
A Reentry Trajectory Planning Algorithm via Pseudo-Spectral Convexification and Method of Multipliers



Abstract
1. Introduction
2. Problem Formulation
2.1. Reentry Dynamics
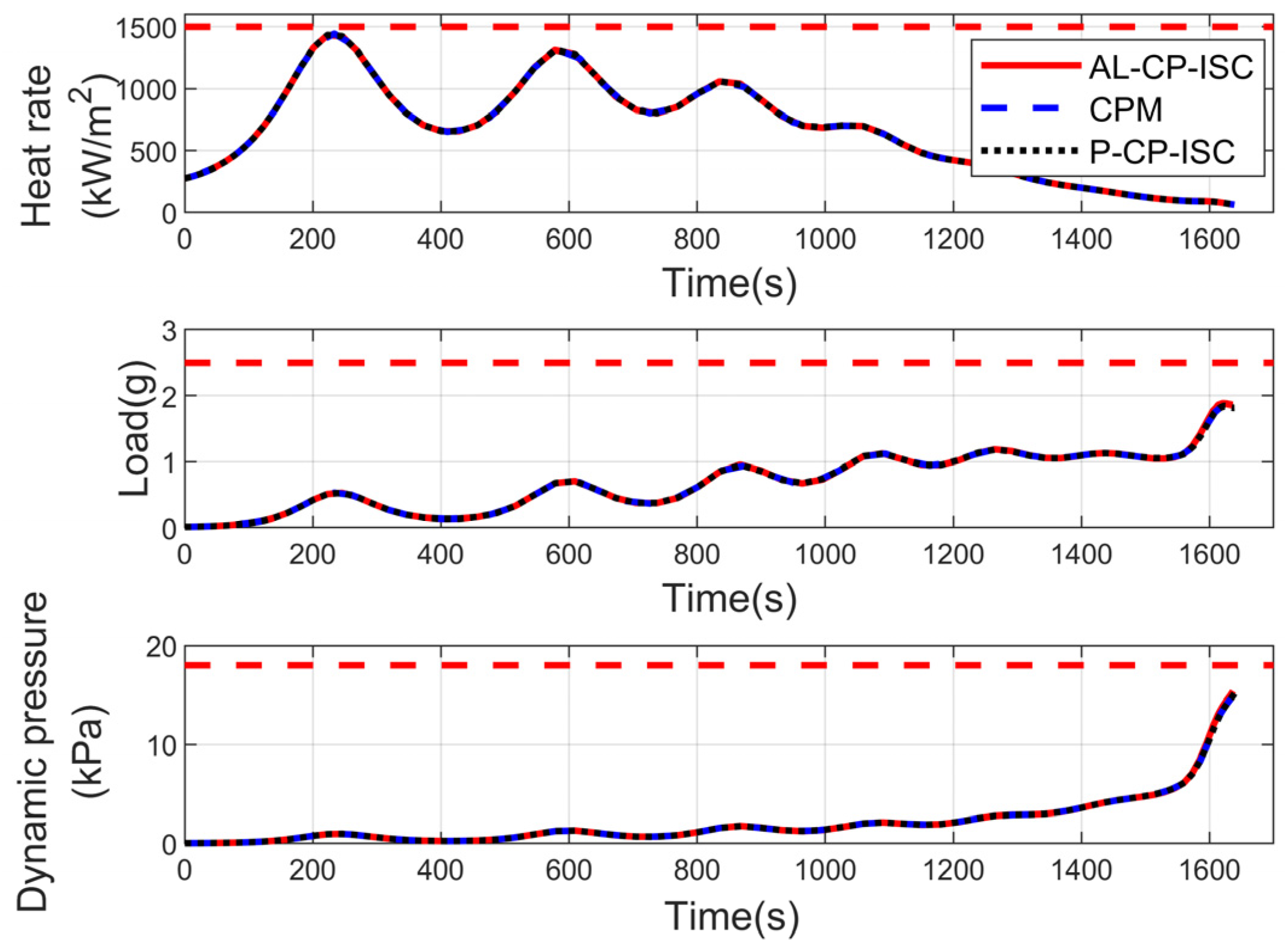
2.2. Constraint Conditions
2.3. Optimal Control Problem
3. Improved Sequential Convexification Algorithm
3.1. Discretization and Convexification
3.2. Problem Transformation
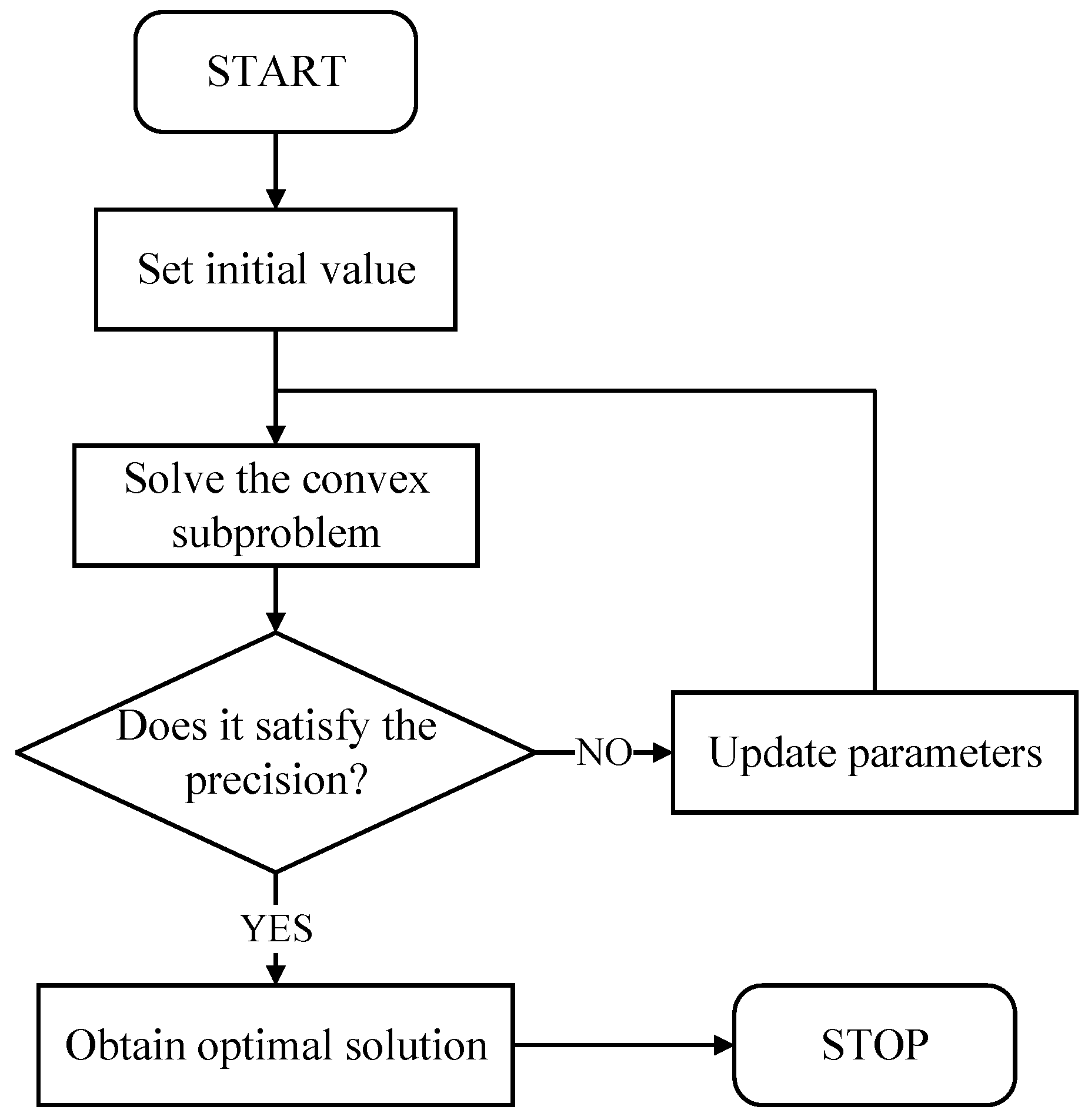
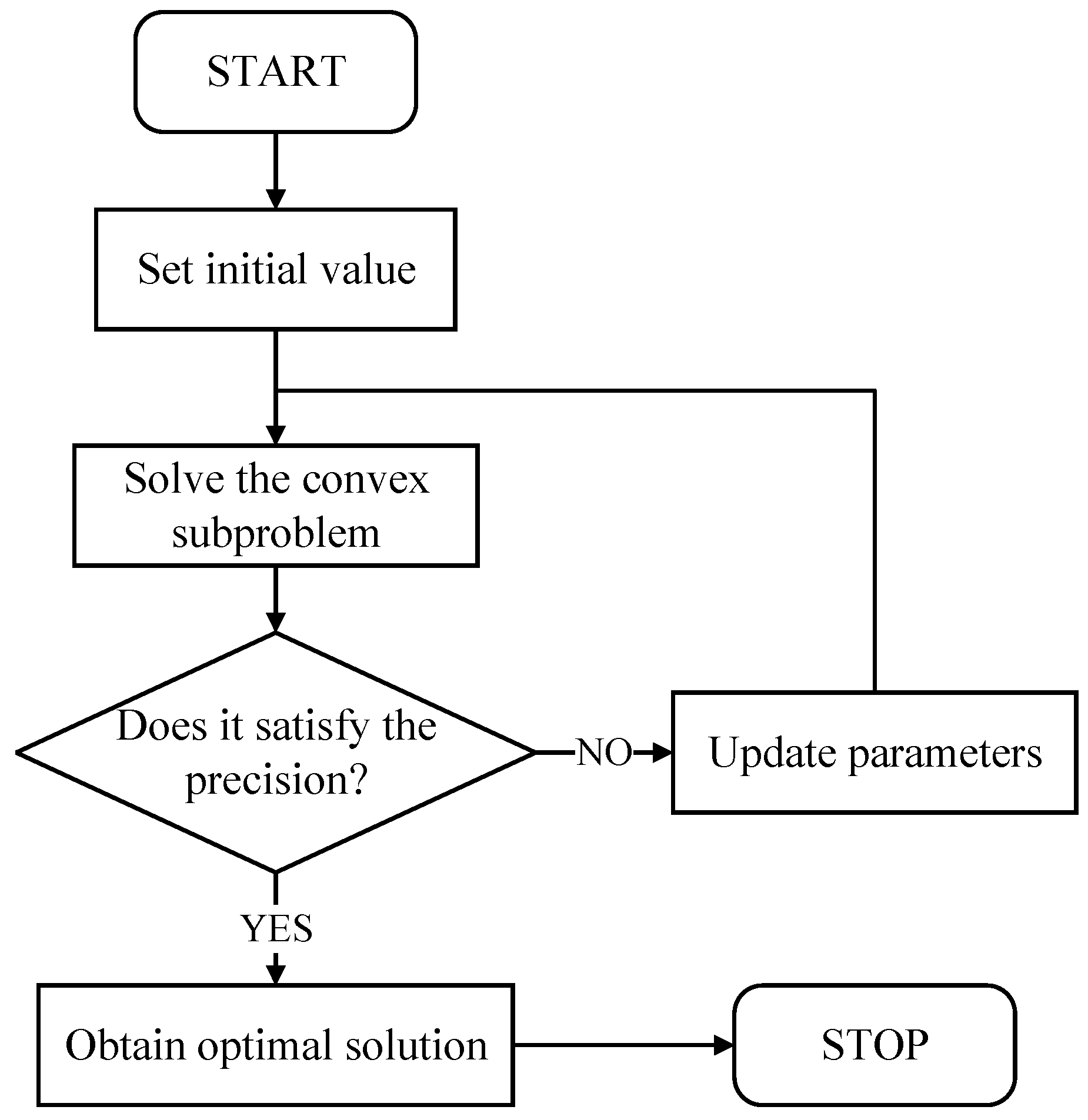
3.3. Solution Procedure
| Algorithm 1. AL-CP-ISC | |
| 1. Let , set the initial reference trajectory by propagating the dynamical Equation (1) with the fixed control variables. | |
| 2. Assign initial values to the following parameters: penalty parameters , penalty parameter update multiple , initial Lagrange multipliers , initial trust region radius , the iteration number of the trust region starts to update , the trust region contraction factor , and the number of discrete points . | |
| 3. , solve the convex subproblem by the interior point method, and find solution pairs: . | |
| 4. Define the value of constraint violation : | |
| (30) | |
| When , go to 6, otherwise, go to 5, where is a sufficiently small positive number. | |
| 5. Update penalty parameters and Lagrange multipliers . | |
| Then, , and go to 3. | |
| 6. Obtain the optimal solution of the original problem: | |
| . | |
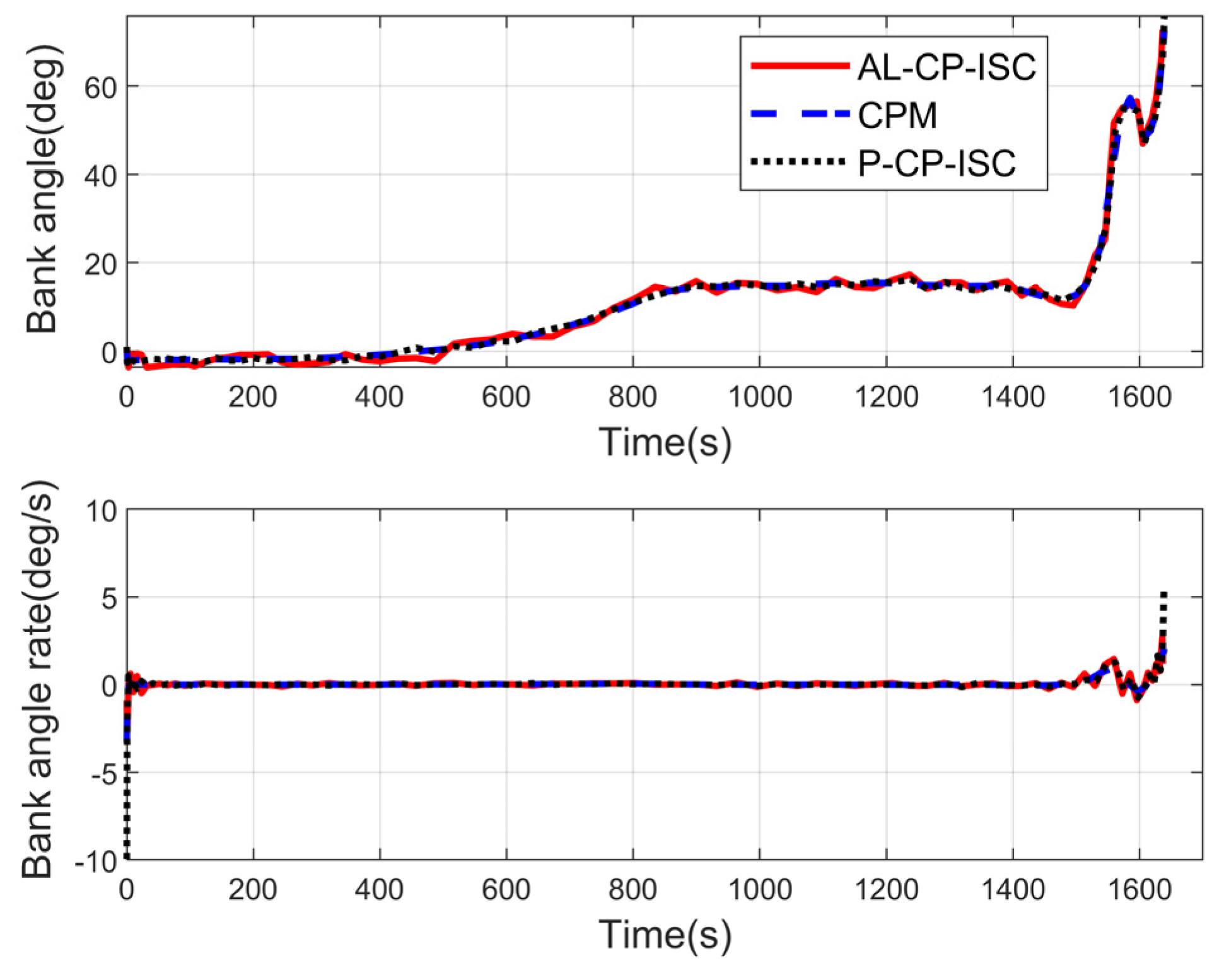
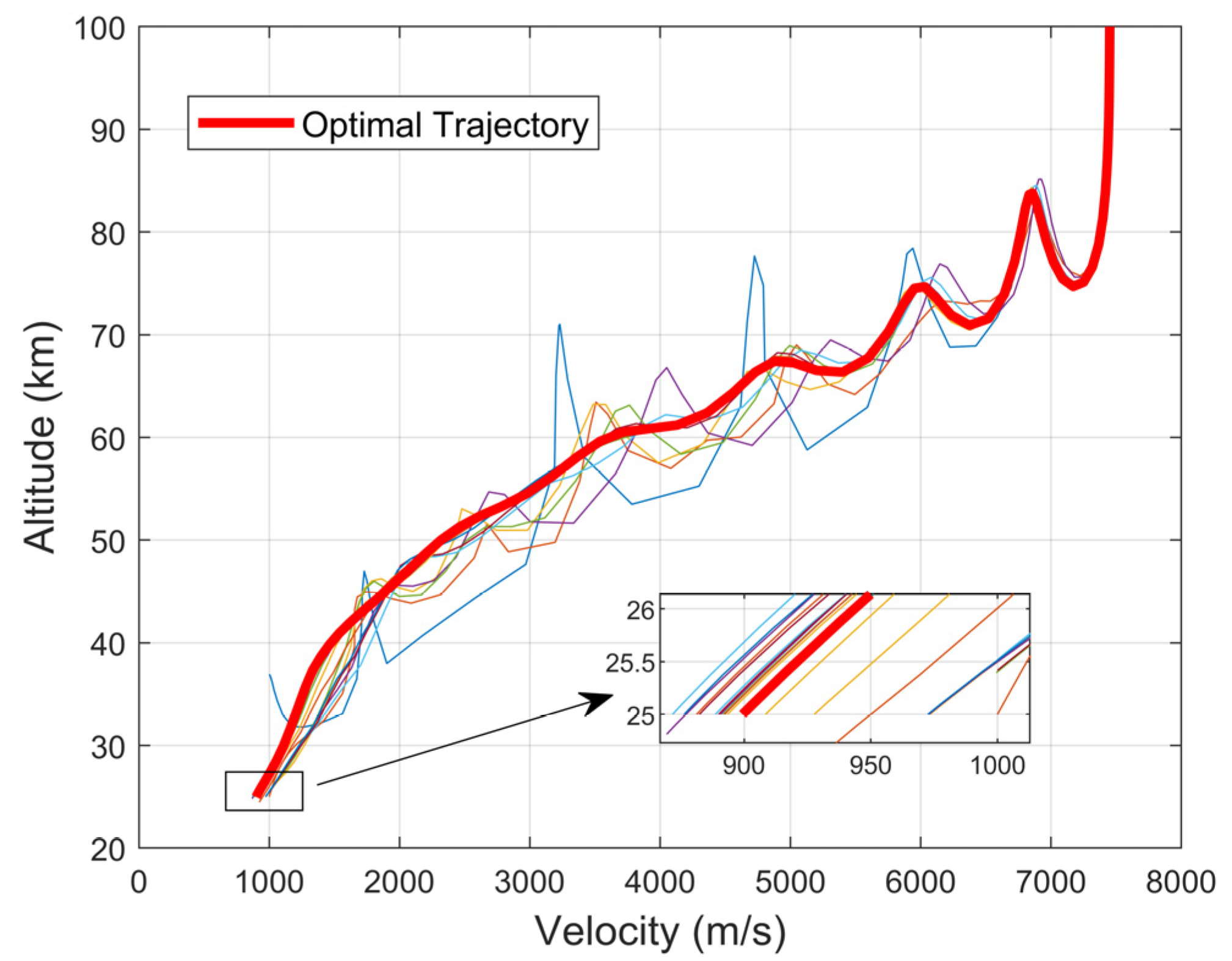
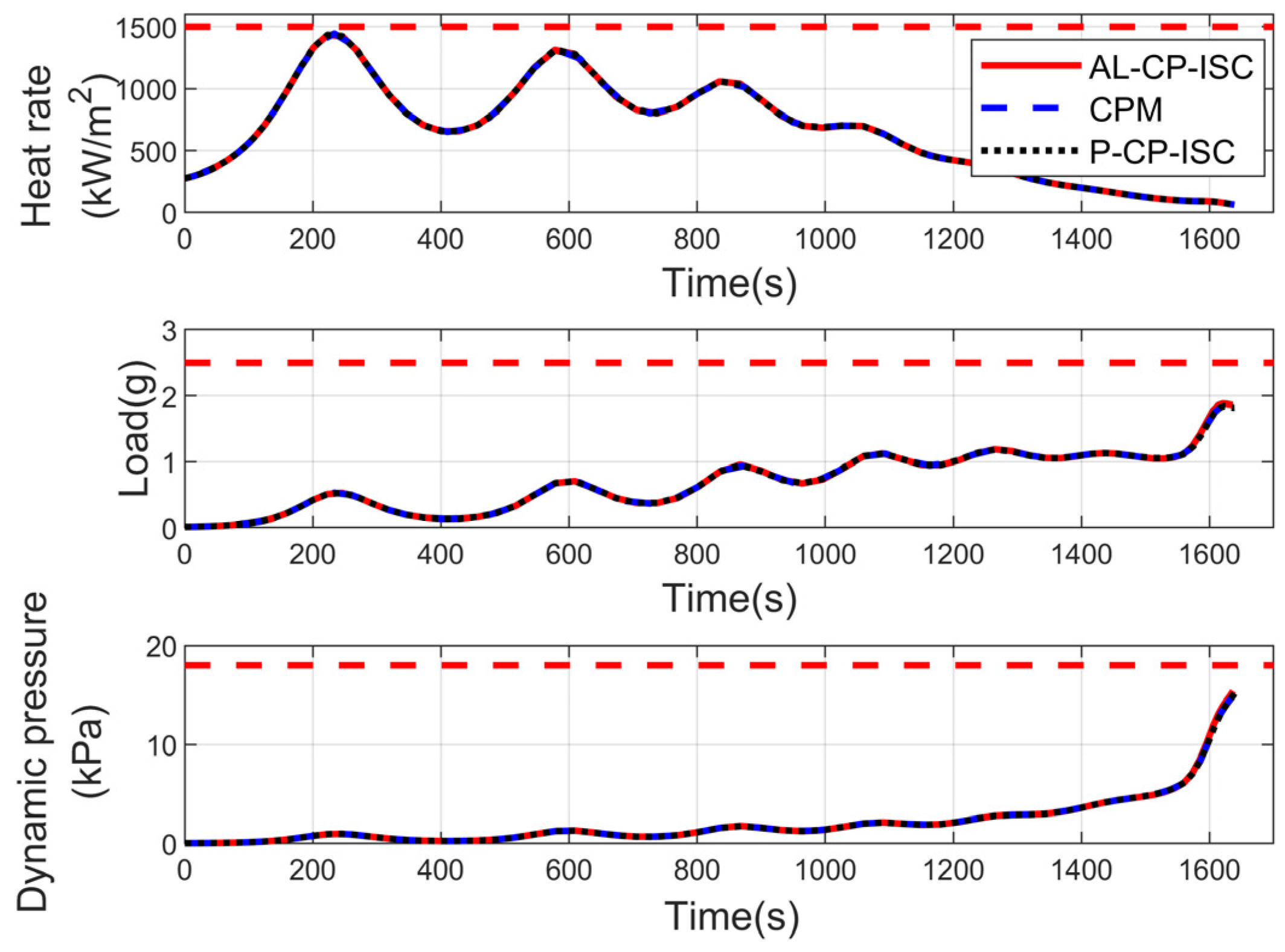
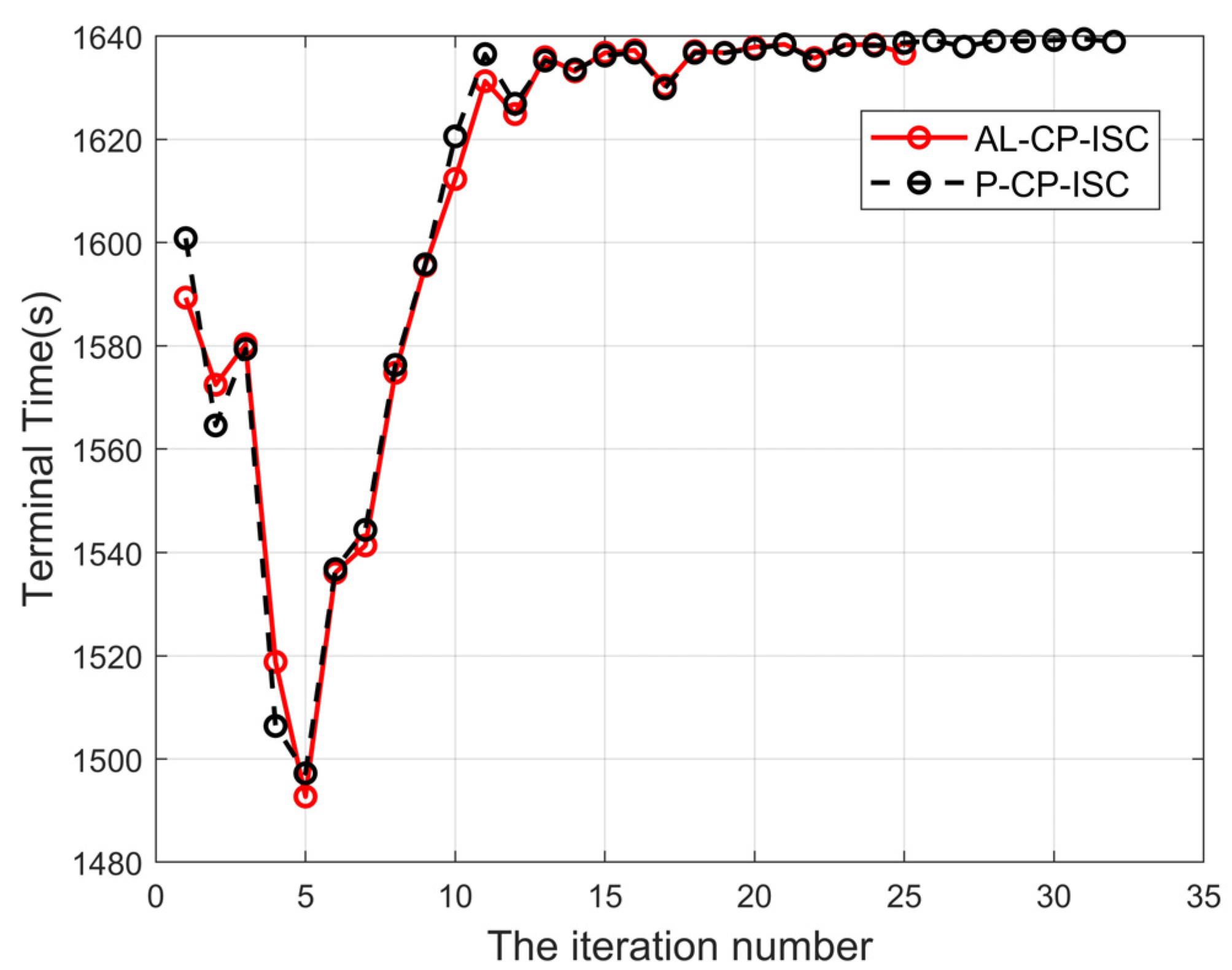
4. Numerical Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Betts, J.T. Survey of numerical methods for trajectory optimization. J. Guid. Control Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Chai, R.; Savvaris, A.; Tsourdos, A.; Chai, S.; Xia, Y. A review of optimization techniques in spacecraft flight trajectory design. Prog. Aerosp. Sci. 2019, 109, 100543. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, R.; Li, H. Mixed-integer trajectory optimization with no-fly zone constraints for a hypersonic vehicle. Acta Astronaut. 2023, 207, 331–339. [Google Scholar] [CrossRef]
- Sagliano, M.; Mooij, E. Optimal drag-energy entry guidance via pseudospectral convex optimization. Aerosp. Sci. Technol. 2021, 117, 106946. [Google Scholar] [CrossRef]
- Wang, J.; Liang, H.; Qi, Z.; Ye, D. Mapped Chebyshev pseudospectral methods for optimal trajectory planning of differentially flat hypersonic vehicle systems. Aerosp. Sci. Technol. 2019, 89, 420–430. [Google Scholar] [CrossRef]
- Mao, Y.; Zhang, D.; Wang, L. Reentry trajectory optimization for hypersonic vehicle based on improved Gauss pseudospectral method. Soft Comput. 2017, 21, 4583–4592. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Cui, N. Glide trajectory optimization for hypersonic vehicles via dynamic pressure control. Acta Astronaut. 2019, 164, 376–386. [Google Scholar] [CrossRef]
- Wang, J.; Cui, N.; Wei, C. Rapid trajectory optimization for hypersonic entry using a pseudospectral-convex algorithm. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5227–5238. [Google Scholar] [CrossRef]
- Wang, Z.; Grant, M.J. Constrained trajectory optimization for planetary entry via sequential convex programming. J. Guid. Control. Dyn. 2017, 40, 2603–2615. [Google Scholar] [CrossRef]
- Ma, Y.; Pan, B.; Hao, C.; Tang, S. Improved sequential convex programming using modified Chebyshev–Picard iteration for ascent trajectory optimization. Aerosp. Sci. Technol. 2022, 120, 107234. [Google Scholar] [CrossRef]
- Boris, B.; Alessandro, Z.; Guido, C.; Pizzurro, S.; Cavallini, E. Convex optimization of launch vehicle ascent trajectory with heat-flux and splash-down constraints. J. Spacecr. Rocket. 2022, 59, 900–915. [Google Scholar]
- Acikmese, B.; Ploen, S.R. Convex programming approach to powered descent guidance for mars landing. J. Guid. Control. Dyn. 2007, 30, 1353–1366. [Google Scholar] [CrossRef]
- Blackmore, L.; Açikmeşe, B.; Scharf, D.P. Minimum-landing-error powered-descent guidance for Mars landing using convex optimization. J. Guid. Control Dyn. 2010, 33, 1161–1171. [Google Scholar] [CrossRef]
- Wang, Z.; Grant, M.J. Optimization of minimum-time low-thrust transfers using convex programming. J. Spacecr. Rocket. 2018, 55, 586–598. [Google Scholar] [CrossRef]
- Lu, P.; Liu, X. Autonomous trajectory planning for rendezvous and proximity operations by conic optimization. J. Guid. Control Dyn. 2013, 36, 375–389. [Google Scholar] [CrossRef]
- Liu, X.; Lu, P. Robust trajectory optimization for highly constrained rendezvous and proximity operations. In Proceedings of the AIAA Guidance Navigation and Control (GNC) Conference, Boston, MA, USA, 15 August 2013; p. 4720. [Google Scholar]
- Wang, L.; Ye, D.; Xiao, Y.; Kong, X. Trajectory planning for satellite cluster reconfigurations with sequential convex programming method. Aerosp. Sci. Technol. 2023, 136, 108216. [Google Scholar] [CrossRef]
- Wang, J.; Cui, N.; Wei, C. Rapid trajectory optimization for hypersonic entry using convex optimization and pseudospectral method. Aircr. Eng. Aerosp. Technol. 2019, 91, 669–679. [Google Scholar] [CrossRef]
- Liu, X.; Shen, Z.; Lu, P. Entry trajectory optimization by second-order cone programming. J. Guid. Control Dyn. 2016, 39, 227–241. [Google Scholar] [CrossRef]
- Pei, P.; Fan, S.; Wang, W.; Lin, D. Online reentry trajectory optimization using modified sequential convex programming for hypersonic vehicle. IEEE Access 2021, 9, 23511–23525. [Google Scholar] [CrossRef]
- Fahroo, F.; Ross, I.M. Direct trajectory optimization by a Chebyshev pseudospectral method. J. Guid. Control Dyn. 2002, 25, 160–166. [Google Scholar] [CrossRef]
- Mittal, A.K.; Balyan, L.K. An improved pseudospectral approximation of coupled nonlinear partial differential equations. Int. J. Comput. Sci. Math. 2022, 15, 155–167. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, Y. Improved sequential convex programming algorithms for entry trajectory optimization. J. Spacecr. Rocket. 2020, 57, 1373–1386. [Google Scholar] [CrossRef]
- Wang, Z. Optimal trajectories and normal load analysis of hypersonic glide vehicles via convex optimization. Aerosp. Sci. Technol. 2019, 87, 357–368. [Google Scholar] [CrossRef]
- Kanzow, C.; Nagel, C.; Kato, H.; Fukushima, M. Successive linearization methods for nonlinear semidefinite programs. Comput. Optim. Appl. 2005, 31, 251–273. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer: New York, NY, USA, 1999. [Google Scholar]
- Lu, Z.; Sun, Z.; Zhou, Z. Penalty and augmented Lagrangian methods for constrained DC programming. Math. Oper. Res. 2022, 47, 2260–2285. [Google Scholar] [CrossRef]
- Liu, X.-W.; Dai, Y.-H.; Huang, Y.-K.; Sun, J. A novel augmented Lagrangian method of multipliers for optimization with general inequality constraints. Math. Comput. 2023, 92, 1301–1330. [Google Scholar] [CrossRef]
- Liu, X.; Lu, P. Solving nonconvex optimal control problems by convex optimization. J. Guid. Control Dyn. 2014, 37, 750–765. [Google Scholar] [CrossRef]
- Stanley, D.O.; Engelund, W.C.; Lepsch, R.A.; McMillin, M.; Wurster, K.E.; Powell, R.W.; Guinta, T.; Unal, R. Rocket-powered single-stage vehicle configuration selection and design. J. Spacecr. Rocket. 1994, 31, 792–798. [Google Scholar] [CrossRef]
- Andersen, E.D.; Roos, C.; Terlaky, T. On implementing a primal-dual interior-point method for conic quadratic optimization. Math. Program. 2003, 95, 249–277. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Flight Time | Solve Time | ||||||
|---|---|---|---|---|---|---|---|---|
| CPM | 1638.91 s | 25 km | 12 deg | 72 deg | 892.71 m/s | −10 deg | 90 deg | 287.8 s |
| AL-CP-ISC | 1636.68 s | 25 km | 12 deg | 72 deg | 899.36 m/s | −10 deg | 90 deg | 4.20 s |
| P-CP-ISC | 1638.94 s | 25 km | 12 deg | 72 deg | 892.63 m/s | −10 deg | 90 deg | 5.30 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Luo, Y.; Che, H.; Zhu, J.; Wang, J. A Reentry Trajectory Planning Algorithm via Pseudo-Spectral Convexification and Method of Multipliers. Mathematics 2024, 12, 1306. https://doi.org/10.3390/math12091306
Liang H, Luo Y, Che H, Zhu J, Wang J. A Reentry Trajectory Planning Algorithm via Pseudo-Spectral Convexification and Method of Multipliers. Mathematics. 2024; 12(9):1306. https://doi.org/10.3390/math12091306
Chicago/Turabian StyleLiang, Haizhao, Yunhao Luo, Haohui Che, Jingxian Zhu, and Jianying Wang. 2024. "A Reentry Trajectory Planning Algorithm via Pseudo-Spectral Convexification and Method of Multipliers" Mathematics 12, no. 9: 1306. https://doi.org/10.3390/math12091306
APA StyleLiang, H., Luo, Y., Che, H., Zhu, J., & Wang, J. (2024). A Reentry Trajectory Planning Algorithm via Pseudo-Spectral Convexification and Method of Multipliers. Mathematics, 12(9), 1306. https://doi.org/10.3390/math12091306