1. Introduction
Reaction–diffusion equations are models for the densities of substances or living things that disperse over space by Brownian motion, random walks, hydrodynamic turbulence, or other comparable mechanisms that react to one another and their environment in ways that affect their local densities. Even though they are essentially deterministic, reaction–diffusion models can be created as limits of stochastic processes with the right scaling [
1]. Grzybowski in [
1] proposed a modeling strategy that specifically enables us to convert presumptions about stochastic local movement into deterministic descriptions of global densities. Reaction–diffusion models approach time and space as continuous, describe population densities, and are spatially explicit. These characteristics set them apart from other categories of spatial models like metapopulation models, integrodifference models, and interacting particle systems [
2]. The existence of a minimal patch size required to support a population, the presence of traveling wavefronts corresponding to biological invasions, and the emergence of spatial patterns are the three main ecological phenomena supported by reaction–diffusion equations [
3]. Shi et al. worked on a multimodal hybrid parallel network intrusion detection model [
4], and Zhang et al. worked on geometric landmarks and kinetic constraints [
5,
6]. Zou et al. were concerned with the Riemann–Hilbert approach for the higher-order Gerdjikov–Ivanov equation with nonzero boundary conditions [
7]. Solhi et al. worked on stochastic fractional Volterra integro-differential equations by using the enhanced moving least squares method [
8].
The two components of the mathematical model are an ordinary differential equation (ODE) that depicts quorum sensing among the bacteria and a reaction–diffusion equation, also referred to as a parabolic partial differential equation, that describes the formation of biofilms [
9]. Bacteria communicate information about cell density and modify gene expression through the process of quorum sensing, which requires cell-to-cell communication. One well-known type of equation system that has been used to represent, for example, interactions between cellular processes like cell growth in mathematical biology is the reaction–diffusion–ODE model. This model produces two results: bacterial concentration, which over time demonstrates the development and decomposition of the biofilm, and biofilm bacteria collaboration, which demonstrates the potency of resistance and defense against environmental stimuli. [
10]. Baber et al. investigated optimization and exact solutions for the for biofilm model [
11]. But, in this study we will consider the biofilm model under the effects of noise and investigate the computational numerical results and solitary wave solutions. Mainly, we focused on comparing these results via simulations. So, this is described by the reaction–diffusion model and written as [
12]
Here,
and
are the maximum function
, where
is the cooperation of the bacteria.
means no cooperation;
means maximal cooperation. The simplified form of the above system is taken as follows:
where
is concentration of bacteria and the variable
x denotes position. Since each bacteria has a fixed size, the values of
and
represent cooperation and biofilm thickness, respectively. The population density in an
x neighborhood at time
t is measured by quorum functional
k, and is employed in quorum sensing models;
is the quorum sense and
is a function that is either spreading more quickly (bigger A) in a thinner biofilm that offers less protection due to less collaboration (smaller
) or is spreading more slowly (smaller A) and constructing a more robust biofilm with greater cooperation (larger
). Also,
A is the relative size. Meanwhile, the positive constants that depend on the bacterial strain and the environment are
,
,
A,
, and
. It will be feasible to predict how a patient’s biofilm will evolve using these predictive parameters, allowing for the selection of the best course of action. Moreover, the noise control parameters are
and
along with
, which is the multiplicative time noise.
These days, stochastic modeling is a hot field of research. Many researchers are working on stochastic models, both numerically and analytically. There are various techniques for investigating the exact solitary wave and approximate solutions for nonlinear stochastic partial differential equations (SPDEs). The different numerical schemes include the forward Euler difference scheme [
13], the non-standard finite difference scheme [
14], the backward Euler difference scheme [
15], the implicit finite difference scheme [
16], the Crank–Nikolson finite difference scheme [
17], etc. On the other hand, to find exact solutions many analytical techniques are used to explore exact solutions for nonlinear PDEs, such as the new modified extended direct algebraic method [
18], the
-model expansion method [
19], the Riccati equation mapping method [
20], the Hirota bilinear method [
21,
22], the modified exponential rational function method [
23], and the
-model expansion method [
24].
When we see most physical phenomena at the microscale and magnify them, these phenomena are stochastic or random phenomena. It is very natural to consider the differential equation, which has some kind of randomness involved. So, if this randomness is bounded in the solution of the differential equations, such problems are stochastic differential equations.
The numerical solution of the stochastic differential equation is not a simple job. It becomes more difficult when our governing equation is a nonlinear stochastic differential equation and we have tried to overcome such issues. We have used the numerical method. The proposed scheme is consistent with the given PDE, and it is conditionally stable and time efficient.
In this study, we mainly focus on numerical and exact solitary wave solutions under the noise effect. The reaction–diffusion biofilm model is analyzed under quorum sensing. Quorum sensing is the process of communication between cells that permits bacterial communication about cell density and alterations in gene expression. This model produces two results: bacterial concentration, which over time demonstrates the development and decomposition of the biofilm, and biofilm bacteria collaboration, which demonstrates the potency of resistance and defense against environmental stimuli. The numerical solutions are gained by a proposed finite difference scheme, more efficient than others. The advantages of the “Forward difference formula” are as follows: (i) it is easy to compute; (ii) it is time-efficient; (iii) high-efficiency computers are required for implicit methods, and for the forward method low-efficiency computers can be used. The analysis of the scheme, like consistency and stability, is checked to ensure how our scheme behaves. On the other hand, exact solitary wave solutions are gained by using the generalized Riccati equation mapping method. This method is easy to deal with and provides us trigonometric, hyperbolic, and rational solutions as well. In the present literature, researchers are dealing with the problems numerically and analytically separately. Therefore, there is a huge gap in the comparison of the results.
The novelty of this work is that we compare the numerical results with newly constructed soliton solutions. For the comparison of the results, the initial conditions (ICs) and boundary conditions (BCs) are required for the numerical purpose, so we construct the ICs and BCs by selecting the soliton solutions. The soliton solutions are compared with the numerical solution provided by the scheme, which gives us almost the same behaviors. These results are very helpful for the further study of the nonlinear reaction–diffusion models under the noise effect. Some main properties of the Brownian motion are presented in the next result.
Definition 1 ([
25,
26])
. Wiener process and Itô integral: The Brownian motion is a stochastic process and fulfills the following properties:- 1.
with probability 1;
- 2.
is the continuous function of ;
- 3.
and are independent increments for all ;
- 4.
, has normal distribution ;
- 5.
for each value , where represents the expected value of noise;
- 6.
for each value ;
- 7.
;
- 8.
.
2. Stochastic Finite Difference Scheme
This current sections deals with the proposed non-standard finite difference scheme (NSFDS). First, we divide the domain and into with space and times stepsizes and , respectively. Then, , and , for
We approximate the continuous derivatives with a discrete approximation, such as
Here, we suppose
and
are the time and space stepsizes, respectively. Putting the above approximations in (
3)–(
4), we obtain the NSFDS as follows:
Here,
,
and
are the approximations of the state variables
and
at the point
, respectively. So, this is the required NSFD scheme of the system (
3)–(
4).
Consistency of Schemes
In this section, we discuss the consistence of the proposed NSFD schemes (
6)–(
7).
Theorem 1. The proposed NSFD schemes (6)–(7) are consistent in the mean square sense for X and Y. Proof. For scheme (
6),
is the smooth function, so we suppose an operator
. Applying this operator on (
3), we obtain (see [
27])
and, therefore,
Then,
using the property of the Itô integral we obtain
So,
as
,
. Hence, the proposed scheme is consistent with (
3).
For scheme (
6),
is the smooth function, so we suppose the same operator
. Applying this operator on (
4), we obtain the following form:
and
Then,
and using the property of the Itô integral we obtain
Again,
as
,
. Hence, the proposed scheme is consistent with (
4). □
6. Physical Representation
In this section, the physical representation of the reaction–diffusion biofilm model under quorum sensing is discussed. Quorum sensing is the process of communication between cells that enables bacteria to exchange knowledge about cell density and modify gene expression accordingly. The unknown function
represents the bacterial concentration, which over time demonstrates the development, and
exhibits the biofilm breakdown and the cooperation of the bacteria within it, highlighting the biofilm capacity for resistance and defense against external stimuli. Physically, our results are very effective in this nonlinear biofilm model under noise effects. When communication takes place between different cell–cell communication of density and adjusts gene expression accordingly the information is moved from one cell to another cell in the form of energy wave packets. The energy wave packets move in random motions, so our wave structures are very suitable solutions that provide better communication between the bacterial cells. To construct the solitary wave solutions that are depicted in
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5 and
Figure 6 under the different effects of noise we used the MATHEMATICA11.1 software, while the comparison results in
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14 were drawn by using the MATLAB2015a.
6.1. Solitary Wave Solutions
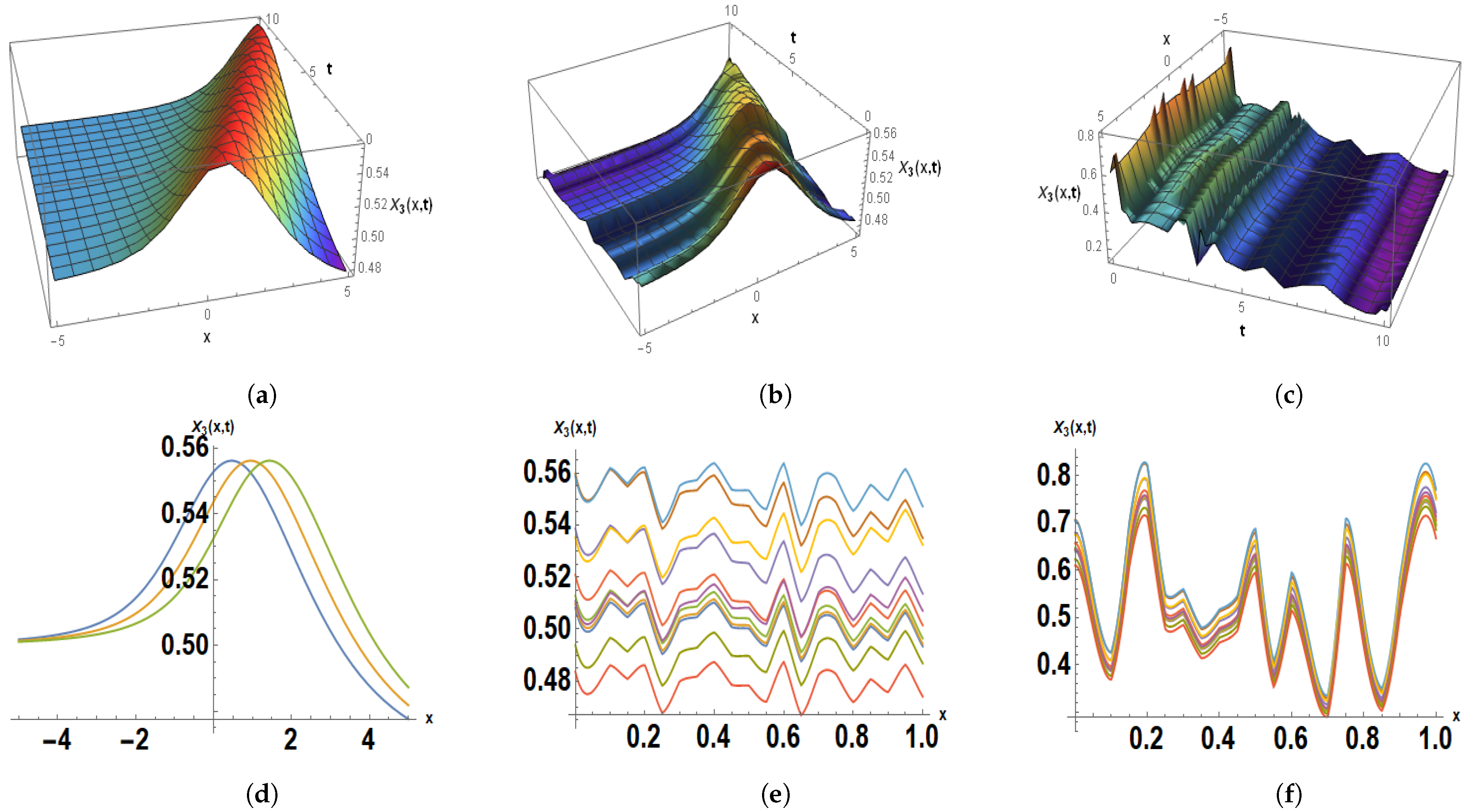
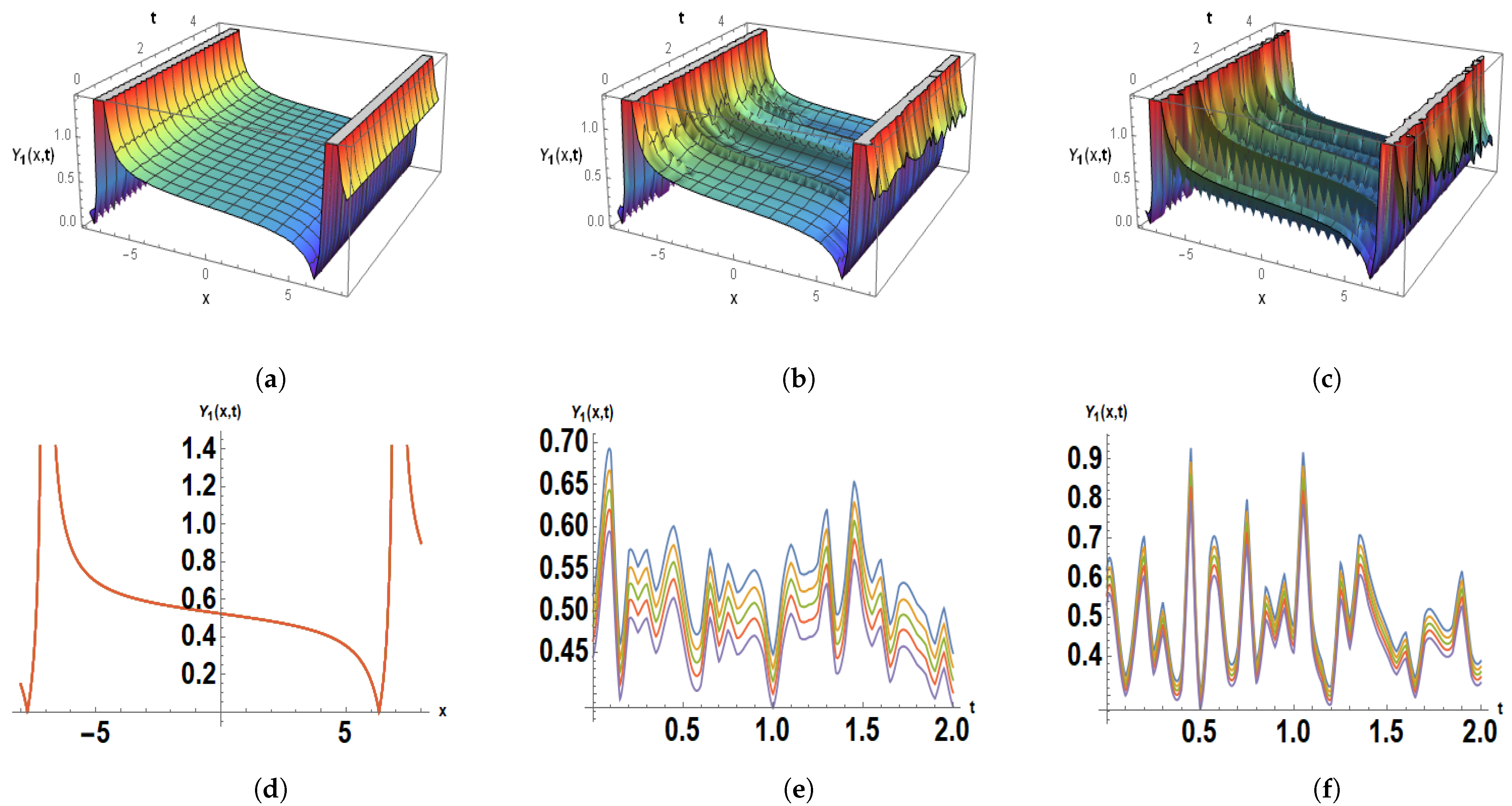
In this subsection, we discuss the physical behavior of the solitons and solitary wave solutions and their effects under noise. Solitons and solitary wave solutions can exhibit complex and diverse behavior when examining the biofilm model and quorum sensing in the context of noise. To completely understand this, one must consider both the mathematical features of the model and the biological impacts. Self-reinforcing, contained, stable waves that can maintain their shape and speed as they travel across a medium are referred to as solitons in mathematics. Solitons are commonly solitary wave solutions for some nonlinear partial differential equations (PDEs) that describe physical phenomena, such as biofilm formation under quorum sensing. The behavior of solitons and solitary waves can be greatly affected by the introduction of noise, either intrinsic or external. Random fluctuations or disturbances in the system can be used to mimic noise. Typically, stochastic partial differential equations (SPDEs) are used to study the impact of noise on solitons in PDEs. When choosing zero noise, these plots clearly demonstrate the right soliton shape.
Some solutions are presented in both 3D and 2D form for various values of the control parameter
.
Figure 1 and
Figure 4 provide us with the dark soliton.
Figure 2 and
Figure 5 give us the dark–bright soliton representations.
Figure 3 and
Figure 6 are plots for the solitary waves. Solitons can become unstable due to variations brought about by noise. Noise frequency and amplitude can affect how stable solitary wave solutions are.
The equilibrium between the intrinsic stability of the soliton and the intensity of the noise determines whether or not solitons persist in the presence of noise. Over time, noise can cause the soliton to spread out or lose its shape due to energy dissipation.
Diffusion processes generated by noise can characterize spreading behavior. Random disturbances or oscillations in the biofilm environment may interfere with soliton behavior.
There are several possible results from the interaction, such as the annihilation of existing solitons or the generation of new ones.
6.2. Comparison of Results
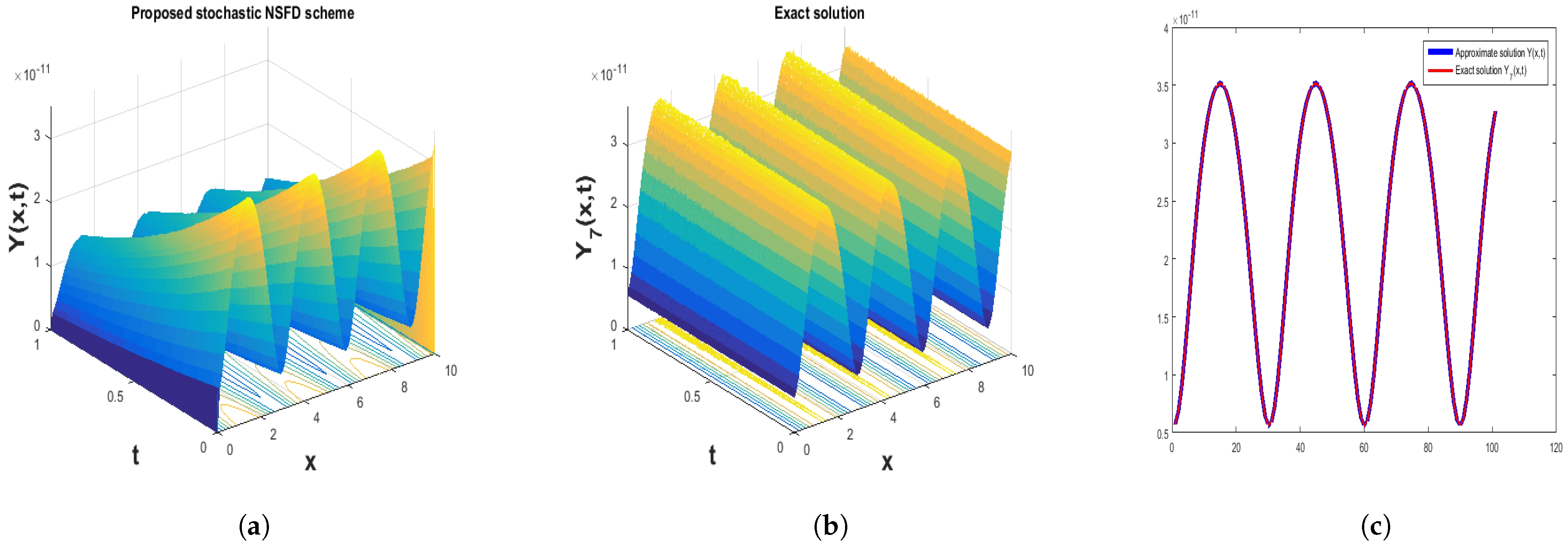
In this study, our main focus is to compare the numerical results with newly constructed exact solitary wave solutions. The proposed NSFD schemes are developed for the approximate solutions while generalized Riccati equation mapping is applied to gain the exact solitary wave solutions. Mainly, we compare the numerical result with selecting some exact solitary wave solutions. These results are visualized under the sense of noise, while we control the noise by and . The motivation behind constructing initial conditions (ICs) and boundary conditions (BCs) for comparing numerical and solitary wave solutions in stochastic reaction–diffusion models lies in the desire to understand and analyze the behavior of complex systems accurately. Stochastic reaction–diffusion models are often used to simulate various biological, chemical, or physical phenomena. Validating these models is crucial for ensuring their accuracy in predicting real-world behavior. Constructing ICs and BCs provides a tangible platform for comparing the results obtained from numerical simulations with experimental observations, thereby validating the numerical models. Solitary waves, also known as solitons, are localized wave solutions that propagate without changing their shape. These waves are significant in various fields, including biology, physics, and engineering. By comparing numerical solutions with experimental observations obtained from ICs and BCs, researchers can gain insights into the dynamics of solitary waves in stochastic reaction–diffusion systems, helping to refine theoretical models and understand their implications in real systems. For the numerical experiment we always need ICs and BCs that are usually constructed by the exact solutions. In this study, we constructed them from the newly exact solitary wave solutions to compare the results. All the figures clearly show random behavior in their physical representation. The 3D and line plot show almost the same behavior for both numerical and exact solutions. These results are a very effective study of the biofilm dynamical model. This study is very fruitful for the further investigation of the dynamical model. When we deal with the results at the microlevel they show the randomness in their behavior.
Test Problem 1: To compare the graphical representation the proposed scheme (
6) is considered for the approximate solutions while the exact solution, from (
45) and the IC, is taken as
Figure 7 represents the 3D and line behavior for the proposed scheme (
7) and exact solitary wave solution
using the parameters values as
,
and
.
Test Problem 2: To compare the graphical representation the proposed NSFD scheme (
6) is considered for the approximate solutions, while the exact solution from (
47) and the IC is taken as
and the BCs are
Figure 8 represents the 3D and line behavior for the proposed scheme (
6) and the exact solitary wave solution
using the parameter values
,
,
and
.
Test Problem 3: To compare the graphical representation the proposed NSFD scheme (
7) is considered for the approximate solutions while the exact solution from (
48) and the IC is taken as
Figure 9 represents the 3D and line behavior for the proposed scheme (
7) and the exact solitary wave solution
using the parameter values
and
.
Test Problem 4: To compare the graphical representation the proposed NSFD scheme (
6) is considered for the approximate solutions while the exact solution from (
53) and the IC is taken as
and the BCs are
Figure 10 represents the 3D and line behavior for the proposed scheme (
6) and the exact solitary wave solution
using the parameters
,
and
.
Test Problem 5: To compare the graphical representation the proposed NSFD scheme (
7) is considered for the approximate solutions while the exact solution from (
54) and the IC is taken as
Figure 11 represents the 3D and line behavior for the proposed scheme (
7) and the exact solitary wave solution
using the parameters
and
.
Test Problem 6: To compare the graphical representation the proposed NSFD scheme (
6) is considered for the approximate solutions while the exact solution from (
55) and the IC is taken as
and the BCs are
Figure 12 represents the 3D and line behavior for the proposed scheme (
6) and the exact solitary wave solution
using the parameters
,
.
Test Problem 7: To compare the graphical representation the proposed NSFD scheme (
7) is considered for the approximate solutions while the exact solution from (
54) and the IC is taken as
Figure 13 represents the 3D and line behavior for the proposed scheme (
7) and the exact solitary wave solution
using the parameters
and
.
Test Problem 8: To compare the graphical representation the proposed NSFD scheme (
6) is considered for the approximate solutions while the exact solution from (
77) and the IC is taken as
and the BCs are
Figure 14 represents the 3D and line behavior for the proposed scheme (
6) and the exact solitary wave solution
using the parameter values
,
,
and
.



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













