1. Introduction
Differential and integral operators are the basis of mathematical models, and they are also used as a means of understanding the working principles of natural and artificial systems. Therefore, differential and integral equations are of great importance both theoretically and practically. Such equations have a wide range of applications, including in the physical sciences (such as in physics and engineering) as well as in social science. Systems of differential equations, as differential equations, are often used in issues such as theories of elasticity, dynamics, fluid mechanics, oscillation, and quantum dynamics.
Interest in differential and integral operators has led to the exploration of fractional differential and integral operators by examining these issues further in depth. Owing to a question, the origin of fractional calculus arose in a message from Leibniz to L’Hôpital in 1695. Fractional calculus has received attention in recent years due to its ability to simplify numerous physical, engineering, and economics phenomena such as the fluid dynamic traffic model, damping laws, continuum and statistical mechanics, diffusion processes, solid mechanics, control theory, colored noise, viscoelasticity, electrochemistry, and electromagnetism, among others.
Because a variety of solutions of fractional differential equations (FDEs) cannot be found analytically, numerical and approximate methods are needed. There are a lot of techniques that have been studied by many researchers in solving FDEs and the system of such equations numerically. Some of these techniques are the Adomian decomposition method presented by Song and Wang [
1], the collocation method, the improved operational matrix method [
2,
3,
4], the perturbation iteration method introduced by Şenol and Dolapçı [
5], the computational matrix method illustrated by Khader et al. [
6], the differential transform method demonstrated by Ertürk and Momani [
7], the variational iteration method, the Laplace transform method given by Gupta et al. [
8], and the fractional complex transform method studied by Ghazanfari and Ghazanfari [
9], among others. Kilbas et al. [
10] inclusively examined fractional differential and fractional integro-differential equations. In addition, numerical solutions of FDEs and the system of such equations have been presented using the Legendre polynomial operational matrix method [
11], Bernstein operational matrix method [
12], Genocchi operational matrix method [
13], Jacobi operational matrix method [
14], Chebyshev wavelet operational matrix method [
15], polynomial least squares method (PLSM) [
16], Legendre wavelet-like operational matrix method (LWPT) [
17], and the Genocchi wavelet-like operational matrix method [
18].
This paper focuses on the numerical analysis of a system of fractional order differential equations using the Legendre wavelet operational matrix method. The most important advantage of the proposed method is that it presents an understandable procedure to reduce FDEs and the system of such equations to a system of algebraic equations. First, we begin by presenting some basic definitions and fundamental relations in
Section 2 and
Section 3, respectively. Then, in
Section 4, the operational matrix of the fractional derivate is natively formulated to linear and nonlinear systems of fractional differential equations.
Section 5 presents five illustrative examples that were tested with the introduced method. Finally, the last section includes the conclusions.
2. Basic Definitions
The Liouville_Caputo fractional_order derivative, shifted Legendre polynomials, and Legendre wavelets are defined below [
19,
20].
Definition 1. The Liouville_Caputo fractional derivative of is defined as [19] Some characteristics of the Liouville_Caputo fractional derivative are as follows:
where
is a constant. In addition, there is
in which
and
respectively imply that the largest integer is less than or equal to
, and the smallest integer is greater than or equal to
.
The Liouville_Caputo fractional order derivative is a linear operation of the integer order derivative
where
and
are constant.
Definition 2. Let and respectively be the parameters of dilation and translation of a single function called the mother wavelet. If and change continuously, then we obtain the following family of continuous wavelets [21,22]: Definition 3. Let imply the shifted Legendre polynomials of order . Then can be formulated as [21]and the orthogonality condition is Definition 4. Let and be any positive integer, be the order of shifted Legendre polynomials, and be the normalized time. Then the Legendre wavelets are defined on the interval by [21,22].
where . The coefficient is for orthonormality. Definition 5. Let and be functions defined over and then expanded in the terms of the Legendre wavelet as [21,22]where , in which implies the inner product. If the infinite series in Equation (9) is truncated, then it can be expressed aswhere and are matrices, as presented by 3. Fundamental Relations
Saadatmandi and Dehghan [
11] derived the operational matrix of a fractional derivative by using shifted Legendre polynomials. In this section, we show how we derived the Legendre wavelet operational matrix of fractional derivatives in some special conditions by drawing from Saadatmandi and Dehghan [
11]. Additionally, the theorem and corollary related to the Legendre wavelet operational matrix of derivatives illustrated by Mohammadi [
21] are cited here as follows.
Theorem 1. Let be the Legendre wavelet vector introduced in Equation (8). Then is expressed as [21,22]where is the operational matrix of the derivative, which can be stated aswhere is an matrix and its element is written as Corollary 1. Using Equation (12), the operational matrix for the derivative can be stated as [21]where is the power of matrix.
Lemma 1. Let be the Legendre wavelets vector introduced in Equation (8). Assuming that , then Proof. The desired result can be obtained by using Equations (2) and (4) in Equation (8). □
Theorem 2. Let be the Legendre wavelets vector introduced in Equation (8). Supposing that and , thenwhere is the operational matrix of the fractional derivative of the order in the Liouville_Caputo sense and can be stated aswhere is written asConsider in that the first rows are all zero.
Proof. Presume that
is the
element of the vector
introduced in Equation (11), where
. Then
can be stated as
Accepting that
, and by using the shifted Legendre polynomial, we obtain
If we use Equations (3), (4), and (21), then we have
Approximating
by
terms of the Legendre wavelets, then we obtain
where
Utilizing Equations (22) and (24), we get
in which
is presented in Equation (19). In addition, if we use Lemma 1, then we can write
Combining Equations (25) and (27), the result can be obtained. □
4. Solving Systems of Fractional Order Differential Equations
In this section, the Legendre wavelet operational matrix method was implemented to obtain the numerical solution of the system of fractional order differential equations. Consider a system of fractional differential equations as follows:
where
is a linear/nonlinear function of
is the derivative of
with the order of
in the Liouville–Caputo sense and
, and they are subjected to the initial conditions
First of all, approximating
and
, we obtain
where
is an unknown vector and
is the vector introduced in Equation (8). If we utilize Equation (17), then we have
Substituting Equations (29) and (30) into Equation (27), we obtain
If
is a linear function of
then we produce
linear equations by implementing
Also, by substituting the initial conditions in Equation (28) into Equation (30), then we obtain
A set of linear equations is generated by combining Equations (32) and (33). The solution of these linear equations can be obtained for unknown coefficients of the vector . Consequently, , introduced in Equation (27), can be computed.
If is a nonlinear function of then we first compute at points and, for a better result, use the first roots of shifted Legendre . Then these equations, collectively with Equation (33), produce nonlinear equations. The solution of these nonlinear equations can be obtained by employing Newton’s iterative method. Consequently, , introduced in Equation (27), can be computed.
5. Illustrative Examples
In this section, to show the applicability and powerfulness of the introduced method, we present the solutions to five linear and nonlinear systems of fractional order differential equations.
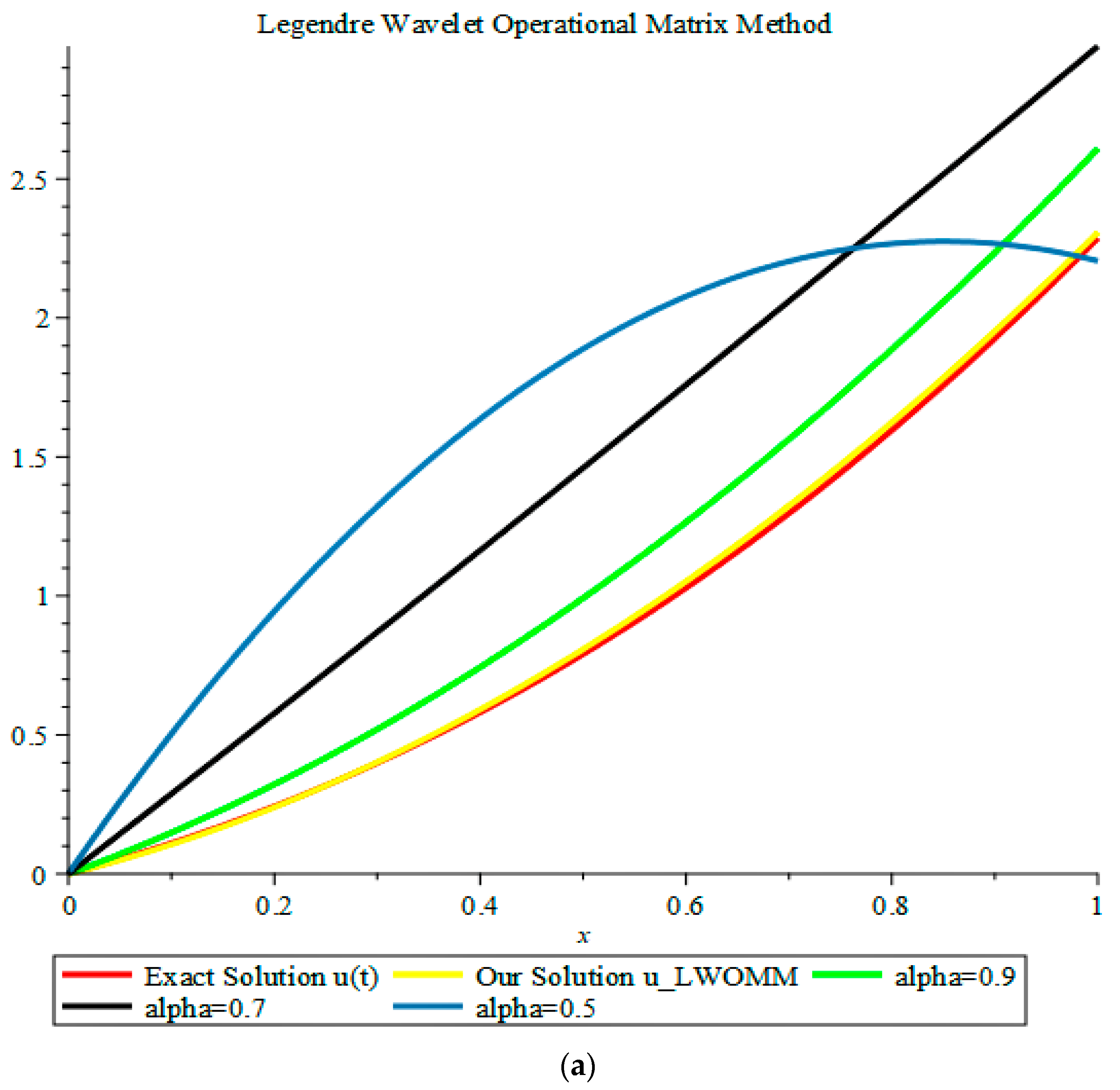
Example 1. We first considered the following linear system of fractional differential equations [7,8]:subject to The exact solution of this system when is known to be This example was examined for
,
, and
. When the obtained results were matched against the exact solution when
, as demonstrated in
Figure 1, we can clearly observe that when
approached 1, our results approached the exact solution. We also solved this problem by using Legendre polynomial operational matrix method (LPOMM), and we compared the results with the LWOMM. The numerical computations for
u(
t) and
v(
t) when
are revealed in
Table 1 and
Table 2.
Example 2. We considered the following nonlinear system of fractional differential equations [13]: The exact solution of this system is known to be
Using the parameters
and
, we applied both the proposed method and the LPOMM to solve this problem and show that our approach is more efficient and useful. Our numerical results supported the idea that our solution approaches the exact solution more than the approximate solution LPOMM. Comparisons of the approximate and exact solutions are presented in
Table 3 and
Table 4.
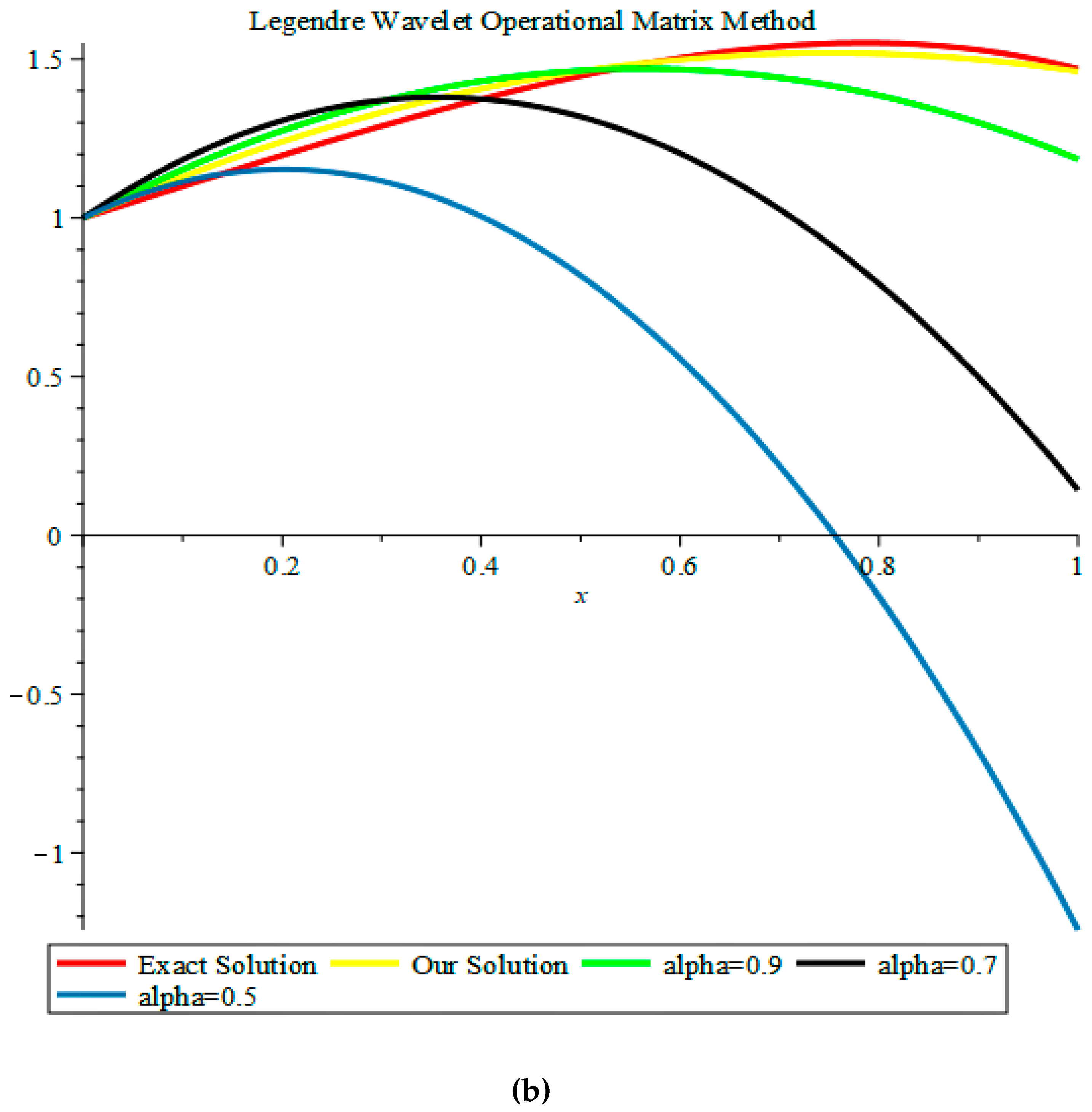
Example 3. We considered the following nonlinear system of fractional differential equations with the initial conditions [8] The exact solution of this system when
is known to be
The parameters
, and
were utilized. A comparison of our results and the exact solution when
is displayed in
Figure 2. The figures support that when
approximated 1, our results approximated the exact solution. We also solved this problem by using the LPOMM, and compared the results to the LWOMM. Finally, we present the numerical computations for
u(
t) and
v(
t) when
in
Table 5 and
Table 6.
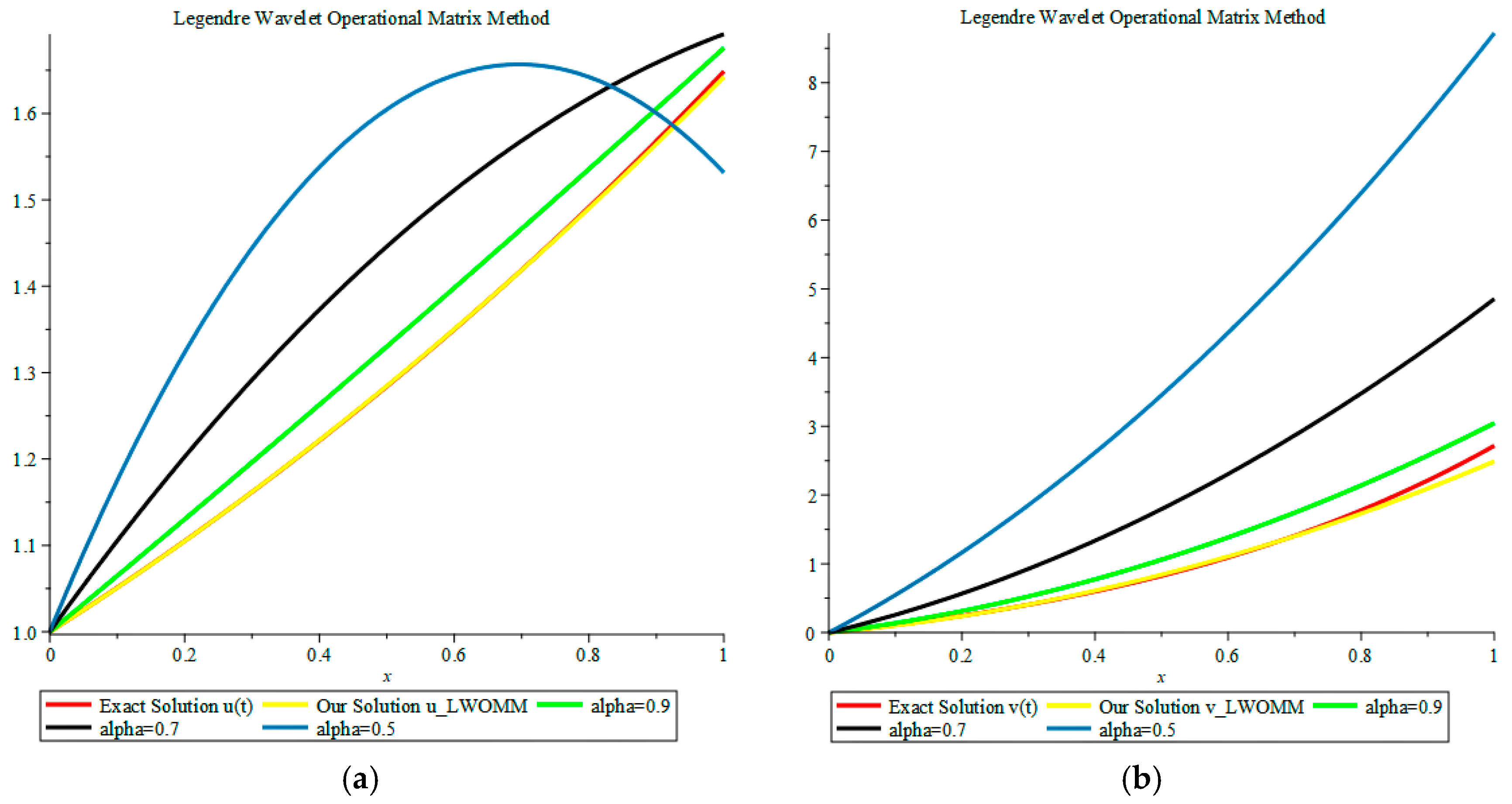
Example 4. We considered the following nonlinear system of FDEs with initial conditions [13] The exact solution of this system when
is known to be
This example was analyzed for
,
, and
. When the obtained results were matched against the exact solution when
, as demonstrated in
Figure 3, we can clearly observe that when
approached 1, our results approached the exact solution. We also solved this problem by using the LPOMM, and compared the results with the LWOMM. The numerical computations for
u(
t) and
v(
t) when
are also revealed in
Table 7 and
Table 8.
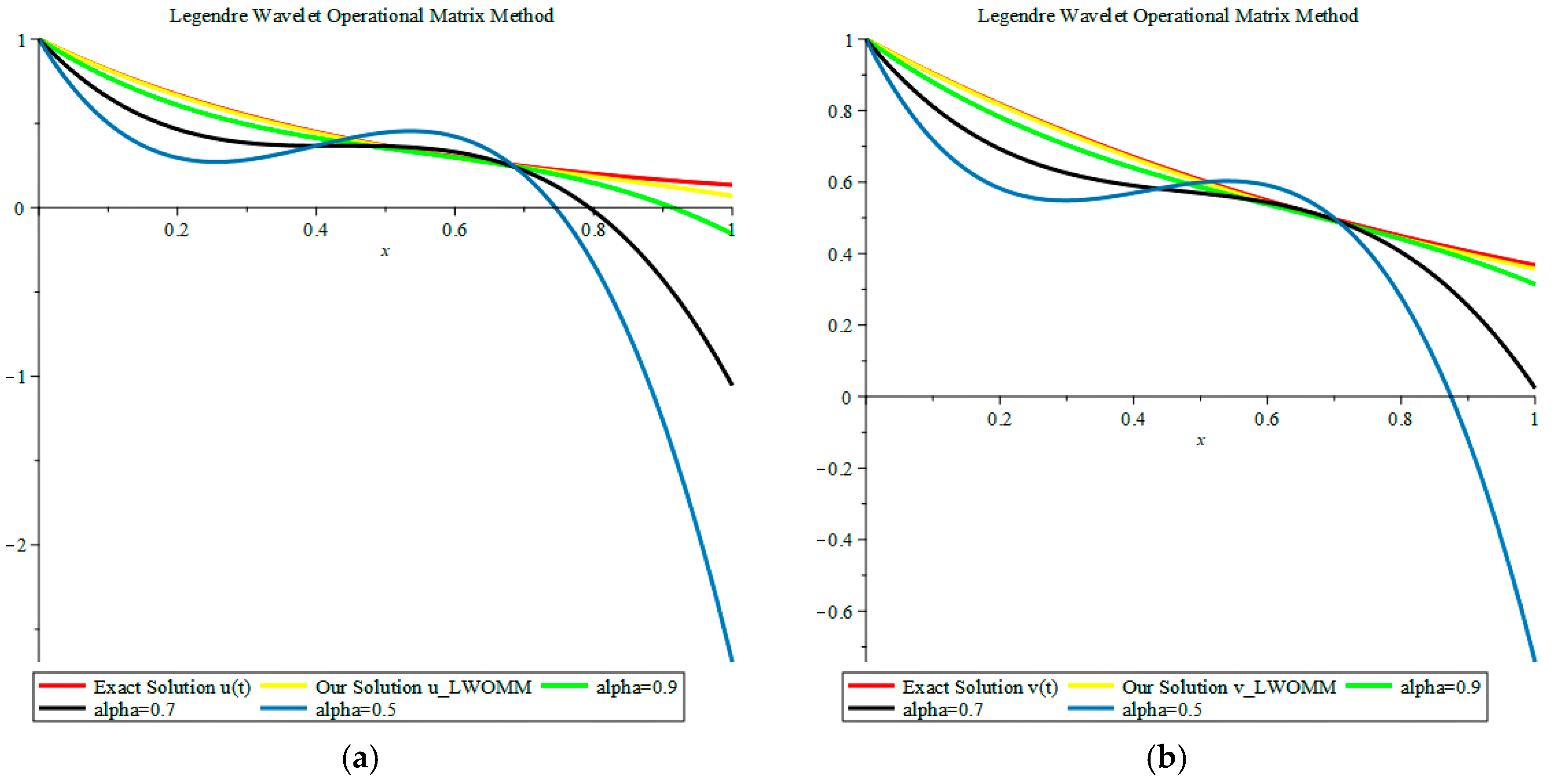
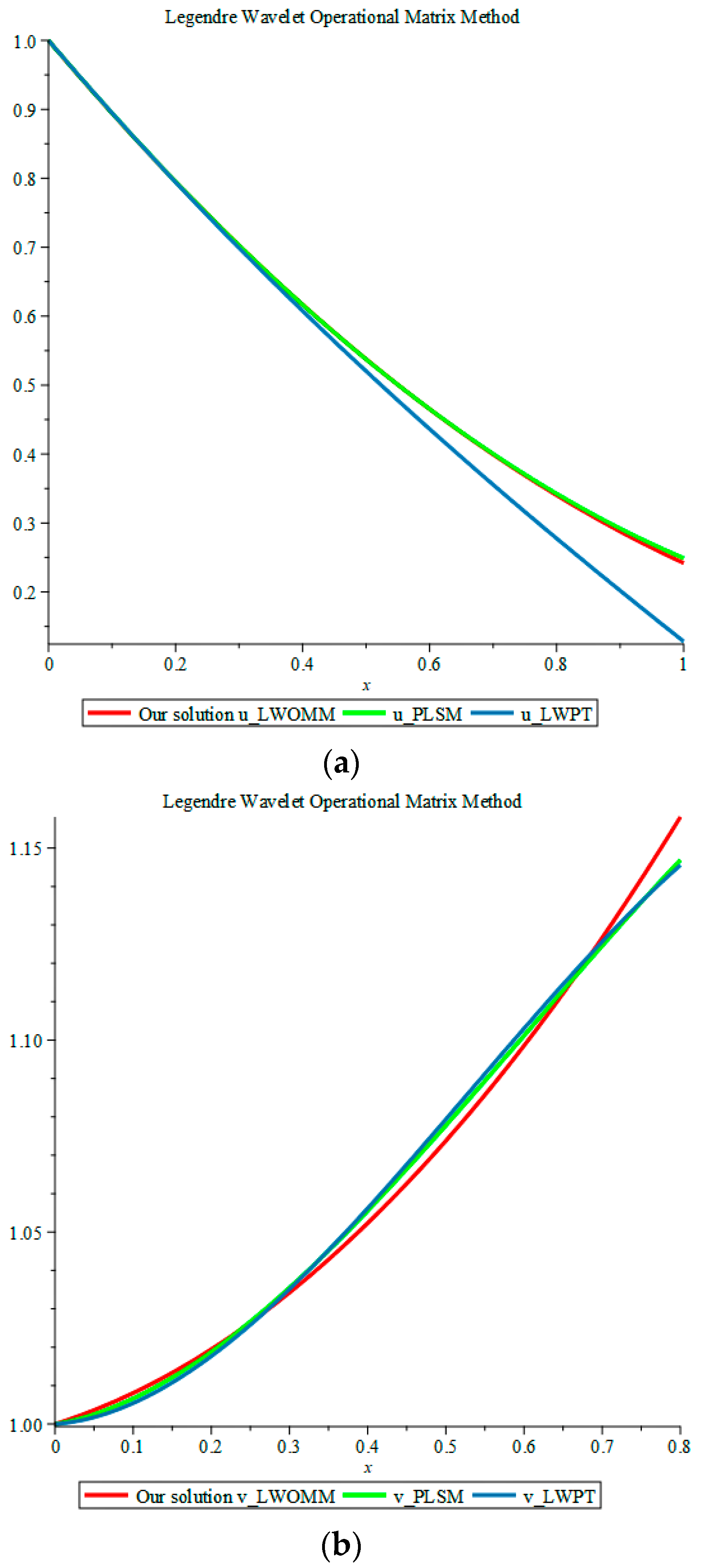
Example 5. We considered the following fractional order Brusselator system [16,17]: The approximate solutions of this system when
and
were presented by Chang and Isah using the LWPT [
17] and by Bota and Caruntu using the PLSM [
16]. These solutions when
are given by
The parameters
,
, and
were used. A comparison of our results to the approximate solutions introduced by Bota and Caruntu [
16] and Chang and Isah [
17] when
is displayed in
Figure 4. Finally, we also present the numerical computations for
u(
t) and
v(
t) when
in
Table 9 and
Table 10.
6. Conclusions
In this paper, a system of fractional_order differential equations was examined by drawing from a new operational matrix of the fractional derivative in some special conditions. We also systematized a very operational algorithm in order to attain the solution of the linear and nonlinear systems of fractional differential equations in Maple. All numerical results and graphical presentations generated by Maple affirmed that the Legendre wavelet operational matrix method is very effective and applicable. As the next step, the method introduced in this paper can be applied to fractional partial differential equations and the system of such equations, fractional integral equations and the system of such equations, and fractional integro-differential equations. These equations are at least as important as fractional differential equations and they are very significant in science, engineering, and technology.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}