
Temporal High-Order Accurate Numerical Scheme for the Landau–Lifshitz–Gilbert Equation


Abstract
:1. Introduction
2. The Physical Model and Numerical Method
2.1. Landau–Lifshitz–Gilbert Equation
2.2. Numerical Method Based on Gauss–Legendre Quadrature
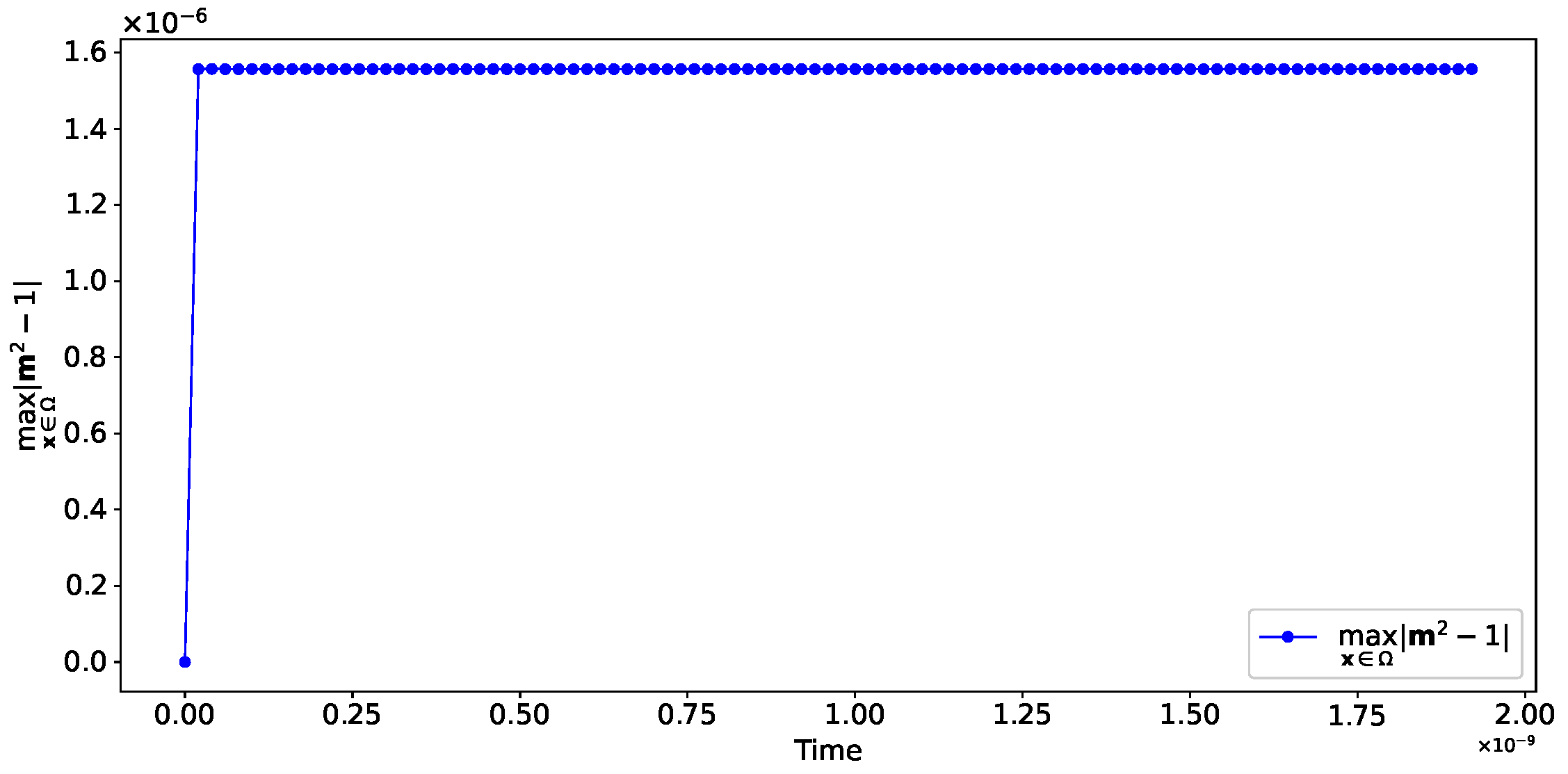
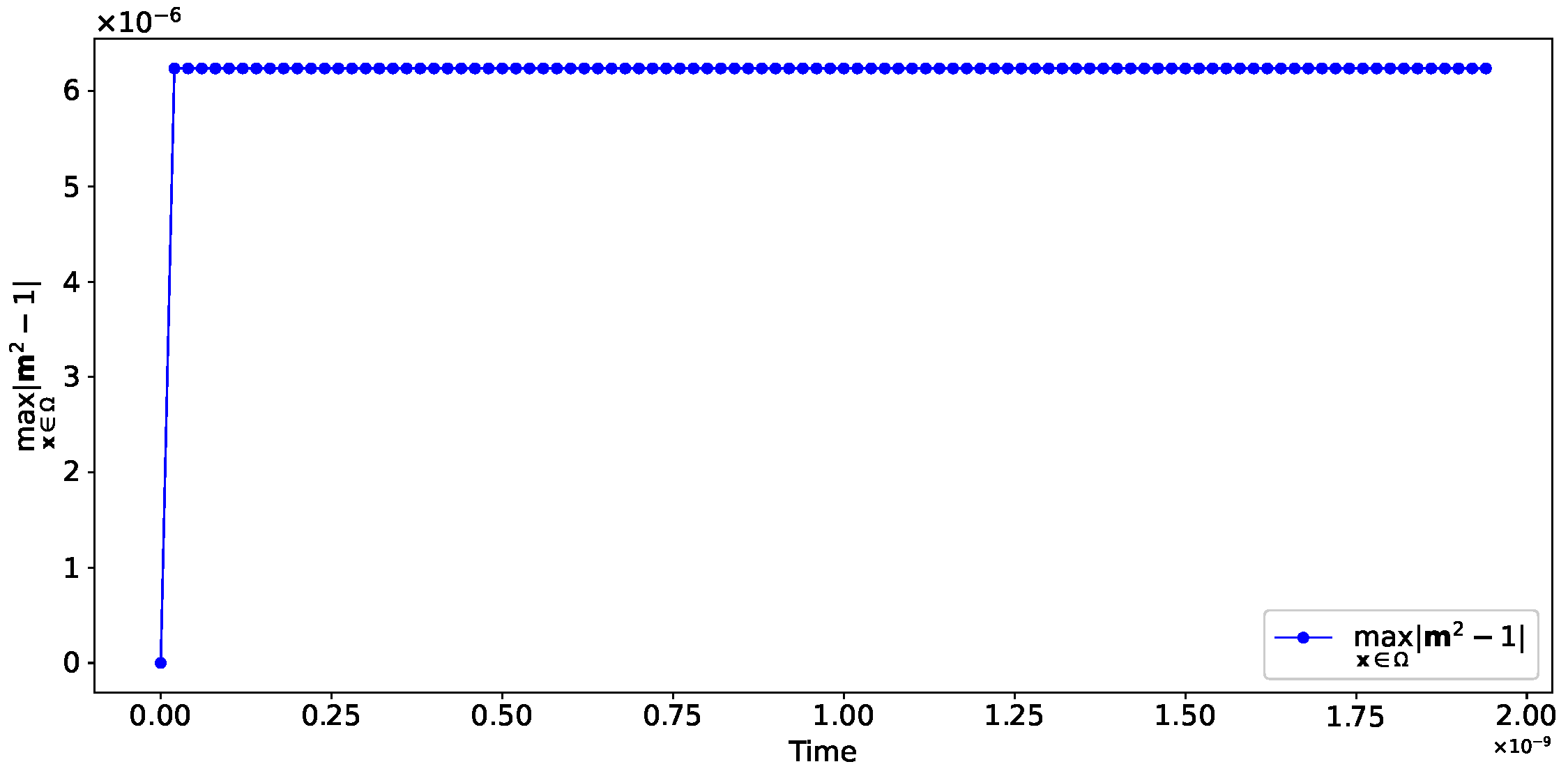
3. Preservation of Magnetization Magnitude
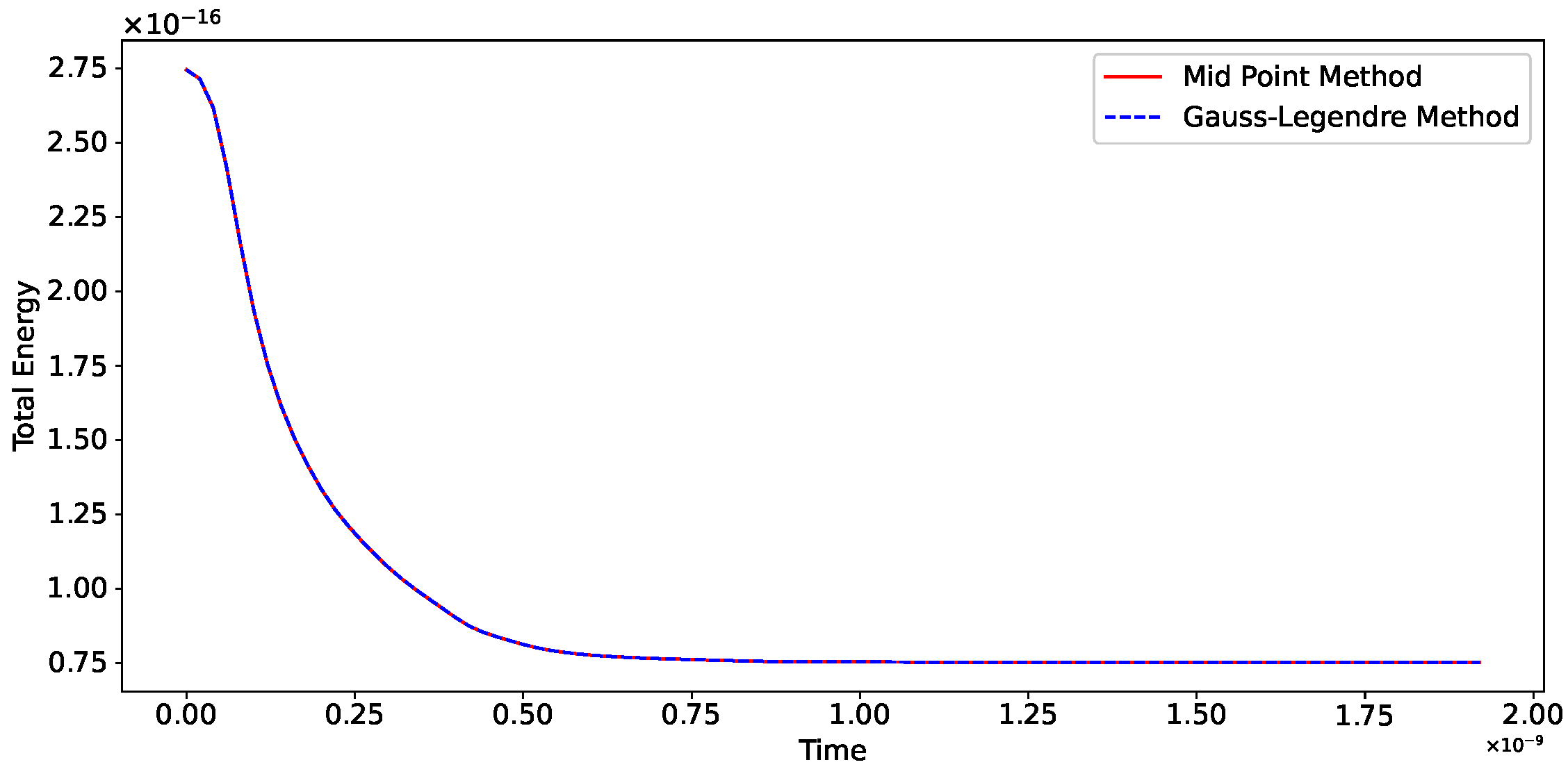
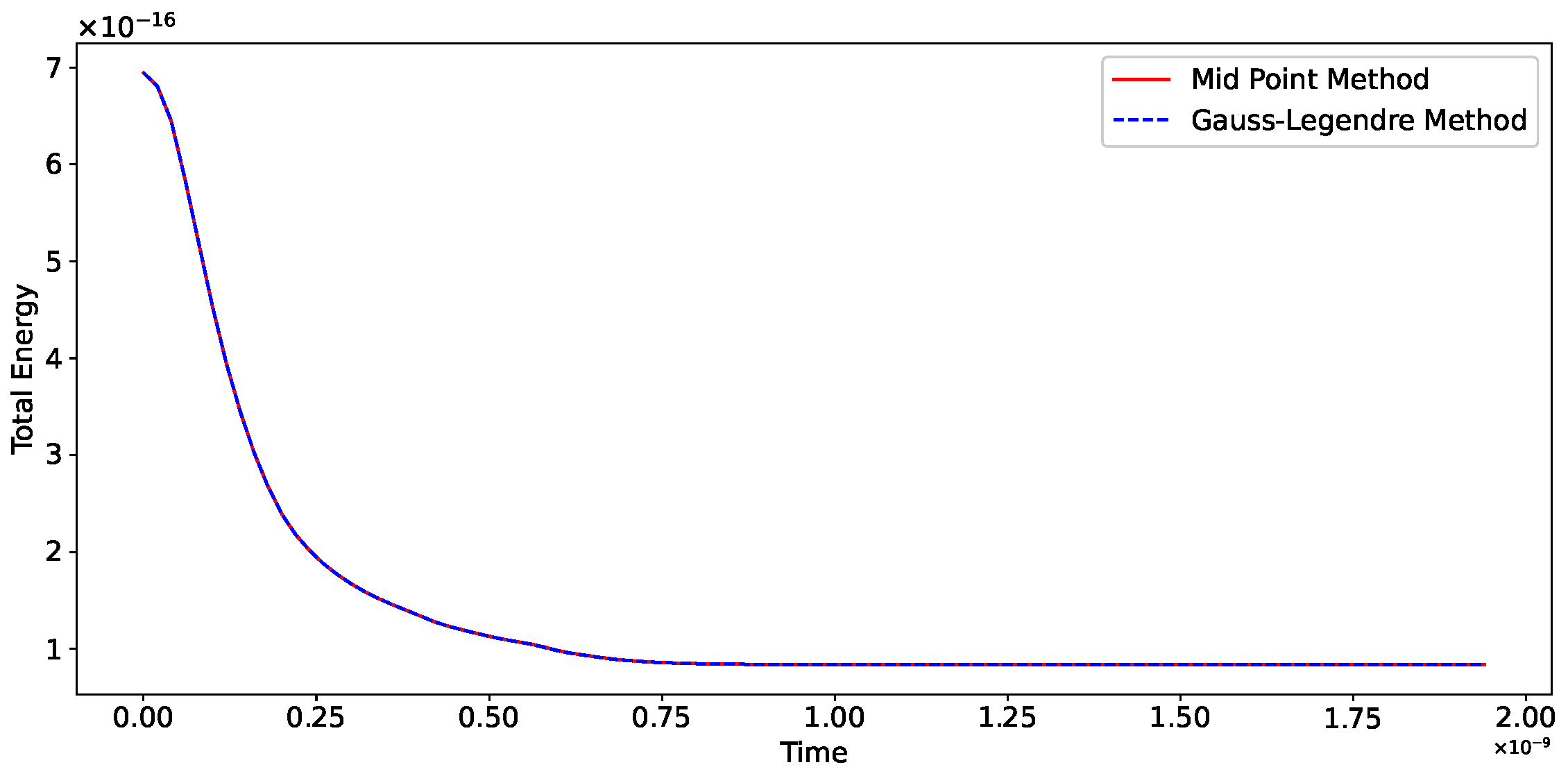
4. Preservation of the Lyapunov Structure
5. Numerical Experiments
5.1. Accuracy Test
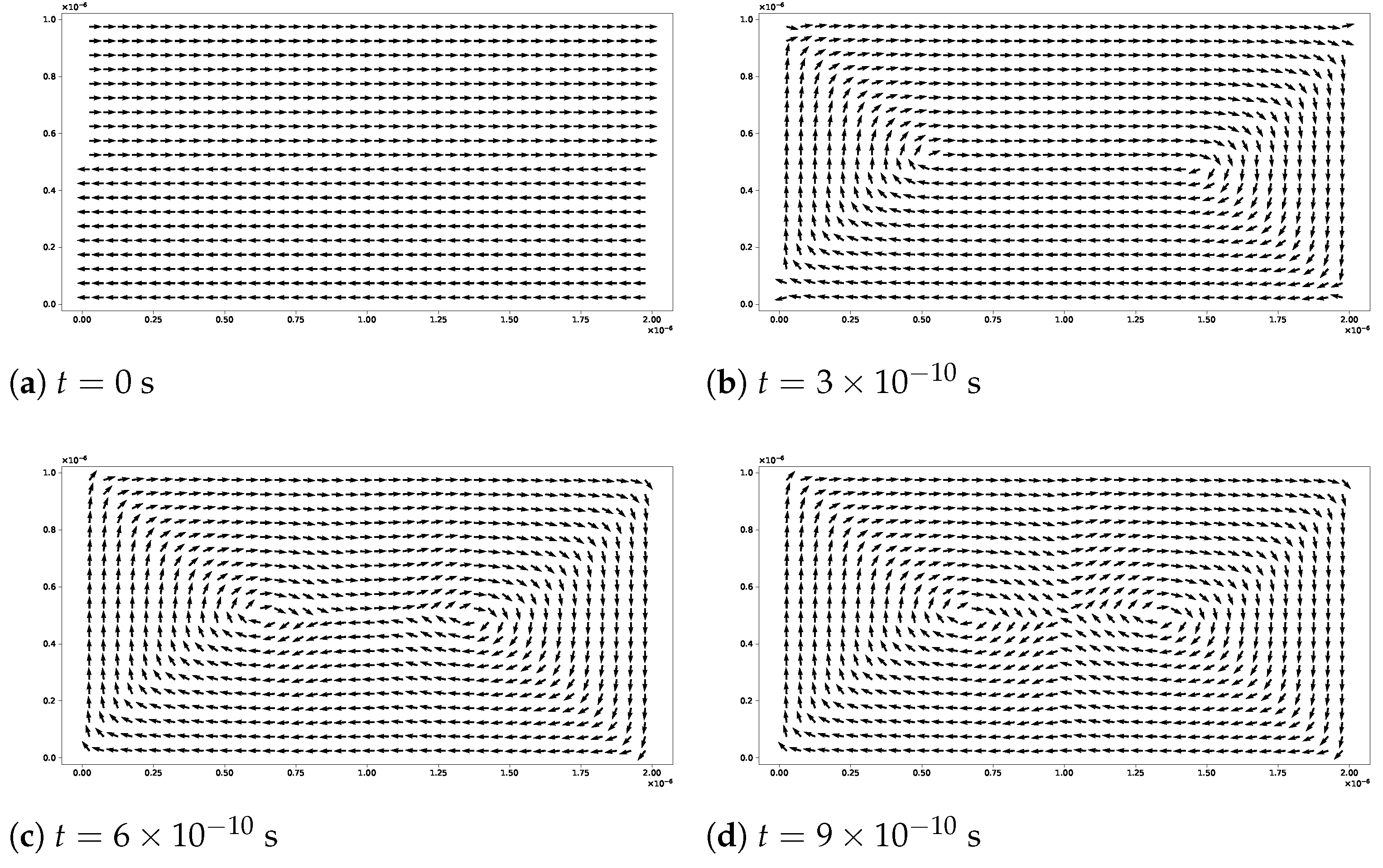
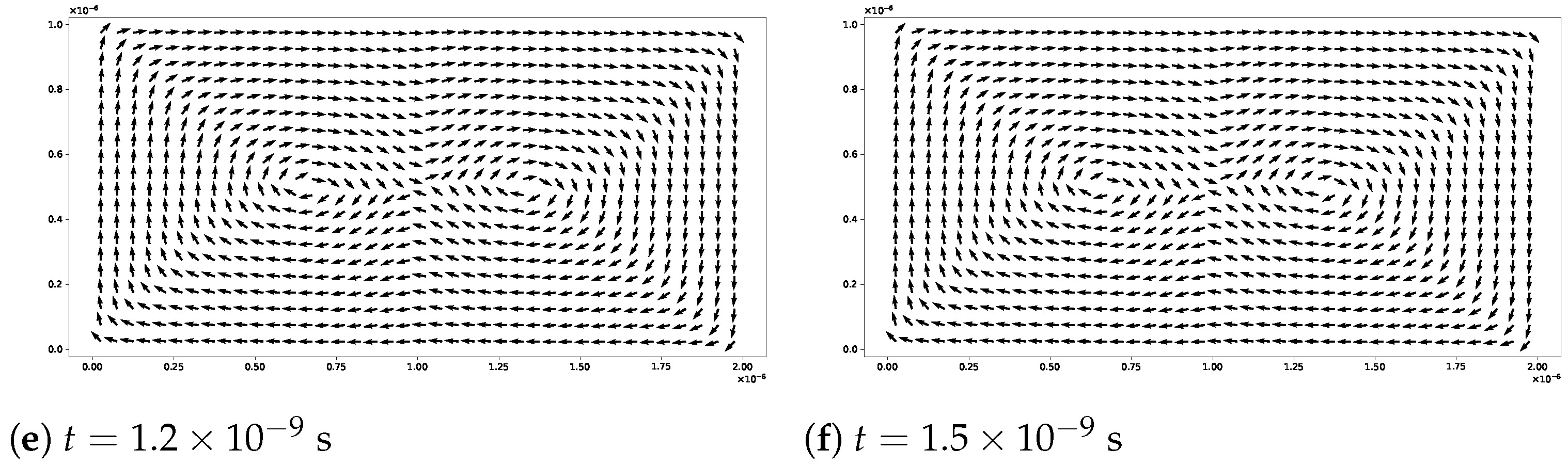
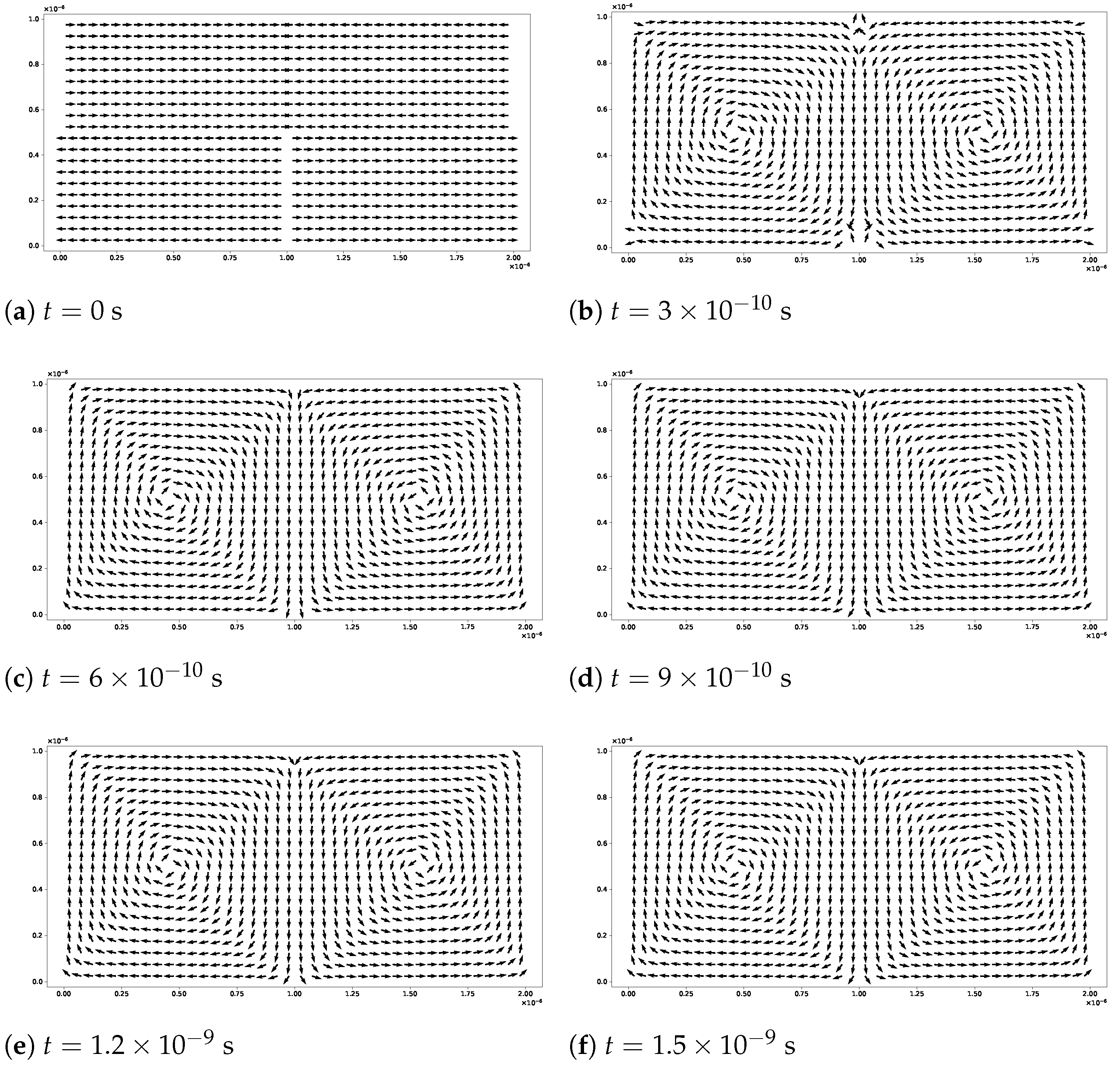
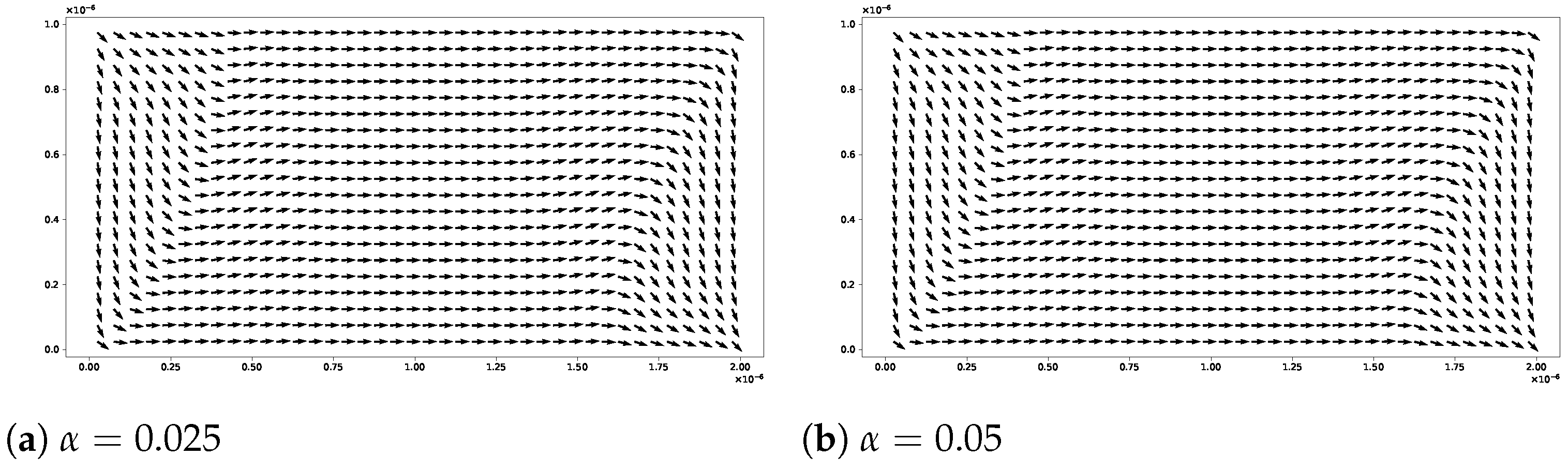
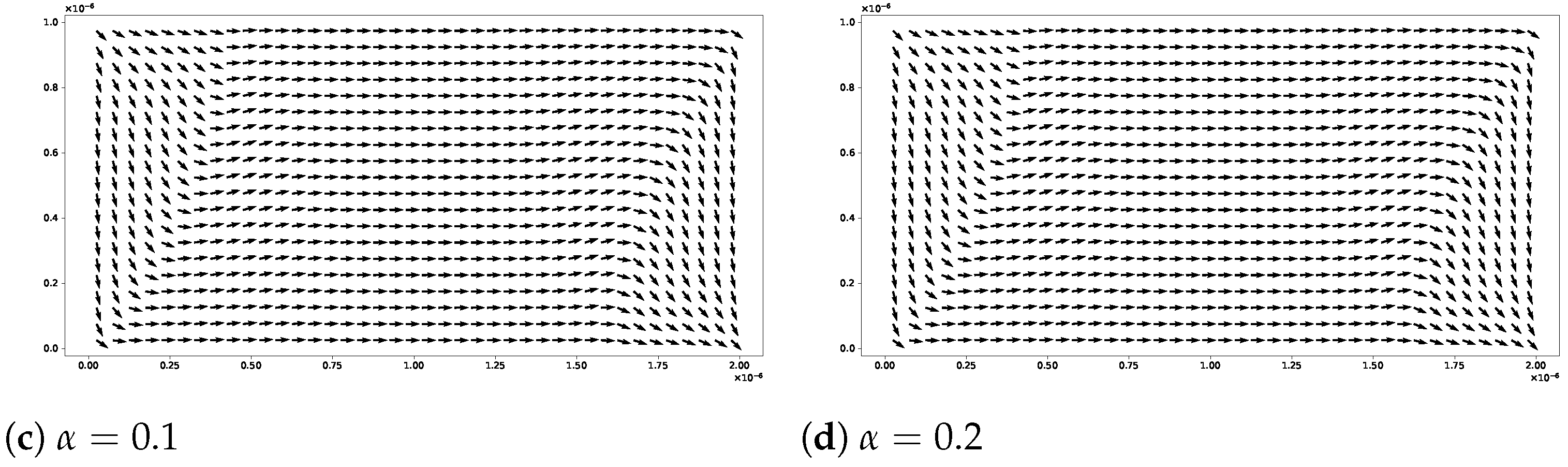
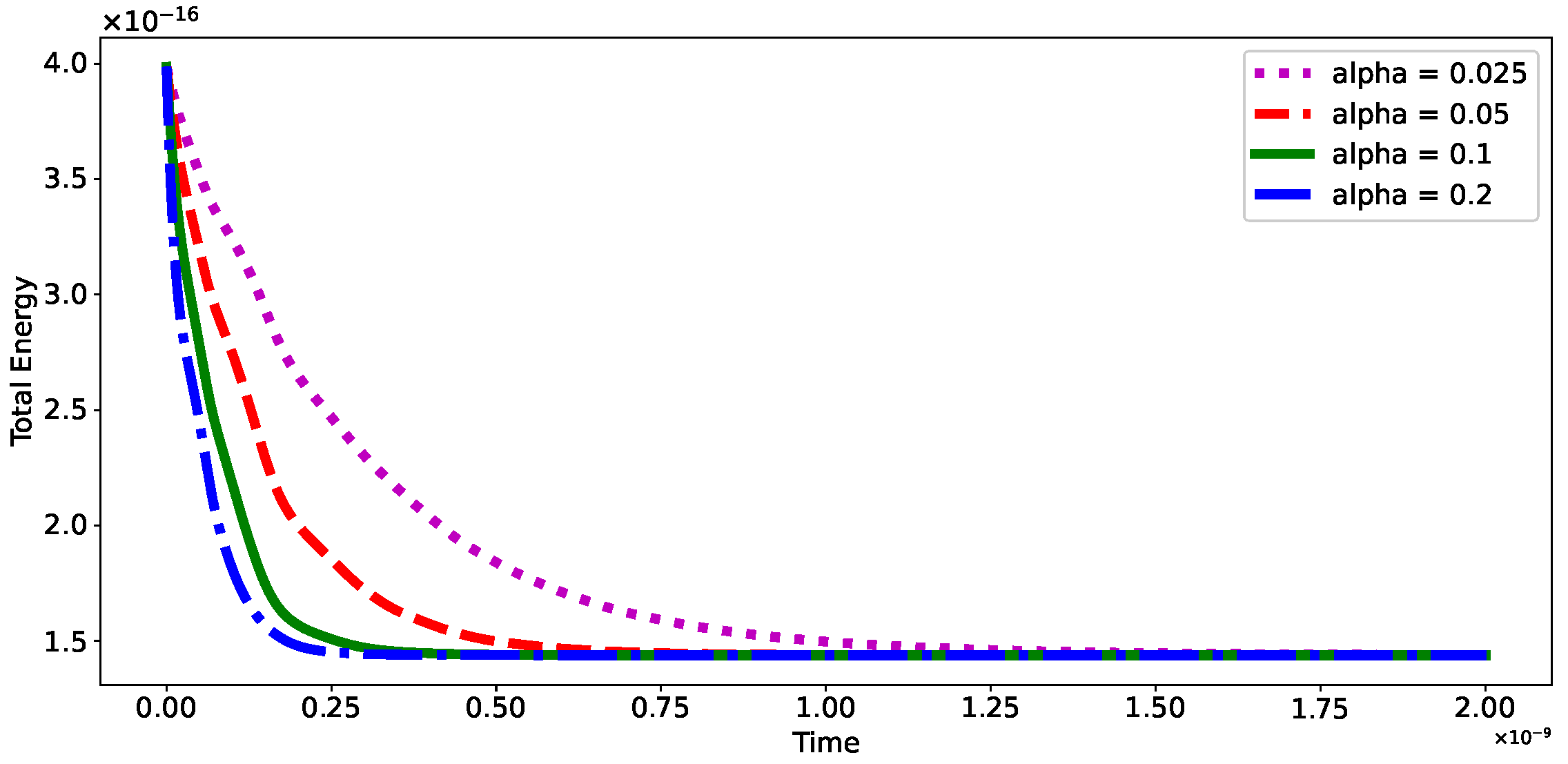
5.2. Numerical Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Baibich, M.N.; Broto, J.M.; Fert, A.; Van Dau, F.N.; Petroff, F.; Etienne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant magnetoresistance of (001) Fe/(001) Cr magnetic superlattices. Phys. Rev. Lett. 1988, 61, 2472. [Google Scholar] [CrossRef] [PubMed]
- Binasch, G.; Grünberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 1989, 39, 4828. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Tondra, M.; Pohm, A.V.; Nordman, C.; Anderson, J.; Daughton, J.M.; Black, W.C. Spin dependent tunneling devices fabricated for magnetic random access memory applications using latching mode. J. Appl. Phys. 2000, 87, 6385–6387. [Google Scholar] [CrossRef]
- Lnu, S. Magnetoresistive Random Access Memory (MRAM) Technology: Current Advancement and Future Development. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2010. [Google Scholar]
- Aharoni, A. Introduction to the Theory of Ferromagnetism; Clarendon Press: Oxford, UK, 2000; Volume 109. [Google Scholar]
- Bertotti, G.; Serpico, C.; Mayergoyz, I.D. Nonlinear magnetization dynamics under circularly polarized field. Phys. Rev. Lett. 2001, 86, 724. [Google Scholar] [CrossRef] [PubMed]
- Kikuchi, R. On the minimum of magnetization reversal time. J. Appl. Phys. 1956, 27, 1352–1357. [Google Scholar] [CrossRef]
- Mallinson, J.C. Damped gyromagnetic switching. IEEE Trans. Magn. 2000, 36, 1976–1981. [Google Scholar] [CrossRef]
- Serpico, C.; Mayergoyz, I.D.; Bertotti, G. Analytical solutions of Landau–Lifshitz equation for precessional switching. J. Appl. Phys. 2003, 93, 6909–6911. [Google Scholar] [CrossRef]
- Cimrák, I. A survey on the numerics and computations for the Landau-Lifshitz equation of micromagnetism. Arch. Comput. Method Eng. 2007, 15, 1–37. [Google Scholar] [CrossRef]
- García-Cervera, C.J. Numerical micromagnetics: A review. Bol. Soc. Esp. Mat. Apl. 2007, 39, 103–136. [Google Scholar]
- Fidler, J.; Schrefl, T. Micromagnetic modelling-the current state of the art. J. Phys. D Appl. Phys. 2000, 33, R135. [Google Scholar] [CrossRef]
- Yang, L.; Chen, J.; Hu, G. A framework of the finite element solution of the Landau-Lifshitz-Gilbert equation on tetrahedral meshes. J. Comput. Phys. 2021, 431, 110142. [Google Scholar] [CrossRef]
- Nakatani, Y.; Uesaka, Y.; Hayashi, N. Direct solution of the Landau-Lifshitz-Gilbert equation for micromagnetics. Jpn. J. Appl. Phys. 1989, 28, 2485. [Google Scholar] [CrossRef]
- Li, P.; Yang, L.; Lan, J.; Du, R.; Chen, J. A second-order semi-implicit method for the inertial Landau-Lifshitz-Gilbert equation. Numer. Math. Theor. Meth. Appl. 2023, 16, 182–203. [Google Scholar] [CrossRef]
- Liu, C.S. Lie symmetry of the Landau-Lifshitz-Gilbert equation and exact linearization in the Minkowski space. J. Math. Phys. 2004, 55, 606–625. [Google Scholar] [CrossRef]
- García-Cervera, C.J.; E, W. Improved Gauss-Seidel projection method for micromagnetics simulations. IEEE Trans. Magn. 2003, 39, 1766–1770. [Google Scholar] [CrossRef]
- Wang, X.; García-Cervera, C.J.; E, W. A Gauss–Seidel projection method for micromagnetics simulations. J. Comput. Phys. 2001, 171, 357–372. [Google Scholar] [CrossRef]
- Krishnaprasad, P.S.; Tan, X. Cayley transforms in micromagnetics. Phys. B Condens. Matter 2001, 306, 195–199. [Google Scholar] [CrossRef]
- Lewis, D.; Nigam, N. Geometric integration on spheres and some interesting applications. J. Comput. Appl. Math. 2003, 151, 141–170. [Google Scholar] [CrossRef]
- d’Aquino, M.; Serpico, C.; Miano, G. Geometrical integration of Landau–Lifshitz–Gilbert equation based on the mid-point rule. J. Comput. Phys. 2005, 209, 730–753. [Google Scholar] [CrossRef]
- Spargo, A.W.; Ridley, P.H.W.; Roberts, G.W. Geometric integration of the Gilbert equation. J. Appl. Phys. 2003, 93, 6805–6807. [Google Scholar] [CrossRef]
- Joly, P.; Vacus, O. Mathematical and numerical studies of non linear ferromagnetic materials. ESAIM-Math. Model. Numer. Anal. 1999, 33, 593–626. [Google Scholar] [CrossRef]
- Monk, P.B.; Vacus, O. Accurate discretization of a non-linear micromagnetic problem. Comput. Meth. Appl. Mech. Eng. 2001, 190, 5243–5269. [Google Scholar] [CrossRef]
- d’Aquino, M.; Serpico, C.; Miano, G.; Mayergoyz, I.D.; Bertotti, G. Numerical integration of Landau–Lifshitz–Gilbert equation based on the midpoint rule. J. Appl. Phys. 2005, 97, 10E319. [Google Scholar] [CrossRef]
- Fuwa, A.; Ishiwata, T.; Tsutsumi, M. Finite difference scheme for the Landau–Lifshitz equation. Jpn. J. Ind. Appl. Math. 2012, 29, 83–110. [Google Scholar] [CrossRef]
- Shepherd, D.; Miles, J.; Heil, M.; Mihajlović, M. An adaptive step implicit midpoint rule for the time integration of Newton’s linearisations of non-linear problems with applications in micromagnetics. J. Sci. Comput. 2019, 80, 1058–1082. [Google Scholar] [CrossRef]
- Zhan, J.; Yang, L.; Du, R.; Cui, Z. Towards preserving geometric properties of Landau-Lifshitz-Gilbert equation using multistep methods. Commun. Comput. Phys. 2024; accepted. [Google Scholar]
- Akrivis, G.; Feischl, M.; Kovács, B.; Lubich, C. Higher-order linearly implicit full discretization of the Landau–Lifshitz–Gilbert equation. Math. Comput. 2021, 90, 995–1038. [Google Scholar] [CrossRef]
- Huang, Z. High accuracy numerical method of thin-film problems in micromagnetics. J. Comput. Math. 2003, 21, 33–40. [Google Scholar]
- Gilbert, T.L. A phenomenological theory of damping in ferromagnetic materials. IEEE Trans. Magn. 2004, 40, 3443–3449. [Google Scholar] [CrossRef]
- Prohl, A. Computational Micromagnetism; Advances in Numerical Mathematics; Vieweg+Teubner Verlag: Wiesbaden, Germany, 2001. [Google Scholar] [CrossRef]
- Stoer, J.; Bulirsch, R. Introduction to Numerical Analysis; Texts in Applied Mathematics; Springer: New York, NY, USA, 2002; Volume 12. [Google Scholar] [CrossRef]
- Shen, J.; Tang, T.; Wang, L.L. Spectral Methods: Algorithms, Analysis and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 41. [Google Scholar]
- Donahue, M.J.; Porter, D.G. OOMMF User’s Guide, Version 1.0; National Institute of Standards and Technology: Gaithersburg, MD, USA, 1999.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | Order | ||
|---|---|---|---|
| 2 × 10−4 | 2 × 10−1 | 2.6011 × 10−5 | - |
| 1.41 × 10−4 | 1 × 10−1 | 6.6369 × 10−6 | 3.9411 |
| 1 × 10−4 | 5 × 10−2 | 1.6495 × 10−6 | 4.0170 |
| 7.07 × 10−5 | 2.5 × 10−2 | 4.1832 × 10−7 | 3.9586 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, J.; Yang, L.; Zhan, J. Temporal High-Order Accurate Numerical Scheme for the Landau–Lifshitz–Gilbert Equation. Mathematics 2024, 12, 1179. https://doi.org/10.3390/math12081179
He J, Yang L, Zhan J. Temporal High-Order Accurate Numerical Scheme for the Landau–Lifshitz–Gilbert Equation. Mathematics. 2024; 12(8):1179. https://doi.org/10.3390/math12081179
Chicago/Turabian StyleHe, Jiayun, Lei Yang, and Jiajun Zhan. 2024. "Temporal High-Order Accurate Numerical Scheme for the Landau–Lifshitz–Gilbert Equation" Mathematics 12, no. 8: 1179. https://doi.org/10.3390/math12081179