, the dynamics of interacting fox (the predator) and rabbit (the prey) populations, of densities and , respectively, in a closed habitat can be described by this model. In this model, and are the population densities of the prey (for example, the number or the biomass of rabbits per square kilometre) and predator (for example, the number or the biomass of foxes per square kilometre), respectively. describes the growth rate of the maximum prey per capita; the product is the per capita predation rate; is the carrying capacity of the habitat for the prey (that is, for the rabbit–fox interaction, the maximal number, or the maximal biomass, of rabbits that the habitat can sustain). is the predator’s per capita death rate in the absence of prey, whereas the product represents the the effect of the presence of prey on the predator’s per capita growth rate. All model parameters are positive.
The properties of the model are well studied. Specifically, the model has three equilibria, namely (i) the zero equilibrium , (ii) the predator-free equilibrium on the x-axis, and (iii) the positive equilibrium , where both species coexist. Coordinates and are defined by the equalities
with the solution
Here, the parameter has a transparent biological meaning: it is the predator’s basic reproduction number, i.e., the number of predator offspring produced per capita that reach the reproductive age under the most favourable conditions when and . The concept of the basic reproduction number originated in infectious disease dynamics, where it is proven to be exceptionally successful. We believe that this concept is very convenient in modelling population dynamics as well.
The principal global asymptotic properties of model (1) are summarized by the following theorem [1,3]:
Theorem 1.
For system (1), the following statements are true:
- (1)
- If , then the coexisting equilibrium exists and is globally asymptotically stable, while the predator-free equilibrium is unstable (a saddle point).
- (2)
- If , then system (1) has no coexisting equilibrium state, and the equilibrium is globally asymptotically stable.
- (3)
- The zero equilibrium is always unstable (a saddle point).
A principal property of the deterministic Lotka–Volterra model is its persistence. At the same time, it was observed that in real-life biosystems species can go extinct due to stochastic fluctuations (e.g., [6]). The objectives of this paper are to analytically study how stochastic effects affect the model’s persistence and species extinction. We consider, therefore, the Lotka–Volterra model under stochastic perturbations of the white noise type that are postulated proportional to the system’s current state. This type of perturbation appears to be the most natural for models motivated by biological applications (cf. [6,7,8,9,10]).
Stochastically perturbed Lotka–Volterra models attracted significant attention, and a number of important insights into their long-term dynamics were obtained (see, e.g., [6,9,10,11] and the references therein). In particular, F. Vadillo [6] numerically studied the mean-extinction time for three different Lotka–Volterra stochastic models. In order to do this, the author formulated the backward Kolmogorov equation for these three models, and then solved the equation numerically, employing sophisticated computational techniques. R. Rudnicki [9] considered the long-term dynamics of a stochastically perturbed Lotka–Volterra model, where the random noise for both populations was postulated as correlated. While such an assumption may to some extent model the situation when the same factor (such as, for example, an epidemic disease) equally affects both the prey and predator populations, the authors of this paper still believe that a model with this assumption represents a rather limiting case and the assumption seriously downgrades the value of the results. Nevertheless, the technique employed in the paper, as well as the results obtained, is still of interest. To study the long-term properties of the model, in [9] the stochastic system was reformulated as the Fokker–Planck equation, and then properties of the latter were studied. In particular, it was established that the equation has an asymptotically stable stationary continuous density distribution. M. Liu and M. Fan [11] suggested a new definition of permanence for stochastic population models that implies their persistence, and then explored the permanence of two-dimensional stochastic Lotka–Volterra systems including the systems with cooperation, competition and predation. Some sufficient criteria of the permanence (and, hence, of the persistence) were established. R. Khasminskii and F.C. Klebaner [10] considered properties of the so-called “first” Lotka–Volterra model that postulate the unlimited growth of the prey. We have to remark that this deterministic model is structurally unstable; this fact makes its application to real-life biosystems, as well as the application of stochastically perturbed models based on this model, rather dubious. Nevertheless, the analytical technique applied in [10], as well as the results obtained, can still be of certain interest. In particular, the authors show that, for this model, for small initial population sizes and for comparatively small perturbations, for a vast majority of time one of the populations remains very small, but, at the same time, never comes closer than exponentially close to zero. (That is, the system is weakly persistent.) At the same time, due to its structural instability, for large initial population sizes, the model is hardly suitable, because it leads to ever-increasing fluctuations in population sizes.
In this paper, to explore the persistence or stochastic extinction in the stochastic model, we apply a method that was recently developed by the authors [7,8]. This approach is based on the direct Lyapunov method [12] and, in particular, on the development of the ideas of R.Z. Khasminskii [13]. Specifically, in line with Khasminskii’s idea, we suggest that the sufficient conditions for the stochastic extinction are the conditions for the reversion of the stability of the trivial equilibrium state (so called “stabilization by noise”). The application of this idea to the model enables us to establish the precise sufficient conditions for species extinction (and, hence, the precise necessary conditions for persistence).
To apply the Khasminskii idea to the models originated in mathematical biology, we extended this idea to multi-dimensional nonlinear systems and exploited the concept of the stability of invariant sets. That is, instead of the stability of the trivial equilibrium state of a linear 1-dim stochastic equation, as in [13], we explore the stability of the coordinate axes of a nonlinear stochastic system.
2. Predator–Prey Model under Stochastic Perturbations
Let be a complete probability space; be a nondecreasing family of sub--algebras of , i.e., for ; and be the mathematical expectation with respect to the measure .
Let us assume that model (1) is influenced by stochastic perturbations that are of the white noise type and are of magnitudes proportional to the current population size. Then, the system of ordinary differential Equation (1) transforms to the following system of Ito’s stochastic differential equations (SDEs) [14]:
Here, and are constants, and and are the mutually independent -adapted standard Wiener processes.
Before we proceed to the model analysis, let us recall the basic definition of persistence and extinction that is equally applicable to systems (1) and (4) (cf. [15,16,17]):
Definition 1.
Species x is weakly persistent if, for all , .
- Species x is persistent if, for all , .
- Species x is uniformly persistent if, for all , .
- Species x is extinct if, for all , .
The same definitions are applicable for species y.
By the term “stochastic extinction”, we imply extinction due to stochastic processes only. That is, stochastic extinction occurs under the conditions when the corresponding deterministic system is persistent.
Lemma 1.
The positive quadrant is an invariant set of stochastic system (4).
For proof, it is enough to note that the solution of system (4) is presented in the following form [14]:
Lemma 2.
Proof.
That is, ensures that for all , . By Dynkin’s formula [14],
inequality for implies that . That is, for all and , Lyapunov function decreases as t grows. Therefore, the mathematical expectation of the solutions with positive initial conditions converge to region M and remain there. □
We would like to remind the reader that is the environment’s carrying capacity for the prey. Lemma 2 implies that, due to stochastic fluctuations, in system (4) the mathematical expectation for the prey population exceeds the deterministic carrying capacity K and varies within the range . This fact indicates a necessity to introduce, alongside the deterministic carrying capacity K, the stochastic carrying capacity
Using this notation, set . Furthermore, the concept of the stochastic carrying capacity naturally leads to the concept of the stochastic predator’s basic reproduction number:
Lemma 3.
If , then the zero equilibrium is stable in probability.
Proof.
Using the Lyapunov function , for all we have
Therefore, semi-axis (as a solution of the first equation of system (4)) is stable in probability [13].
Next, consider Lyapunov function , if , and , if . If , then
From the arguments above, it follows that and, hence, the condition ensures that inequality holds for all .
If , then Lyapunov function satisfies
It was shown in [7] that the condition is the necessary condition for the prey’s persistence. It is hardly surprising that the extinction of prey immediately leads to the extinction of predators.
The authors would also like to mention that Lyapunov functions of the type that was used in the proof were invented by R.Z. Khasminskii [13]. The inversion of the stability for larger perturbations, such as those Lemma 3 describes, is usually referred to as stabilization by noise.
Lemma 4.
If and , then for the system of stochastic differential Equation (4) the set (an interval on the positive semi-axis ) is stable in probability.
Proof.
From (6), for Lyapunov function , we have that holds for all , . Therefore, the solution of the second equation of system (4) is stable in probability. Additionally, ensures that . Additionally, by Lemma 2, for all positive initial conditions, there is a finite such that holds for all .
That is, the lemma hypotheses ensure that holds for all positive initial conditions and for . This completes the proof. □
Summarizing the statements in Lemmas 3 and 4, we come to the following theorem.
Theorem 2.
- (1)
- Conditions and are sufficient conditions for prey stochastic extinction (the extinction in probability).
- (2)
- If , then both species, namely, the prey and the predator, go extinct (in probability).
- (3)
- is necessary for the stochastic system’s persistence.
- (4)
- and either or are necessary for the predator’s persistence.
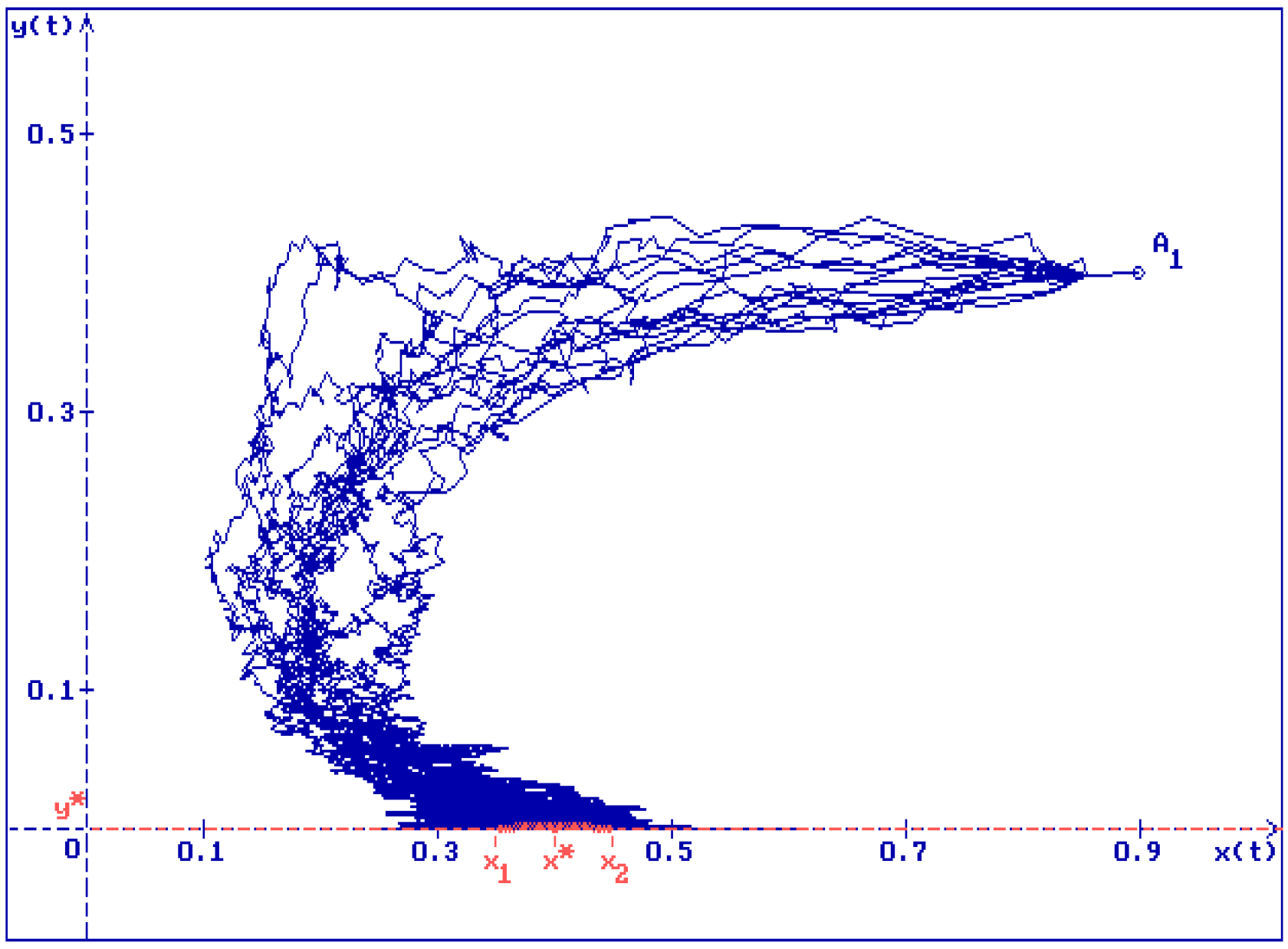
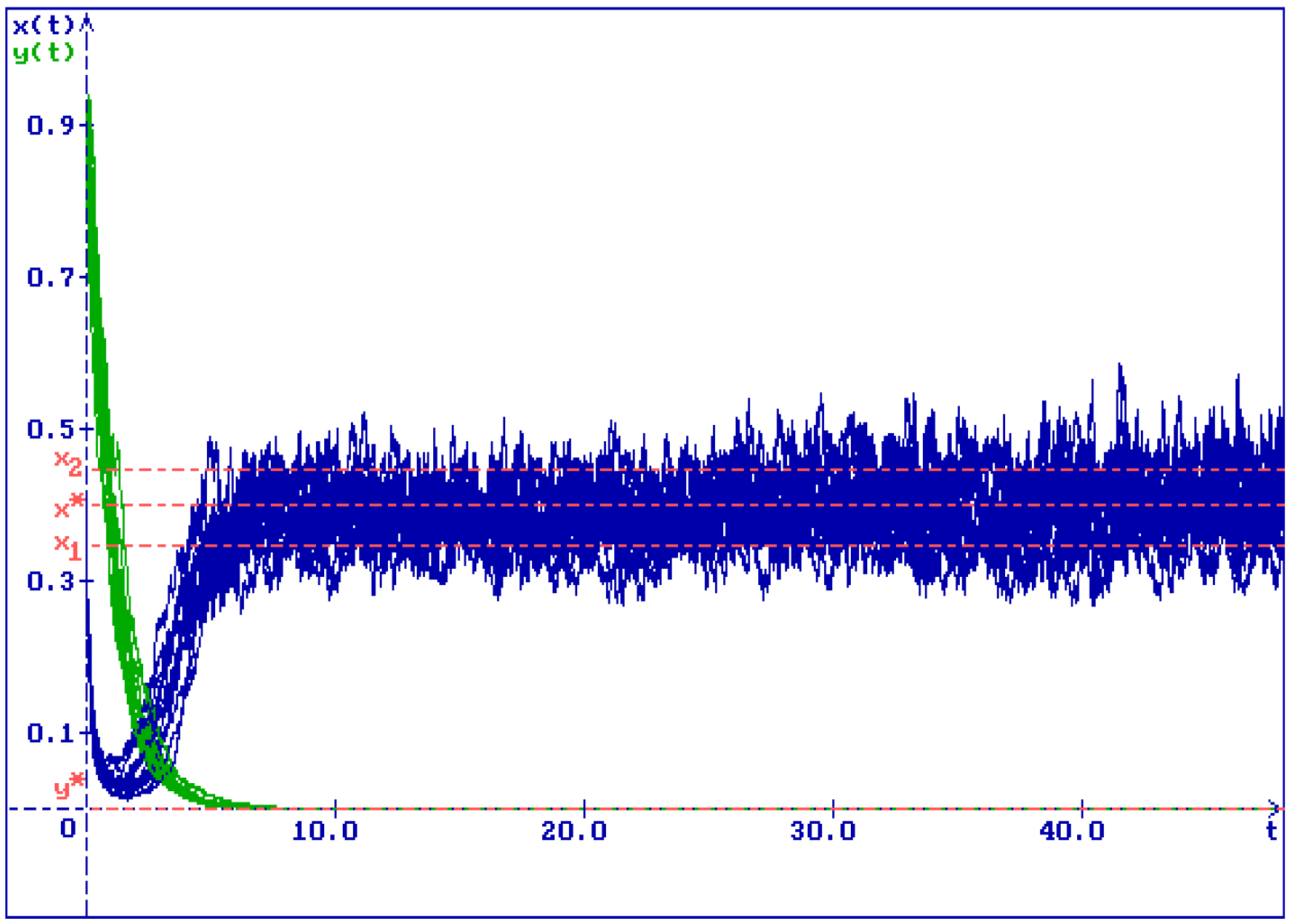
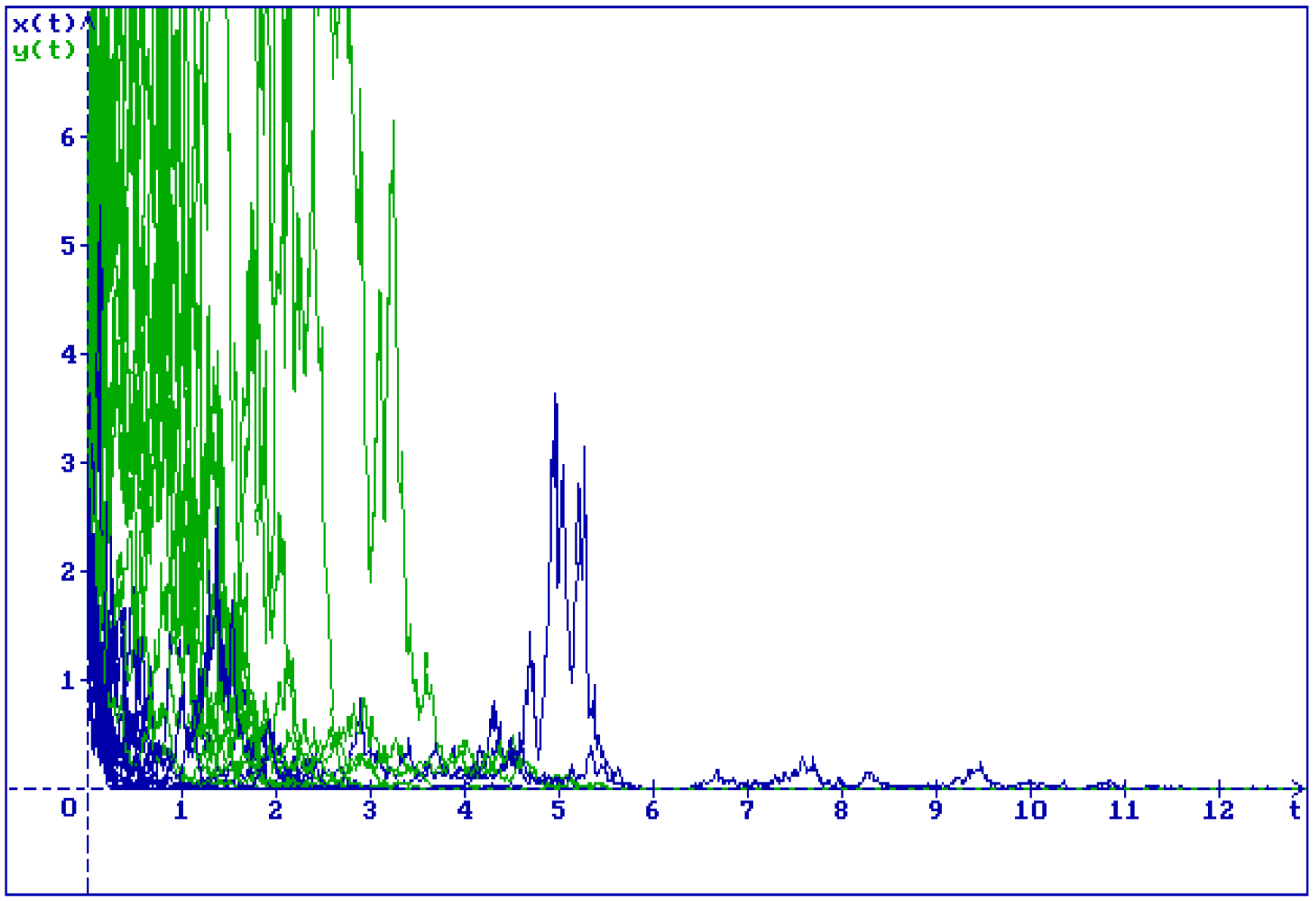
Figure 1 and Figure 2 illustrate predator extinction due to stochastic perturbations for the case and , respectively. Figure 3 illustrates the stochastic extinction of both species for the case of and .
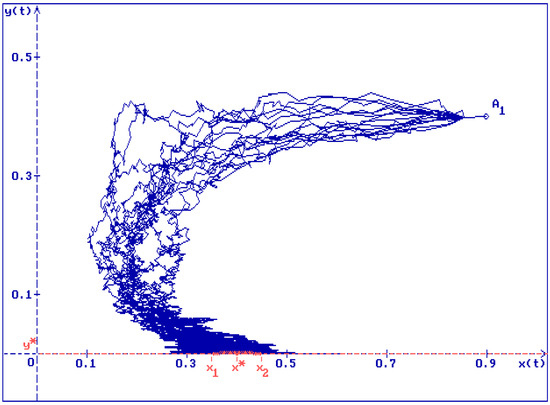
Figure 1.
Fifteen trajectories of the solution of system (4) with , , , , , , , and the initial conditions at point . In this picture, it is easy to see that the predator species goes extinct, whereas prey persists. Accordingly, all trajectories converge to interval , with the equilibrium in the centre of the interval, on the x-axis, oscillating around this interval thereafter.
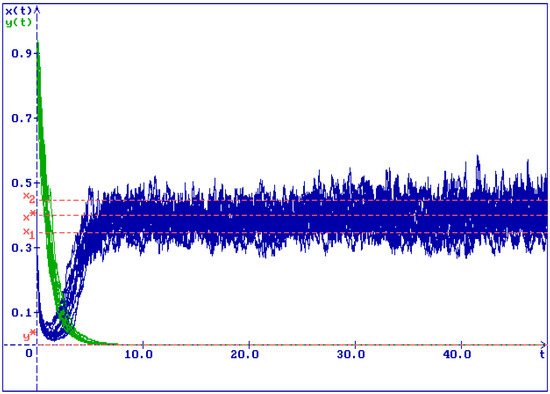
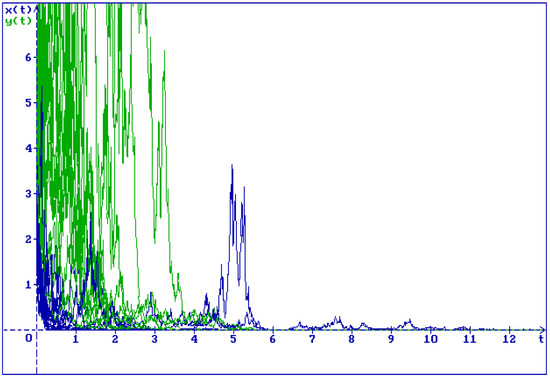
Figure 3.
Fifteen trajectories of the solution of system (4) for , , , , , , , and for initial conditions . All trajectories of (blue lines) and (green lines) converge to zero.
Note that for the numerical simulation of the Wiener process trajectories, a special algorithm described in detail in [12] was used.
The authors would like to attract readers’ attention to the fact that in Figure 1 and Figure 2, as , the prey population oscillates around a certain interval . (In Figure 1 and Figure 2, .) In fact, in the absence of the predator (that is, for ), the first equation of the system of stochastic differential Equation (4) is equivalent to the stochastically perturbed logistic equation of a single population’s growth that was studied by the authors in [7]. In [7], for this equation the authors established the existence of a stable mean interval on the x-axis and showed that the trajectories oscillate around this interval. (In the notation of this paper, the interval is .) Recalling that the x-axis is an invariant set of system (4) and that solutions are continuous, it is easy to see, that, as , the solution of system (4) tends to that on the x-axis, and, hence, the interval in Figure 1 and Figure 2 corresponds to the stable interval found in [7].
3. Conclusions
In this paper, employing a technique recently developed by the authors based upon the ideas of R.Z. Khasminskii, we found precise sufficient conditions for stochastic species extinction and, thereby, the precise necessary conditions for species persistence for the classical Lotka–Volterra predator–prey model under stochastic perturbations proportional to the system’s current state. Please note that the conditions found for the extinction are sufficient, in probability. For this model, stochastic extinction necessarily occurs as a result of a phenomenon known as stabilization by noise, and the conditions found in this paper are, in fact, the conditions for the reversion of the stability of the corresponding coordinate subspaces. This ensures that the conditions in this paper are the precise sufficient conditions for extinction, and, hence, the precise necessary conditions for species persistence.
We would like to stress that the technique used in this paper can be applied for more complicated models (including nonlinear models), as well as for higher-dimension models.
Author Contributions
Conceptualization, L.S. and A.K.; methodology, L.S. and A.K.; software, L.S. and A.K.; validation, L.S. and A.K.; formal analysis, L.S. and A.K.; investigation, L.S. and A.K.; resources, L.S. and A.K.; data curation, L.S. and A.K.; writing—original draft preparation, L.S. and A.K.; writing—review and editing, L.S. and A.K.; visualization, L.S. and A.K.; supervision, L.S. and A.K.; project administration, L.S. and A.K.; funding acquisition, L.S. and A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Volterra, V. Lesons sur la Theorie Mathematique de la Lutte Pour la Vie; Gauthier-Villars: Paris, France, 1931. [Google Scholar]
- Freedman, H.I. Deterministic Mathematical Models in Population Ecology; Marcel Dekker: New York, NY, USA, 1980. [Google Scholar]
- Murray, J.D. Mathematical Biology; Springer: Berlin/Heidelberg, Germany, 1989. [Google Scholar] [CrossRef]
- Brauer, F.; Castillo-Chavez, C. Mathematical Models in Population Biology and Epidemiology; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Goh, B.S. Global stability in two species interactions. J. Math. Biol. 1976, 3, 313–318. [Google Scholar] [CrossRef] [PubMed]
- Vadillo, F. Comparing stochastic Lotka-Volterra predator-prey models. Appl. Math. Comput. 2019, 360, 181–189. [Google Scholar] [CrossRef]
- Korobeinikov, A.; Shaikhet, L. Global asymptotic properties of a stochastic model of population growth. Appl. Math. Lett. 2021, 121, 107429. [Google Scholar] [CrossRef]
- Shaikhet, L.; Korobeinikov, A. Asymptotic properties of the Lotka-Volterra competition and mutualism model under stochastic perturbations. Math. Med. Biol. J. IMA 2024, 41, 19–34. [Google Scholar] [CrossRef] [PubMed]
- Rudnicki, R. Long-time behaviour of a stochastic prey-predator model. Stoch. Process. Their Appl. 2003, 108, 93–107. [Google Scholar] [CrossRef]
- Khasminskii, R.Z.; Klebaner, F.C. Long term behavior of solutions of the Lotka-Volterra system under small random perturbations. Ann. Appl. Probab. 2001, 11, 952–963. [Google Scholar] [CrossRef]
- Liu, M.; Fan, M. Permanence of Stochastic Lotka-Volterra Systems. J. Nonlinear Sci. 2017, 27, 425–452. [Google Scholar] [CrossRef]
- Shaikhet, L. Lyapunov Functionals and Stability of Stochastic Functional Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Khasminskii, R.Z. Stochastic Stability of Differential Equations; Springer: Berlin/Heidelberg, Germany, 2012; (In Russian, Nauka, Moscow, 1969). [Google Scholar]
- Gikhman, I.I.; Skorokhod, A.V. Stochastic Differential Equations; Springer: Berlin/Heidelberg, Germany, 1972. [Google Scholar]
- Butler, H.; Freedman, I.; Waltman, P. Uniformly persistent systems. Proc. Am. Math. Soci. 1986, 96, 425–430. [Google Scholar] [CrossRef]
- Freedman, H.I.; Moson, P. Persistence definitions and their connections. Proc. Am. Math. Soci. 1990, 109, 1025–1033. [Google Scholar] [CrossRef]
- Smith, H.L.; Thieme, H.R. Dynamical Systems and Population Persistence; AMS: Providence, RI, USA, 2011. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).