
A Fixed-Time Event-Triggered Consensus of a Class of Multi-Agent Systems with Disturbed and Non-Linear Dynamics


Abstract
:1. Introduction
2. Preparation and Problem Description
- A.
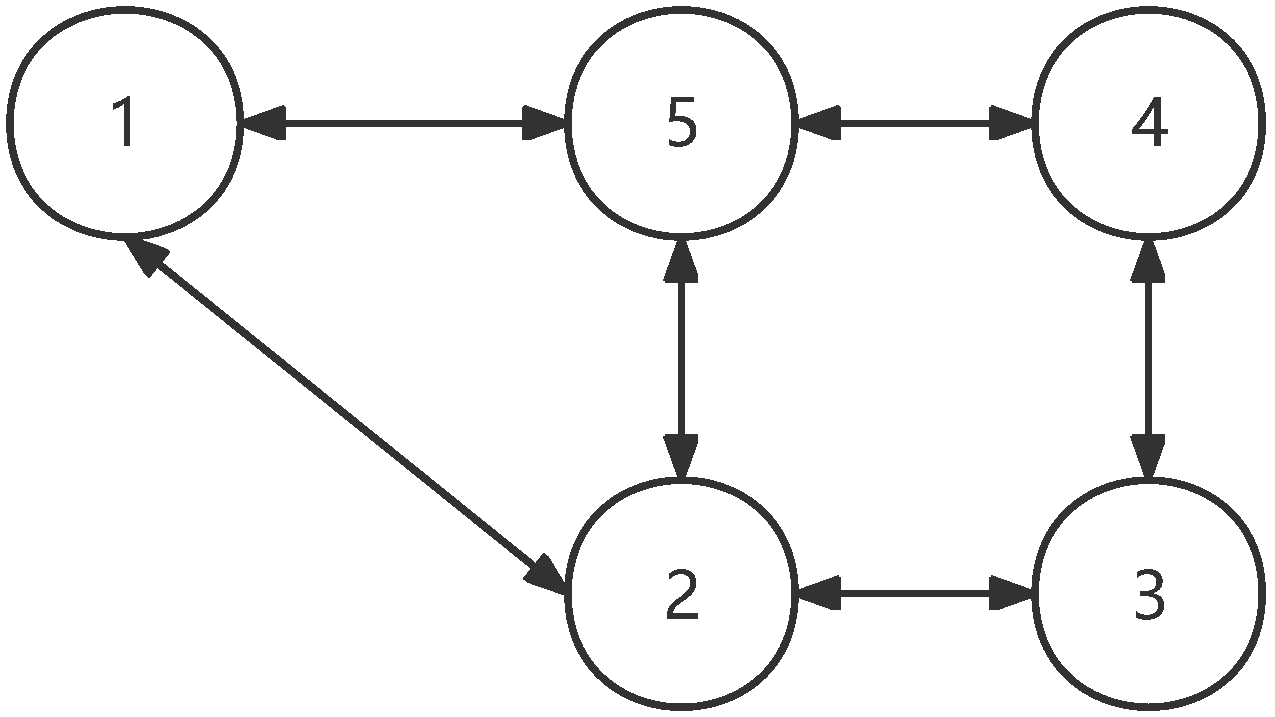
- the basic graph theory
- B.
- Some lemmas
- (1)
- 0 is an eigenvalue of the matrix and the corresponding eigenvector is , .
- (2)
- The Laplace matrix is positive semidefinite, and all the eigenvalues of the matrix satisfy the following relation:
- (3)
- For any , .
- C.
- the problem formulation
- For example, a disturbances function , then for the state of agent , as well as .
3. Fixed-Time Event-Triggered Consensus Protocol
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhi, H.; Chen, L.; Li, C.; Guo, Y. Leader–Follower Affine Formation Control of Second-Order Nonlinear Uncertain Multi-Agent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3547–3551. [Google Scholar] [CrossRef]
- Yu, J.; Dong, X.; Li, Q.; Lü, J.; Ren, Z. Adaptive Practical Optimal Time-Varying Formation Tracking Control for Disturbed High-Order Multi-Agent Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 2567–2578. [Google Scholar] [CrossRef]
- Qin, J.; Ma, Q.; Yi, P.; Wang, L. Multi-Agent Interval Consensus with Flocking Dynamics. IEEE Trans. Autom. Control 2021, 6, 3965–3980. [Google Scholar]
- Yazdani, S.; Su, H. A Fully Distributed Protocol for Flocking of Time-Varying Linear Systems With Dynamic Leader and External Disturbance. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1234–1242. [Google Scholar] [CrossRef]
- Wang, L.; Xiao, F. Finite-time consensus problems for networks of dynamic agents. IEEE Trans. Autom. Control 2010, 55, 950–955. [Google Scholar] [CrossRef]
- Zhou, J.; Wang, Q. Convergence speed in distributed consensus over dynamically switching random networks. Automatica 2009, 45, 1455–1461. [Google Scholar] [CrossRef]
- Wang, Q.; Dong, X.; Yu, J.; Lu, J.; Ren, Z. Predefined Finite-Time Output Containment of Nonlinear Multi-Agent Systems With Leaders of Unknown Inputs. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3436–3448. [Google Scholar] [CrossRef]
- Bu, X.; Zhu, P.; Hou, Z.; Liang, J. Finite-Time Consensus for Linear Multi-Agent Systems Using Data-Driven Terminal ILC. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2029–2033. [Google Scholar] [CrossRef]
- Luo, Y.; Zhu, W.; Cao, J.; Rutkowski, L. Event-Triggered Finite-Time Guaranteed Cost H-Infinity Consensus for Nonlinear Uncertain Multi-Agent Systems. IEEE Trans. Netw. Sci. Eng. 2022, 3, 1527–1539. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of Linear Control Systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Parsegov, S.E.; Polyakov, A.E.; Scherbakov, P.S. Fixed-time consensus algorithm for multi-agent systems with integrator dynamics. IFAC Proc. 2013, 27, 110–115. [Google Scholar] [CrossRef]
- Polyakov, A.; Efifimov, D.; Perruquetti, W. Finite-time and fixed-time stabilization: Implicit Lyapunov function approach. Automatica 2015, 6, 332–340. [Google Scholar] [CrossRef]
- Hong, H.; Yu, W.; Wen, G.; Yu, X. Distributed Robust Fixed-Time Consensus for Nonlinear and Disturbed Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1464–1473. [Google Scholar] [CrossRef]
- Zou, W.; Qian, K.; Xiang, Z. Fixed-Time Consensus for a Class of Heterogeneous Nonlinear Multiagent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 1279–12838. [Google Scholar] [CrossRef]
- You, X.; Hua, C.-C.; Li, K.; Jia, X. Fixed-Time Leader-Following Consensus for High-Order Time-Varying Nonlinear Multiagent Systems. IEEE Trans. Autom. Control 2020, 65, 5510–5516. [Google Scholar] [CrossRef]
- Li, D.; Ge, S.S.; Lee, T.H. Fixed-Time-Synchronized Consensus Control of Multiagent Systems. IEEE Trans. Control Netw. Syst. 2021, 8, 89–98. [Google Scholar] [CrossRef]
- Ni, J.; Tang, Y.; Shi, P. A New Fixed-Time Consensus Tracking Approach for Second-Order Multiagent Systems Under Directed Communication Topology. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2488–2500. [Google Scholar] [CrossRef]
- Ni, J.; Shi, P. Adaptive Neural Network Fixed-Time Leader–Follower Consensus for Multiagent Systems with Constraints and Disturbances. IEEE Trans. Cybern. 2021, 51, 1835–1848. [Google Scholar] [CrossRef]
- Wang, L.; Liu, X.; Cao, J.; Hu, X. Fixed-Time Containment Control for Nonlinear Multi-Agent Systems with External Disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 459–463. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Yu, Y.; Sun, C. Fixed-Time Event-Triggered Consensus for Nonlinear Multiagent Systems without Continuous Communications. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2221–2229. [Google Scholar] [CrossRef]
- Liu, J.; Yu, Y.; Xu, Y.; Zhang, Y.; Sun, C. Fixed-Time Average Consensus of Nonlinear Delayed MASs Under Switching Topologies: An Event-Based Triggering Approach. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2721–2733. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, S.; Zheng, Y. Cooperative Output Regulation for Linear Multiagent Systems via Distributed Fixed-Time Event-Triggered Control. IEEE Trans. Neural Netw. Learn. Syst. 2022, 19, 338–347. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.; Shi, Y.; Tang, Y.; Werner, H.; Kurths, J. Event-triggered Fixed-time Attitude Consensus with Fixed and Switching Topologies. IEEE Trans. Autom. Control 2021, 67, 4138–4145. [Google Scholar] [CrossRef]
- Liu, J.; Yu, Y.; Wang, Q.; Sun, C. Fixed-time event-triggered consensus control for multi-agent systems with nonlinear uncertainties. Neurocomputing 2017, 260, 497–504. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theoretical Convergence Time | Simulation Convergence Time | |
|---|---|---|
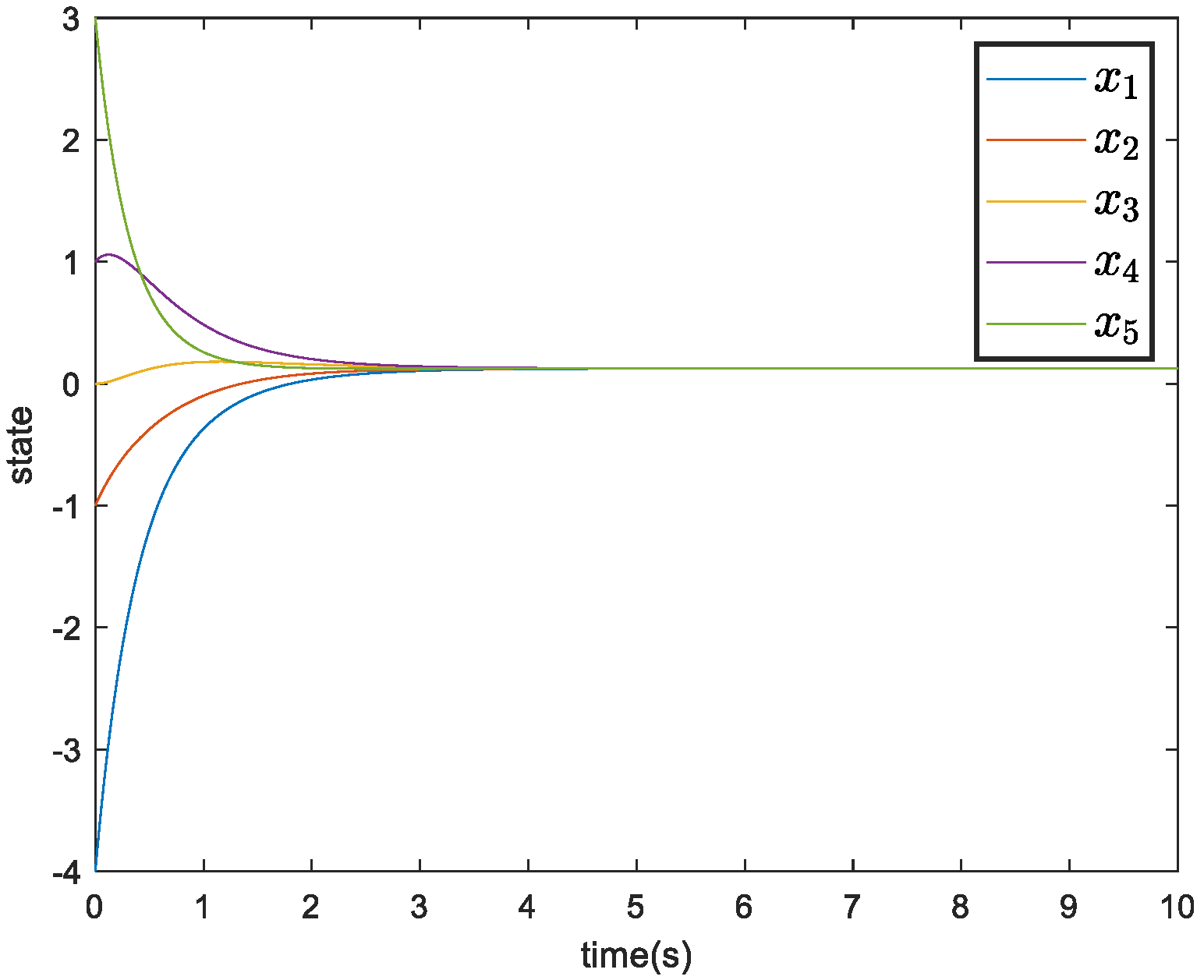
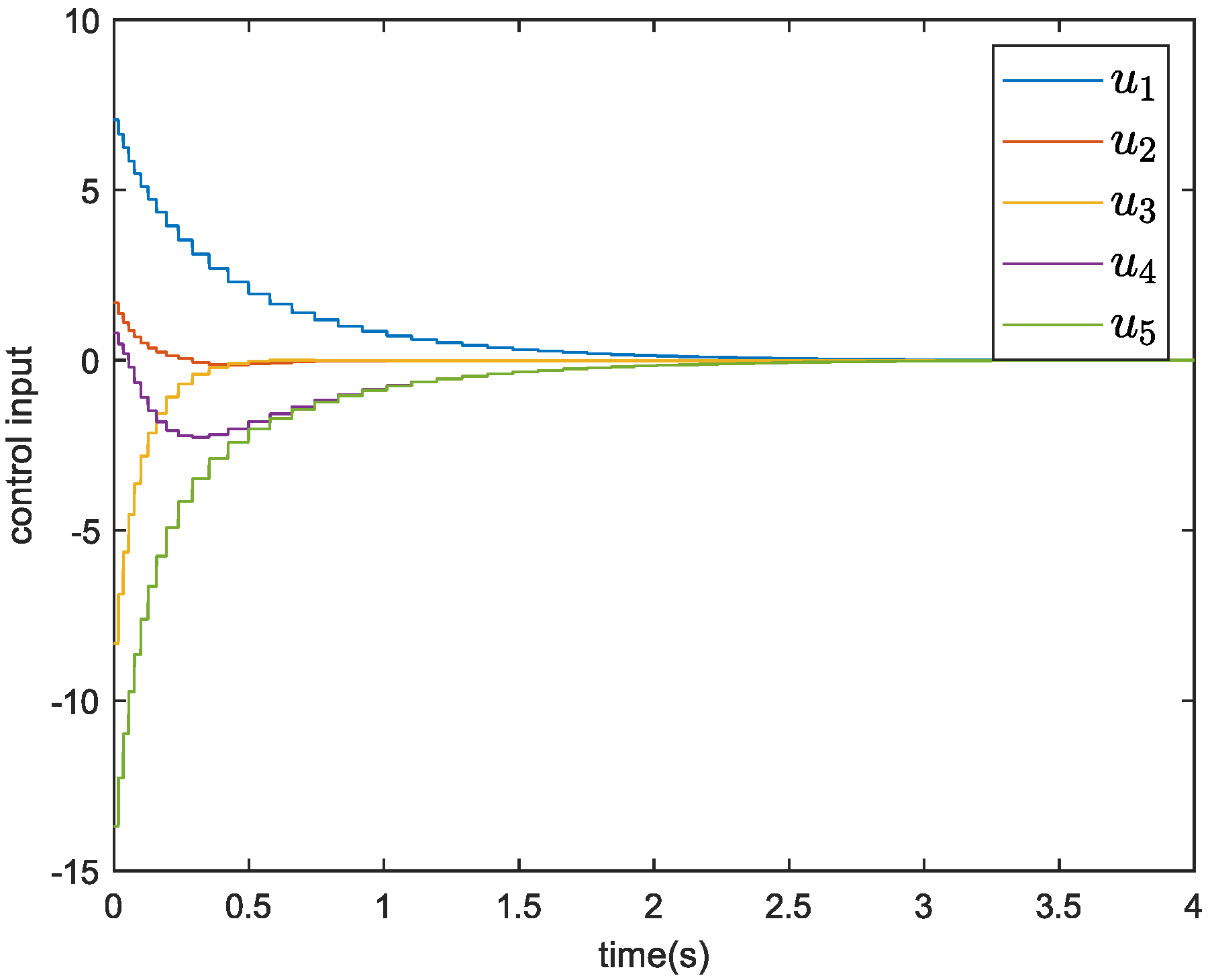
| Figure 5—under control protocol (39) | 7.04 s | 3.30 s |
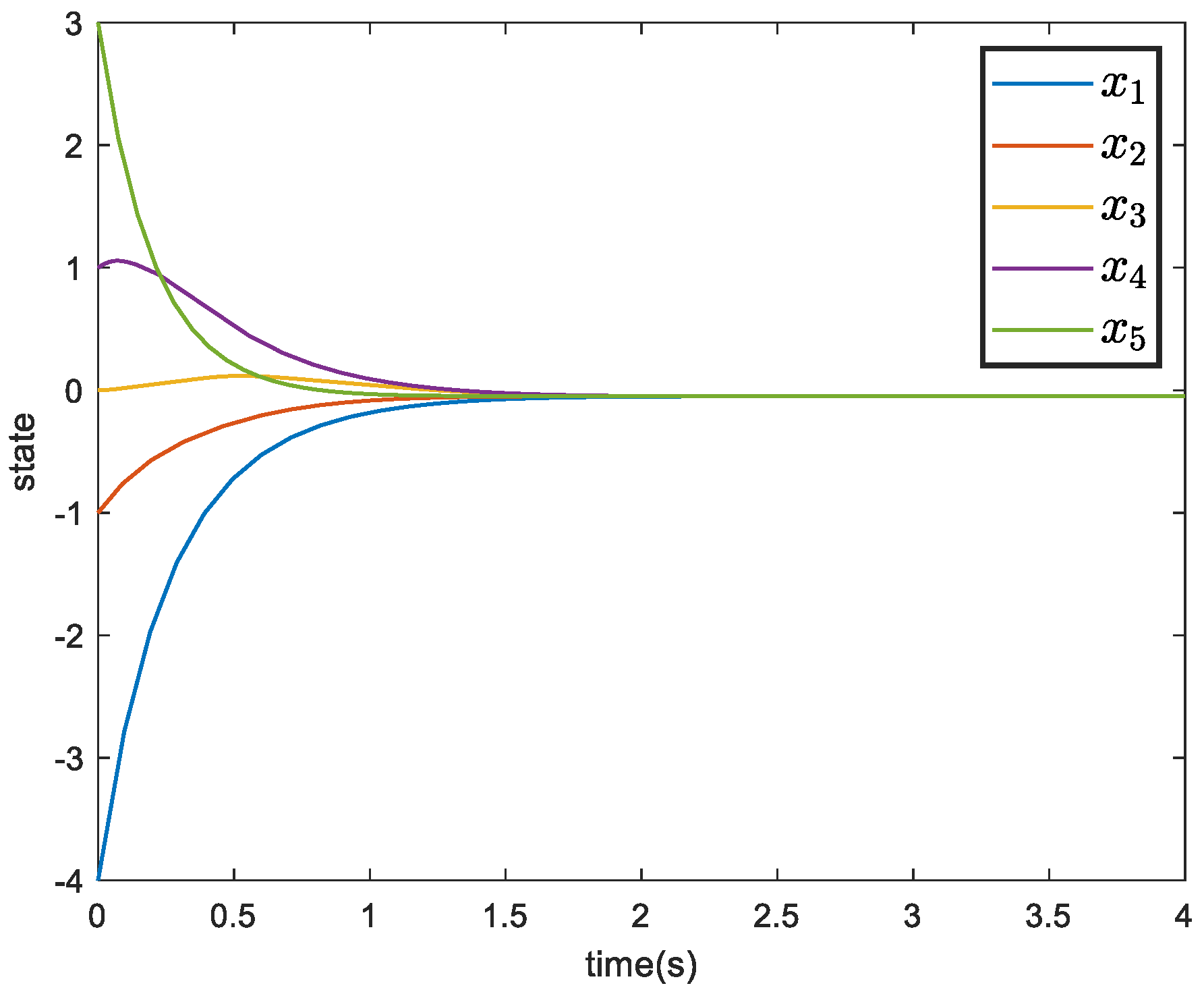
| Figure 7—under control protocol (7) | 1.52 s | 1.53 s |
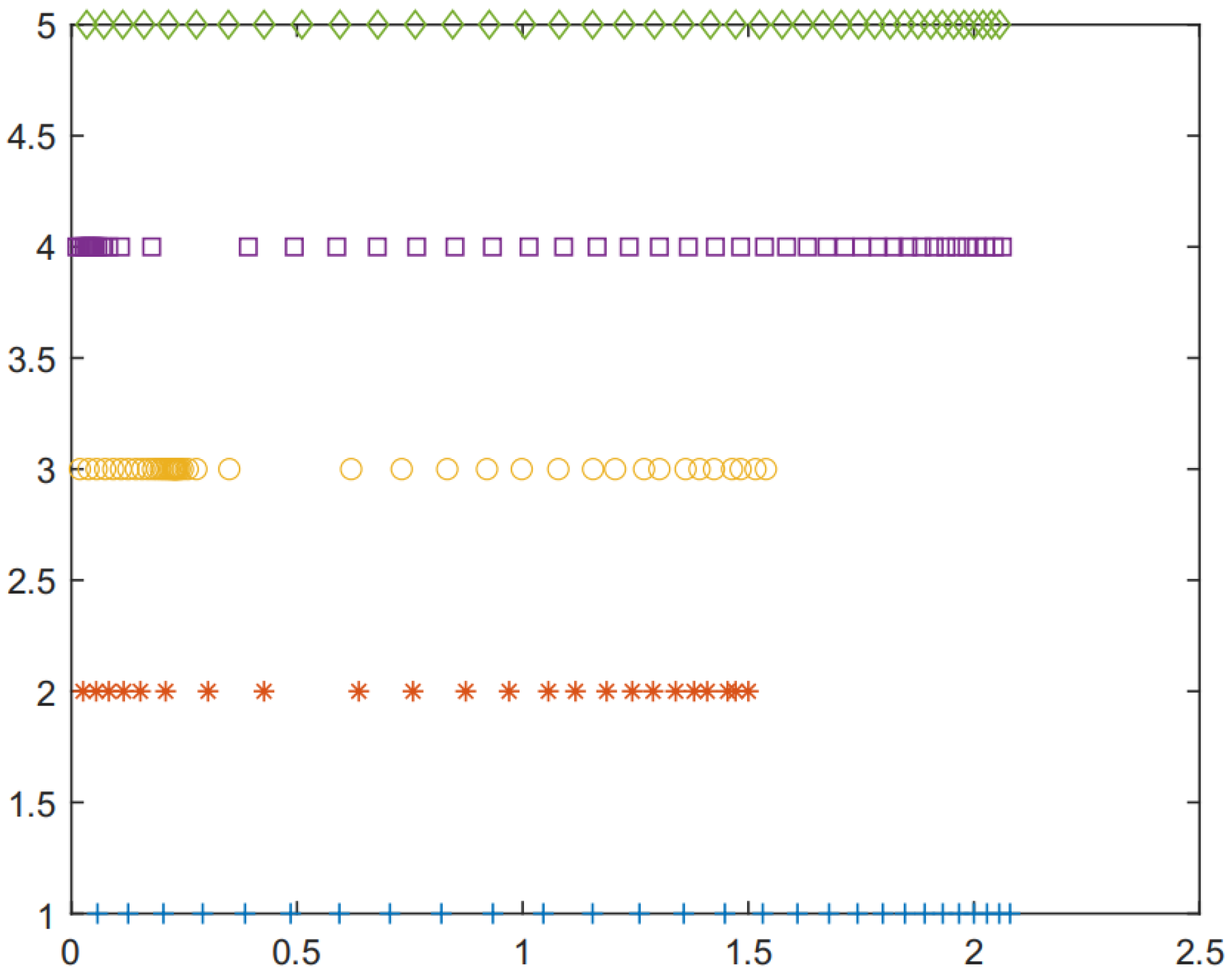
| Agent | the number of updates | |
| Figure 8—under control protocol (7) | Agent 1 | 28 |
| Agent 2 | 23 | |
| Agent 3 | 34 | |
| Agent 4 | 51 | |
| Agent 5 | 39 | |
| Figure 9—under control protocol (39) | Agent 1 | number of iterations 51 |
| Agent 2 | number of iterations 51 | |
| Agent 3 | number of iterations 51 | |
| Agent 4 | number of iterations 51 | |
| Agent 5 | number of iterations 51 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, T.; Li, Z. A Fixed-Time Event-Triggered Consensus of a Class of Multi-Agent Systems with Disturbed and Non-Linear Dynamics. Mathematics 2024, 12, 3009. https://doi.org/10.3390/math12193009
Wang Y, Wang T, Li Z. A Fixed-Time Event-Triggered Consensus of a Class of Multi-Agent Systems with Disturbed and Non-Linear Dynamics. Mathematics. 2024; 12(19):3009. https://doi.org/10.3390/math12193009
Chicago/Turabian StyleWang, Yueqing, Te Wang, and Zhi Li. 2024. "A Fixed-Time Event-Triggered Consensus of a Class of Multi-Agent Systems with Disturbed and Non-Linear Dynamics" Mathematics 12, no. 19: 3009. https://doi.org/10.3390/math12193009