
Robust Control for Underactuated Fixed-Wing Unmanned Aerial Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Firstly, the proposed NDSC overcomes the singularity problem by employing a nonsingular hypersurface to replace the original linear error term. Then, finite time convergence theory is adopted to derive the control law, ensuring the system state converges to the origin in finite time.
- (2)
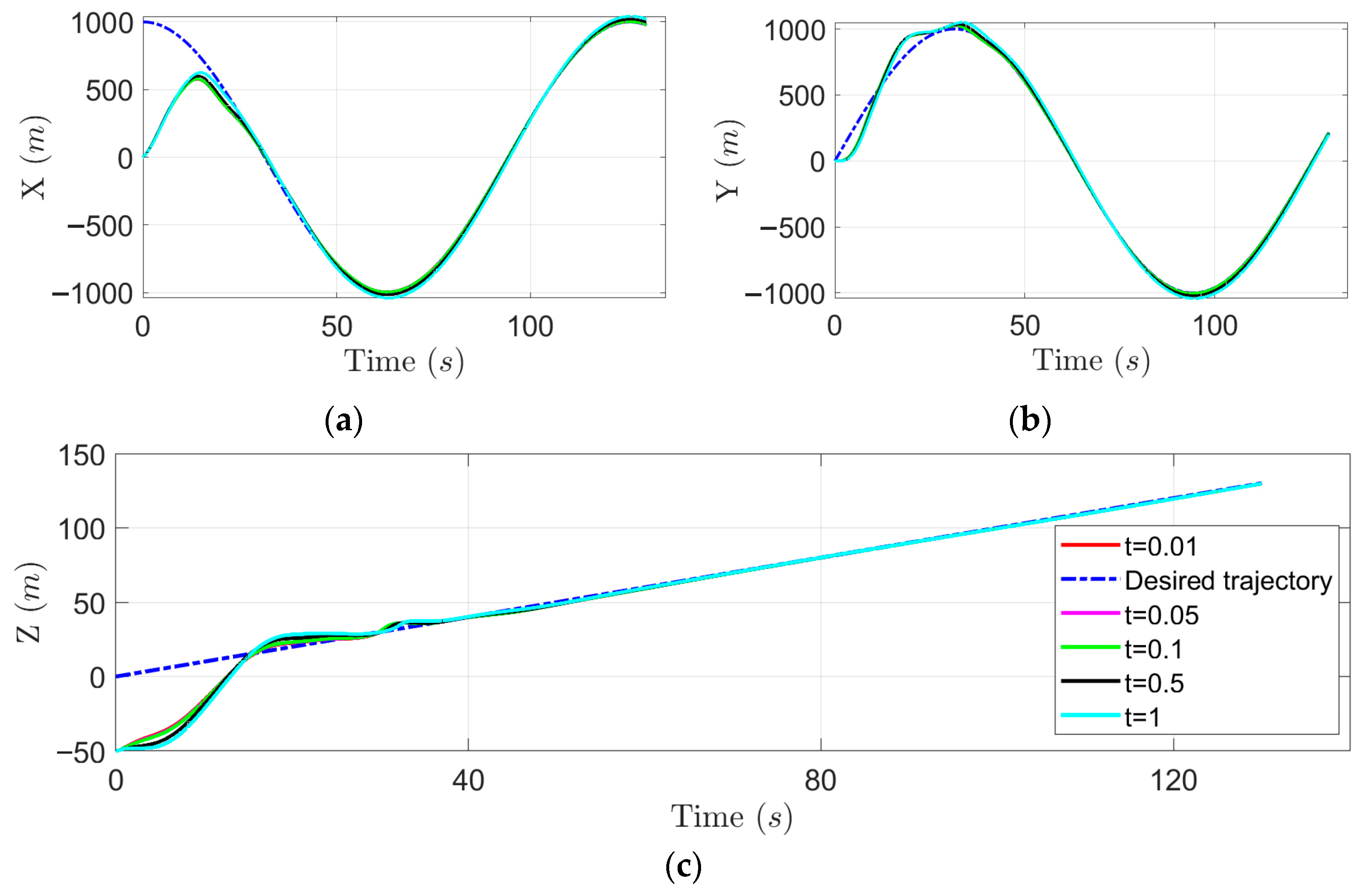
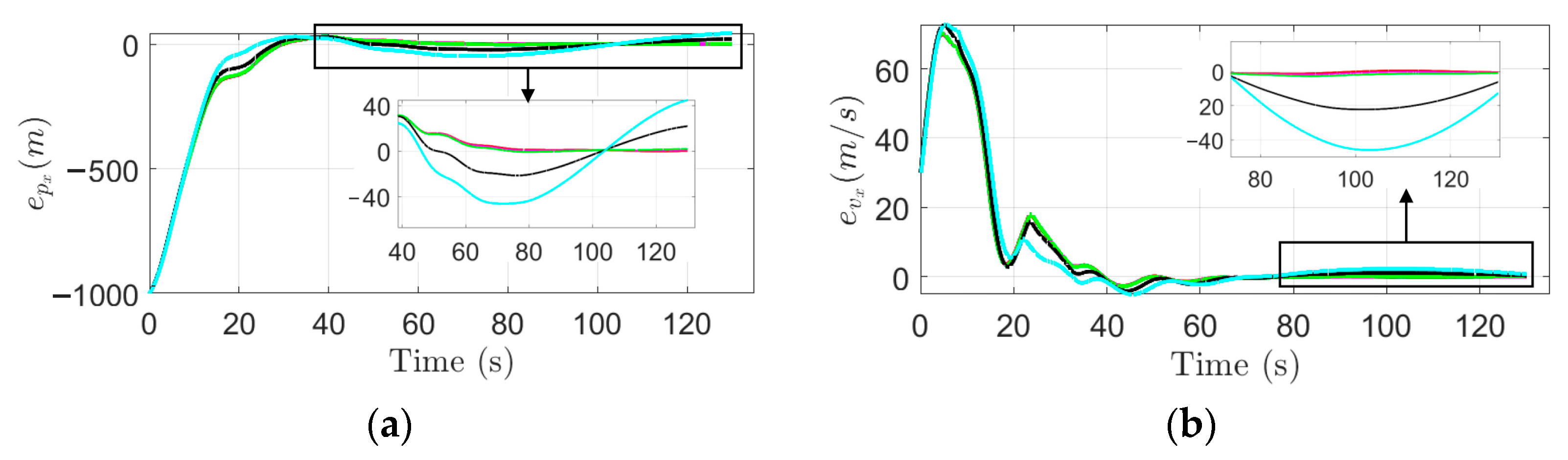
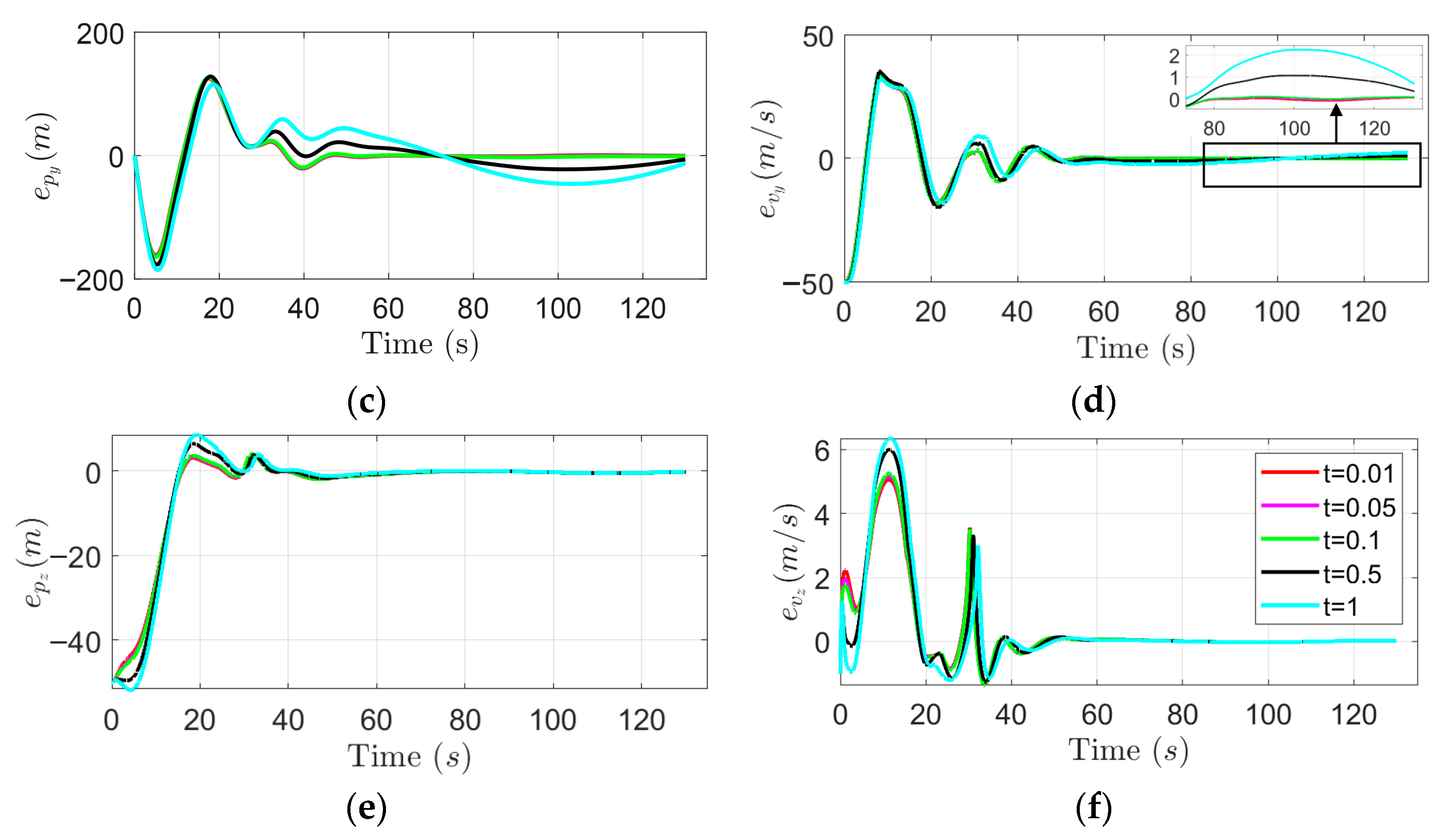
- When the FOF tracking error is limited, we prove the global stability of the proposed NDSC method. Based on such analysis, we find NDSC is insensitive to the variation in the time constant τ. This enables a great deal of flexibility in choosing parameters.
- (3)
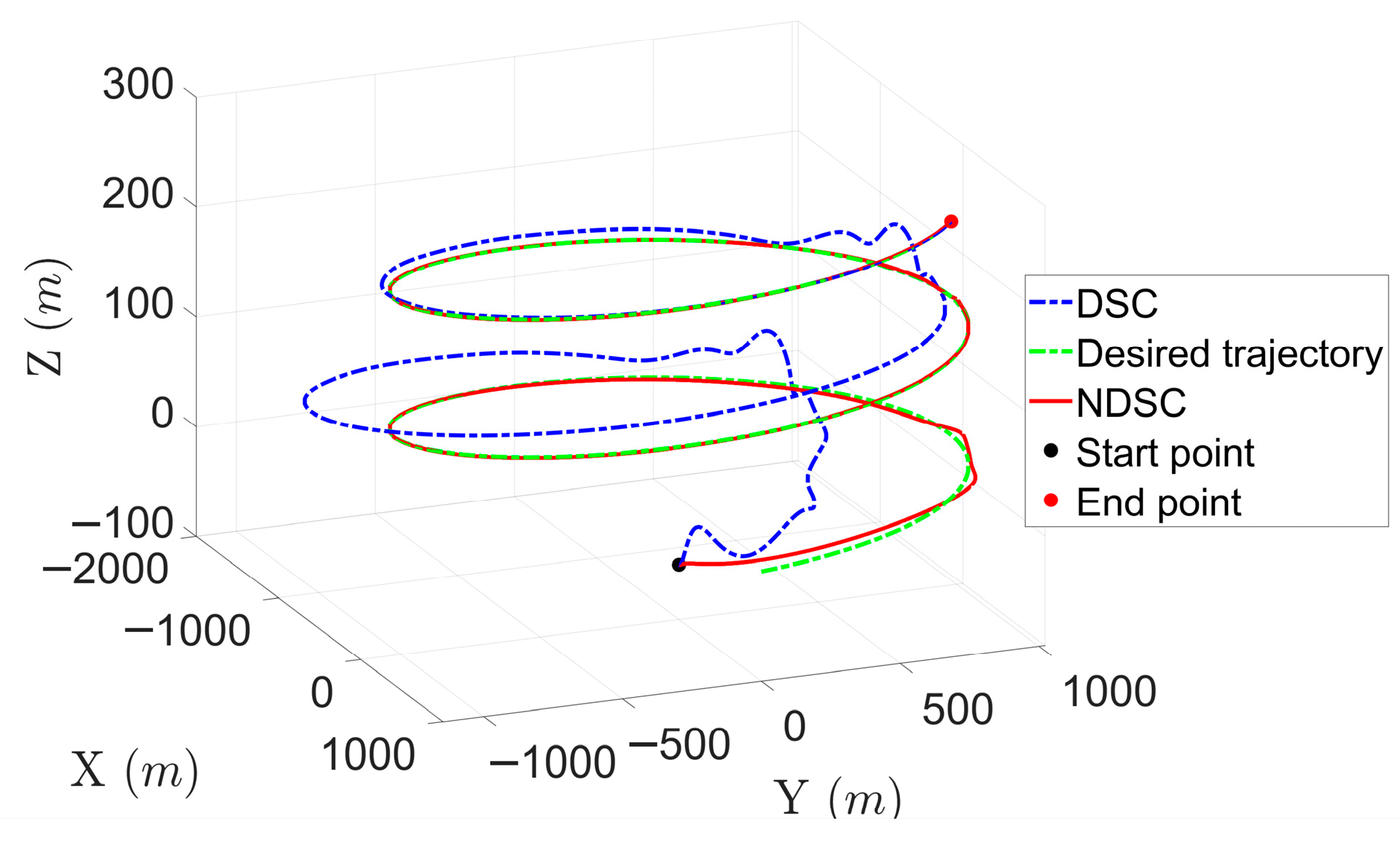
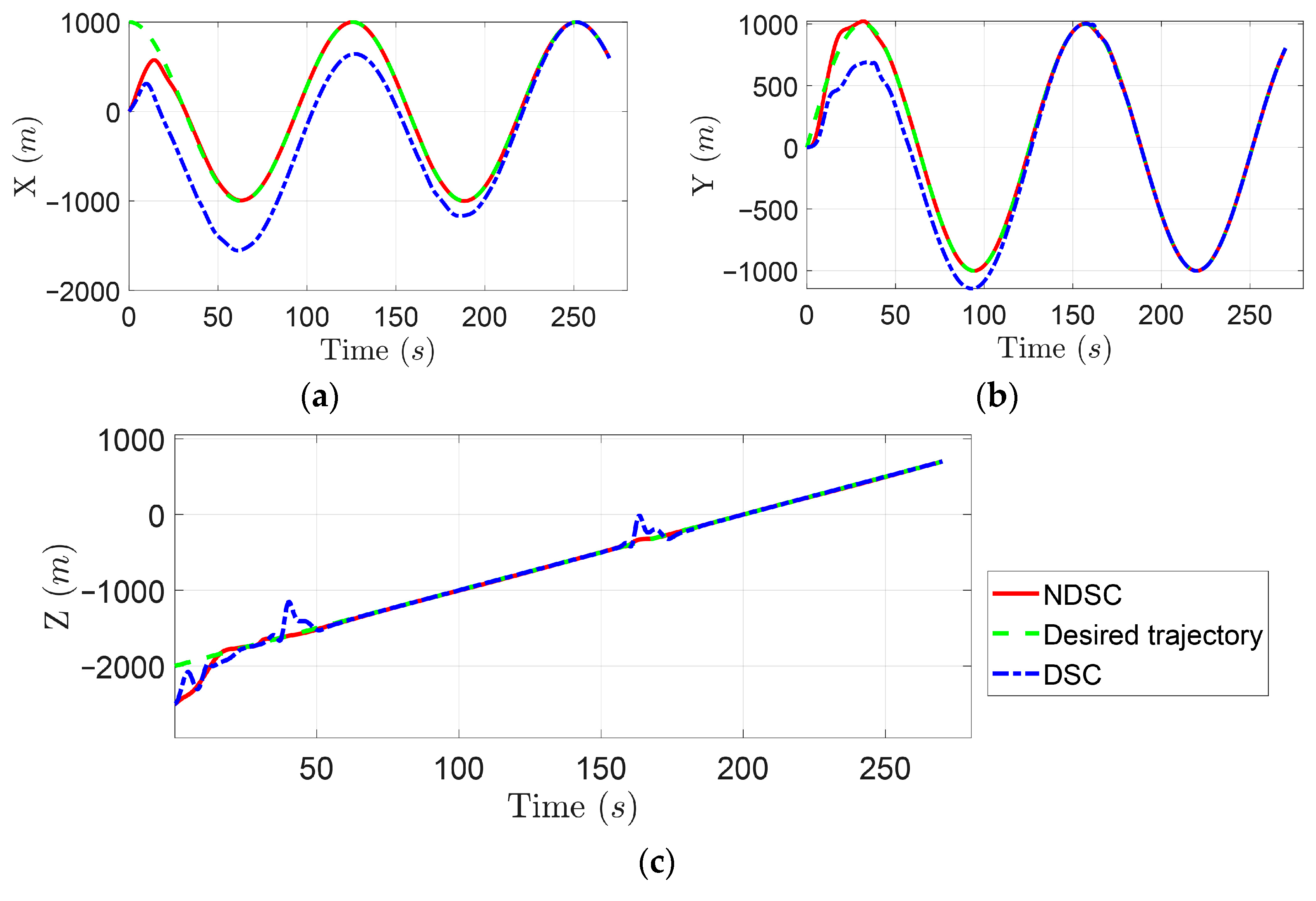
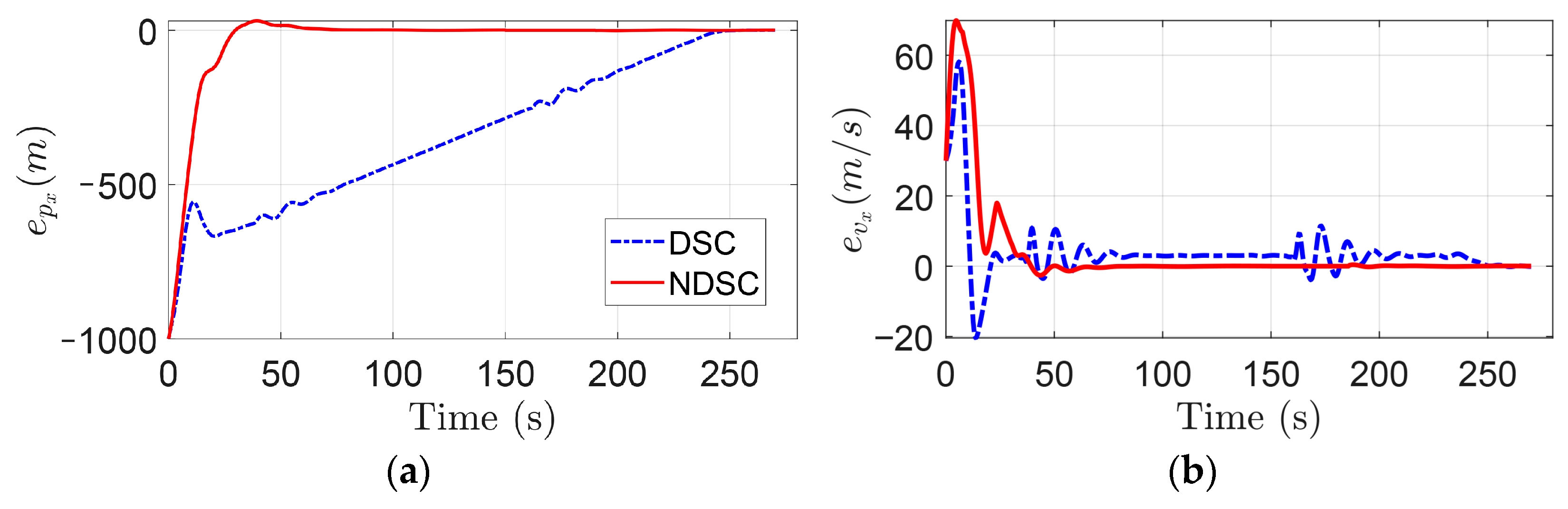
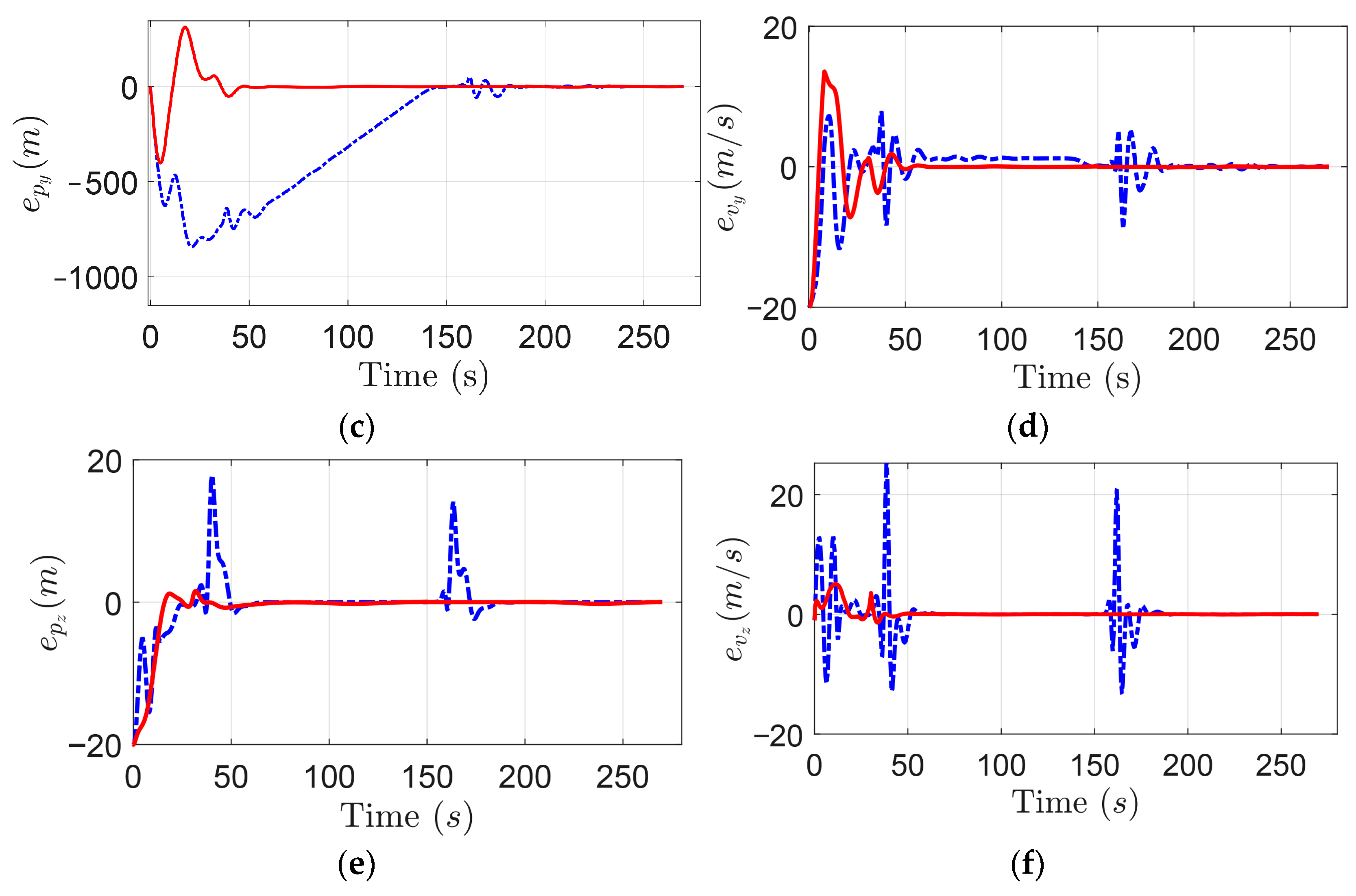
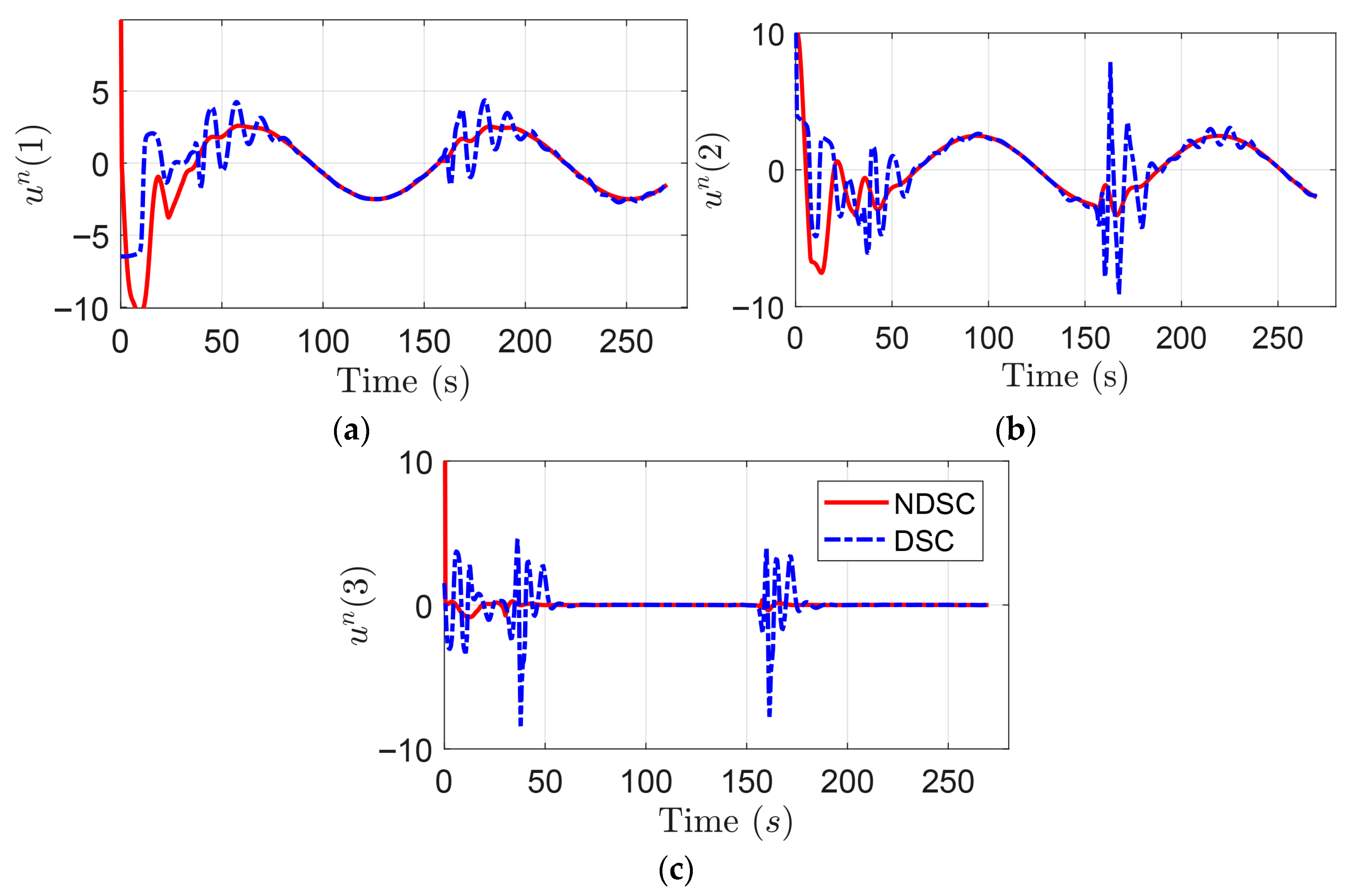
- We thoroughly evaluate the proposed NDSC method in an underactuated UAV control task. In particular, the NDSC has been shown to be superior to the standard DSC approach in terms of convergence rate, robustness, and trajectory tracking accuracy.
2. Problem Statement
2.1. UAV Dynamics
2.2. Control Objective
3. Nonsingular Dynamic Surface
4. An Illustrative Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Deng, C.; Che, W.-W.; An, L. Adaptive backstepping control for nonlinear interconnected systems with prespecified-performance-driven output triggering. Automatica 2023, 154, 111063. [Google Scholar] [CrossRef]
- Taylor, A.J.; Ong, P.; Molnar, T.G.; Ames, A.D. Safe backstepping with control barrier functions. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022; pp. 5775–5782. [Google Scholar]
- Swaroop, D.; Hedrick, J.; Yip, P.; Gerdes, J. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Pan, Y.; Yu, H. Dynamic surface control via singular perturbation analysis. Automatica 2015, 57, 29–33. [Google Scholar] [CrossRef]
- Shen, G.; Huang, P.; Zhang, F.; Ma, Z.; Xia, Y. Adaptive fixedtime control for the postcapture tethered spacecraft with full-state constraints. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 2702–2712. [Google Scholar] [CrossRef]
- Wang, J.; Alattas, K.A.; Bouteraa, Y.; Mofid, O.; Mobayen, S. Adaptive finite-time backstepping control tracker for quadrotor uav with model uncertainty and external disturbance. Aerosp. Sci. Technol. 2023, 133, 108088. [Google Scholar] [CrossRef]
- Lyu, Y.; Cao, Y.; Zhang, W.; Shi, J.; Qu, X. Dynamic surface control design of post-stall maneuver under unsteady aerodynamics. Aerosp. Sci. Technol. 2018, 80, 269–280. [Google Scholar] [CrossRef]
- Shao, X.; Wang, L.; Li, J.; Liu, J. High-order eso based output feedback dynamic surface control for quadrotors under position constraints and uncertainties. Aerosp. Sci. Technol. 2019, 89, 288–298. [Google Scholar] [CrossRef]
- Shen, Z.; Li, F.; Cao, X.; Guo, C. Prescribed performance dynamic surface control for trajectory tracking of quadrotor uav with uncertainties and input constraints. Int. J. Control 2021, 94, 2945–2955. [Google Scholar] [CrossRef]
- Wang, G.; Yang, W.X.; Zhao, N. An approximation-free simple controller for uncertain quadrotor systems in the presence of thrust saturation. Mechatronics 2020, 72, 102451. [Google Scholar] [CrossRef]
- Dai, P.; Feng, D.; Zhao, J.; Cui, J.; Wang, C. Asymmetric integral barrier lyapunov function-based dynamic surface control of a state-constrained morphing waverider with anti-saturation compensator. Aerosp. Sci. Technol. 2022, 131, 107975. [Google Scholar] [CrossRef]
- Xingling, S.; Biao, T.; Wei, Y.; Wendong, Z. Estimator-based mlp neuroadaptive dynamic surface containment control with prescribed performance for multiple quadrotors. Aerosp. Sci. Technol. 2020, 97, 105620. [Google Scholar] [CrossRef]
- Ma, Q.; Xu, X.; Zhang, R.; Xiong, Q.; Zhang, X.; Zhang, X. Robust consensus control of nonlinear multi-agent systems based on convergence rate estimation. Int. J. Robust Nonlinear Control 2023, 33, 2003–2021. [Google Scholar] [CrossRef]
- Wang, G.; Yang, W.X.; Zhao, N. Distributed Consensus Control of Multiple UAVs in a Constrained Environment. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3234–3240. [Google Scholar]
- Cao, L.; Pan, Y.; Liang, H.; Huang, T. Observer-based dynamic event-triggered control for multiagent systems with time-varying delay. IEEE Trans. Cybern. 2023, 53, 3376–3387. [Google Scholar] [CrossRef]
- Bu, X.; Wu, X.; Zhang, R.; Ma, Z.; Huang, J. Tracking differentiator design for the robust backstepping control of a flexible air-breathing hypersonic vehicle. J. Frankl. Inst. 2015, 352, 1739–1765. [Google Scholar] [CrossRef]
- Shao, X.; Liu, J.; Wang, H. Robust back-stepping output feedback trajectory tracking for quadrotors via extended state observer and sigmoid tracking differentiator. Mech. Syst. Signal Process. 2018, 104, 631–647. [Google Scholar] [CrossRef]
- Liu, G.; Li, B.; Duan, G. An optimal fasa approach for uav trajectory tracking control. Guid. Navig. Control 2023, 3, 2350015. [Google Scholar] [CrossRef]
- Gu, X.; Xian, B.; Wang, Y. Geometry-based adaptive tracking control for an underactuated small-size unmanned helicopter. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 7489–7500. [Google Scholar] [CrossRef]
- Roggi, G.; Gozzini, G.; Invernizzi, D.; Lovera, M. Vision-based air-to-air autonomous landing of underactuated vtol uavs. IEEE/ASME Trans. Mechatron. 2023. [Google Scholar] [CrossRef]
- Liu, X.; Hu, P.; Chen, Y. Adaptive hierarchical sliding mode control based on extended state observer for underactuated robotic system. In International Journal of Control, Automation and Systems; Springer: Berlin/Heidelberg, Germany, 2024; pp. 1–14. [Google Scholar]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Kiran, B.R.; Sobh, I.; Talpaert, V.; Mannion, P.; Al Sallab, A.A.; Yogamani, S.; P´erez, P. Deep reinforcement learning for autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4909–4926. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Zhang, L.; Chen, Z. Robust Control for Underactuated Fixed-Wing Unmanned Aerial Vehicles. Mathematics 2024, 12, 1118. https://doi.org/10.3390/math12071118
Wang T, Zhang L, Chen Z. Robust Control for Underactuated Fixed-Wing Unmanned Aerial Vehicles. Mathematics. 2024; 12(7):1118. https://doi.org/10.3390/math12071118
Chicago/Turabian StyleWang, Tianyi, Luxin Zhang, and Zhihua Chen. 2024. "Robust Control for Underactuated Fixed-Wing Unmanned Aerial Vehicles" Mathematics 12, no. 7: 1118. https://doi.org/10.3390/math12071118
APA StyleWang, T., Zhang, L., & Chen, Z. (2024). Robust Control for Underactuated Fixed-Wing Unmanned Aerial Vehicles. Mathematics, 12(7), 1118. https://doi.org/10.3390/math12071118