
Dynamically Meaningful Latent Representations of Dynamical Systems

Abstract
1. Introduction
2. Models
2.1. fKdV Equation
2.2. Kuramoto–Sivashinksy Equation
3. Long Time Dynamics
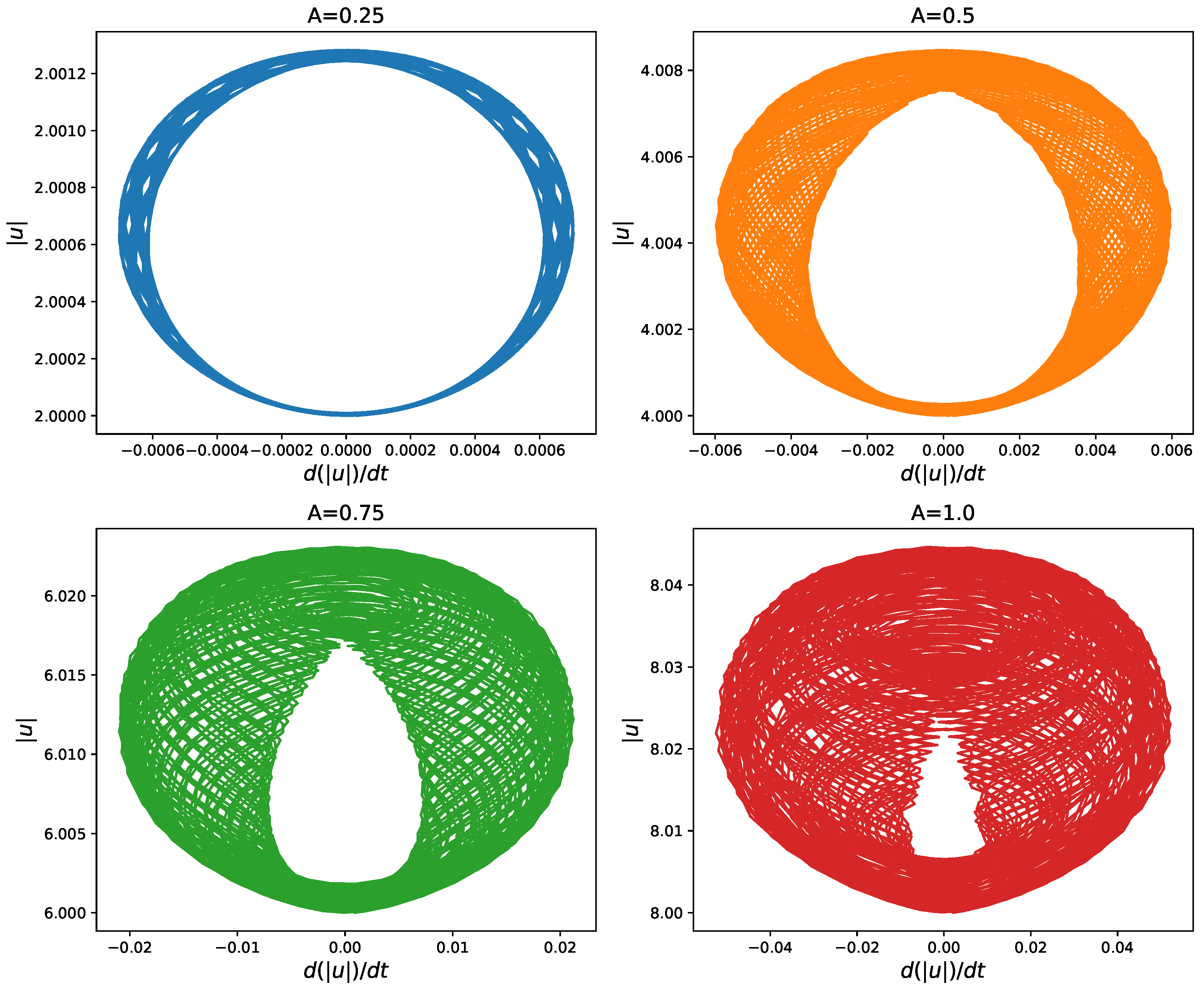
3.1. fKdV: Effects of Amplitude and Wavenumber
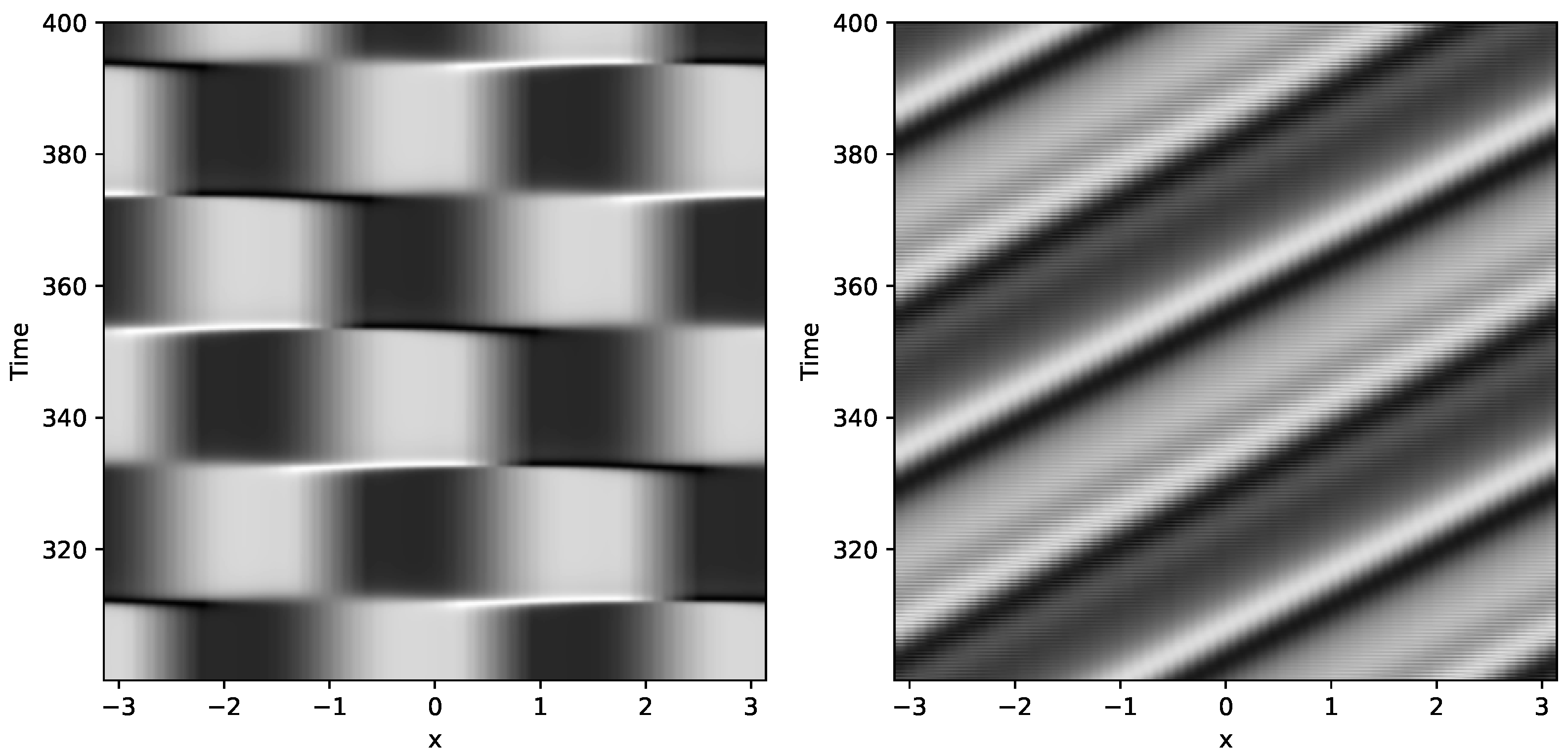
3.2. KS: Long Time Dynamics
4. Interpretable Deep Learning-Based Reduced Order Model
4.1. fKdV Latent Representation
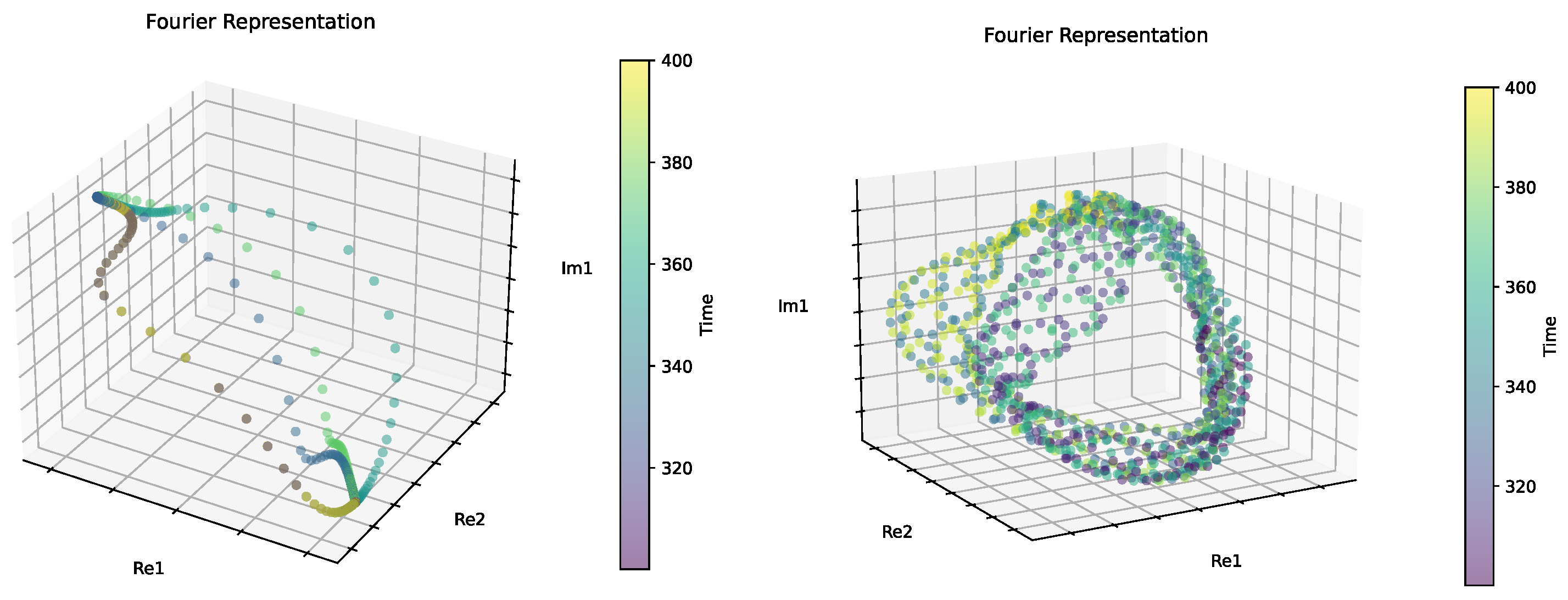
4.2. KS Latent Representation
5. Topology Preservation
5.1. Persistent Homology
5.2. Persistence Diagrams
6. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
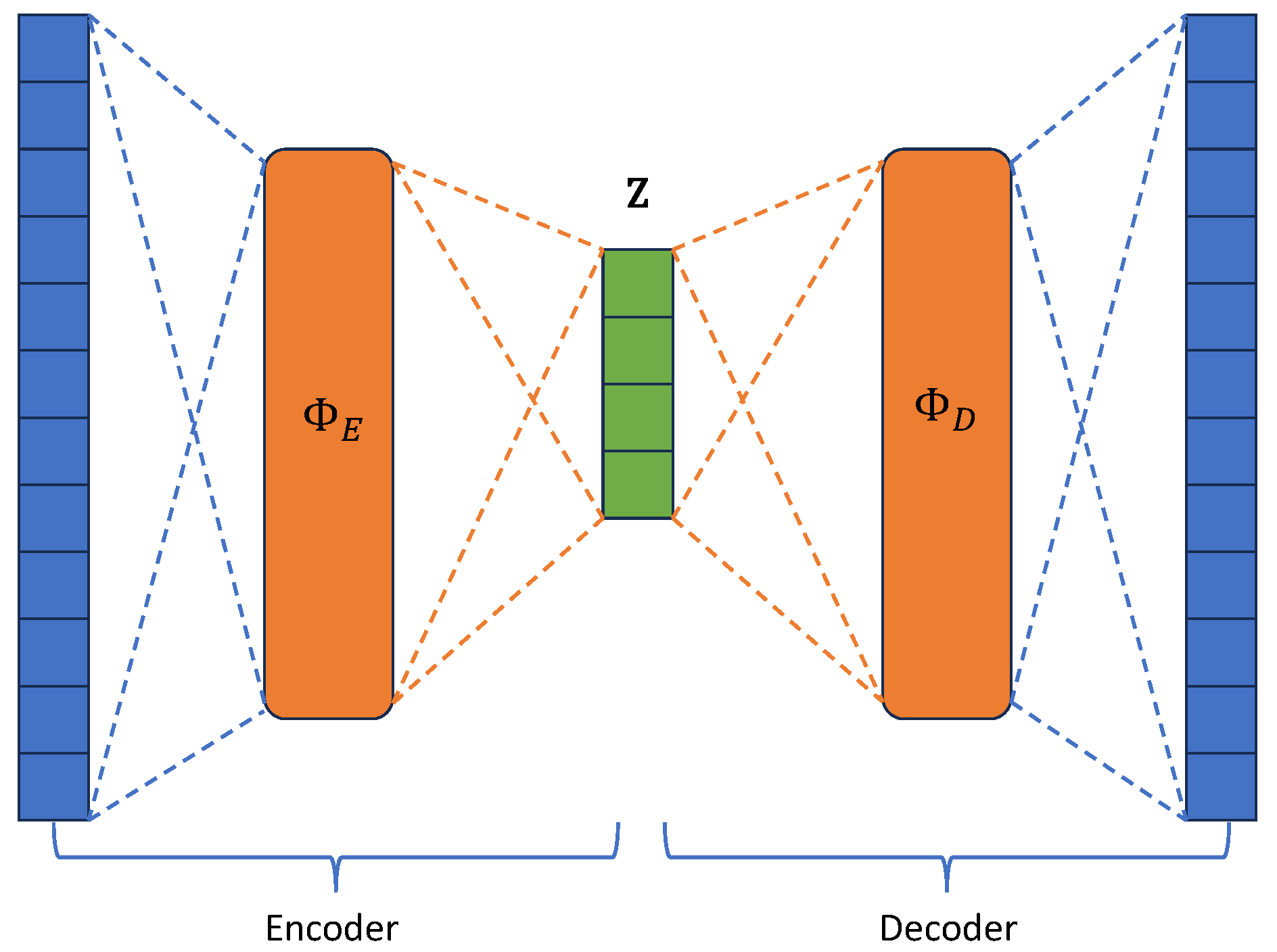
Appendix A. Autoencoder Model Architecture and Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Dimension | Activations | Epochs |
|---|---|---|---|
| Encoder | :32:64:32: | Linear:ReLU:Linear:ReLU:Linear | 1000 |
| Decoder | :32:64:32: | Linear:ReLU:Linear:ReLU:Linear:Sigmoid | 1000 |
Appendix B. Bifurcation Classification of the fKdV
References
- Champion, K.; Lusch, B.; Kutz, J.N.; Brunton, S.L. Data-driven discovery of coordinates and governing equations. Proc. Natl. Acad. Sci. USA 2019, 116, 22445–22451. [Google Scholar] [CrossRef]
- Maulik, R.; Lusch, B.; Balaprakash, P. Reduced-order modeling of advection-dominated systems with recurrent neural networks and convolutional autoencoders. Phys. Fluids 2021, 33, 037106. [Google Scholar] [CrossRef]
- Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Natl. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef] [PubMed]
- Lusch, B.; Kutz, J.N.; Brunton, S.L. Deep learning for universal linear embeddings of nonlinear dynamics. Nat. Commun. 2018, 9, 4950. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Lee, K.; Carlberg, K.T. Model reduction of dynamical systems on nonlinear manifolds using deep convolutional autoencoders. J. Comput. Phys. 2020, 404, 108973. [Google Scholar] [CrossRef]
- Linot, A.J.; Graham, M.D. Deep learning to discover and predict dynamics on an inertial manifold. Phys. Rev. E 2020, 101, 062209. [Google Scholar] [CrossRef] [PubMed]
- Schonsheck, S.; Chen, J.; Lai, R. Chart auto-encoders for manifold structured data. arXiv 2019, arXiv:1912.10094. [Google Scholar]
- Floryan, D.; Graham, M.D. Data-driven discovery of intrinsic dynamics. Nat. Mach. Intell. 2022, 4, 1113–1120. [Google Scholar] [CrossRef]
- Zeng, K.; Graham, M.D. Autoencoders for discovering manifold dimension and coordinates in data from complex dynamical systems. arXiv 2023, arXiv:2305.01090. [Google Scholar]
- Fefferman, C.; Mitter, S.; Narayanan, H. Testing the manifold hypothesis. J. Am. Math. Soc. 2016, 29, 983–1049. [Google Scholar] [CrossRef]
- Foias, C.; Sell, G.R.; Temam, R. Inertial manifolds for nonlinear evolutionary equations. J. Differ. Equ. 1988, 73, 309–353. [Google Scholar] [CrossRef]
- Temam, R.; Wang, X. Estimates On The Lowest Dimension Of Inertial Manifolds For The Kuramoto-Sivasbinsky Equation in The General Case. Differ. Integral Equ. 1994, 7, 1095–1108. [Google Scholar]
- Chepyzhov, V.V.; Višik, M.I. Attractors for Equations of Mathematical Physics; Number 49 in Colloquium Publications; American Mathematical Society: Providence, RI, USA, 2002. [Google Scholar]
- Zelik, S. Attractors. Then and now. arXiv 2022, arXiv:2208.12101. [Google Scholar]
- Tutueva, A.; Nepomuceno, E.G.; Moysis, L.; Volos, C.; Butusov, D. Adaptive Chaotic Maps in Cryptography Applications. In Cybersecurity: A New Approach Using Chaotic Systems; Abd El-Latif, A.A., Volos, C., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 193–205. [Google Scholar]
- Neamah, A.A.; Shukur, A.A. A Novel Conservative Chaotic System Involved in Hyperbolic Functions and Its Application to Design an Efficient Colour Image Encryption Scheme. Symmetry 2023, 15, 1511. [Google Scholar] [CrossRef]
- Li, R.; Lu, T.; Wang, H.; Zhou, J.; Ding, X.; Li, Y. The Ergodicity and Sensitivity of Nonautonomous Discrete Dynamical Systems. Mathematics 2023, 11, 1384. [Google Scholar] [CrossRef]
- Ruelle, D. Small random perturbations of dynamical systems and the definition of attractors. Commun. Math. Phys. 1981, 82, 137–151. [Google Scholar] [CrossRef]
- Katok, A.; Hasselblatt, B. Introduction to the Modern Theory of Dynamical Systems; Number 54; Cambridge University Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Springer: Berlin/Heidelberg, Germany, 2013; Volume 42. [Google Scholar]
- Raugel, G. Global Attractors in Partial Diffenrential Equations; Département de Mathématique, Université de Paris-Sud: Orsay, France, 2001. [Google Scholar]
- Mielke, A.; Zelik, S.V. Infinite-Dimensional Hyperbolic Sets and Spatio-Temporal Chaos in Reaction Diffusion Systems in. J. Dyn. Differ. Equ. 2007, 19, 333–389. [Google Scholar] [CrossRef]
- Doedel, E.J.; Champneys, A.R.; Fairgrieve, T.; Kuznetsov, Y.; Oldeman, B.; Paffenroth, R.; Sandstede, B.; Wang, X.; Zhang, C. Auto-07p: Continuation and Bifurcation Software for Ordinary Differential Equations. 2007. Available online: http://indy.cs.concordia.ca/auto (accessed on 10 September 2023).
- Dhooge, A.; Govaerts, W.; Kuznetsov, Y.A.; Meijer, H.G.E.; Sautois, B. New features of the software MatCont for bifurcation analysis of dynamical systems. Math. Comput. Model. Dyn. Syst. 2008, 14, 147–175. [Google Scholar] [CrossRef]
- Dankowicz, H.; Schilder, F. Recipes for Continuation; SIAM: Philadelphia, PA, USA, 2013. [Google Scholar]
- Binder, B.; Vanden-Broeck, J.M. Free surface flows past surfboards and sluice gates. Eur. J. Appl. Math. 2005, 16, 601–619. [Google Scholar] [CrossRef]
- Binder, B.J. Steady Two-Dimensional Free-Surface Flow Past Disturbances in an Open Channel: Solutions of the Korteweg–De Vries Equation and Analysis of the Weakly Nonlinear Phase Space. Fluids 2019, 4, 24. [Google Scholar] [CrossRef]
- Kuramoto, Y. Diffusion-Induced Chaos in Reaction Systems. Prog. Theor. Phys. Suppl. 1978, 64, 346–367. [Google Scholar] [CrossRef]
- Kirby, M.; Armbruster, D. Reconstructing phase space from PDE simulations. Z. Angew. Math. Phys. 1992, 43, 999–1022. [Google Scholar] [CrossRef]
- Rowley, C.W.; Marsden, J.E. Reconstruction equations and the Karhunen–Loève expansion for systems with symmetry. Phys. D Nonlinear Phenom. 2000, 142, 1–19. [Google Scholar] [CrossRef]
- Lax, P.D. Almost periodic solutions of the KdV equation. SIAM Rev. 1976, 18, 351–375. [Google Scholar] [CrossRef]
- Kevrekidis, I.G.; Nicolaenko, B.; Scovel, J.C. Back in the saddle again: A computer assisted study of the Kuramoto–Sivashinsky equation. SIAM J. Appl. Math. 1990, 50, 760–790. [Google Scholar] [CrossRef]
- Otter, N.; Porter, M.A.; Tillmann, U.; Grindrod, P.; Harrington, H.A. A roadmap for the computation of persistent homology. EPJ Data Sci. 2017, 6, 1–38. [Google Scholar] [CrossRef]
- Chazal, F.; Michel, B. An Introduction to Topological Data Analysis: Fundamental and Practical Aspects for Data Scientists. Front. Artif. Intell. 2021, 4. [Google Scholar] [CrossRef]
- Rubio, J.; Sergeraert, F. Constructive algebraic topology. Bull. Des Sci. Math. 2002, 126, 389–412. [Google Scholar] [CrossRef]
- Edelsbrunner, H.; Letscher, D.; Zomorodian, A. Topological persistence and simplification. Discret. Comput. Geom. 2002, 28, 511–533. [Google Scholar] [CrossRef]
- Vietoris, L. Über den höheren Zusammenhang kompakter Räume und eine Klasse von zusammenhangstreuen Abbildungen. Math. Ann. 1927, 97, 454–472. [Google Scholar] [CrossRef]
- Skraba, P.; Turner, K. Wasserstein stability for persistence diagrams. arXiv 2020, arXiv:2006.16824. [Google Scholar]
- Mileyko, Y.; Mukherjee, S.; Harer, J. Probability measures on the space of persistence diagrams. Inverse Probl. 2011, 27, 124007. [Google Scholar] [CrossRef]
- Moor, M.; Horn, M.; Rieck, B.; Borgwardt, K. Topological autoencoders. Proc. Mach. Learn. Res. 2020, 119, 7045–7054. [Google Scholar]
- Kuznetsov, Y.A.; Kuznetsov, I.A.; Kuznetsov, Y. Elements of Applied Bifurcation Theory; Springer: New York, NY, USA, 1998; Volume 112. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasim, I.; Henderson, M.E. Dynamically Meaningful Latent Representations of Dynamical Systems. Mathematics 2024, 12, 476. https://doi.org/10.3390/math12030476
Nasim I, Henderson ME. Dynamically Meaningful Latent Representations of Dynamical Systems. Mathematics. 2024; 12(3):476. https://doi.org/10.3390/math12030476
Chicago/Turabian StyleNasim, Imran, and Michael E. Henderson. 2024. "Dynamically Meaningful Latent Representations of Dynamical Systems" Mathematics 12, no. 3: 476. https://doi.org/10.3390/math12030476
APA StyleNasim, I., & Henderson, M. E. (2024). Dynamically Meaningful Latent Representations of Dynamical Systems. Mathematics, 12(3), 476. https://doi.org/10.3390/math12030476