Abstract
By introducing a set of exact disturbance estimators, a continuously tracking controller for a class of mismatched uncertain systems with exogenous disturbances will be proposed. The most appealing superiority is that the proposed exact disturbance estimators can not only estimate the external disturbances but also achieve an asymptotic estimation performance. Furthermore, with the help of a set of first-order asymptotic filters and an auxiliary system, the developed control algorithm is able to compensate for these total disturbances feedforwardly. Consequently, the whole closed-loop stability with an asymptotic tracking performance is strictly analyzed, and meanwhile applications are conducted to indicate the effectiveness of the proposed controller.
Keywords:
tracking control; nonlinear systems; disturbance estimator; disturbance observer; asymptotic estimation; asymptotic tracking; active disturbance rejection MSC:
93B52; 93C10; 93C40; 93C73; 93D20; 93D21
1. Introduction
Disturbances extensively exist in all practical systems, which may cause critical control performance degradation and even instability in developing high-performance closed-loop controllers [1,2,3]. Over the past decades, many advanced control algorithms such as adaptive robust control [4], robust adaptive control [5,6], sliding mode control [7,8] and so on have been proposed for various nonlinear systems to cope with modeling uncertainties. Additionally, many studies focus on rejecting disturbances by combining with disturbance observers.
Currently, there has been a growing interest in disturbance-observer-based control strategies with an active disturbance rejection ability for uncertain nonlinear systems [9,10,11,12,13,14,15,16,17,18]. And the main concept of these control strategies is to estimate the disturbances via different disturbance observers and thus compensate for them feedforwardly in developing the closed-loop controllers. Typically, Chen et al., proposed a nonlinear disturbance observer (NDOB) for nonlinear systems with disturbances governed by the exogenous system to estimate the total disturbances in an exponentially convergent rate [19]. It is worth noting that NDOB has been successfully applied to various practical systems [20,21]. Moreover, Won et al., have proposed a high-gain-disturbance-observer-based controller for hydraulic systems to improve the output tracking performance and meanwhile constrain the output tracking error [14]. Furthermore, Han has developed an active disturbance rejection controller (ADRC) for uncertain systems [22]. And the main support for ADRC is the extended state observer (ESO) [12,23,24]. Moreover, there are still some other disturbance observers [25,26,27] have been proposed. Notably, the aforementioned disturbance observers can only achieve a bounded estimation performance. How to develop exact disturbance estimators and meanwhile acquire an asymptotic tracking performance, especially for mismatched nonlinear systems, is extremely important and challenging in designing high-performance closed-loop controllers.
Inspired by the above discussions, we will propose an asymptotic tracking controller for systems with matched and mismatched exogenous disturbances, which is of great significance both in theory and practice. Especially, the main contributions of this paper are shown as follows:
- (1)
- A set of exact disturbance estimators (EDEs) with optimized design parameters which can acquire an asymptotic estimation performance is proposed;
- (2)
- Both mismatched and matched exogenous disturbances can be effectively compensated, and meanwhile an asymptotic tracking performance can be acquired.
Notation:
is the estimate of with being the estimation error; and sgn(•) is the signum function. In addition, the variable i = 1,…, n with n being the system order; the variable j = 1,…, n–1; and the variable θ = 2,…, n–1.
2. Problem Formulation
A class of nonlinear systems is employed as
where = [φ1,…, φi]T∈Ri with φi being the system states; and are known nonlinear functions, especially, ; denote unknown time-varying functions which can describe external disturbances; moreover, u and y are the control input and output, respectively.
Given a desired trajectory φ1d, the control objective is to design a continuously disturbance-compensation-based control law u for (1) so that y = φ1 can asymptotically track φ1d.
Assumption 1.
The desired trajectory φ1d∈Ϲ1.
Assumption 2.
exist and meanwhile are bounded.
Remark 1.
Notably, not only mismatched external disturbances fj(t) but also matched external disturbances fn(t) are simultaneously considered in Model (1), which means that it can be applied to many practical systems, such as motor servo systems [28,29] and so on.
3. Asymptotic Tracking Controller with Active Disturbance Rejection
3.1. Exact Disturbance Estimator
Inspired by the ESO, we extend the external disturbances fi(t) as new state variables φfi. According to Assumption 2, we can define and then transform the system (1) as
Stimulated by [30,31], a set of novel EDEs can be proposed as [32]
where Li1 and Li2 are adjustable positive design parameters; in addition, are the estimates of αi which satisfy (23) which will be introduced later.
As conducted in [23], we can parameterize Li1 and Li2 as 2βoi and , respectively, with βoi being adjustable positive design parameters. Therefore, (3) can be rearranged as
Especially, can be updated via
where λi are positive design parameters and ηi = [ηi1, ηi2]T= are new vectors. Due to incalculable variables existing in (5), we can obtain via the following method:
Noting (2) and (4), we can obtain
After introducing new vectors as ηi = [ηi1, ηi2]T= , we can rewrite (7) as
where Bo = and Co = [0 1]T.
As Bo is Hurwitz, there is a positive definite matrix Fo guaranteeing [12].
3.2. Controller Design
Firstly, we introduce a set of error variables ei(t) and compensation signals εi(t) as [33]
where e1 = φ1–φ1d(t) is the tracking error; ζi represent the auxiliary variables; and vjf indicate the filtered values of the virtual control laws vj to be synthesized later, which can be produced via the following filters [34].
where Lcj are the positive parameters; ξj = vj –vjf indicate the filtering errors; and δj(t) > 0 and satisfy , ≥ 0, with ϑi being some positive constants [34]; especially, σj represent the upper bounds of , which can be updated via
with rj being the adjustable positive gains.
An auxiliary system is introduced as [33]
where ki are the positive gains.
Step 1:
Differentiating ε1 via (1), (9) and (12), one has
Thus, v1 can be designed as
Substituting (14) into (13) yields
Step θ:
Differentiating εθ via (1), (9) and (12), one yields
Therefore, the virtual control law vθ can be designed as
Substituting (17) into (16) obtains
Step n:
Considering (1), (9) and (12), we can acquire the time derivative of εn as
Finally, the actual control law u can be designed as
Substituting (20) into (19) achieves
3.3. Main Theoretical Results
Proposition 1.
Define a set of auxiliary functions Qi(t) as:
If the parameters αi satisfy the following sufficient condition:
where Di1 = supt≥0|di(t)| and Di2 = supt≥0|| are some unknown positive constants. Hence, the following inequality holds
where .
Proof.
See Appendix A. □
Theorem 1.
Consider (1), the proposed controller with the designed EDEs in (4) can guarantee that all system signals are bounded as well as e1→0 and→0 as t→∞.
Proof.
See Appendix B. □
Remark 2.
Notably, some advanced control strategies [35,36] have been proposed. However, compared with these controllers, we have constructed a set of novel EDEs via the traditional ESO which can estimate the states and disturbances asymptotically. Additionally, to prevent over-parameterization ofand, we can constrain their adaptive laws through the projection mapping function in [1].
4. Illustration Example
A one-link robot arm driven by the permanent magnet direct-current motor will be employed to verify the performance of the designed controller. Deniting state variables φ1 = ym, φ2 and φ3 = KmIm/Jm, the considered system can be presented as follows
where ym and Im are the angular displacement of the load and the electric current, respectively; = 0, = 0, = –Bmφ2/Jm, f2(t) = Δ2(t)/Jm, = KmKv/(JmLm), = –KmKEφ2/(JmLm)–Rm/Lm, = KmΔ3(t)/(JmLm). The definitions and physical values of the system parameters are given in Table 1.

Table 1.
The physical parameters of the system.
For (25), the following four controllers are employed to track the trajectory φ1d = 0.1sin(πt)[1–exp(–0.01t3)]rad.
- (1)
-
Table 2. The controller parameters of C1.
- (2)
- C2: It is same as C1 but without compensation of the mismatched external disturbances.
- (3)
- C3: It is same as C1 but without compensation of the matched external disturbances.
- (4)
- C4: It is same as C1 but without compensation of the mismatched and matched external disturbances simultaneously.
For fairness, all design parameters of C2, C3 and C4 are chosen as same as that of C1.
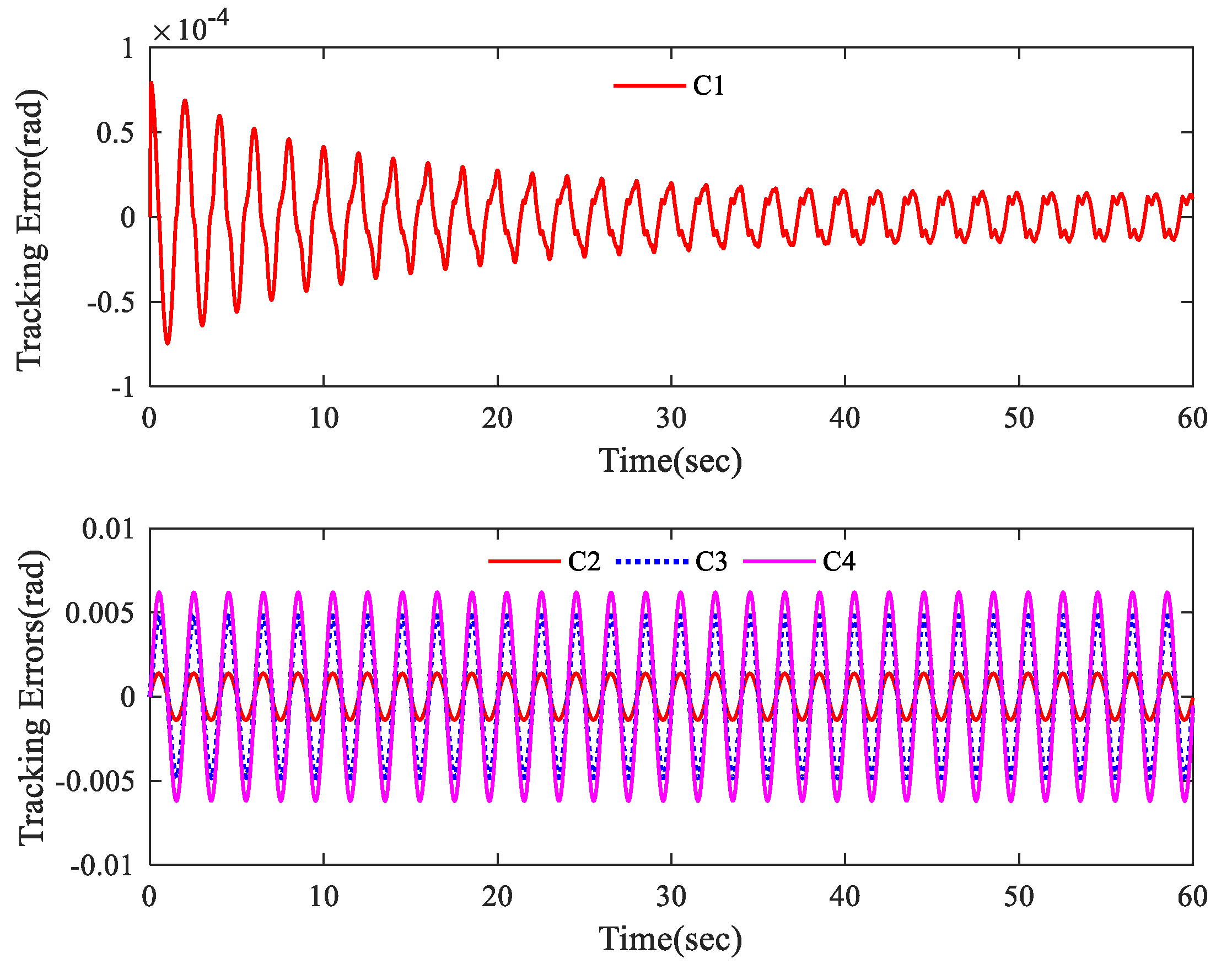
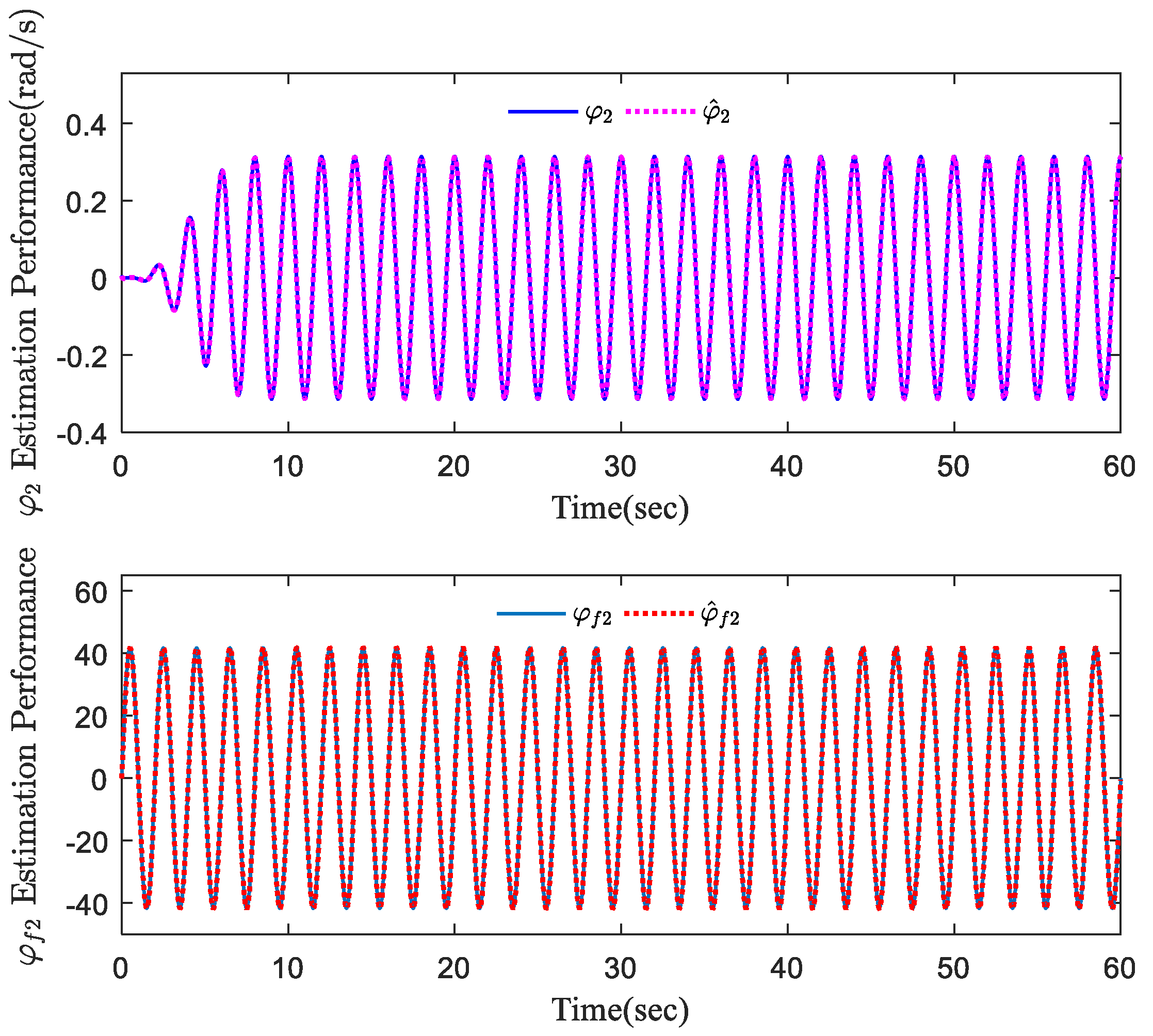
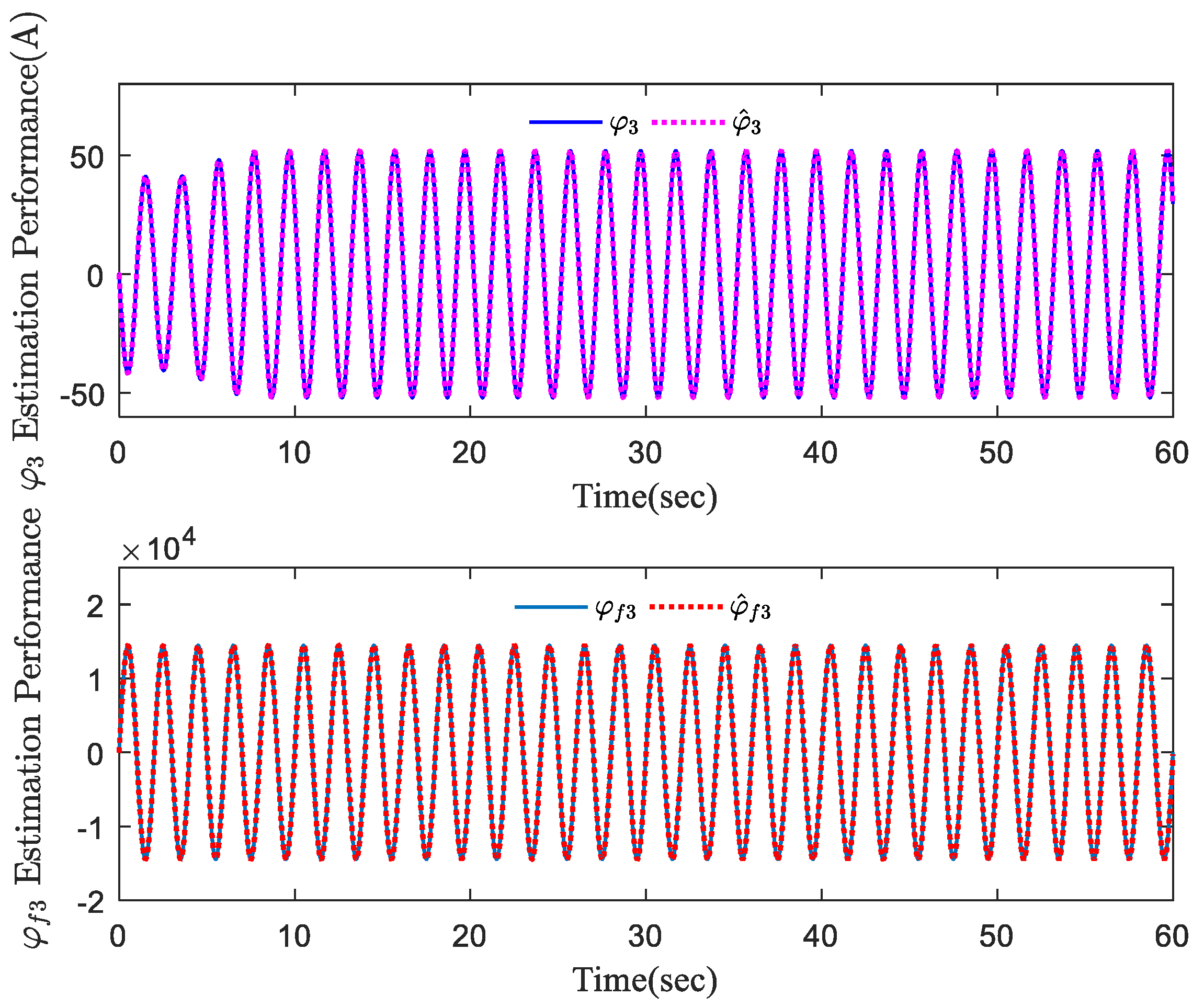
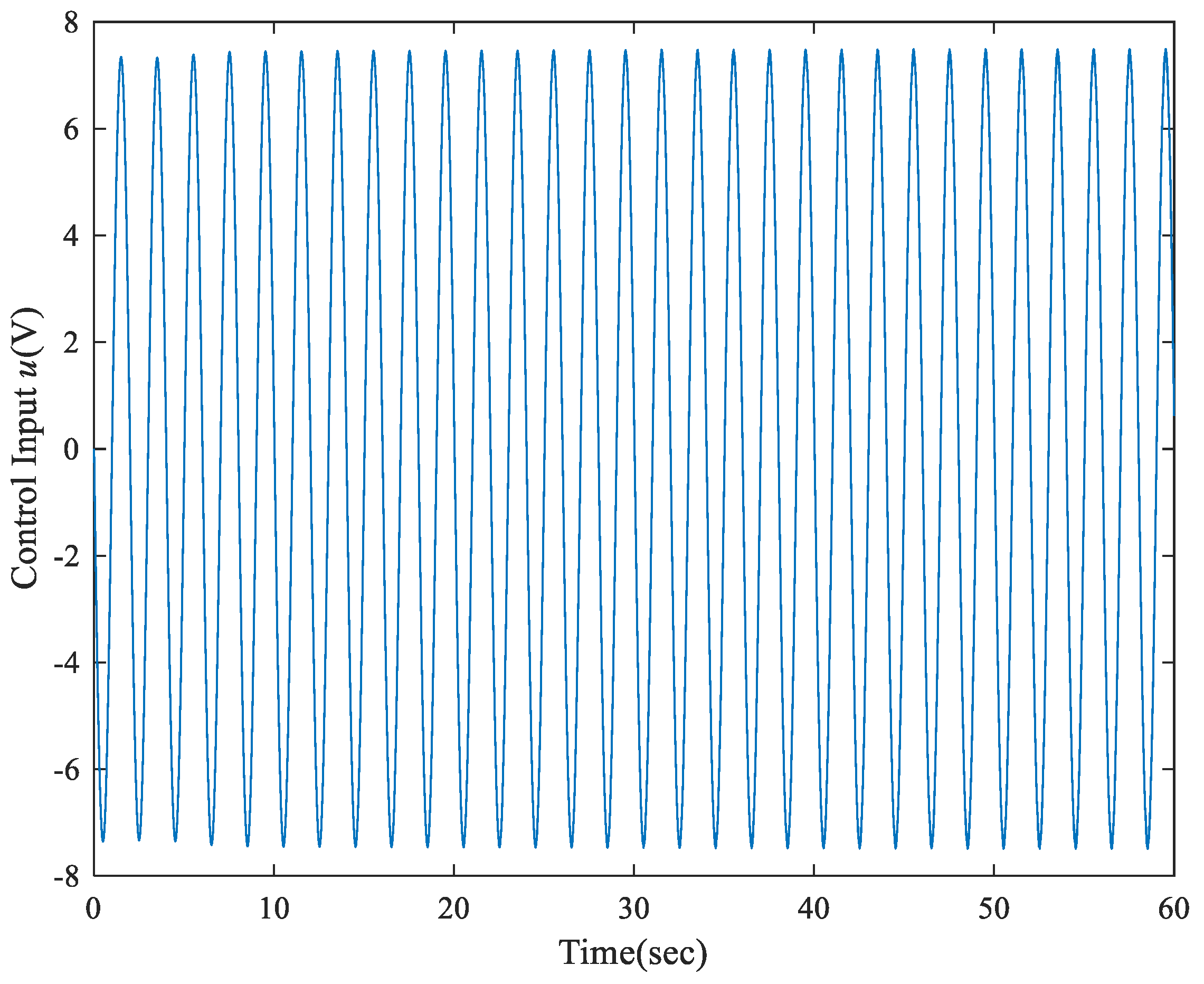
The contrastive tracking errors are plotted in Figure 1. It can be clearly discovered that C1 performs the best tracking performance in terms of both transient and final tracking errors, which verifies the effectiveness of the compensation performance for mismatched and matched external disturbances. Moreover, it follows from Figure 1 that the tracking error of C1 gradually approaches zero, which demonstrates the achievable asymptotic output tracking performance. Furthermore, it also means that mismatched and matched external disturbances can be exactly estimated by the introduced observer. To support this claim, the estimation performance of the system states and modeling uncertainties with the proposed observer (5) are exhibited in Figure 2 and Figure 3, respectively. In addition, Figure 4 plots the control input of C1, which demonstrates that the resulting control law is smooth and meanwhile bounded.
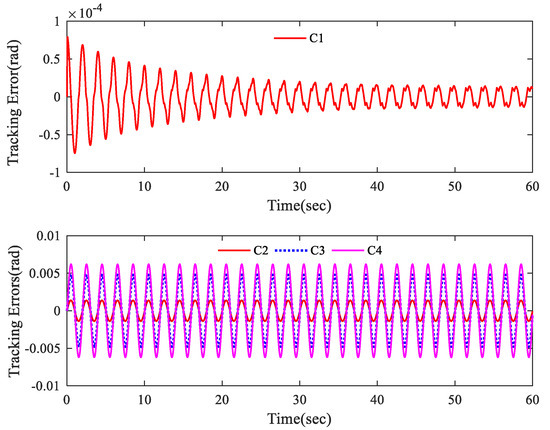
Figure 1.
Comparative tracking errors.
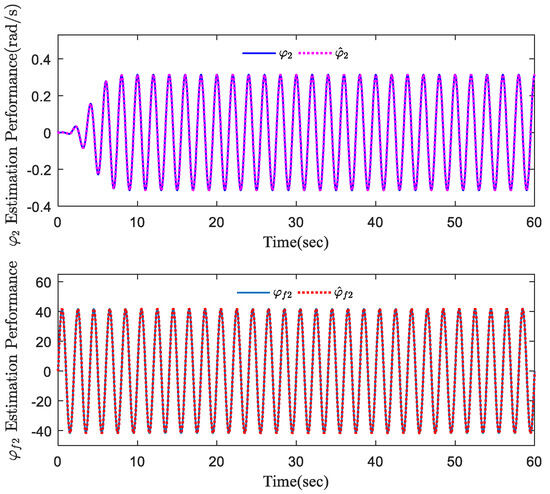
Figure 2.
Estimation performance of φ2 and φf2 with the constructed observer.
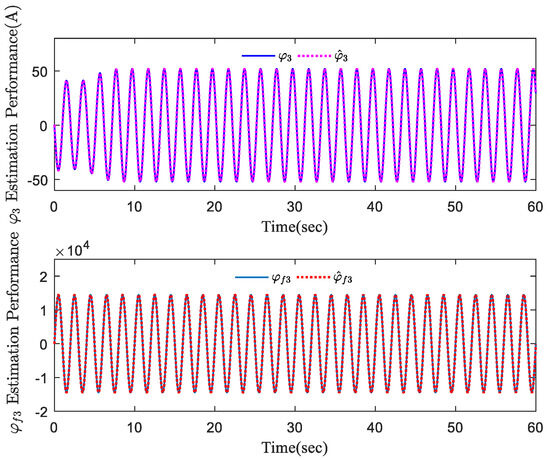
Figure 3.
Estimation performance of φ3 and φf3 with the constructed observer.
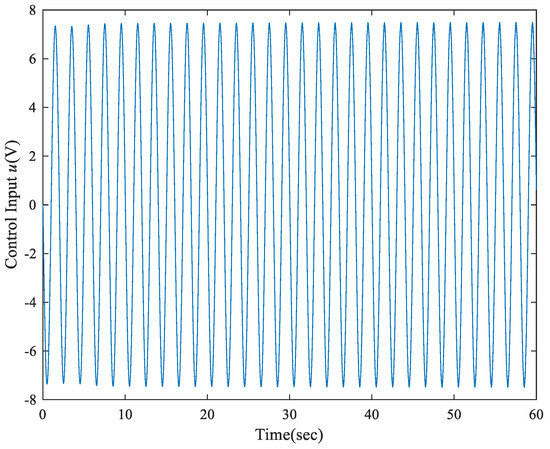
Figure 4.
The control input of C1.
5. Conclusions
A novel asymptotic tracking controller for a class of nonlinear systems with mismatched and matched exogenous disturbances has been proposed. Especially, a set of novel exact disturbance estimators with nonlinear robust terms to further reject disturbances has been creatively constructed to estimate the total disturbances in real time. Meanwhile, the exact disturbance estimations have been exploited in designing the resulting control scheme to eliminate the effects of disturbances. Especially, asymptotic tracking performance and asymptotic disturbance estimation performance have been demonstrated via strict theoretical analysis. In addition, the application on a one-link robotic arm driven by a direct-current servo motor has been conducted to verify the achievable results.
Author Contributions
Methodology, software, validation, formal analysis, investigation, funding acquisition, data curation, writing—original draft preparation, writing—review and editing, G.Y.; Supervision, investigation, validation, L.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China (52005249).
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A
Proof of Proposition 1
[30]. After integrating both sides of (22), one has
Therefore, we have
This proves Proposition 1. □
Appendix B
Proof of Theorem 1.
A set of auxiliary functions Wi is defined as:
It follows from Proposition 1 that Wi ≥ 0. Therefore, a Lyapunov candidate VL1 can be employed as
Based on (10), the filtering error dynamics can be arranged as
After substituting (12), (15), (18), (21) and (A5) into the time derivative of VL1, we have
Noting (5), (10) and (11), we have
Applying Young’s inequality, one has
where ςi are some positive constants.
Based on (A8), we can arrange (A7) as
Define a set of variables as follows
Therefore, we can rewrite (A10) as
After integrating two sides of (A11), this yields
It can be seen from (9) and (A12) that ei, εi, , , ξi, , ηi1 and ηi2∈L∞. Afterwards, vj and vjf ∈ L∞ can be proved. Moreover, can be inferred from (11). Furthermore, can be obtained due to Assumption 2 and ηi2 ∈ L∞. Thus, it can be deduced from Assumption 1 and (9) that the whole system’s signals stay bounded. And all estimation of the developed EDEs can be concluded as bounded. Notably, |ξjs| can be obtained from (10), which means ξjs∈L∞. Based on the above analysis, we can acquire u∈L∞. In addition, it can be inferred from (8), (9), (15), (18), (21) and (A5) that , , and ∈ L∞. As a result, ei→0, ηi1→0 and ηi2→0 as t→∞ can be obtained by exploiting Barbalat’s lemma, which proves Theorem 1 [29]. □
References
- Yang, G.; Yao, J. Multilayer neurocontrol of high-order uncertain nonlinear systems with active disturbance rejection. Int. J. Robust Nonlinear Control. 2024. ahead of print. [Google Scholar] [CrossRef]
- Radke, A.; Gao, Z. A survey of state and disturbance observers for practitioners. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: New York, NY, USA, 2006; pp. 5183–5188. [Google Scholar]
- Deng, W.; Yao, J. Asymptotic tracking control of mechanical servosystems with mismatched uncertainties. IEEE/ASME Trans. Mechatron. 2020, 26, 2204–2214. [Google Scholar] [CrossRef]
- Yao, B.; Tomizuka, M. Adaptive robust control of SISO nonlinear systems in a semi-strict feedback form. Automatica 1997, 33, 893–900. [Google Scholar] [CrossRef]
- Ge, S.S.; Fan, H.; Tong, H.L. Robust adaptive control of nonlinear systems with unknown time delays. Automatica 2005, 41, 1181–1190. [Google Scholar] [CrossRef]
- Wen, C.; Jing, Z.; Liu, Z.; Su, H. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans. Autom. Control 2011, 56, 1672–1678. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar]
- Yong, F.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar]
- Chen, W.H.; Ballance, D.J.; Gawthrop, P.J.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Dong, Z. Neuroadaptive learning algorithm for constrained nonlinear systems with disturbance rejection. Int. J. Robust Nonlinear Control 2022, 32, 6127–6147. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Zheng, Q.; Gao, L.Q.; Gao, Z. On validation of extended state observer through analysis and experimentation. J. Dyn. Syst. Meas. Contr. 2012, 134, 024505. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems. IEEE Trans. Control Syst. Technol. 2014, 23, 787–795. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- Guo, B.Z.; Wu, Z.H.; Zhou, H.C. Active disturbance rejection control approach to output-feedback stabilization of a class of uncertain nonlinear systems subject to stochastic disturbance. IEEE Trans. Autom. Control 2015, 61, 1613–1618. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, X.; Xia, Y.; Zuo, Z.; Wang, Y. Disturbance observer-based integral sliding-mode control for systems with mismatched disturbances. IEEE Trans. Ind. Electron. 2016, 63, 7040–7048. [Google Scholar] [CrossRef]
- Han, J.; Zhang, H.; Wang, Y.; Liu, X. Anti-disturbance control for nonlinear system via adaptive disturbance observer. Int. J. Robust Nonlinear Control 2017, 27, 2121–2144. [Google Scholar] [CrossRef]
- Chen, W.H. Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 2004, 9, 706–710. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Sun, C.; Guo, L. Nonlinear-disturbance-observer-based robust flight control for airbreathing hypersonic vehicles. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1263–1275. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Ullah, N. Neuroadaptive control of saturated nonlinear systems with disturbance compensation. ISA Trans. 2022, 122, 49–62. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Control Technique—The Technique for Estimating and Compensating the Uncertainties; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: New York, NY, USA, 2006; pp. 2399–2405. [Google Scholar]
- Johnson, C. Accomodation of external disturbances in linear regulator and servomechanism problems. IEEE Trans. Autom. Control 1971, 16, 635–644. [Google Scholar] [CrossRef]
- Johnson, C. Optimal control of the linear regulator with constant disturbances. IEEE Trans. Autom. Control 1968, 13, 416–421. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Kuperman, A.; Stobart, R.K. Design of UDE-based controllers from their two-degree-of-freedom nature. Int. J. Robust Nonlinear Control 2011, 21, 1994–2008. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Su, J.; Yu, X. Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances. Automatica 2013, 49, 2287–2291. [Google Scholar] [CrossRef]
- Yang, G. Asymptotic tracking with novel integral robust schemes for mismatched uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2023, 33, 1988–2002. [Google Scholar] [CrossRef]
- Xian, B.; Dawson, D.M.; de Queiroz, M.S.; Chen, J. A continuous asymptotic tracking control strategy for uncertain nonlinear systems. IEEE Trans. Autom. Control 2004, 49, 1206–1211. [Google Scholar] [CrossRef]
- Xian, B.; de Queiroz, M.S.; Dawson, D.M.; McIntyre, M.L. A discontinuous output feedback controller and velocity observer for nonlinear mechanical systems. Automatica 2004, 40, 695–700. [Google Scholar] [CrossRef]
- Zou, X.; Yang, G.; Hong, R.; Dai, Y. Chattering-free terminal sliding-mode tracking control for uncertain nonlinear systems with disturbance compensation. J. Vib. Control 2023. [Google Scholar] [CrossRef]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command filtered backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Liu, Y.H. Adaptive dynamic surface asymptotic tracking for a class of uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2018, 28, 1233–1245. [Google Scholar] [CrossRef]
- Guo, B.Z.; Jin, F.F. The active disturbance rejection and sliding mode control approach to the stabilization of the Euler–Bernoulli beam equation with boundary input disturbance. Automatica 2013, 49, 2911–2918. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Process. 2021, 158, 107769. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).