
Trajectory Optimization for Adaptive Deformed Wheels to Overcome Steps Using an Improved Hybrid Genetic Algorithm and an Adaptive Particle Swarm Optimization


Abstract
1. Introduction
- (1)
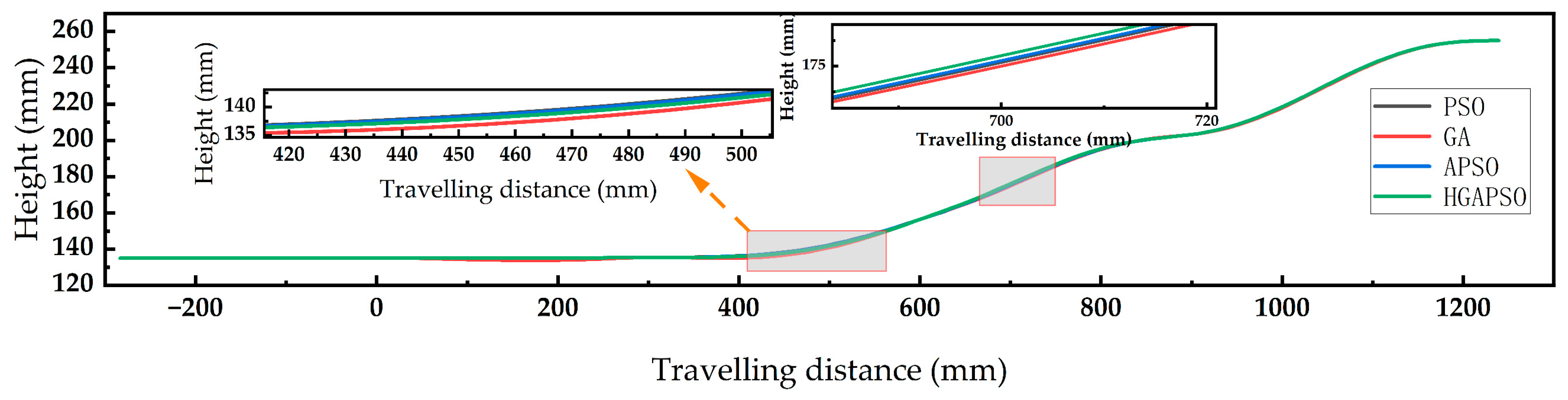
- The kinematics of the deformed wheel in the process for overcoming the step were analyzed, and a mathematical model was developed based on this kinematic analysis. The trajectory of the wheel’s center of mass was then generated based on this model using a fifth-order Bézier curve;
- (2)
- To avoid interference between the deformed wheel and the step or the ground, a mathematical model of the potential interference was established and used as a constraint. Additionally, an objective function was designed to improve the smoothness of the deformed wheel’s trajectory while overcoming the step;
- (3)
- To solve for the optimal trajectory, hybrid genetic and adaptive particle swarm optimization algorithms were improved. The enhanced HGAPSO algorithm was verified through simulations, demonstrating a significant improvement in the trajectory optimization compared to the GA, PSO, and APSO.
2. Related Work
3. Kinematic Analysis of Step Climbing with Morphing Wheels
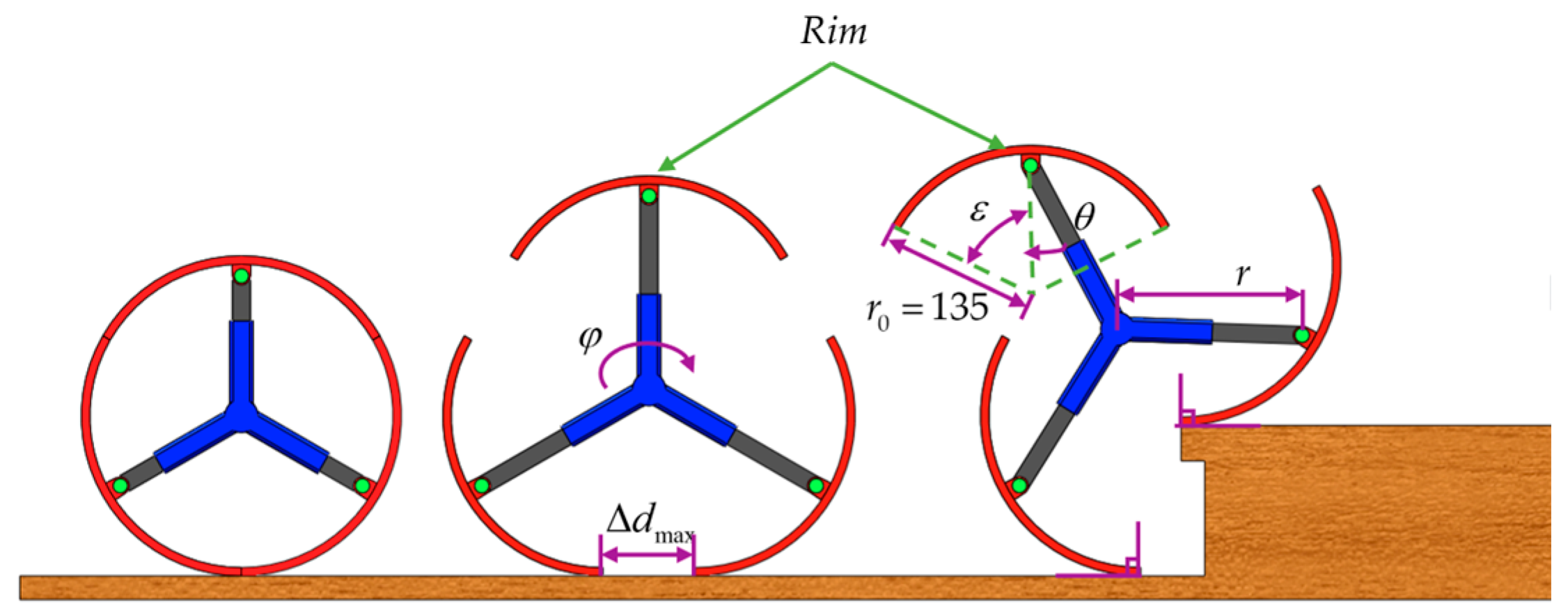
3.1. Morphology of Deformation Wheels Climbing Steps
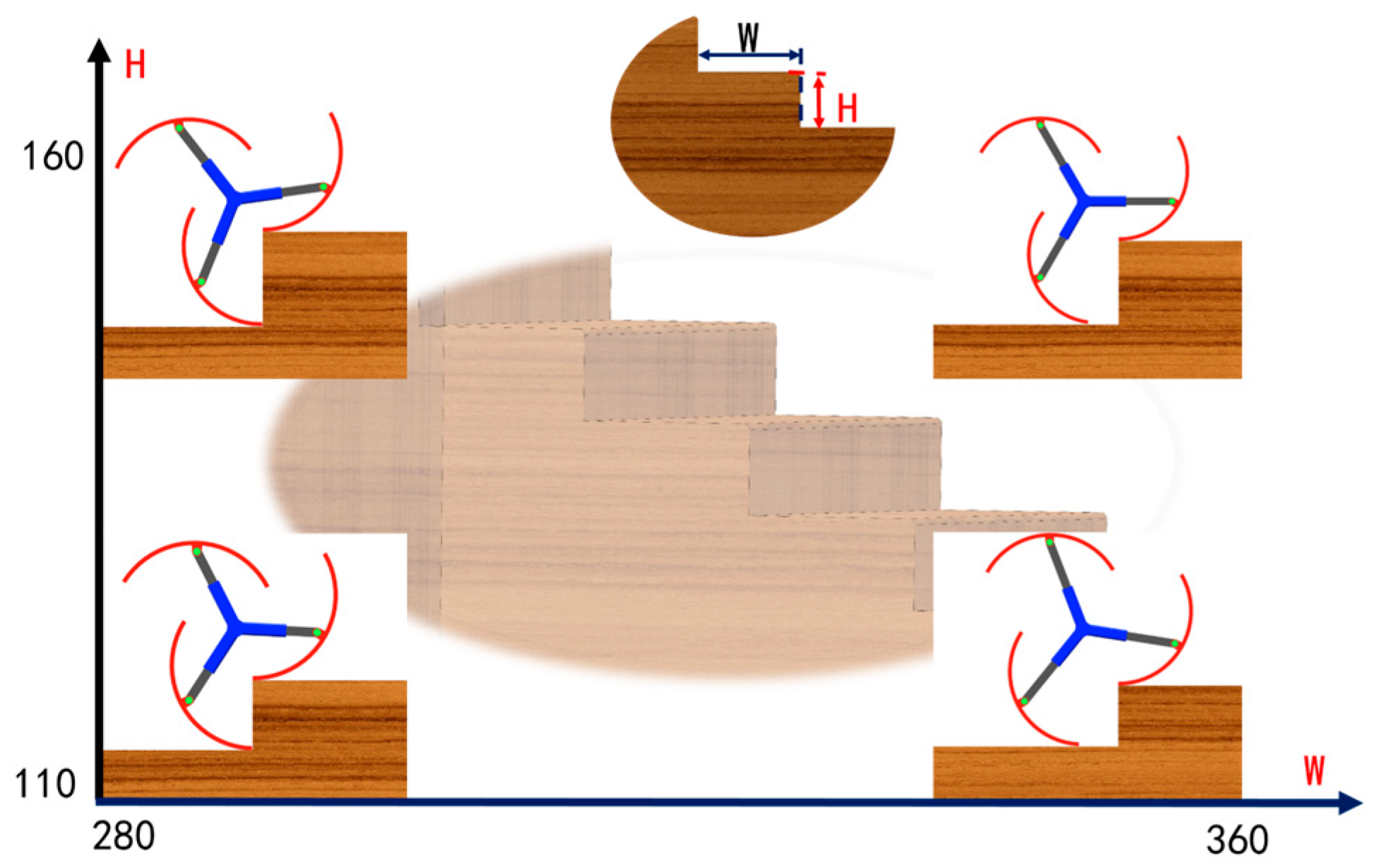
3.2. Analysis of Variation in Morphing Wheel in Relation to Step Size
3.3. Kinematic Analysis of Step Climbing
4. Path Generation
4.1. Path Generation Using Bézier Curves
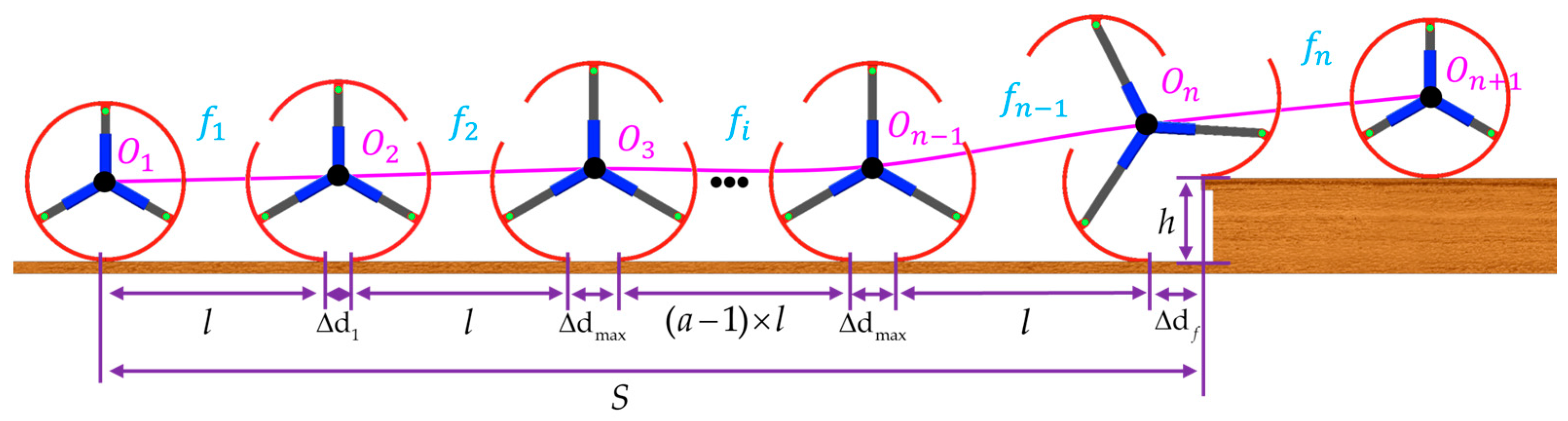
4.2. Path Planning
5. Trajectory Optimization
5.1. Interference Analysis of the Step-Climbing Process of Morphing Wheels
5.2. Objective Function
5.3. Adaptive Particle Swarm Optimization Algorithm
5.3.1. Methodology of APSO
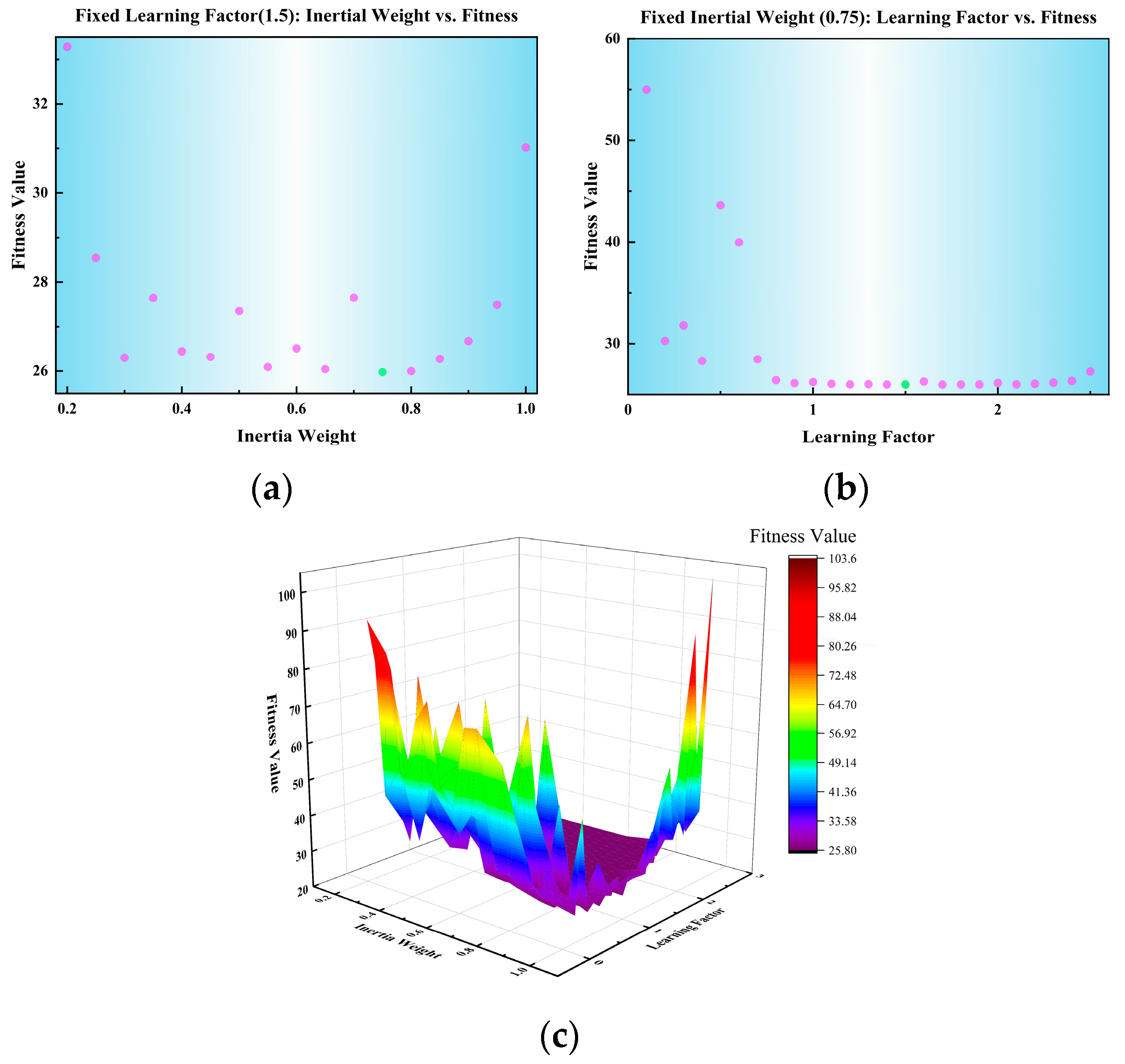
5.3.2. Sensitivity Analysis of PSO Parameters
- (a)
- Fixed Learning Factor: We varied the inertia weight while keeping the learning factor constant to observe its impact on the optimization performance;
- (b)
- Fixed Inertia Weight: We varied the learning factor while keeping the inertia weight constant to evaluate its effect on the optimization performance;
- (c)
- Combined Effect: We examined the combined influence of both learning factors and inertia weights on the optimization performance.
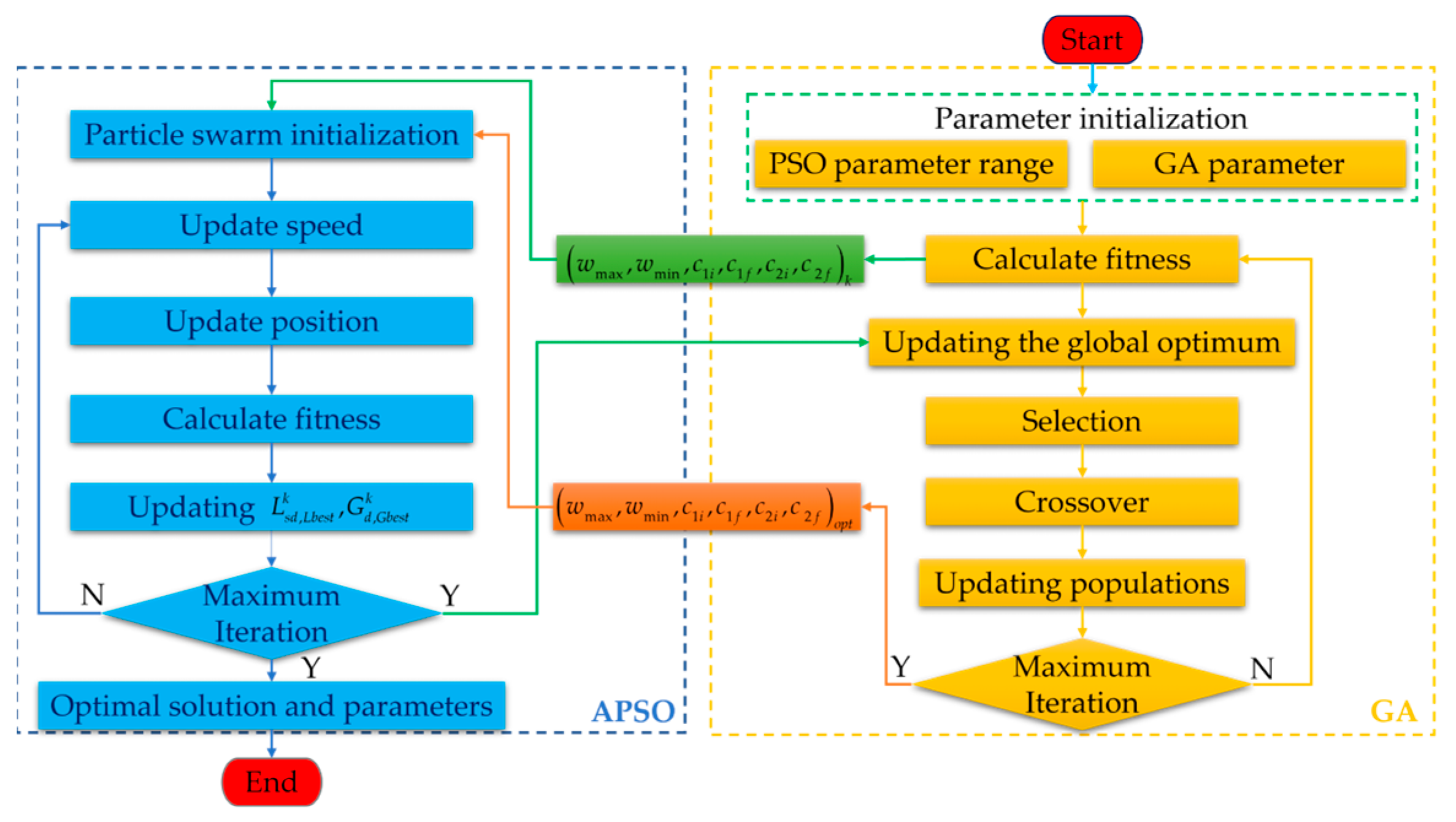
5.4. GA-Based APSO Parameter Optimization
5.4.1. Initializing Populations
5.4.2. Figuring out the Fitness
5.4.3. Population Selection
5.4.4. Population Crossover and Mutation
- Crossover Operation
- B.
- Mutation Operation
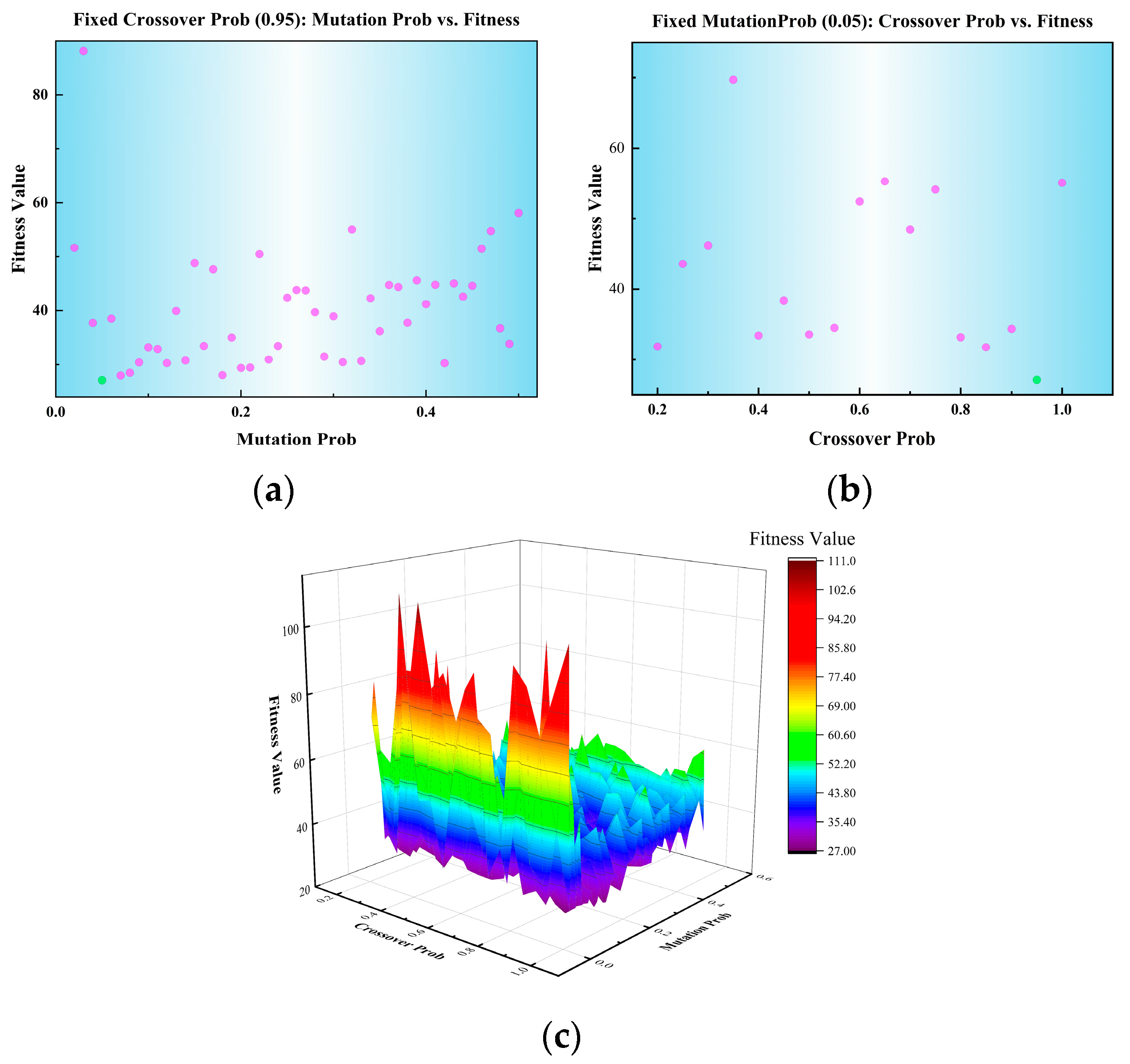
5.4.5. Sensitivity Analysis of GA Parameters
- (a)
- Fixed Crossover Probability: We varied the mutation probability while keeping the crossover probability constant to observe its impact on the optimization performance;
- (b)
- Fixed Mutation Probability: We varied the crossover probability while keeping the mutation probability constant to evaluate its effect on the optimization performance;
- (c)
- Combined Effect: We examined the combined influence of both the crossover and mutation probabilities on the optimization performance.
5.5. Hybrid-GAPSO-Optimized Motion Trajectories
| Algorithm 1 Hybrid GAPSO (HGAPSO) Algorithm |
| Require: 1: PSO parameter optimization bounds: , number of variables ,. 2: 3: PSO parameter optimization bounds: 4: , 5: population size , number of iterations , crossover probability , mutation probability , 6: for gen = 1 to 7: 8: 9: 10: 11: 12: end for 13: 14: 15: ( 16: return 17: end function 18: Perform the APSO optimization of the objective function based on the APSO optimal parameters obtained from the GA optimization 19: function ( 20: 21: particle number , number of iterations 22: 23: if then 24: Update the global optimal position: 25: end if 26: if then 27: Update the global optimal objective function: 28: end if 29: return 30: end function |
6. Algorithm Evaluation
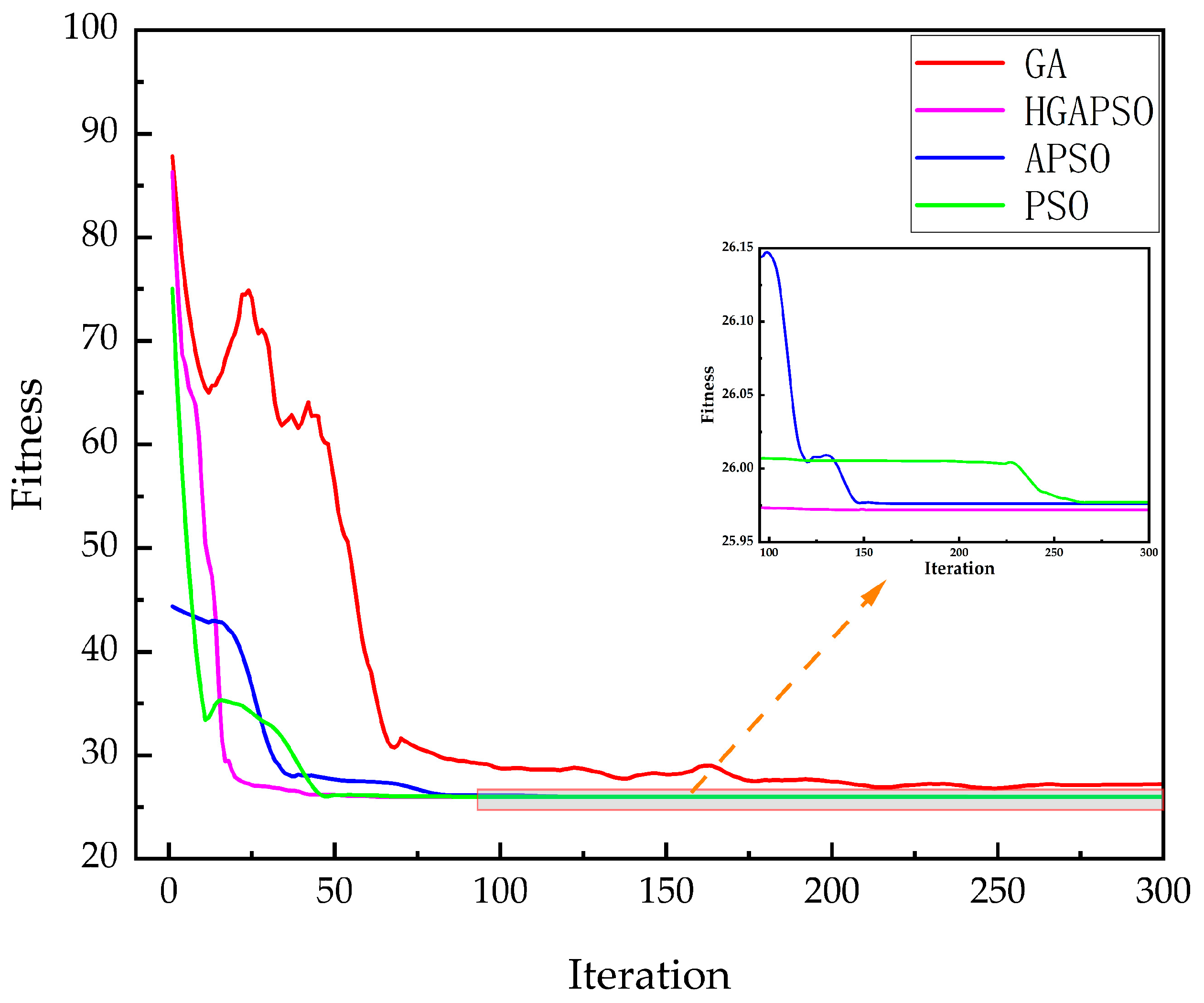
6.1. Validation of Algorithmic Strategy
6.2. Algorithm Validation under Real Working Conditions
- (a)
- Optimal fitness value
- (b)
- Mean value
- (c)
- Stability (difference)
7. Experiments and Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Botta, A.; Cavallone, P.; Baglieri, L.; Colucci, G.; Tagliavini, L.; Quaglia, G. A Review of Robots, Perception, and Tasks in Precision Agriculture. Appl. Mech. 2022, 3, 49. [Google Scholar] [CrossRef]
- Huang, B.; Xie, J.; Yan, J. Inspection Robot Navigation Based on Improved TD3 Algorithm. Sensors 2024, 24, 2525. [Google Scholar] [CrossRef] [PubMed]
- Pappalettera, A.; Reina, G.; Mantriota, G. Design and Analysis of Tracked Stair-Climbing Robot Using Innovative Suspension System. Robotics 2024, 13, 45. [Google Scholar] [CrossRef]
- Eich, M.; Grimminger, F.; Kirchner, F. A versatile stair-climbing robot for search and rescue applications. In Proceedings of the 2008 IEEE International Workshop on Safety, Security and Rescue Robotics, Sendai, Japan, 21–24 October 2008; pp. 35–40. [Google Scholar]
- Pandey, A. Mobile Robot Navigation and Obstacle Avoidance Techniques: A Review. Int. Robot. Autom. J. 2017, 2, 00022. [Google Scholar] [CrossRef]
- Hong, H.; Kim, D.; Kim, H.S.; Lee, S.; Kim, J. Contact angle estimation and composite locomotive strategy of a stair-climbing mobile platform. Robot. Comput. Integr. Manuf. 2013, 29, 367–381. [Google Scholar] [CrossRef]
- Kim, D.; Hong, H.; Kim, H.S.; Kim, J. Optimal design and kinetic analysis of a stair-climbing mobile robot with rocker-bogie mechanism. Mech. Mach. Theory 2012, 50, 90–108. [Google Scholar] [CrossRef]
- Mostyn, V.; Krys, V.; Kot, T.; Bobovsky, Z.; Novak, P. The synthesis of a segmented stair-climbing wheel. Int. J. Adv. Robot. Syst. 2018, 15, 1729881417749470. [Google Scholar] [CrossRef]
- Takaki, T.; Aoyama, T.; Ishii, I. Development of inverted pendulum robot capable of climbing stairs using planetary wheel mechanism. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5618–5624. [Google Scholar]
- Nguyen, T.; Ly, D.-K.; Huynh, T.Q.; Nguyen, T.T. Soft computing for determining base resistance of super-long piles in soft soil: A coupled SPBO-XGBoost approach. Comput. Geotech. 2023, 162, 105707. [Google Scholar] [CrossRef]
- Nguyen, T.; Ly, D.-K.; Shiau, J.; Nguyen-Dinh, P. Optimizing load-displacement prediction for bored piles with the 3mSOS algorithm and neural networks. Ocean Eng. 2024, 304, 117758. [Google Scholar] [CrossRef]
- Van Tran, M.; Ly, D.-K.; Nguyen, T.; Tran, N. Robust prediction of workability properties for 3D printing with steel slag aggregate using bayesian regularization and evolution algorithm. Constr. Build. Mater. 2024, 431, 136470. [Google Scholar] [CrossRef]
- Ryu, S.; Lee, Y.; Seo, T. Shape-Morphing Wheel Design and Analysis for Step Climbing in High Speed Locomotion. IEEE Robot. Autom. Lett. 2020, 5, 1977–1982. [Google Scholar] [CrossRef]
- Kim, Y.S.; Jung, G.P.; Kim, H.; Cho, K.J.; Chu, C.N. Wheel transformer: A miniaturized terrain adaptive robot with passively transformed wheels. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5625–5630. [Google Scholar]
- Kim, Y.-S.; Jung, G.-P.; Kim, H.; Cho, K.-J.; Chu, C.-N. Wheel Transformer: A Wheel-Leg Hybrid Robot With Passive Transformable Wheels. IEEE Trans. Robot. 2014, 30, 1487–1498. [Google Scholar] [CrossRef]
- Zheng, C.; Lee, K. WheeLeR: Wheel-Leg Reconfigurable Mechanism with Passive Gears for Mobile Robot Applications. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9292–9298. [Google Scholar]
- Chen, S.-C.; Huang, K.-J.; Chen, W.-H.; Shen, S.-Y.; Li, C.-H.; Lin, P.-C. Quattroped: A Leg--Wheel Transformable Robot. IEEE/ASME Trans. Mechatron. 2014, 19, 730–742. [Google Scholar] [CrossRef]
- Chen, W.-H.; Lin, H.-S.; Lin, Y.-M.; Lin, P.-C. TurboQuad: A Novel Leg–Wheel Transformable Robot With Smooth and Fast Behavioral Transitions. IEEE Trans. Robot. 2017, 33, 1025–1040. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, Y.; Lee, S.; Kim, J.; Kim, H.S.; Seo, T. STEP: A New Mobile Platform With 2-DOF Transformable Wheels for Service Robots. IEEE/ASME Trans. Mechatron. 2020, 25, 1859–1868. [Google Scholar] [CrossRef]
- Kim, K.; Kim, Y.; Kim, J.; Kim, H.S.; Seo, T. Optimal Trajectory Planning for 2-DOF Adaptive Transformable Wheel. IEEE Access 2020, 8, 14452–14459. [Google Scholar] [CrossRef]
- Bi, S.; Min, H.; Liu, Q.; Zheng, X. Multi-objective optimization for a humanoid robot climbing stairs based on Genetic Algorithms. In Proceedings of the 2009 International Conference on Information and Automation, Zhuhai, China, 22–24 June 2009; pp. 66–71. [Google Scholar]
- Yang, Y.; Liu, Y.; Zhang, Y.; Wang, S.; Bi, S.; Huang, J.; Zhang, J. Multi-parameter optimization for humanoid robot climbing stairs. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 2573–2578. [Google Scholar]
- Kim, E.; Kim, M.; Kim, J.-W. Optimal Trajectory Generation for Walking Up and Down a Staircase with a Biped Robot Using Genetic Algorithm (GA). In Advances in Robotics; Springer: Berlin/Heidelberg, Germany, 2009; pp. 103–111. [Google Scholar]
- Capi, G.; Nasu, Y.; Barolli, L.; Mitobe, K.; Takeda, K. Application of Genetic Algorithms for biped robot gait synthesis optimization during walking and going up-stairs. Adv. Robot. 2001, 15, 675–694. [Google Scholar] [CrossRef]
- Bo, L.; Zhang, Z.; Liu, Y.; Yang, S.; Wang, Y.; Wang, Y.; Zhang, X. Research on Path Planning Method of Solid Backfilling and Pushing Mechanism Based on Adaptive Genetic Particle Swarm Optimization. Mathematics 2024, 12, 479. [Google Scholar] [CrossRef]
- Xiaoyong, D.; Dongyang, Z. Trajectory optimization of interceptor missile based on hybrid genetic algorithm. In Proceedings of the 2021 2nd International Conference on Electronics, Communications and Information Technology (CECIT), Sanya, China, 27–29 December 2021; pp. 1257–1261. [Google Scholar]
- Yang, D.; Yang, S.; Han, M.; Liu, J. Multi-Target Trajectory Optimization of Dual-Arm Robot Based on NSGA-II Algorithm. In Proceedings of the 2023 7th International Conference on Electrical, Mechanical and Computer Engineering (ICEMCE), Xi’an, China, 20–22 October 2023; pp. 579–584. [Google Scholar]
- Yu, X.; Meng, W.; Liu, Z.; Ai, Q.; Liu, Q. Multi-objective Trajectory Optimization of Redundant Manipulator for Patient Assistance. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 66–71. [Google Scholar]
- Biswas, K.; Vasant, P.M.; Gamez Vintaned, J.A.; Watada, J. Cellular automata-based multi-objective hybrid grey wolf optimization and particle swarm optimization algorithm for wellbore trajectory optimization. J. Nat. Gas Sci. Eng. 2021, 85, 103695. [Google Scholar] [CrossRef]
- Han, S.; Shan, X.; Fu, J.; Xu, W.; Mi, H. Industrial robot trajectory planning based on improved pso algorithm. J. Phys. Conf. Ser. 2021, 1820, 012185. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Chai, S.; Xia, Y. Solving Constrained Trajectory Planning Problems Using Biased Particle Swarm Optimization. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1685–1701. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.-z.; Li, S.-h.; Zhang, L.-l.; Yao, X.-m. Time-optimal trajectory optimization of serial robotic manipulator with kinematic and dynamic limits based on improved particle swarm optimization. Int. J. Adv. Manuf. Technol. 2022, 120, 1253–1264. [Google Scholar] [CrossRef]
- Ramabalan, S.; Mahalakshmi, S.; Chinnadurai, M. Dynamically Changing Parameters Particle Swarm Optimization (DCPPSO) Based Trajectory Planning of 3-Links Articulated Robot. In Advances in Interdisciplinary Engineering: Select Proceedings of FLAME 2020; Springer: Singapore, 2021; pp. 337–344. [Google Scholar]
- Zhao, J.; Zhu, X.; Song, T. Serial Manipulator Time-Jerk Optimal Trajectory Planning Based on Hybrid IWOA-PSO Algorithm. IEEE Access 2022, 10, 6592–6604. [Google Scholar] [CrossRef]
- Wang, F.; Wu, Z.; Bao, T. Time-Jerk optimal Trajectory Planning of Industrial Robots Based on a Hybrid WOA-GA Algorithm. Processes 2022, 10, 1014. [Google Scholar] [CrossRef]
- Holland, J.H. An introductory analysis with applications to biology, control, and artificial intelligence. In Adaptation in Natural and Artificial Systems, 1st ed.; The University of Michigan: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Kao, Y.-T.; Zahara, E. A hybrid genetic algorithm and particle swarm optimization for multimodal functions. Appl. Soft Comput. 2008, 8, 849–857. [Google Scholar] [CrossRef]
- Robinson, J.; Sinton, S.; Rahmat-Samii, Y. Particle swarm, genetic algorithm, and their hybrids: Optimization of a profiled corrugated horn antenna. In Proceedings of the IEEE Antennas and Propagation Society International Symposium (IEEE Cat. No. 02CH37313), San Antonio, TX, USA, 16–21 June 2002; pp. 314–317. [Google Scholar]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Guimin, C.; Xinbo, H.; Jianyuan, J.; Zhengfeng, M. Natural Exponential Inertia Weight Strategy in Particle Swarm Optimization. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 3672–3675. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 1943, pp. 1945–1950. [Google Scholar]
- Ratnaweera, A.; Halgamuge, S.K.; Watson, H.C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients. IEEE Trans. Evol. Comput. 2004, 8, 240–255. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2022, 79, 7305–7336. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Indicator | WOA | GWO | COA | PSO | GA | APSO | APSO |
|---|---|---|---|---|---|---|---|---|
| Mean | 1.72 × 1006 | 7.20 × 1002 | 1.05 × 1000 | 1.53 × 1005 | 2.17 × 1007 | 2.97 × 1005 | 1.00 × 1000 | |
| F01 | Standard Deviation | 2.66 × 1006 | 1.06 × 1003 | 7.31 × 10−02 | 8.76 × 1004 | 1.40 × 1007 | 5.88 × 1005 | 0.00 × 1000 |
| Run Time | 1.50 × 10−01 | 1.70 × 10−01 | 2.93 × 10−01 | 1.56 × 10−01 | 1.78 × 10−01 | 2.59 × 10−01 | 1.56 × 10−01 | |
| Mean | 7.90 × 1003 | 2.68 × 1002 | 5.00 × 1000 | 3.65 × 1002 | 2.47 × 1003 | 6.13 × 1002 | 2.93 × 1002 | |
| F02 | Standard Deviation | 1.47 × 1003 | 1.07 × 1002 | 0.00 × 1000 | 1.30 × 1002 | 1.07 × 1003 | 4.42 × 1002 | 1.05 × 1002 |
| Run Time | 9.80 × 10−02 | 1.45 × 10−01 | 1.76 × 10−01 | 3.80 × 10−01 | 1.37 × 10−01 | 2.38 × 10−01 | 1.04 × 10−01 | |
| Mean | 4.07 × 1000 | 2.67 × 1000 | 5.38 × 1000 | 4.98 × 1000 | 1.21 × 1001 | 3.76 × 1000 | 1.44 × 1000 | |
| F03 | Standard Deviation | 2.14 × 1000 | 2.85 × 1000 | 1.57 × 1000 | 3.71 × 1000 | 3.09 × 10−01 | 2.14 × 1000 | 7.43 × 10−02 |
| Run Time | 8.76 × 10−02 | 1.45 × 10−01 | 1.56 × 10−01 | 2.56 × 10−01 | 1.20 × 10−01 | 1.64 × 10−01 | 9.37 × 10−02 | |
| Mean | 3.98 × 10 01 | 8.70 × 1000 | 7.50 × 1001 | 3.95 × 1001 | 1.29 × 1001 | 2.57 × 1001 | 8.28 × 1000 | |
| F04 | Standard Deviation | 1.12 × 1001 | 3.37 × 1000 | 8.14 × 1000 | 1.62 × 1001 | 2.08 × 1000 | 7.82 × 1000 | 1.57 × 1000 |
| Run Time | 9.61 × 10−02 | 1.30 × 10−01 | 2.08 × 10−01 | 1.33 × 10−01 | 1.36 × 10−01 | 1.12 × 10−01 | 1.01 × 10−01 | |
| Mean | 1.72 × 1000 | 1.51 × 1000 | 2.78 × 1001 | 1.28 × 1000 | 2.21 × 1000 | 1.24 × 1000 | 1.15 × 1000 | |
| F05 | Standard Deviation | 2.59 × 10−01 | 2.19 × 10−01 | 6.94 × 1000 | 2.20 × 10−01 | 8.34 × 10−02 | 5.99 × 10−02 | 6.50 × 10−02 |
| Run Time | 1.04 × 10−01 | 1.24 × 10−01 | 2.18 × 10−01 | 1.82 × 10−01 | 1.39 × 10−01 | 1.13 × 10−01 | 1.01 × 10−01 | |
| Mean | 9.35 × 1000 | 1.75 × 1000 | 8.33 × 1000 | 5.33 × 1000 | 4.63 × 1000 | 5.54 × 1000 | 1.00 × 1000 | |
| F06 | Standard Deviation | 1.65 × 1000 | 4.96 × 10−01 | 1.02 × 1000 | 1.84 × 1000 | 1.37 × 1000 | 1.17 × 1000 | 3.07 × 10−03 |
| Run Time | 1.39 × 1000 | 1.42 × 1000 | 3.47 × 1000 | 1.08 × 1000 | 1.44 × 1000 | 7.28 × 10−01 | 1.39 × 1000 | |
| Mean | 1.02 × 1003 | 6.34 × 1002 | 1.73 × 1003 | 1.23 × 1003 | 6.72 × 1002 | 9.62 × 1002 | 3.99 × 1002 | |
| F07 | Standard Deviation | 4.22 × 1002 | 1.42 × 1002 | 1.62 × 1002 | 1.89 × 1002 | 7.19 × 1002 | 3.04 × 1002 | 1.28 × 1002 |
| Run Time | 1.10 × 10−01 | 1.34 × 10−01 | 2.43 × 10−01 | 2.12 × 10−01 | 1.45 × 10−01 | 1.55 × 10−01 | 1.16 × 10−01 | |
| Mean | 4.69 × 1000 | 3.83 × 1000 | 4.81 × 1000 | 4.20 × 1000 | 5.31 × 1000 | 3.98 × 1000 | 3.61 × 1000 | |
| F08 | Standard Deviation | 3.41 × 10−01 | 5.99 × 10−01 | 1.34 × 10−01 | 2.76 × 10−01 | 3.05 × 10−01 | 1.50 × 10−01 | 2.45 × 10−01 |
| Run Time | 9.70 × 10−02 | 1.26 × 10−01 | 2.19 × 10−01 | 1.62 × 10−01 | 1.32 × 10−01 | 2.07 × 10−01 | 1.02 × 10−01 | |
| Mean | 1.36 × 1000 | 1.11 × 1000 | 2.58 × 1000 | 1.25 × 1000 | 1.78 × 1000 | 1.19 × 1000 | 1.13 × 1000 | |
| F09 | Standard Deviation | 1.34 × 10−01 | 9.14 × 10−02 | 3.46 × 10−02 | 3.55 × 10−02 | 1.38 × 10−01 | 9.97 × 10−02 | 4.98 × 10−02 |
| Run Time | 7.89 × 10−02 | 1.06 × 10−01 | 1.75 × 10−01 | 2.13 × 10−01 | 1.21 × 10−01 | 1.28 × 10−01 | 8.40 × 10−02 | |
| Mean | 2.12 × 1001 | 2.15 × 1001 | 2.13 × 1001 | 2.13 × 1001 | 2.19 × 1001 | 2.11 × 1001 | 2.10 × 1001 | |
| F10 | Standard Deviation | 1.07 × 10−01 | 5.09 × 10−02 | 5.97 × 10−02 | 5.77 × 10−02 | 1.32 × 10−01 | 2.15 × 10−01 | 9.64 × 10−02 |
| Run Time | 9.99 × 10−02 | 1.23 × 10−01 | 2.20 × 10−01 | 2.25 × 10−01 | 1.43 × 10−01 | 1.99 × 10−01 | 1.08 × 10−01 |
| Algorithm | Parameters |
|---|---|
| APSO | |
| PSO | |
| GA |
| Algorithm | Maximum | Minimum | Difference | Mean |
|---|---|---|---|---|
| HGAPSO | 25.977459 | 25.971859 | 0.005600 | 25.973664 |
| APSO | 26.023795 | 25.976283 | 0.047512 | 25.997265 |
| PSO | 26.487960 | 25.977160 | 0.510800 | 26.132570 |
| GA | 29.600436 | 26.798801 | 2.801635 | 28.070189 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wei, Y.; Wang, C.; Wu, H. Trajectory Optimization for Adaptive Deformed Wheels to Overcome Steps Using an Improved Hybrid Genetic Algorithm and an Adaptive Particle Swarm Optimization. Mathematics 2024, 12, 2077. https://doi.org/10.3390/math12132077
Liu Y, Wei Y, Wang C, Wu H. Trajectory Optimization for Adaptive Deformed Wheels to Overcome Steps Using an Improved Hybrid Genetic Algorithm and an Adaptive Particle Swarm Optimization. Mathematics. 2024; 12(13):2077. https://doi.org/10.3390/math12132077
Chicago/Turabian StyleLiu, Yanjie, Yanlong Wei, Chao Wang, and Heng Wu. 2024. "Trajectory Optimization for Adaptive Deformed Wheels to Overcome Steps Using an Improved Hybrid Genetic Algorithm and an Adaptive Particle Swarm Optimization" Mathematics 12, no. 13: 2077. https://doi.org/10.3390/math12132077
APA StyleLiu, Y., Wei, Y., Wang, C., & Wu, H. (2024). Trajectory Optimization for Adaptive Deformed Wheels to Overcome Steps Using an Improved Hybrid Genetic Algorithm and an Adaptive Particle Swarm Optimization. Mathematics, 12(13), 2077. https://doi.org/10.3390/math12132077