
Linearly Implicit Conservative Schemes with a High Order for Solving a Class of Nonlocal Wave Equations

Abstract
:1. Introduction
2. Equivalent System with ESAV Approach
3. Semi-Discrete Fourier Pseudo-Spectral Conservative System
3.1. Fourier Pseudo-Spectral Method for the Nonlocal Operator
3.2. Semi-Discrete Conservative System
4. Linearly Implicit Energy-Preserving Schemes
4.1. Symplectic RK Methods
4.2. Construction of the Fully Implicit Schemes
- It is difficult to obtain the convergence analysis results for high-dimensional problems.
- The introduction of a new variable and extrapolation technology into the numerical schemes increases the complexity of the system, making it more challenging to prove the convergence of the proposed schemes.
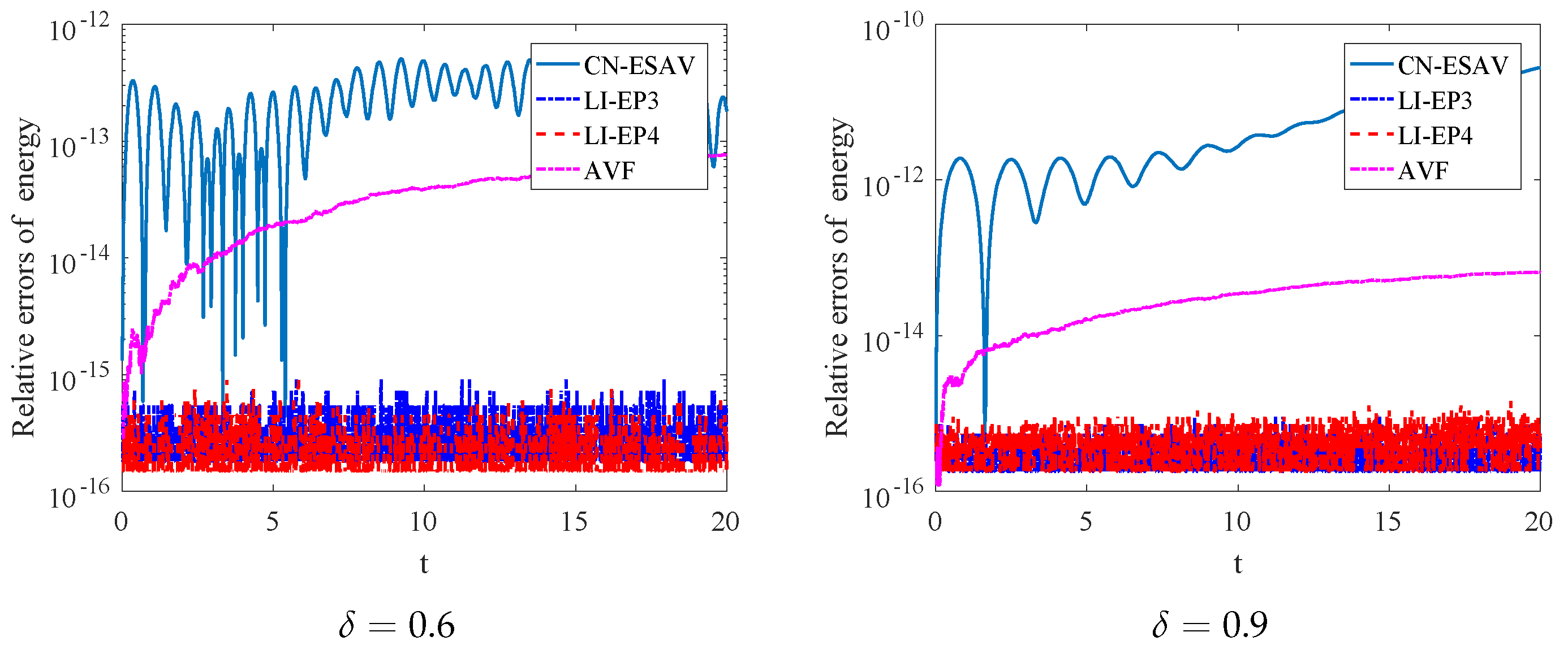
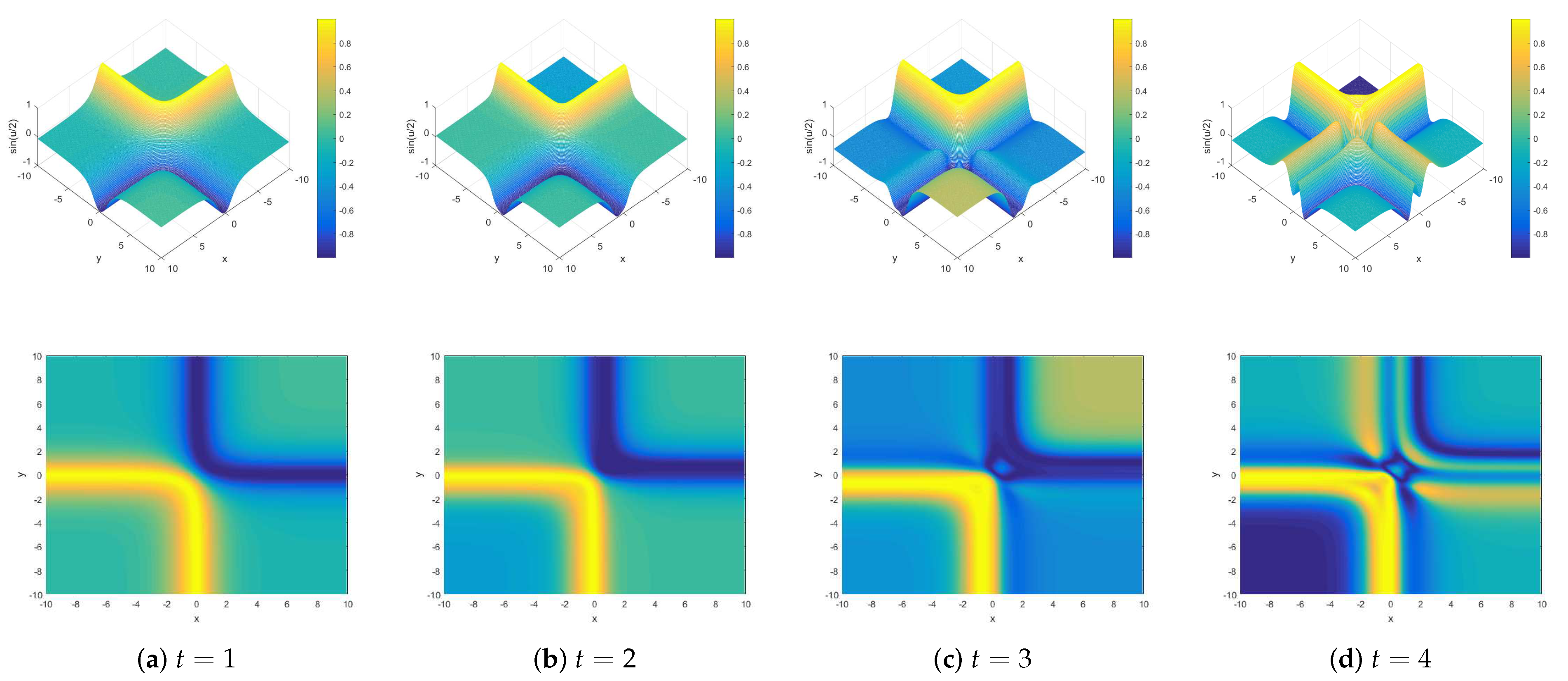
5. Numerical Experiments
- CN-ESAV: A second-order energy-preserving scheme for the nonlocal wave equation based on the ESAV method.
- AVF: A second-order energy-preserving scheme for the nonlocal wave equation based on the averaged vector field (AVF) method [15].
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Yang, Z.; Zhang, J. Stability and convergence analysis of high-order numerical schemes with DtN-type absorbing boundary conditions for nonlocal wave equations. IMA J. Numer. Anal. 2023, 44, 1–29. [Google Scholar] [CrossRef]
- Du, Q.; Ju, L.; Li, X.; Qiao, Z. Stabilized linear semi-implicit schemes for the nonlocal Cahn–Hilliard equation. J. Comput. Phys. 2018, 363, 39–54. [Google Scholar] [CrossRef]
- Du, Q. Nonlocal Modeling, Analysis, and Computation; SIAM: Philadelphia, PA, USA, 2019. [Google Scholar]
- Macías-Díaz, J. A structure-preserving method for a class of nonlinear dissipative wave equations with Riesz space-fractional derivatives. J. Comput. Phys. 2017, 351, 40–58. [Google Scholar] [CrossRef]
- Bates, P.; Brown, S.; Han, J. Numerical analysis for a nonlocal Allen-Cahn equation. Int. J. Numer. Anal. Model. 2009, 6, 33–49. [Google Scholar]
- Wang, J.; Zhang, J.; Zheng, C. Stability and error analysis for a second-order approximation of 1D nonlocal Schrödinger equation under DtN-typ boundary conditions. Math. Comp. 2023, 334, 761–783. [Google Scholar]
- Zhao, X.; Sun, Z.; Hao, Z. A fourth-order compact ADI scheme for two-dimensional nonlinear space fractional Schrödinger equation. SIAM. J. Comput. 2014, 36, A2865–A2886. [Google Scholar] [CrossRef]
- Wang, D.; Xiao, A.; Yang, W. Crank–Nicolson difference scheme for the coupled nonlinear Schrödinger equations with the Riesz space fractional derivative. J. Comput. Phys. 2013, 242, 670–681. [Google Scholar] [CrossRef]
- Wang, D.; Xiao, A.; Yang, W. A linearly implicit conservative difference scheme for the space fractional coupled nonlinear Schrödinger equations. J. Comput. Phys. 2014, 272, 644–655. [Google Scholar] [CrossRef]
- Wang, D.; Xiao, A.; Yang, W. Maximum-norm error analysis of a difference scheme for the space fractional CNLS. Appl. Math. Comput. 2015, 257, 241–251. [Google Scholar] [CrossRef]
- Macías-Díaz, J. A numerically efficient dissipation-preserving implicit method for a nonlinear multidimensional fractional wave equation. J. Sci. Comput. 2018, 77, 1–26. [Google Scholar] [CrossRef]
- Macías-Díaz, J.; Hendy, A.; Staelen, R. A compact fourth-order in space energy-preserving method for Riesz space-fractional nonlinear wave equations. Appl. Math. Comput. 2018, 325, 1–14. [Google Scholar] [CrossRef]
- Wang, N.; Li, M.; Huang, C. Unconditional energy dissipation and error estimates of the SAV Fourier spectral method for nonlinear fractional generalized wave equation. J. Sci. Comput. 2021, 88, 19. [Google Scholar] [CrossRef]
- Li, M.; Fei, M.; Wang, N.; Huang, C. A dissipation-preserving finite element method for nonlinear fractional wave equations on irregular convex domains. Math. Comput. Simul. 2020, 177, 404–419. [Google Scholar] [CrossRef]
- Cai, W.; Li, H.; Wang, Y. Partitioned averaged vector field methods. J. Comput. Phys. 2018, 370, 25–42. [Google Scholar] [CrossRef]
- Hu, D.; Cai, W.; Song, Y.; Wang, Y. A fourth-order dissipation-preserving algorithm with fast implementation for space fractional nonlinear damped wave equations. Commun. Nonlinear Sci. Numer. Simul. 2020, 91, 105432. [Google Scholar] [CrossRef]
- Li, D.; Li, X.; Zhang, Z. Implicit-explicit relaxation Runge-Kutta methods: Construction, analysis and applications to PDEs. Math. Comp. 2023, 339, 92. [Google Scholar] [CrossRef]
- Brugnano, L.; Zhang, C.; Li, D. A class of energy-conserving Hamiltonian boundary value methods for nonlinear Schrödinger equation with wave operator. Commun. Nonlinear Sci. Numer. Simul. 2018, 60, 33–49. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y.; Qin, M. A sixth order averaged vector field method. J. Comput. Math. 2016, 34, 479–498. [Google Scholar] [CrossRef]
- Shen, J.; Xu, J. Convergence and error analysis for the scalar auxiliary variable (SAV) schemes to gradient flows. SIAM J. Numer. Anal. 2018, 56, 2895–2912. [Google Scholar] [CrossRef]
- Shen, J.; Xu, J.; Yang, J. The scalar auxiliary variable (SAV) approach for gradient flows. J. Comput. Phys. 2018, 353, 407–416. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X. The exponential scalar auxiliary variable (E-SAV) approach for phase field models and its explicit computing. SIAM J. Sci. Comput. 2020, 42, B630–B655. [Google Scholar] [CrossRef]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations; Springer Science: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Hu, D.; Kong, L.; Cai, W.; Wang, Y. Fully decoupled, linear and energy-preserving gsav difference schemes for the nonlocal coupled sine-Gordon equations in multiple dimensions. Numer. Algorithms 2023, 95, 1953–1980. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, J.; Wang, Q. Arbitrarily high–order linear energy stable schemes for gradient flow models. J. Comput. Phys. 2020, 419, 109610. [Google Scholar] [CrossRef]
- Li, D.; Sun, W. Linearly implicit and high-order energy-conserving schemes for nonlinear wave equations. J. Sci. Comput. 2020, 83, A3703–A3727. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CN-ESAV Scheme | LI-EP3 Scheme | LI-EP4 Scheme | AVF Scheme | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Rate | Rate | Rate | Rate | ||||||
| 0.6 | 0.01 | 2.0728 × 10−4 | - | 2.3599 × 10−6 | - | 3.2338 × 10−7 | - | 2.8415 × 10−4 | - |
| 0.005 | 5.3003 × 10−5 | 1.9674 | 3.6653 × 10−7 | 2.6867 | 2.4979 × 10−8 | 3.6944 | 7.2857 × 10−5 | 1.9635 | |
| 0.0025 | 1.3402 × 10−5 | 1.9835 | 5.0776 × 10−8 | 2.8517 | 1.7166 × 10−9 | 3.8631 | 1.8402 × 10−5 | 1.9852 | |
| 0.9 | 0.01 | 1.1184 × 10−5 | - | 7.6434 × 10−8 | - | 7.8159 × 10−9 | - | 8.9307 × 10−4 | - |
| 0.005 | 2.9750 × 10−6 | 1.9105 | 1.1263 × 10−8 | 2.7626 | 5.7071 × 10−10 | 3.7756 | 2.3058 × 10−4 | 1.9535 | |
| 0.0025 | 7.6704 × 10−7 | 1.9555 | 1.5240 × 10−9 | 2.8857 | 3.8410 × 10−11 | 3.8932 | 5.8709 × 10−5 | 1.9736 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Fu, Y. Linearly Implicit Conservative Schemes with a High Order for Solving a Class of Nonlocal Wave Equations. Mathematics 2024, 12, 2408. https://doi.org/10.3390/math12152408
Chen S, Fu Y. Linearly Implicit Conservative Schemes with a High Order for Solving a Class of Nonlocal Wave Equations. Mathematics. 2024; 12(15):2408. https://doi.org/10.3390/math12152408
Chicago/Turabian StyleChen, Shaojun, and Yayun Fu. 2024. "Linearly Implicit Conservative Schemes with a High Order for Solving a Class of Nonlocal Wave Equations" Mathematics 12, no. 15: 2408. https://doi.org/10.3390/math12152408