
Research on Auxetic Lattice Structure for Impact Absorption in Machines and Mechanisms

Abstract
1. Introduction
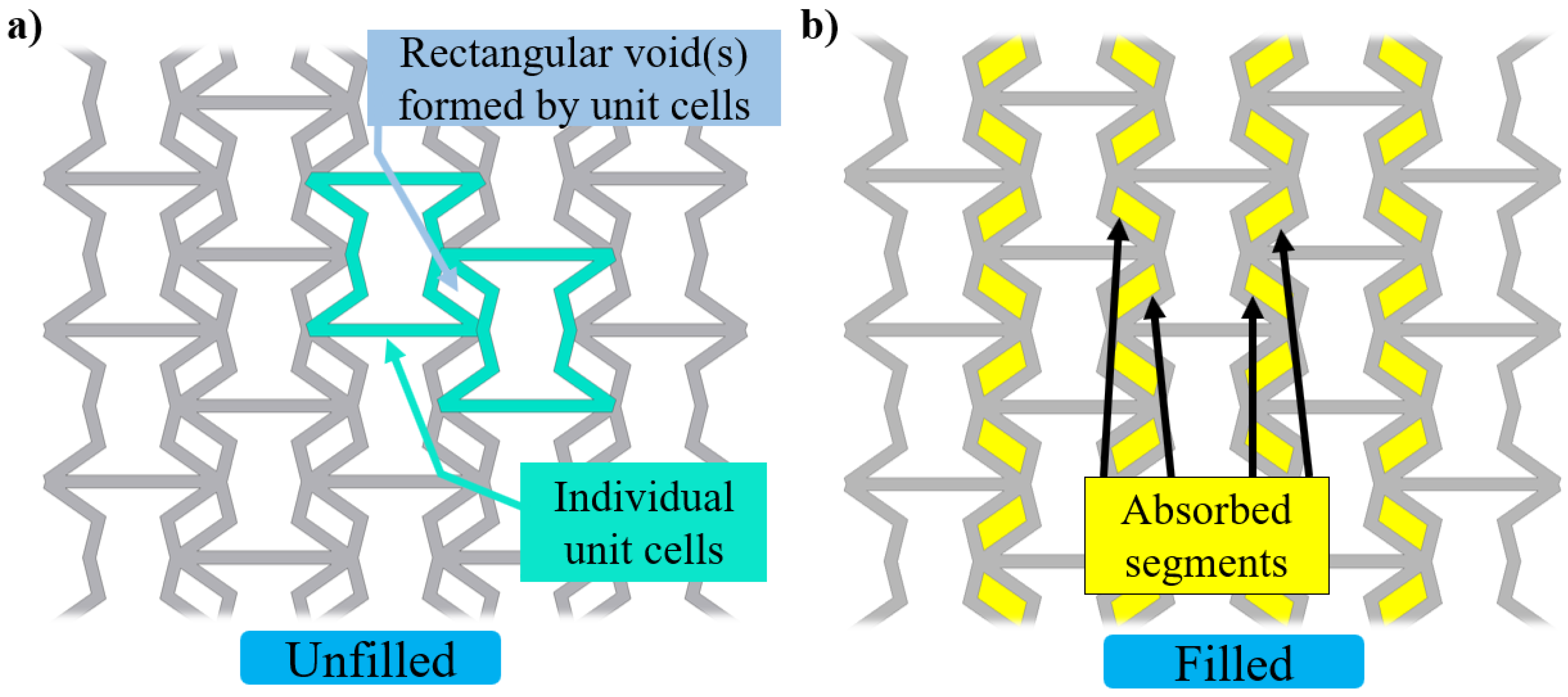
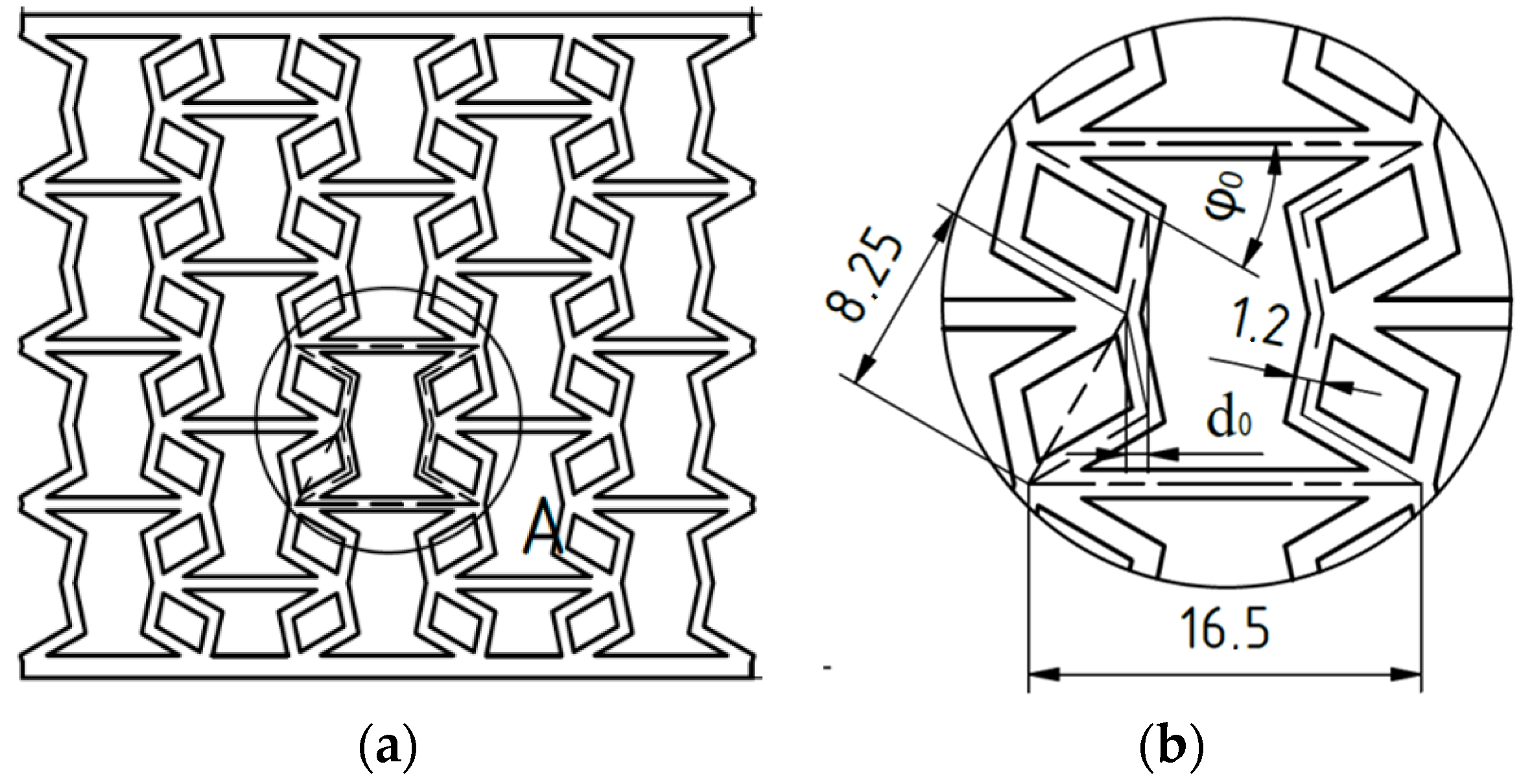
2. Models of Filled and Unfilled Structures
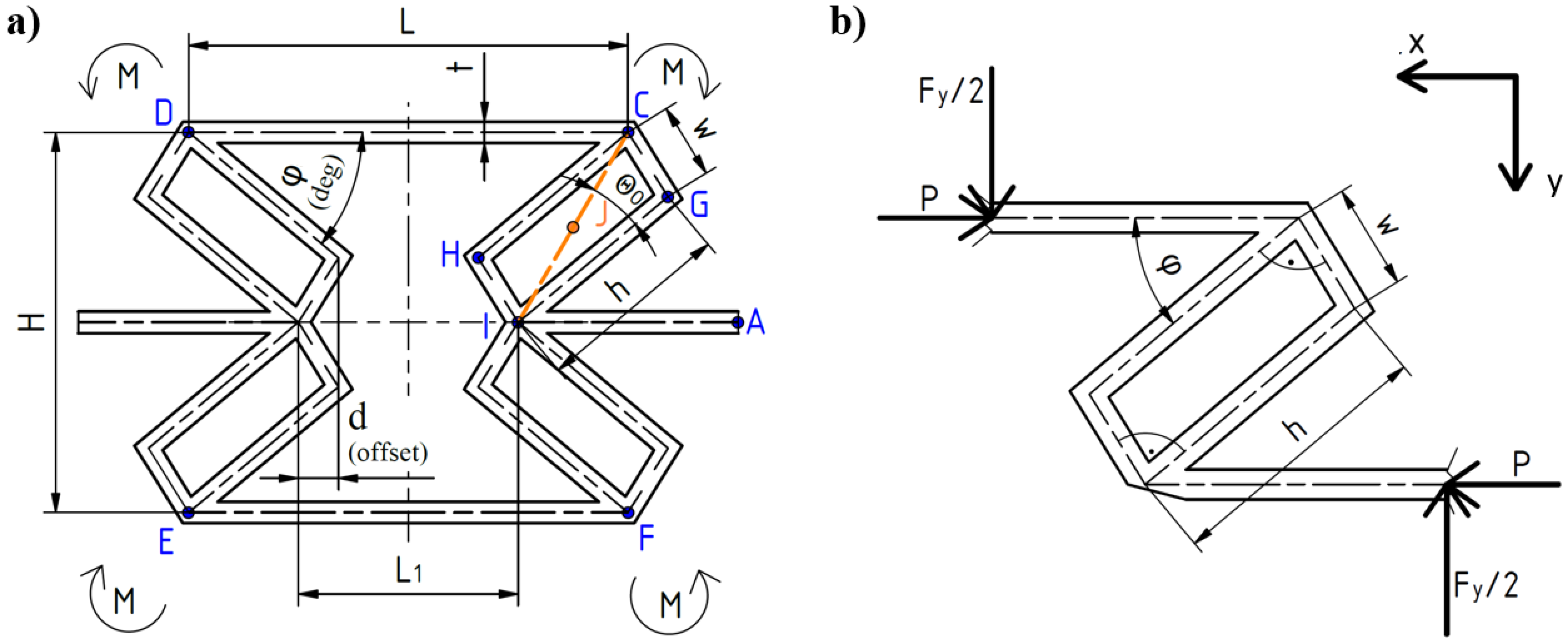
2.1. Auxetic Deformation of the Structure
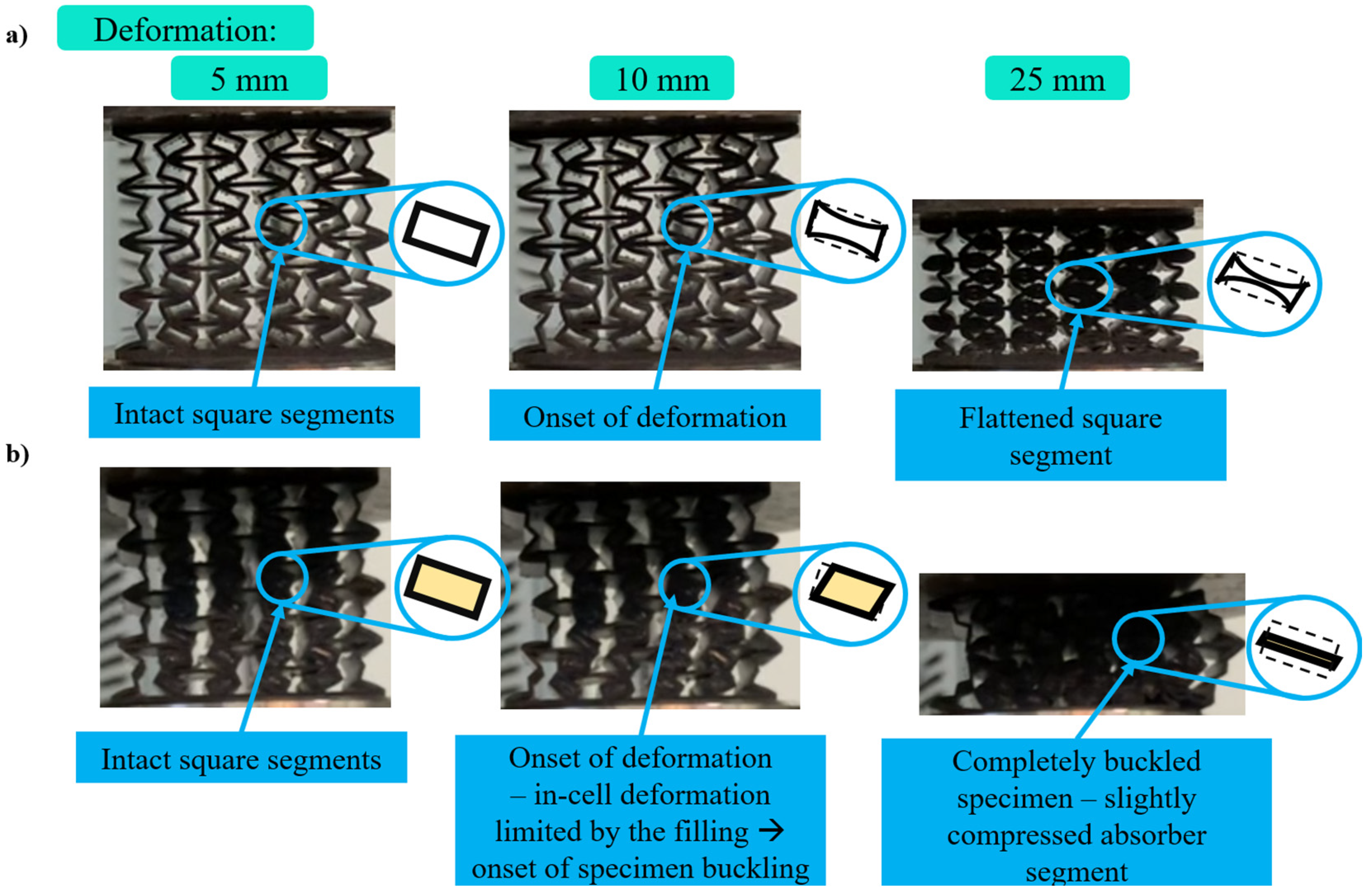
2.2. Shape Variation of the Absorber Unit and Buckling of the Beam-Like Structure
3. Experimental Research and Results
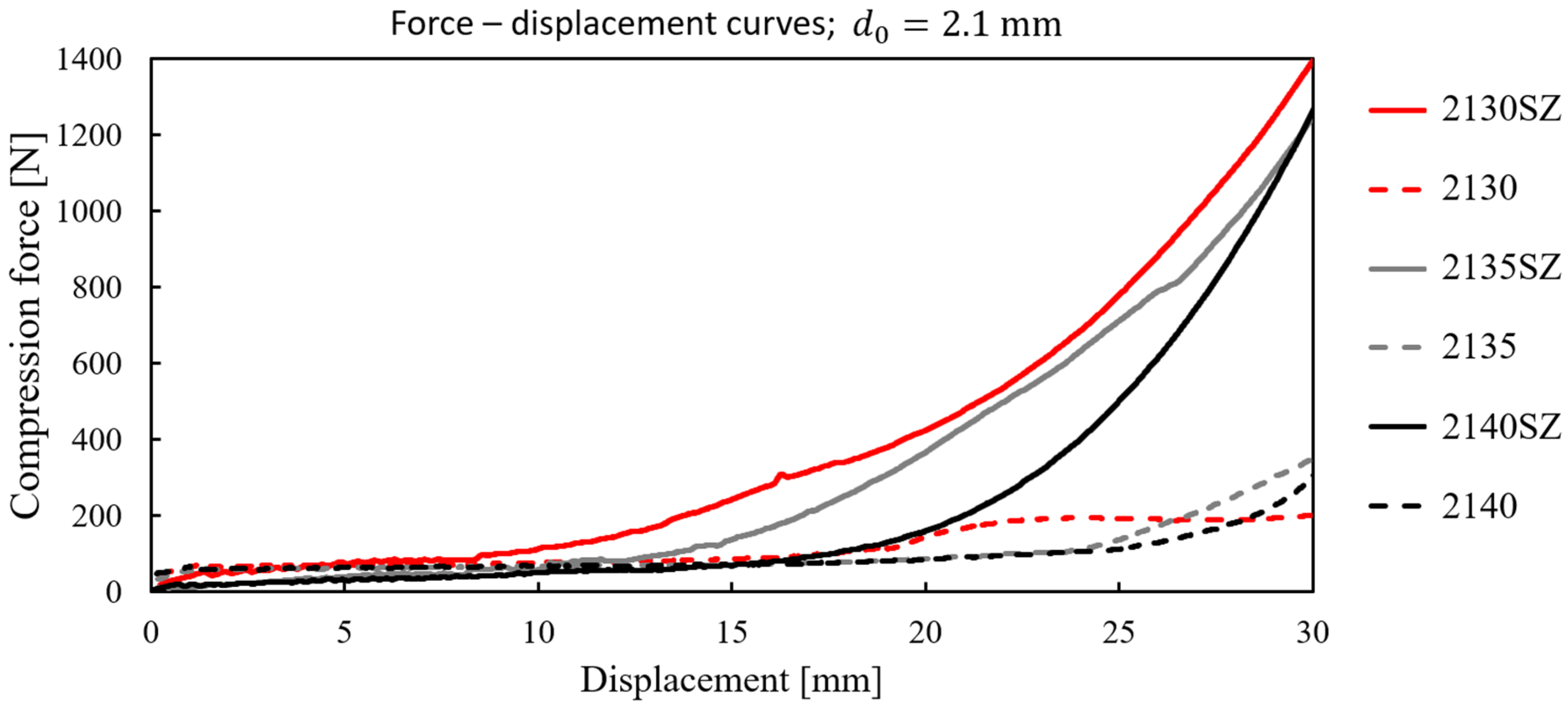
3.1. Testing of Specimens on Compression: Force-Displacement Curves
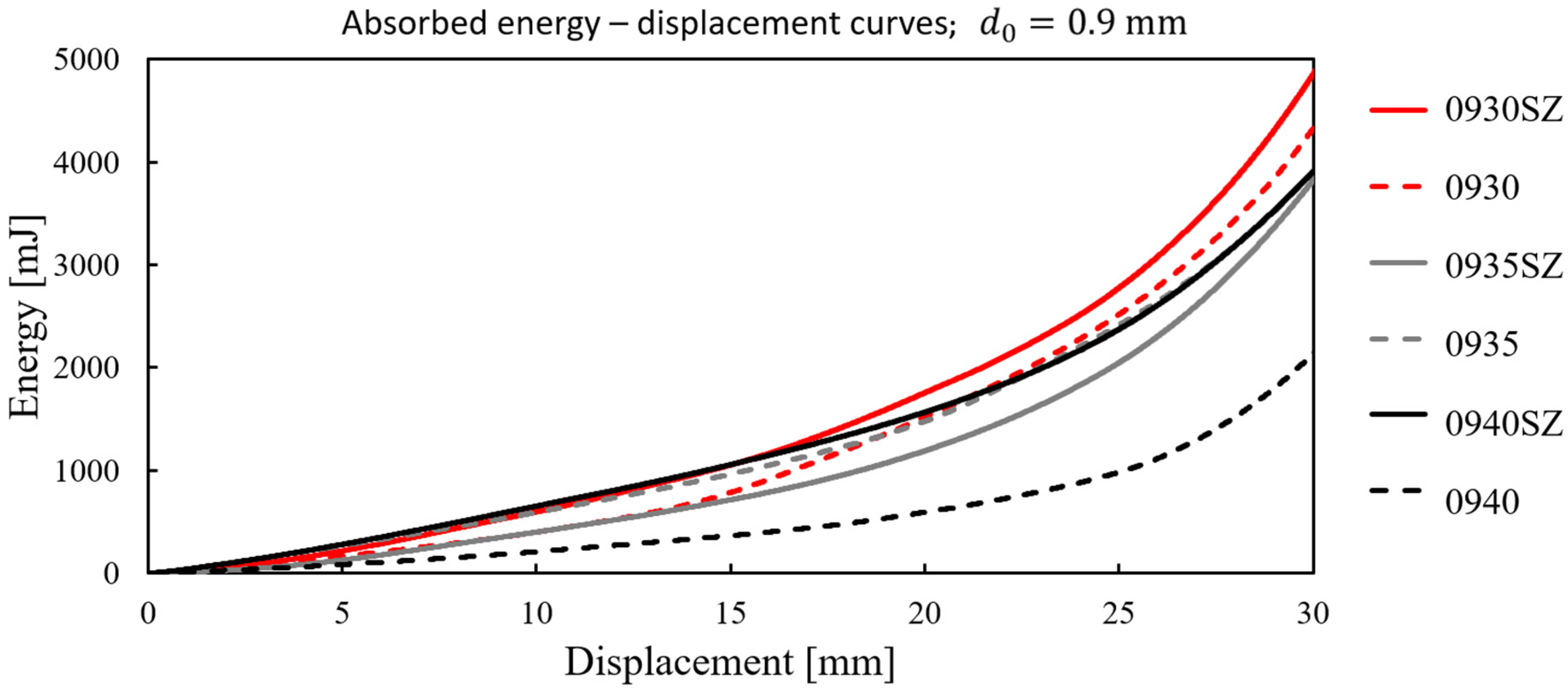
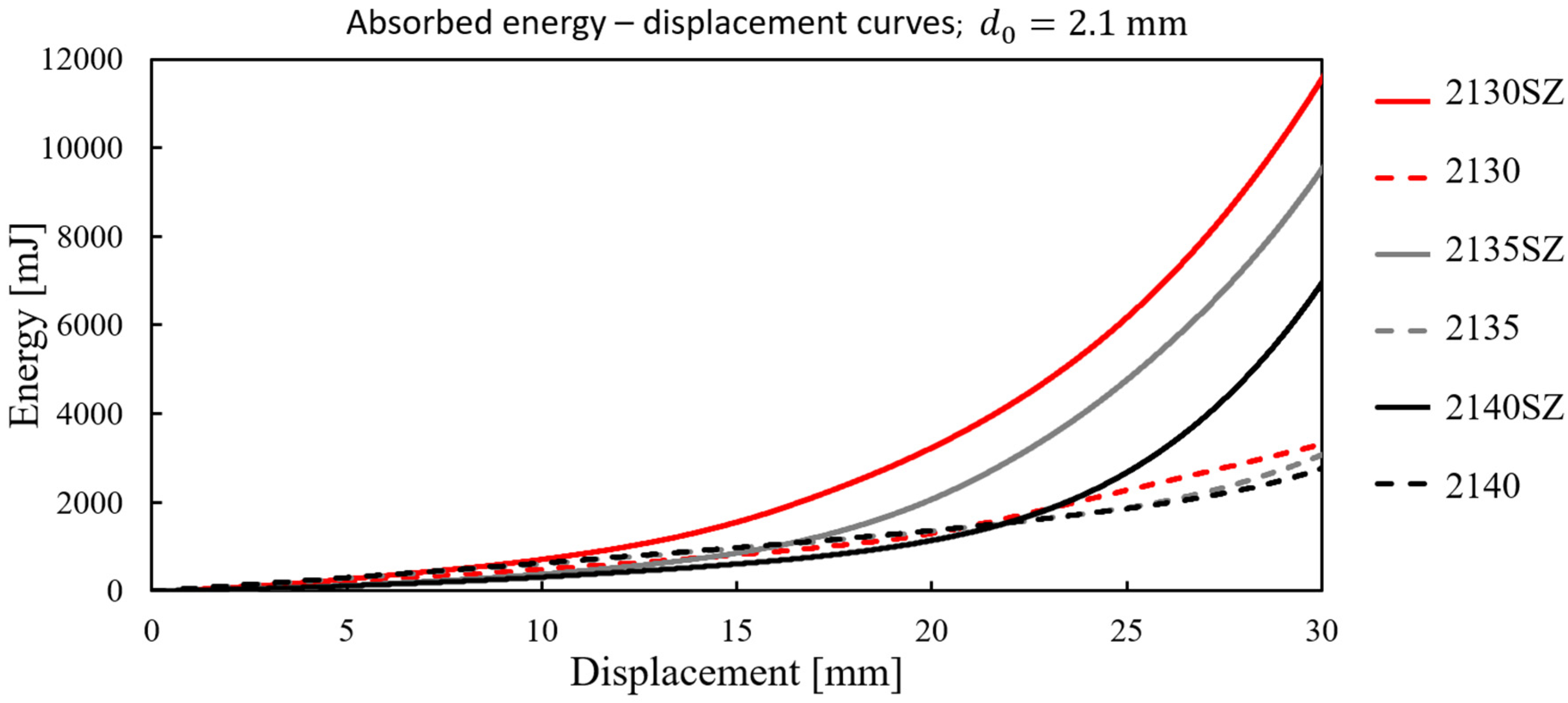
3.2. Absorbed Energy-Displacement Curves
3.3. Specific Absorbed Energy
3.4. Explanation of Energy Absorption
3.5. Statistical Indication of Significance of Deg and Offset Parameters
4. Conclusions
- Specimens exhibit two significantly different deformation behaviors: buckling and continuous auxetic (preferred). Filling has a negative effect on the deformation behavior: During deformation, the silicone filled voids limit the in-cell deformation (for = 0.9–1.5 mm) and this results in specimen buckling. However, for higher offset values (), compaction occurs more even throughout the geometry; thus, buckling will not occur even with filled structure.
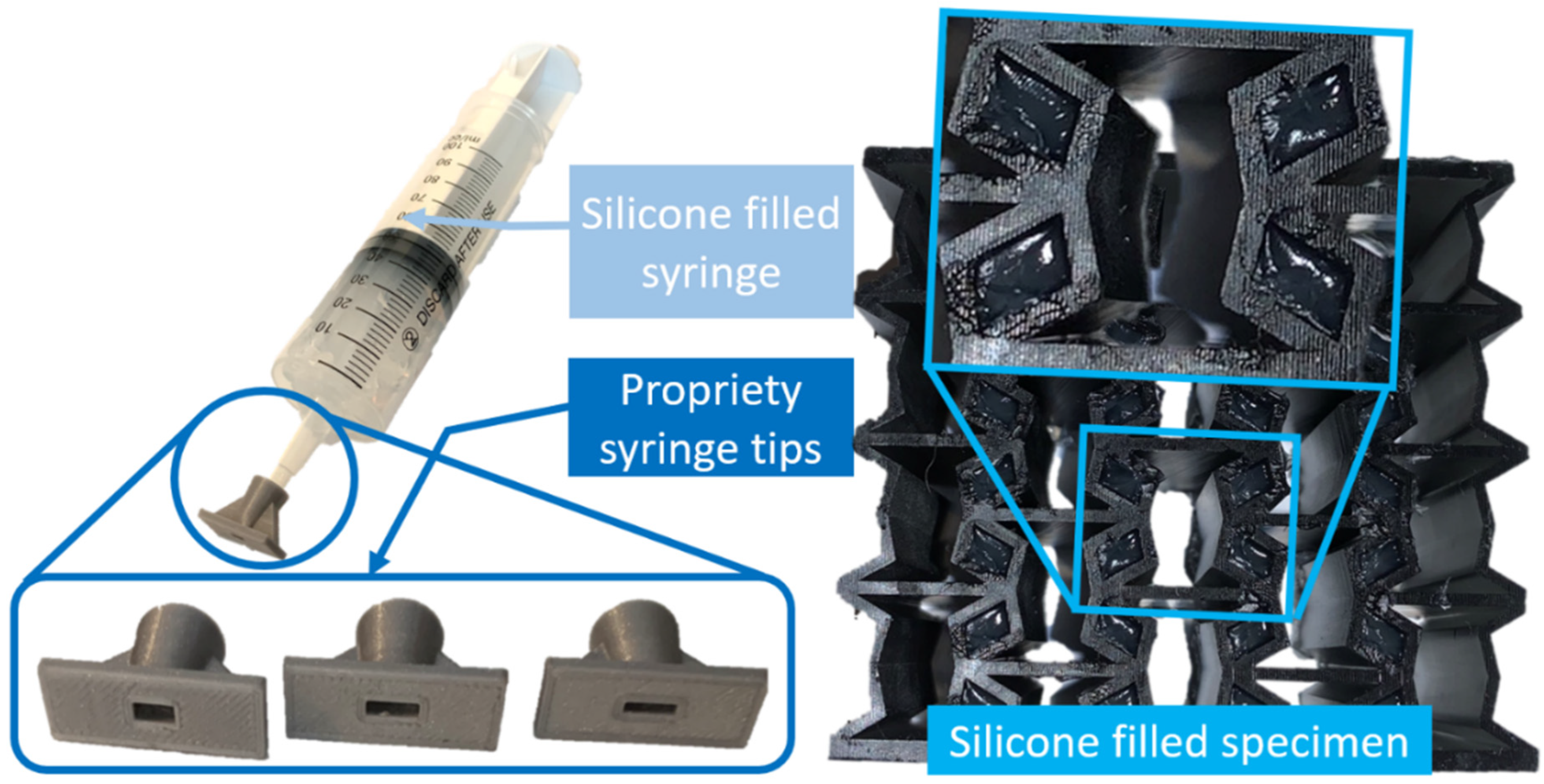
- Owing to the silicon filling, a new structure applicable for energy dissipation is obtained. The coupled combination aims to significantly improve the energy absorption capacity and to achieve a deformation-induced hardening characteristic. Compared to the unfilled control group, it was found that the filled structure demonstrates an increase in energy absorption. Silicone filled specimens can absorb up to 2.5 times more energy. The energy absorption depends on the geometry and rigidity of the structure.
- The filled structure increases the rigidity of the specimens with the increase in the offset value. The absorbed energy ratio between filled and unfilled structures increases with the increase in the offset value. Thus, for offset of 0.9, the average absorbed energy ratio is 1; for 1.5 mm, it is 1.3; and for 2.1 mm, it is 2.4.
- The deg parameter, used to characterize the geometrical modification, effects the specimen’s energy absorption capability. The energy absorption capability decreases with a decreasing deg value. The ratio of energy absorption of filled to unfilled specimens varies with the angle value: for 30 degrees, it is 1.7; for 40 degrees, it is 1.2; and for 45 degrees, it is 1.7.
- Based on the research, it is concluded that the filled specimen 2130SZ has the best energy absorption property. The complex behavioral mechanism of the 2130SZ specimen is very beneficial for impact protection. At the beginning of the impact process, the structure absorbs the energy with great deformation and slows down the displacement. After that, the impact energy is intensively absorbed. By achieving a deformation-induced hardening characteristic, the collision energy can be sufficiently absorbed. It makes the structure beneficially applicable for the protection against impact. However, certain applications may require easier compressibility and smaller energy absorption. Then, the specimens may have other properties that can be considered as optimal for that specific application.
- Finally, the aforementioned researched filled structure is recommended to be applied in energy absorbing and damping devices in machines and mechanisms.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| , | [] | Cross section of absorber and of basic unit, respectively |
| [mm] | Thickness and width of the unit cell structure | |
| [mm] | Offset value of the until cell | |
| [MPa] | Modulus of elasticity of absorber and basic unit, respectively | |
| [−] | Force–displacement function | |
| [N] | Critical buckling force | |
| [N] | Force in y direction | |
| [mm] | Height, width, and inner width of the unit cell, respectively | |
| [mm] | Height and width of the absorber segment, respectively | |
| , | [] | Moment of inertia of the absorber and basic unit |
| [mJ] | Absorbed energy | |
| [mJ/g] | Specific absorbed energy | |
| [mm] | Total heigh of the beam-line series of absorbers | |
| [g] | Mass of a specimen | |
| [Nm] | Moment between unit cells | |
| [N] | Virtual force | |
| [J] | Total strain energy | |
| [mm] | Displacement in x and y direction | |
| , | [mm] | Maximal deflection in x and y direction |
| , | [−] | Average strain in x and y direction, respectively |
| [−] | Effective Poisson’s ratio of the unit cell | |
| , | [MPa] | Far field stress in the x and y direction |
| [] | deg angle value of the unit cell |
References
- Jafari, M.H.A.; Zarastvand, M.R.; Zhou, J. Doubly curved truss core composite shell system for broadband diffuse acoustic insulation. J. Vib. Control 2023, 2023, 17. [Google Scholar] [CrossRef]
- Nema, V.; Jakab, A.; Molnar, J.; Szabo, B.; Szoke-Trenyik, E.; Mihalko, J.; Szabo, B.P. Behaviour of flexible/elastic materials under quasi-static force. Analecta Tech. Szeged. 2023, 17, 9–15. [Google Scholar] [CrossRef]
- Fleck, N.A.; Deshpande, V.S.; Ashby, M.F. Micro-architectured materials: Past, present and future. Proc. R. Soc. A Math. Phys. Eng. Sci. 2010, 466, 2495–2516. [Google Scholar] [CrossRef]
- Barthelat, F. Architectured materials in engineering and biology: Fabrication, structure, mechanics and performance. Int. Mater. Rev. 2015, 60, 413–430. [Google Scholar] [CrossRef]
- Yin, H.; Zhang, W.; Zhu, L.; Meng, F.; Liu, J.; Wen, G. Review on lattice structures for energy absorption properties. Compos. Struct. 2023, 304, 116397. [Google Scholar] [CrossRef]
- Cho, H.; Seo, D.; Kim, D.N. Mechanics of auxetic materials. In Handbook of Mechanics of Materials; Springer: Singapore, 2019; pp. 733–757. [Google Scholar] [CrossRef]
- Rad, M.S.; Hatami, H.; Alipouri, R.; Nejad, A.F.; Omidinasab, F. Determination of energy absorption in different cellular auxetic structures. Mech. Ind. 2019, 20, 302. [Google Scholar] [CrossRef]
- Liu, J.; Chen, T.; Zhang, Y.; Wen, G.; Qing, Q.; Wang, H.; Sedaghati, R.; Xie, Y.M. On sound insulation of pyramidal lattice sandwich structure. Compos. Struct. 2019, 208, 385–394. [Google Scholar] [CrossRef]
- Yin, S.; Chen, H.; Wu, Y.; Li, Y.; Xu, J. Introducing composite lattice core sandwich structure as an alternative proposal for engine hood. Compos. Struct. 2018, 201, 131–140. [Google Scholar] [CrossRef]
- Wang, C.Y.; Li, Y.; Zhao, W.Z.; Zou, S.C.; Zhou, G.; Wang, Y.L. Structure design and multi-objective optimization of a novel crash box based on biomimetic structure. Int. J. Mech. Sci. 2018, 138–139, 489–501. [Google Scholar] [CrossRef]
- Spadoni, A.; Ruzzene, M. Numerical and experimental analysis of the static compliance of chiral truss-core airfoils. J. Mech. Mater. Struct. 2007, 2, 965–981. [Google Scholar] [CrossRef]
- Wu, S.; Sikdar, P.; Bhat, G.S. Recent progress in developing ballistic and anti-impact materials: Nanotechnology and main approaches. J. Mod. Def. Technol. 2023, 21, 33–61. [Google Scholar] [CrossRef]
- Foster, L.; Peketi, P.; Allen, T.; Senior, T.; Duncan, O.; Alderson, A. Application of auxetic foam in sports helmets. Appl. Sci. 2018, 8, 354. [Google Scholar] [CrossRef]
- Reddy, A.H.; Davuluri, S.; Boyina, D. 3D Printed Lattice Structures: A Brief Review. In Proceedings of the 2020 IEEE 10th International Conference Nanomaterials: Applications & Properties (NAP), Sumy, Ukraine, 9–13 November 2020; pp. 02SAMA10-1–02SAMA10-5. [Google Scholar] [CrossRef]
- Chahar, A.S.; Pal, P. Study on various properties of reinforced concrete—A review. Mater. Today Proc. 2022, 65, 597–602. [Google Scholar] [CrossRef]
- Yang, Z.-M.; Chen, J.; Wang, F.; Wang, J. Seismic performance of circular concrete-filled steel tube columns reinforced with inner latticed steel angles. J. Constr. Steel Res. 2023, 205, 107908. [Google Scholar] [CrossRef]
- Liu, Y.-S.; Zhou, X.-H.; Wang, Y.-H.; Zhou, Y.; Lan, Y.-S.; Li, Q. Seismic behavior of prestressed concrete filled steel tubular lattice tower subjected to combined compression-bending-torsion. J. Constr. Steel Res. 2023, 204, 107883. [Google Scholar] [CrossRef]
- Yang, L.; Fang, H.; Xie, H.; Li, B. Compressive behaviour of concrete-filled multi-cell GFRP pultruded square columns reinforced with lattice-webs. Eng. Struct. 2023, 279, 115584. [Google Scholar] [CrossRef]
- Parandoush, P.; Lin, D. A review on additive manufacturing of polymer-fiber composites. Compos. Struct. 2017, 182, 36–53. [Google Scholar] [CrossRef]
- Blok, L.G.; Longana, M.L.; Yu, H.; Woods, B.K.S. An investigation into 3D printing of fibre reinforced thermoplastic composites. Addit. Manuf. 2018, 22, 176–186. [Google Scholar] [CrossRef]
- Yavas, D.; Liu, Q.; Zhang, Z.; Wu, D. Design and fabrication of architected multi-material lattices with tunable stiffness, strength, and energy absorption. Mater. Des. 2022, 217, 110613. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.S.; Schmidt, R.; Wu, L.Z.; Schröder, K.U. Compression and hysteresis responses of multilayer gradient composite lattice sandwich panels. Mar. Struct. 2021, 75, 102845. [Google Scholar] [CrossRef]
- Ramirez, B.J.; Misra, U.; Gupta, V. Viscoelastic foam-filled lattice for high energy absorption. Mech. Mater. 2018, 127, 39–47. [Google Scholar] [CrossRef]
- Taghipoor, H.; Eyvazian, A.; Musharavati, F.; Sebaey, T.A.; Ghiaskar, A. Experimental investigation of the three-point bending properties of sandwich beams with polyurethane foam-filled lattice cores. Structures 2020, 28, 424–432. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, B.; Ma, L.; Wu, L.; Pan, S.; Yang, J. Energy absorption and low velocity impact response of polyurethane foam filled pyramidal lattice core sandwich panels. Compos. Struct. 2014, 108, 304–310. [Google Scholar] [CrossRef]
- Tomlinson, D.; Fam, A. Axial response of flax fibre reinforced polymer-skinned tubes with lightweight foam cores and bioresin blend. Thin-Walled Struct. 2020, 155, 106923. [Google Scholar] [CrossRef]
- Wang, L.; Liu, W.; Fang, Y.; Wan, L.; Huo, R. Axial crush behavior and energy absorption capability of foam-filled GFRP tubes manufactured through vacuum assisted resin infusion process. Thin-Walled Struct. 2016, 98, 263–273. [Google Scholar] [CrossRef]
- Gao, G.; Hu, Y.; Jia, H.; Liu, P.; Du, P.; Xu, D. Acoustic and dielectric properties of epoxy resin/hollow glass microsphere composite acoustic materials. J. Phys. Chem. Solids 2019, 135, 109105. [Google Scholar] [CrossRef]
- Baroutaji, A.; Sajjia, M.; Olabi, A.G. On the crashworthiness performance of thin-walled energy absorbers: Recent advances and future developments. Thin-Walled Struct. 2017, 118, 137–163. [Google Scholar] [CrossRef]
- Hussein, R.D.; Ruan, D.; Lu, G.; Sbarski, I. Axial crushing behaviour of honeycomb-filled square carbon fibre reinforced plastic (CFRP) tubes. Compos. Struct. 2016, 140, 166–179. [Google Scholar] [CrossRef]
- Black, S.; Tzagiollari, A.; Mondal, S.; Dunne, N.; MacManus, D.B. Mechanical behaviour of gel-filled additively-manufactured lattice structures under quasi-static compressive loading. Mater. Today Commun. 2023, 35, 106164. [Google Scholar] [CrossRef]
- Prajapati, M.J.; Kumar, A.; Lin, S.-C.; Jeng, J.-Y. Multi-material additive manufacturing with lightweight closed-cell foam-filled lattice structures for enhanced mechanical and functional properties. Addit. Manuf. 2022, 54, 102766. [Google Scholar] [CrossRef]
- Prajapati, M.J.; Kumar, A.; Lin, S.-C.; Jeng, J.-Y. Reducing mechanical anisotropy in material extrusion process using bioinspired architectured lattice structures. Addit. Manuf. 2023, 66, 103480. [Google Scholar] [CrossRef]
- Chapkin, W.A.; Simone, D.L.; Frank, G.J.; Baur, J.W. Mechanical behavior and energy dissipation of infilled, composite Ti-6Al-4V trusses. Mater. Des. 2021, 203, 109602. [Google Scholar] [CrossRef]
- Bandyopadhyay, A.; Heer, B. Additive manufacturing of multi-material structures. Mater. Sci. Eng. R Rep. 2018, 129, 1–16. [Google Scholar] [CrossRef]
- Lumpe, T.S.; Mueller, J.; Shea, K. Tensile properties of multi-material interfaces in 3D printed parts. Mater. Des. 2019, 162, 1–9. [Google Scholar] [CrossRef]
- Cveticanin, L.; Zukovic, M. Negative effective mass in acoustic metamaterial with nonlinear mass-in-mass subsystems. Commun. Nonlinear Sci. Numer. Simul. 2017, 51, 89–104. [Google Scholar] [CrossRef]
- Cveticanin, L.; Zukovic, M.; Cveticanin, D. Influence of nonlinear subunits on the resonance frequency band gaps of acoustic metamaterial. Nonlinear Dyn. 2018, 93, 1341–1354. [Google Scholar] [CrossRef]
- Cveticanin, L.; Zukovic, M.; Cveticanin, D. On the elastic metamaterial with negative effective mass. J. Sound Vib. 2018, 436, 295–309. [Google Scholar] [CrossRef]
- Cveticanin, L.; Zukovic, M.; Ninkov, I.; Mester, G. Nonlinear lightweight metastructure with effective negative stiffness. Acta Mech. 2022, 233, 4311–4325. [Google Scholar] [CrossRef]
- Chan, Y.-C.; Shintani, K.; Chen, W. Robust topology optimization of multi-material lattice structures under material and load uncertainties. Front. Mech. Eng. 2019, 14, 141–152. [Google Scholar] [CrossRef]
- Stanković, T.; Mueller, J.; Egan, P.; Shea, K. A generalized optimality criteria method for optimization of additively manufactured multimaterial lattice structures. J. Mech. Des. 2015, 137, 111405. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, H. A review on auxetic structures and polymeric materials. Sci. Res. Essays 2010, 5, 1052–1063. [Google Scholar]
- Ren, X.; Das, R.; Tran, P.; Ngo, T.D.; Xie, Y.M. Auxetic metamaterials and structures: A review. Smart Mater. Struct. 2018, 27, 023001. [Google Scholar] [CrossRef]
- Meena, K.; Singamneni, S. A new auxetic structure with significantly reduced stress concentration effects. Mater. Des. 2019, 173, 107779. [Google Scholar] [CrossRef]
- Zhu, Y.; Luo, Y.; Gao, D.; Yu, C.; Ren, X.; Zhang, C. In-plane elastic properties of a novel re-entrant auxetic honeycomb with zigzag inclined ligaments. Eng. Struct. 2022, 268, 114788. [Google Scholar] [CrossRef]
- ISO 527-2:2012; Determination of Tensile Properties—Part 2: Test Conditions for Moulding and Extrusion Plastics. International Organization for Standardization: Geneva, Switzerland, 2012. Available online: https://dl2phipa8wx75.cloudfront.net/danalim/produktinformation/uk/512.pdf (accessed on 1 January 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.9 | 0.9 | 0.9 | 1.5 | 1.5 | 1.5 | 2.1 | 2.1 | 2.1 | |
| 30 | 35 | 40 | 30 | 35 | 40 | 30 | 35 | 40 | |
| Unfilled | 0930 | 0935 | 0940 | 1530 | 1535 | 1540 | 2130 | 2135 | 2140 |
| Filled | 0930SZ | 0935SZ | 0940SZ | 1530SZ | 1535SZ | 1540SZ | 2130SZ | 2135SZ | 2140SZ |
| Deformation Behavior—In Function of Geometrical Parameters and Fill Status | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| (mm) | 0.9 | 0.9 | 0.9 | 1.5 | 1.5 | 1.5 | 2.1 | 2.1 | 2.1 |
| (°) | 30 | 40 | 45 | 30 | 40 | 45 | 30 | 40 | 45 |
| Unfilled Specimens | |||||||||
| Deformation behavior | Buckling | Buckling | Buckling | Buckling | Cont. aux | Cont. aux | Cont. aux | Cont. aux | Cont. aux |
| Filled Specimens | |||||||||
| Deformation behavior | Buckling | Buckling | Buckling | Buckling | Buckling | Buckling | Buckling | Cont. aux | Cont. aux |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Széles, L.; Horváth, R.; Cveticanin, L. Research on Auxetic Lattice Structure for Impact Absorption in Machines and Mechanisms. Mathematics 2024, 12, 1983. https://doi.org/10.3390/math12131983
Széles L, Horváth R, Cveticanin L. Research on Auxetic Lattice Structure for Impact Absorption in Machines and Mechanisms. Mathematics. 2024; 12(13):1983. https://doi.org/10.3390/math12131983
Chicago/Turabian StyleSzéles, Levente, Richárd Horváth, and Livija Cveticanin. 2024. "Research on Auxetic Lattice Structure for Impact Absorption in Machines and Mechanisms" Mathematics 12, no. 13: 1983. https://doi.org/10.3390/math12131983
APA StyleSzéles, L., Horváth, R., & Cveticanin, L. (2024). Research on Auxetic Lattice Structure for Impact Absorption in Machines and Mechanisms. Mathematics, 12(13), 1983. https://doi.org/10.3390/math12131983