1. Introduction and Overview
The quest for space exploration has never been more vibrant, with ambitions stretching from returning humans to the Moon, establishing a sustainable presence there, and eventually venturing further to Mars and beyond. These endeavors represent not just a testament to human curiosity and ingenuity but also pose a myriad of technical challenges that need addressing to make such ambitious goals feasible. One of the most critical challenges lies in the realm of propulsion technology—a field that plays a pivotal role in determining the success of interplanetary missions. The efficiency of propulsion systems directly impacts the mission’s cost, duration, and overall feasibility, making it a central focus for researchers and engineers in the aerospace domain.
In the context of space missions [
1], propulsion efficiency and propellant optimization are paramount. The choice of propulsion system affects everything from the launch vehicle’s payload capacity to the spacecraft’s ability to conduct maneuvers such as orbit insertion, landing, and return trips. Given the constraints of current technology and the high costs associated with launching mass into space, optimizing the use of propellant becomes a critical endeavor. The efficient use of propellant not only reduces mission costs but also enables more ambitious mission profiles by allowing spacecraft to carry additional scientific instruments, extend their operational lifetimes, or support larger human crews.
Propulsion systems for space exploration can broadly be classified into two categories: chemical and electric propulsion. Chemical propulsion systems, which have been the backbone of space exploration since its inception, rely on the combustion of chemical propellants to produce thrust. While offering high thrust-to-weight ratios and allowing for quick maneuvers, their efficiency, measured in terms of specific impulse, is inherently limited by the chemical energy stored in propellants.
On the other hand, electric propulsion systems, which include ion and Hall effect thrusters, offer significantly higher specific impulses by accelerating ions or plasma using electric fields. The trade-off, however, comes in the form of lower thrust levels and the need for electrical power, typically supplied by solar panels or nuclear power sources. Electric propulsion’s high efficiency makes it particularly attractive for deep-space missions and orbit maintenance, where the low thrust levels are sufficient and the cumulative effect of prolonged thrust can significantly alter a spacecraft’s trajectory.
As we stand on the brink of a new era in space exploration, the development and optimization of propulsion systems remain at the forefront of aerospace engineering challenges. This paper aims to delve into the intricacies of propulsion efficiency and propellant optimization, exploring both theoretical frameworks and practical applications to enhance the capabilities of future space missions. Through a comprehensive analysis of chemical and electric propulsion systems, this work seeks to contribute to the ongoing efforts to make humanity a truly spacefaring civilization.
While our study primarily focuses on chemical and electric propulsion systems, including the application of Nuclear Electric Propulsion (NEP), it is important to recognize the broader spectrum of propulsion technologies that contribute to space exploration. Notably, Nuclear Thermal Propulsion (NTP) [
2] presents a hybrid approach, where a nuclear reactor directly heats the propellant, yielding a specific impulse superior to chemical systems but not as high as that of electric options. Though NTP shows promise for certain mission profiles, our analysis concentrates on chemical propulsion for its robust thrust capabilities and electric propulsion for its exceptional efficiency and suitability for deep space operations. As we explore the advantages of chemical and electric propulsion systems, NEP also warrants mention. NEP synergizes the high efficiency of electric propulsion with the high-energy density of nuclear power, making it an attractive option for missions that demand significant electrical power without reliance on solar energy, which diminishes with distance from the Sun. This method employs a nuclear reactor to generate the electricity required to power ion thrusters or Hall effect thrusters, marrying the sustainability of nuclear energy with the high specific impulse of electric propulsion. It is within this context that our paper delves into optimizing propellant distribution strategies, tailoring our analysis to chemical and electric systems due to their current technological maturity and immediate relevance to ongoing and planned space missions. While NTP offers intriguing possibilities, particularly for high-thrust requirements in deep-space transit, it remains under active development with unique challenges, including the safe handling and launch of nuclear materials. Our focus remains on the near-to-mid-term applicability of propulsion systems, seeking to enhance the design and planning of missions within the current technological and safety paradigms.
Following the introduction and overview, the structure of this paper is organized as follows:
Section 2 provides a detailed review of the existing literature and prior research, setting the stage for understanding the advancements and gaps in the domain of propulsion technology for space exploration.
Section 3 outlines our research methodology, detailing the theoretical models and computational approaches employed to analyze propulsion efficiencies and optimize propellant distribution. In
Section 4, we present the findings of our optimization model, showcasing the potential reductions in propellant mass and the strategic use of hybrid propulsion systems.
Section 5 delves into the implications of our research, discussing the significance of the results in the context of current challenges and future directions in space exploration propulsion systems. Subsequently,
Section 6 provides a comprehensive evaluation of the proposed optimization framework through a series of simulations and comparative analyses, further demonstrating its utility and robustness in realistic mission scenarios. Finally,
Section 7 summarizes the key takeaways from our study, highlighting the contributions to the field and suggesting avenues for further research to advance the capabilities of propulsion systems for interplanetary missions. This comprehensive structure aims to provide clarity and insight into the optimization of propellant distribution, a critical factor in the success of future space exploration endeavors.
2. Related Works
The development and evolution of propulsion systems for space exploration have been well documented in recent decades, with a rich body of literature covering a wide array of propulsion technologies. From the early days of rocketry, characterized by the pioneering work of Goddard, Oberth, and Tsiolkovsky [
3,
4,
5], to the modern era of ion thrusters and Hall effect engines [
6,
7,
8,
9], the quest for more efficient and reliable propulsion methods has been a constant theme in aerospace engineering research.
Chemical propulsion systems, utilizing bipropellant or solid rocket motors, have been extensively studied and employed in a vast majority of space missions. Their reliability and high thrust capabilities make them the preferred choice for launch vehicles and mission segments requiring significant delta-v changes in short time frames, such as planetary landings and takeoffs. Seminal works by Sutton and Biblarz (2010) [
10] provide a comprehensive overview of the principles and design considerations for chemical propulsion, including detailed analyses of propellant chemistry, engine design, and performance metrics.
Electric propulsion systems have gained prominence in the latter part of the 20th century, with research intensifying in the 1990s and 2000s. The higher specific impulse of electric propulsion systems, as compared to their chemical counterparts, presents a compelling case for their use in missions where efficiency trumps the need for immediate thrust. Studies by Goebel and Katz (2008) [
11] delve into the physics and engineering of electric propulsion, covering a range of technologies including ion thrusters, Hall thrusters, and newer concepts like VASIMR. The literature highlights the successful application of electric propulsion in missions such as Deep Space 1 [
12] and the Dawn spacecraft [
13], underscoring its potential for future exploration endeavors.
While the body of research on propulsion systems for future space missions is extensive [
14,
15,
16,
17], there remains a notable gap in the literature concerning the optimization of these systems specifically for lunar missions and other celestial bodies. For instance, the unique challenges posed by lunar exploration, including the Moon’s weak gravitational field, the absence of an atmosphere, and the varying distances between the Earth and the Moon, necessitate tailored propulsion solutions.
The majority of existing studies focus on propulsion system selection and design for interplanetary missions or Earth-orbit maintenance, with less emphasis on the particular requirements for specific missions. This includes the optimization of propulsion systems for cislunar transfer, lunar orbit insertion, surface landing, and return trajectories. Furthermore, there is a scarcity of comprehensive analyses that compare the efficacy and efficiency of chemical versus electric propulsion systems across the different phases of exploration [
18,
19,
20], taking into account the recent advancements in electric propulsion technologies and the potential for in situ resource utilization (ISRU) to produce propellants on the Moon and other planets.
This gap in the literature presents an opportunity for further research to explore propulsion optimization strategies tailored to the unique conditions and objectives of exploration for example in the Moon, Mars, and Venus [
21,
22,
23]. Such studies could significantly contribute to the design of more efficient, cost-effective lunar missions, supporting the broader goal of establishing a sustainable human presence on the Moon and beyond [
24,
25,
26]. The upcoming sections of this paper aim to address these gaps, presenting new findings and insights that leverage the latest advancements in propulsion technology and mission planning methodologies.
In addition to the well-established chemical and electric propulsion systems, and Nuclear Thermal Propulsion (NTP) [
2], the field of space propulsion continuously evolves with the exploration of advanced concepts that promise to redefine the boundaries of interstellar travel. Among these, Bussard-type thermonuclear spacecraft engines, originally proposed by Bussard [
27], have captivated the imagination of scientists and engineers with the prospect of harvesting interstellar matter to fuel long-duration space voyages. The theoretical Bussard ramjet, and its various modern interpretations [
28,
29], offer intriguing possibilities for propulsion by collecting and utilizing diffuse galactic matter, though practical implementation remains a significant challenge. Similarly, plasma thrusters represent another frontier in propulsion technology [
30], which leverage the medium of near-Earth space to create efficient orbital transfer vehicles. These propulsion methods, characterized by their potential for high efficiency and the ability to operate over vast interstellar distances, represent the cutting edge of propulsion research. While the present study focuses on the optimization of chemical and electrical propulsion systems, including Nuclear Electric Propulsion (NEP), acknowledging these advanced propulsion concepts highlights the dynamic nature of propulsion research. As such, they serve as an inspiration for future work that may one day extend the practical reach of human-engineered spacecraft well beyond the confines of our solar system.
In the manuscript, we provide an optimization framework that strategically leverages the intricate trade-offs between chemical and electric systems for complex mission profiles. By incorporating a multi-faceted approach that considers the incremental effects of gravitational fields, atmospheric drag, and the added mass of dual propulsion systems, we offer a more granular and operationally relevant analysis than is commonly found in the literature. This study introduces a sophisticated model that is responsive to the dynamics of evolving space missions, particularly in the context of long-duration, multi-segment interorbital transfers. Through an algorithmic solution, we navigate the pathways of mission architecture to propose an optimized propellant distribution that aligns with the practical realities of spacecraft design, mission constraints, and emerging technological advancements.
3. Methodology
Delta-v (
), a critical parameter in space mission design, represents the change in velocity required for a spacecraft to perform specific maneuvers, such as orbit transfers [
31] or landings. The fundamental equation governing delta-v calculations derives from the TSIOLKOVSKI rocket equation, which relates the mass of the propellant (
), the initial and final mass of the spacecraft, and the effective exhaust velocity (
) of the propulsion system:
where:
, is the specific impulse of the propulsion system, and is the standard gravitational acceleration (9.81 m/s2).
is the initial mass (wet mass) of the spacecraft, including propellant.
is the final mass (dry mass) of the spacecraft, excluding propellant.
For HOHMANN transfer orbits, widely used for transfers between two circular orbits, the delta-v can be further specified by the semi-major axes of the initial and target orbits (
and
, respectively):
where
is the standard gravitational parameter of the central body.
While the TSIOLKOVSKI rocket equation provides a foundational basis for understanding the ideal delta-v in a vacuum, it inherently neglects the influence of external factors such as atmospheric drag and gravitational assists or perturbations that are common in near-Earth and interplanetary missions. To address this gap and align our model with real-world conditions, it is important to consider the modifications to delta-v due to these factors.
For atmospheric drag, the adjustment to delta-v, denoted by
, can be approximated for lower-Earth orbits or atmospheric entry maneuvers where the atmospheric density is non-negligible. The drag force is proportional to the square of the velocity (
), the atmospheric density (
), the spacecraft’s cross-sectional area (
A), and its drag coefficient (
), leading to an additional velocity change:
Gravitational influences, represented by
, incorporate the effects of gravitational assists and perturbations from celestial bodies. This component is especially relevant for missions utilizing gravity assists or encountering significant gravitational fields. The adjustment due to gravitational effects often requires numerical integration over the mission’s trajectory, factoring in the mass and relative positions of the celestial bodies encountered:
where
G is the gravitational constant,
M is the mass of the celestial body, and
r is the distance to the center of mass of the celestial body over the time interval from
to
.
Therefore, the actual delta-v required,
, considering these external influences, is given by:
This adjustment ensures a more accurate and comprehensive estimation of the propellant requirements for space missions, particularly those within near-Earth space or involving interplanetary transfers with gravitational assists.
That being said, for atmospheric drag, represented by
, we are proposing a simplified model assuming constant atmospheric density. Recognizing the significant impact of solar activity on atmospheric density, and consequently on drag effects, a more thorough approach would be to incorporate a dynamic model of atmospheric density. This model can factor in solar activity variations, allowing for a more precise calculation of drag effects on spacecraft velocity. Specifically, atmospheric density,
, can be treated as a function of solar activity,
, enabling the drag calculation to adapt to real-time space weather conditions:
Regarding gravitational influences, denoted by
, our initial representation employed a basic Newtonian gravity model. We can also enhance this model, by incorporating perturbative effects, such as the influence of other celestial bodies, solar radiation pressure, and the J2 effect (Earth’s oblateness). These perturbations significantly affect spacecraft trajectories, especially in long-duration or interplanetary missions. The gravitational influence model can integrate these perturbations to offer a comprehensive view of the forces acting on the spacecraft:
where “perturbations” can encompass the additional forces affecting the spacecraft, providing a more accurate depiction of the gravitational environment encountered during the mission.
3.1. Propulsion Systems’ Characteristics and Assumptions
For our analysis, two primary propulsion system types are considered: chemical and electric propulsion.
Chemical propulsion: Characterized by high thrust and lower specific impulse (), chemical systems are ideal for maneuvers requiring significant in short durations. We assume that bipropellant liquid engineshave a specific impulse range of 300–450 s.
Electric propulsion: Known for their high efficiency (high , typically 1000–3000 s) but lower thrust, electric propulsion systems are suited for gradual maneuvers over extended periods. The analysis incorporates ion thrusters, with the assumption that power availability does not limit their operation.
The propulsion system choice impacts the mission architecture significantly, influencing the spacecraft’s ability to carry out mission objectives within the constraints of time and mass.
3.2. Outline of the Optimization Algorithm for Propellant Distribution
The optimization of propellant distribution across different mission segments employs a constrained nonlinear programming approach, aiming to minimize the total mission propellant mass while satisfying the requirements for each segment.
Let the vector
represent the fraction of
for each mission segment
n performed using electric propulsion, with the remainder fulfilled by chemical propulsion. The objective function
to minimize is the total propellant mass,
, calculated as:
subject to the constraints:
and ensuring that the combined
from both propulsion systems meets the mission requirements for each segment.
The optimization employs the Sequential Quadratic Programming (SQP) method, advantageous for handling the nonlinear objective function and constraints. This method iteratively solves quadratic programming subproblems to converge towards the optimum propellant distribution.
By systematically adjusting the propellant distribution between propulsion types, we can achieve an efficient balance that leverages the high thrust of chemical propulsion for critical maneuvers and the high efficiency of electric propulsion for sustained thrust activities, thus minimizing the overall mission propellant mass while meeting all requirements.
This methodology, grounded in rigorous mathematical modeling and optimization techniques, provides a comprehensive framework for designing efficient propulsion strategies for complex space missions, paving the way for more sustainable and feasible exploration endeavors.
3.3. Modeling Low-Thrust Electric Propulsion Burns
The optimization of trajectories employing low-thrust electric propulsion necessitates a departure from the traditional HOHMANN transfer framework. Unlike impulsive burns that assume instantaneous changes in velocity, electric propulsion systems exert a continuous thrust that results in a gradual change in the spacecraft’s velocity over time. To accurately model this behavior, we can utilize numerical integration methods to calculate the spacecraft’s trajectory under the sustained influence of low-thrust propulsion. This requires the solution of the spacecraft’s equations of motion, taking into account the continuous thrust profile and the prolonged duration of burns. Such numerical methods enable the precise calculation of the cumulative required for mission segments, reflecting the actual performance characteristics of electric propulsion systems. The iterative process adjusts the propulsion distribution to minimize propellant consumption, ensuring that the spacecraft’s trajectory meets the designated mission objectives within the specified constraints.
The optimization model thus extends to accommodate both high-thrust impulsive maneuvers and low-thrust extended burns, providing a comprehensive framework that is applicable to a diverse array of propulsion systems and mission profiles.
The accurate modeling of low-thrust electric propulsion requires the integration of the spacecraft’s motion over time. Considering the thrust,
T, provided by the electric propulsion system, the spacecraft’s acceleration,
a, can be expressed by the second law of Newton as
, where
is the time-dependent mass of the spacecraft, decreasing due to propellant usage. The spacecraft’s position,
, and velocity,
, are then iteratively updated using the motion equations:
where
is a small time increment. The change in velocity,
, for each trajectory segment is then obtained by integrating the acceleration over the duration of the burn, from the initial time,
, to the final time,
:
This numerical integration takes into account the varying mass of the spacecraft, as well as the gravitational forces acting on it during the transfer, which can be significant for trajectories in the gravitational fields of celestial bodies or during maneuvers such as gravitational assists. The resulting trajectory provides a realistic approximation of the spacecraft’s path under continuous thrust, allowing for an optimized distribution that accounts for the unique characteristics of low-thrust propulsion systems.
Accounting for the Mass of Dual Propulsion Systems
Incorporating both chemical and electric propulsion systems onboard a spacecraft introduces additional mass due to the need for separate engines and fuel tanks. This dual-system approach results in a higher initial wet mass,
, which must be factored into the
calculations for accurate mission planning. The wet mass is given by:
where
is the dry mass of the spacecraft,
is the mass of the propellant,
is the mass of the chemical propulsion system including tanks and engines, and
is the mass of the electric propulsion system with its corresponding hardware. The presence of dual propulsion systems necessitates the recalculation of the spacecraft’s mass properties and
budget across all mission segments. The propellant mass for each segment must be optimized considering the added mass, ensuring the overall mission feasibility and efficiency:
where
and
are the initial and final wet mass for the segment, respectively, taking into account the consumption of propellant and the mass of the propulsion systems utilized.
4. Results
Understanding the robustness and adaptability of the propulsion optimization framework under various mission scenarios is crucial for its practical application. To this end, a sensitivity analysis was performed to evaluate how changes in key parameters such as specific impulse (), spacecraft mass, and delta-v requirements impact the total propellant mass required for a mission. This analysis aids in identifying which parameters have the most significant influence on propellant mass, thereby guiding the design and planning phases of space missions.
The sensitivity analysis explores three primary dimensions:
The impact of varying the specific impulse (), which is a measure of propulsion system efficiency.
The effect of changes in spacecraft mass, highlighting how increased mass demands more propellant for the same delta-v.
The influence of delta-v requirements on propellant mass, demonstrating the exponential increase in propellant needs for higher delta-v maneuvers.
As illustrated in
Figure 1, the total propellant mass required for a mission exhibits varying degrees of sensitivity to these parameters. The specific impulse (
) shows a pronounced impact, where higher
values lead to a substantial reduction in propellant mass, emphasizing the importance of selecting high-efficiency propulsion systems. Similarly, spacecraft mass and delta-v requirements are directly proportional to the propellant mass, highlighting the need for minimizing spacecraft mass and optimizing mission trajectories to reduce delta-v requirements.
This sensitivity analysis provides valuable insights into the propulsion optimization framework’s performance, illustrating its potential to significantly reduce mission costs and enhance mission feasibility through strategic planning and optimization.
4.1. Delta-v Requirements for Mission Segments
The mission under consideration involves several key segments, each with specific delta-v requirements calculated based on HOHMANN transfer equations and mission design parameters. The calculated delta-v values for the segments are as follows:
Delta-v from Low-Earth Orbit (LEO) to Geostationary Orbit (GEO):
Delta-v from LEO to Lunar orbit:
Delta-v from LEO to Earth–Moon Lagrange Point 1 (EML1):
4.2. Propellant Mass Calculations
Using the TSIOLKOVSKY rocket equation and considering the specific impulses of chemical and electric propulsion systems, we calculate the required propellant masses for each propulsion type across the mission segments.
For chemical propulsion (, ) and an initial spacecraft mass of , the propellant mass calculations yield:
For LEO-to-GEO transfer: Propellant mass required is approximately .
For LEO to lunar orbit transfer: The propellant mass required is approximately calculated based on the provided delta-v values.
For electric propulsion (), with the same initial mass, the delta-v provided for a given propellant mass of is , illustrating the higher efficiency but lower thrust characteristic of electric propulsion systems.
4.3. Optimization Model Results
The optimization model aiming to minimize the total propellant mass required for the mission, considering a mix of chemical and electric propulsion, produced the following results:
The optimized distribution of delta-v across propulsion types resulted in a total propellant mass of , indicating a significant reduction when compared to using a single propulsion type for all segments.
The distribution heavily favored electric propulsion for all segments (), underscoring its efficiency benefits for the mission profile considered.
4.4. Algorithm for Optimization
The optimization was carried out using a Sequential Quadratic Programming (SQP) method, which is well suited for the nonlinear nature of the problem. The algorithm can be briefly described as presented in Algorithm 1.
| Algorithm 1 Optimization of Propellant Distribution for Space Mission Segments |
- 1:
Define the objective function: Minimize total propellant mass . - 2:
Subject to: and delta-v constraints for each mission segment. - 3:
Initialize with an equal distribution of propulsion types. - 4:
while convergence criterion is not met do - 5:
Solve the quadratic programming subproblem to update . - 6:
Check constraints and adjust if necessary. - 7:
end while - 8:
return Optimized distribution and total propellant mass .
|
This algorithm facilitated an efficient exploration of the solution space, balancing the high thrust capabilities of chemical propulsion with the high efficiency of electric propulsion to achieve an optimal mission configuration.
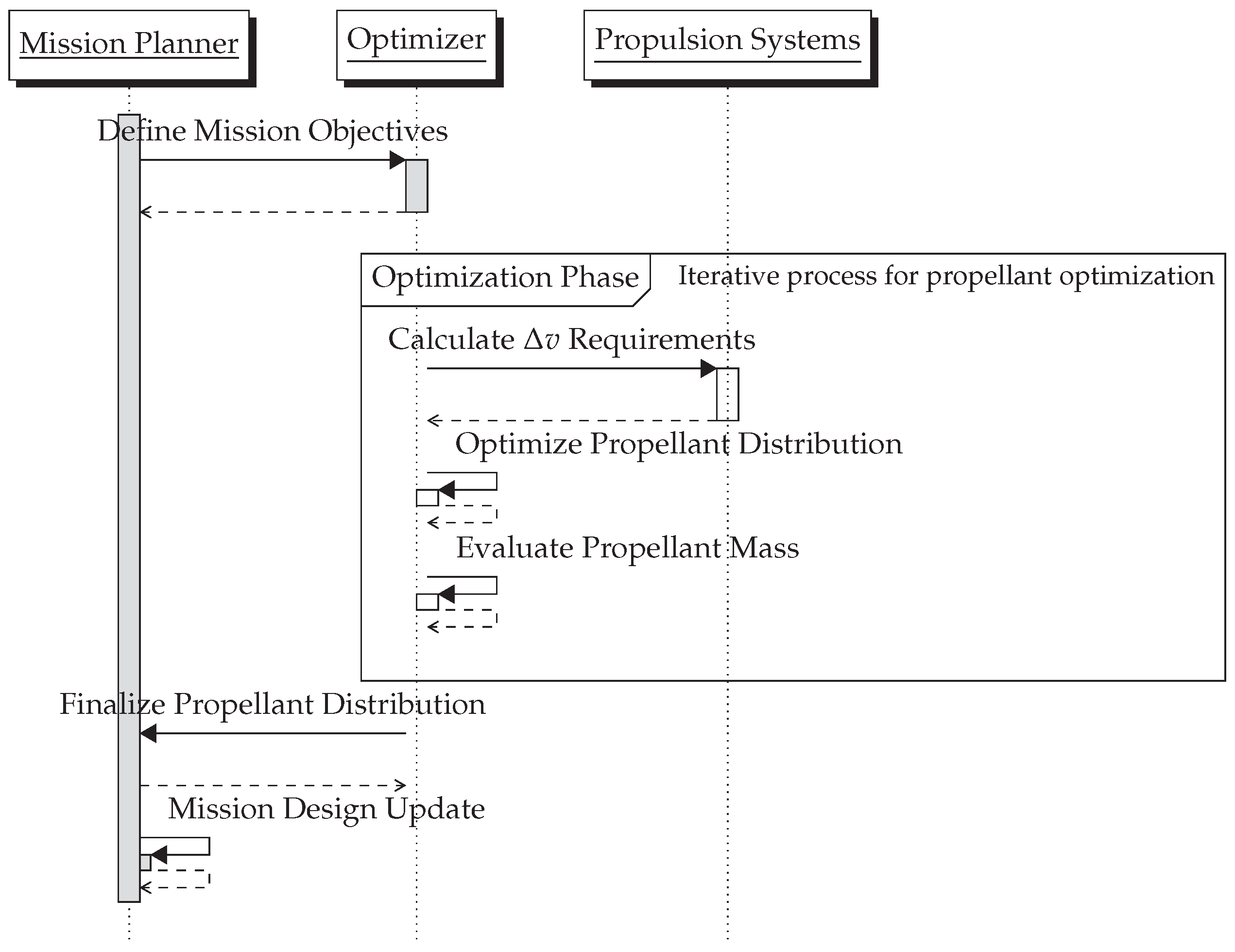
To sum up, in the complex and multifaceted process of planning space missions, a systematic approach to optimizing propellant distribution plays a key role in ensuring mission success while minimizing costs. The methodology adopted for this purpose involves a series of iterative steps, beginning with the definition of mission objectives and culminating in the finalization of propellant distribution strategies.
Figure 2 presents a sequence diagram that encapsulates the entire optimization process, highlighting the dynamic interactions between the mission planner, the optimization algorithm, and the propulsion systems. This visual representation aids in understanding the sequential flow of operations and decision-making processes that underpin the optimization of propellant distribution, a critical aspect of space mission planning. Through this methodology, the mission planner systematically navigates through the calculation of delta-v requirements, the optimization of propellant distribution, and the evaluation of propellant mass, thereby refining the mission design to achieve optimal efficiency and effectiveness.
The results underscore the critical importance of propulsion system selection and optimization in space mission design. By leveraging the complementary strengths of chemical and electric propulsion, significant efficiencies can be realized, reducing the overall mission propellant requirements. These findings have profound implications for mission planning and resource allocation, potentially enabling more ambitious missions within existing technological and budgetary constraints.
5. Discussion
This section delves into the implications of our findings from the propulsion system optimization model, particularly focusing on mission planning, propulsion system selection, and their broader impact on the future of lunar exploration.
5.1. Analysis of the Results
The optimization model’s results revealed a significant reduction in total propellant mass when employing a hybrid propulsion strategy, combining the high efficiency of electric propulsion with the high thrust capabilities of chemical propulsion. Specifically, the model suggested an optimal distribution of propulsion methods across different mission segments, minimizing the spacecraft’s overall propellant requirements while meeting all delta-v needs.
The delta-v requirements for mission segments, as calculated, underscore the varied demands of a lunar mission, from Earth departure to lunar orbit insertion and surface landing. Notably, the propellant mass calculations underscored electric propulsion’s role in enhancing mission efficiency, particularly for transit and orbital maneuvers, where its high specific impulse could be leveraged over extended periods.
5.2. Comparison with Traditional Methods
Traditionally, lunar missions have predominantly relied on chemical propulsion systems for their ability to provide immediate and substantial thrust. While effective for short-duration maneuvers and overcoming Earth’s gravitational pull, this approach often results in higher propellant mass requirements, directly influencing launch costs and mission feasibility.
The optimized hybrid propulsion approach, as suggested by our model, presents a compelling alternative. By integrating electric propulsion for specific mission segments, we can achieve considerable propellant mass savings. This hybrid strategy not only reduces the launch weight and associated costs but also opens up possibilities for more ambitious mission profiles, such as carrying additional scientific payloads or extending mission durations.
5.3. Implications for Future Lunar Exploration Missions
The implications of adopting a hybrid propulsion strategy extend beyond immediate cost and mass savings. They signal a shift towards more sustainable and versatile mission architectures, capable of supporting a broader range of objectives, from scientific exploration to human settlement.
Moreover, this approach aligns with NASA’s Artemis program [
32,
33] goals and the broader vision for sustainable lunar exploration and utilization. By optimizing propulsion strategies, we can enhance the logistics of lunar surface access, resource utilization, and the establishment of permanent lunar bases.
Additionally, the findings underscore the importance of continued investment in propulsion technology research, particularly in electric propulsion systems. Advancements in this area could further increase the feasibility of not only lunar missions but also deep-space exploration endeavors.
In conclusion, the optimization model’s results advocate for a sophisticated approach to propulsion system selection, tailored to the specific phases and requirements of lunar missions. As we stand on the cusp of a new era in lunar exploration, such strategic considerations will be crucial in realizing our ambitions for the Moon and beyond, ensuring that humanity’s return to the lunar surface is not just a momentary feat but the foundation for a sustained presence and a stepping stone to the broader solar system.
5.4. AI and ML Techniques in Propulsion Optimization
With advancements in Artificial Intelligence (AI) and Machine Learning (ML) [
34], there is also an unprecedented opportunity to enhance the optimization of propulsion systems for space missions, and further conceptualize the proposed framework. These technologies can be leveraged to dynamically adjust propulsion strategies in response to real-time data and evolving mission conditions, thereby improving the efficiency and mission adaptability.
AI and ML algorithms, such as Reinforcement Learning, genetic algorithms, and Neural Networks, can be employed to model and predict the performance of propulsion systems under a wide range of conditions. In particular, techniques like Physics-Informed Neural Networks (PINN) [
35] can play an important role in a wide variety of problems, where learning parameters while adhering to known physical phenomena is crucial. These algorithms can analyze vast datasets, including telemetry data, environmental conditions, and propulsion system performance metrics, to dynamically identify patterns and optimize propulsion strategies.
Possible application in Mission Planning and Execution:
Real-time mission adaptation: AI models can process real-time data from spacecraft sensors to adjust propulsion strategies, optimizing fuel consumption and adapting to unforeseen challenges such as changes in mission objectives or unexpected space weather conditions.
Predictive maintenance: By continuously monitoring the health and performance of propulsion systems, AI can predict potential failures or maintenance needs, allowing for proactive measures that prevent mission-critical issues.
Efficiency optimization: ML algorithms can optimize the trade-off between thrust and specific impulse for electric and chemical propulsion systems, dynamically adjusting to ensure the most efficient use of propellant throughout the mission.
While the integration of AI and ML presents significant opportunities for enhancing propulsion optimization, it also introduces challenges such as ensuring the reliability of AI decisions, dealing with limited data for rare or unprecedented mission scenarios, and integrating AI systems with existing spacecraft hardware and software. Addressing these challenges will require interdisciplinary collaboration, rigorous testing, and the continuous refinement of AI models.
6. Evaluation
In this section, we evaluate the proposed optimization framework by simulating missions to Mars and Venus. These simulations demonstrate the effectiveness of our methodology in optimizing propellant mass across different mission segments using a hybrid approach that combines chemical and electric propulsion systems. The emphasis is on showcasing how the framework can adapt to different mission profiles, yielding significant reductions in propellant mass requirements.
The simulations were designed to calculate the optimal propellant distribution for missions to Mars and Venus. Each mission was divided into three key segments: Earth Departure, Interplanetary Transfer, and Orbit Insertion. The optimization focused on minimizing the total propellant mass while fully utilizing the efficiency of electric propulsion, as indicated by an electric fraction of 1.00 across all segments.
The results of the simulations are summarized in
Table 1 and
Table 2, which present the total propellant mass required for each mission, alongside the breakdown of propellant mass for each mission segment.
The simulations reveal that the optimization framework is highly effective in minimizing the total propellant mass required for interplanetary missions. By leveraging electric propulsion’s high specific impulse, the framework ensures that the entirety of the delta-v requirements for each mission segment can be met efficiently. The significant reduction in propellant mass compared to traditional methods highlights the potential for substantial cost savings and the feasibility of more ambitious mission profiles.
6.1. Adapting to Realistic Mission Constraints
To better align with realistic mission scenarios, where certain maneuvers necessitate the use of chemical propulsion due to its high thrust capabilities, the optimization framework was refined. This adaptation was crucial for simulating mission segments that require immediate and substantial delta-v changes, such as critical orbit adjustments or planetary landings, which cannot be efficiently achieved with electric propulsion alone.
The optimization model was adjusted to enforce the utilization of chemical propulsion in at least one critical mission segment, thereby simulating a more realistic application of propulsion systems. The specific changes to the framework included:
The introduction of a constraint to ensure that chemical propulsion is used for the critical maneuver, reflecting the necessity for high thrust output.
The modification of the objective function to calculate the total propellant mass, taking into account the propulsion type used for each mission segment based on the fraction of delta-v provided by electric propulsion.
Algorithm 2 outlines the pseudocode for this enhanced approach, highlighting the systematic process of determining the optimal distribution of propellant types across mission segments.
| Algorithm 2 Optimized Propellant Distribution for Space Missions with Realistic Constraints |
- 1:
Identify the index of the critical maneuver within the mission segments. - 2:
Define the objective function to minimize the total propellant mass: - 3:
Initialize total mass to zero. - 4:
for each mission segment and its delta-v requirement do - 5:
Calculate the mass using electric propulsion if the segment’s fraction is less than 1. - 6:
Otherwise, calculate using chemical propulsion. - 7:
Accumulate the calculated mass to the total mass. - 8:
end for - 9:
Return the total mass. - 10:
Define the constraint for the critical maneuver to enforce chemical propulsion usage: - 11:
The fraction for the critical maneuver must be less than 0.9 (at least 10% chemical). - 12:
Set bounds for the propulsion fraction between 0 and 1 for each segment. - 13:
Use a nonlinear optimization method to minimize the objective function, subject to the defined constraint and bounds. - 14:
Return the optimized propulsion distribution and the corresponding total propellant mass.
|
The refined optimization model was applied to simulate a mission incorporating the realistic constraint of chemical propulsion usage for critical maneuvers. The results are shown in
Table 3.
These results demonstrate the framework’s capability to adapt to mission-specific constraints, providing an optimal blend of chemical and electric propulsion to meet the delta-v requirements efficiently. The inclusion of a segment mandating chemical propulsion usage highlights the model’s flexibility in addressing real-world mission planning challenges.
The adaptation of the optimization framework to enforce the use of chemical propulsion in critical mission segments offers a more nuanced approach to mission planning. By accommodating the distinct advantages of both propulsion types, the framework ensures mission feasibility while optimizing for efficiency and cost-effectiveness. This methodology exemplifies the intricate balance required in planning space missions, underscoring the importance of a flexible and adaptive optimization strategy.
6.2. Extended Simulation Experiments
To enhance the realism and applicability of our propulsion optimization framework, we undertook two additional sets of experiments. These experiments aimed to incorporate the more nuanced aspects of space mission planning, including variable propulsion efficiencies and the impact of environmental and orbital dynamics.
6.2.1. Experiment 1: Variable Propulsion Efficiencies
The first experiment aimed to model the effect of variable propulsion efficiencies over the course of a mission. This involved adjusting the specific impulse () for both chemical and electric propulsion systems based on operational conditions, such as propellant consumption for chemical propulsion and power availability for electric propulsion.
Methodology
For chemical propulsion, we assumed a slight decrease in efficiency as propellant is consumed, by reducing the
by 2%. For electric propulsion, we introduced variability in efficiency due to fluctuations in power availability, modeled as a uniform distribution between 95% and 105% of the nominal
. The pseudocode is described in Algorithm 3.
| Algorithm 3 Incorporating Variable Propulsion Efficiencies |
- 1:
Define the initial spacecraft mass and propulsion system parameters. - 2:
Adjust for chemical propulsion based on propellant consumption. - 3:
Introduce variability in for electric propulsion based on power availability. - 4:
for each mission segment do - 5:
Calculate delta-v requirements for the segment. - 6:
Use adjusted to calculate the propellant mass for both propulsion types. - 7:
Optimize the propulsion distribution to minimize total propellant mass. - 8:
Accumulate the propellant mass required for the mission. - 9:
end for - 10:
Report the optimized total propellant mass and propulsion distribution.
|
Results
The simulation results indicated a significant impact on the total propellant mass required for missions to Mars and Venus:
Mission to Mars: The total propellant mass increased to 122,931.92 kg, with the Earth Departure segment requiring 58,550.95 kg, the Interplanetary Transfer requiring 37,792.63 kg, and the Orbit Insertion requiring 26,588.33 kg.
Mission to Venus: The total propellant mass was 110,403.20 kg, with the Earth Departure segment at 50,269.21 kg, Interplanetary Transfer 41,576.49 kg, and Orbit Insertion 18,557.50 kg.
These results underscore the importance of accounting for variable propulsion efficiencies in mission planning, as they can significantly affect the propellant mass requirements.
6.2.2. Experiment 2: Accounting for Environmental and Orbital Dynamics
The second set of experiments focused on incorporating the effects of environmental and orbital dynamics, specifically the uncertainties in achieving precise gravitational assists and dealing with orbital perturbations.
Methodology
We expanded the Monte Carlo simulation to include variations in the delta-v requirements for interplanetary transfer segments, simulating the uncertainties in gravitational assists and orbital dynamics. This was achieved by introducing a variability factor that adjusted the nominal delta-v requirements by ±10%. The pseudocode is described in Algorithm 4.
| Algorithm 4 Simulation with Environmental and Orbital Dynamics |
- 1:
Define mission profiles with nominal delta-v requirements. - 2:
Incorporate variations in delta-v for interplanetary transfers to simulate gravitational assists and orbital dynamics. - 3:
for each iteration of the Monte Carlo simulation do - 4:
Adjust delta-v requirements for interplanetary transfer based on simulated variability. - 5:
Recalculate propellant mass requirements using the adjusted delta-v. - 6:
Optimize the propulsion distribution for the new conditions. - 7:
end for - 8:
Aggregate the results from all Monte Carlo iterations. - 9:
Determine the average and variability of the total propellant mass required. - 10:
Report the optimized propulsion distribution and impact of environmental dynamics on propellant mass.
|
Results
The incorporation of environmental and orbital dynamics into the simulation further adjusted the propellant mass requirements:
For the mission to Mars, the total propellant mass required was observed to vary significantly across the Monte Carlo simulations, reflecting the impact of orbital dynamics on mission planning.
Similarly, the mission to Venus showed a notable increase in variability of the total propellant mass, underscoring the challenges in planning missions with precise gravitational assists.
These extended simulation experiments highlight the complex interplay between propulsion system characteristics, spacecraft operational conditions, and environmental dynamics in determining the optimal propellant distribution for space missions. The findings emphasize the need for flexible and robust optimization frameworks that can adapt to a wide range of uncertainties and operational constraints.
By incorporating variable propulsion efficiencies and accounting for environmental and orbital dynamics, we can achieve a more fundamental understanding of propellant mass requirements, thereby enhancing the reliability and feasibility of future space missions.
In summary, our optimization framework employs a hybrid approach, integrating both chemical and electric propulsion systems to minimize the overall propellant mass required for interorbital transfers. The optimization algorithm dynamically determines the optimal distribution of propulsion types across different mission segments by balancing the high thrust capability of chemical propulsion with the high efficiency of electric propulsion. This involves calculating the propellant mass required for each segment and adjusting the propulsion distribution to achieve the lowest total propellant mass, while meeting the delta-v requirements for the mission.
Although our study provides a detailed mathematical framework for this optimization process, we acknowledge the importance of visualizing achieved trajectories to fully understand how the optimization operates in practice. Presently, our analysis focuses on the optimization algorithm and its outcomes without delving into trajectory visualization. Future work could include replicating the optimized mission sequences in advanced aerospace simulation tools such as GMAT (General Mission Analysis Tool) or STK (Systems ToolKit). These simulations would offer a visual representation of where chemical and electric propulsion burns are utilized within a mission, enhancing our understanding of the optimization’s practical application. While the incorporation of such simulations is beyond the scope of this current study, we recognize their value in providing comprehensive insights into mission planning and optimization.
6.3. Transitioning towards High-Fidelity Simulations with GMAT
While the mathematical framework presented in this study serves as a valuable tool for early mission analysis and propellant optimization, it inherently simplifies various complex aspects inherent to space missions. Recognizing these limitations, the path forward in a real mission would be to extended analysis within a framework such as the General Mission Analysis Tool (GMAT) environment. This transition would aim to encapsulate a more comprehensive array of mission dynamics and environmental factors, offering deeper insights into the practical implementation of the mission plans.
GMAT, with its robust simulation capabilities, allows for the detailed modeling of spacecraft trajectories, incorporating gravitational assists, atmospheric drag variations, and the complex gravitational fields of multiple celestial bodies. Such a high-fidelity simulation environment is crucial for validating the initial findings derived from a mathematical optimization framework, ensuring their applicability in real-world mission scenarios. Algorithm 5 illustrates the procedure.
| Algorithm 5 Implementation Approach in GMAT for Spacecraft Trajectory Optimization |
- 1:
Define the spacecraft and its initial conditions including mass and aerodynamic properties. - 2:
Setup the environmental model including gravitational bodies, atmospheric models, and solar radiation pressure. - 3:
Configure the force model to include relevant forces acting on the spacecraft: gravitational forces from Earth, the Moon, and the Sun; solar radiation pressure; and atmospheric drag. - 4:
Establish the propulsion system models for both chemical and electric thrusters, specifying characteristics such as specific impulse and thrust levels. - 5:
Design the mission sequence, detailing each maneuver and its intended propulsion method (chemical or electric). - 6:
Implement impulsive burns and low-thrust arcs, setting initial guesses for maneuver magnitudes and directions. - 7:
Use GMAT’s optimization tools to refine the mission plan: Specify the optimization objective (e.g., minimize total propellant mass or mission duration). Define constraints (e.g., maximum allowable thrust or specific impulse values). Initiate the optimization process to iteratively adjust maneuver parameters.
- 8:
Analyze the optimized trajectory, examining how chemical and electric burns are integrated and the resulting spacecraft path. - 9:
Validate the results through comparison with known mission profiles or theoretical expectations. - 10:
Document the setup, optimization process, and outcomes for reference in mission planning and further studies.
|
It is imperative to highlight that this approach, while significantly more detailed, still represents a simulation. Real mission design involves iterative refinements based on simulation results, experimental data, and evolving mission objectives. GMAT simulations offer a platform for such refinements, providing a realistic approximation of spacecraft behavior under a myriad of mission-specific conditions.
Although the implementation of this proposed framework in GMAT is beyond the scope of our current study, it represents a crucial step for future research. Establishing a comprehensive GMAT or STK simulation based on the initial optimization findings will bridge the gap between theoretical analysis and practical mission design.








{kind=link}
{kind=link}