Abstract
Let be a simple closed k-curves with l elements in and be an m-iterated digital wedges of , and be an alignment of fixed point sets of W. Then, the aim of the paper is devoted to investigating various properties of . Furthermore, when proceeding with this work, this paper addresses several unsolved problems. To be specific, we firstly formulate an alignment of fixed point sets of , denoted by , where is an odd natural number and . Secondly, given a digital image with , we find a certain condition that supports . Thirdly, after finding some features of , we develop a method of making perfect according to the (even or odd) number l of . Finally, we prove that the perfectness of is equivalent to that of . This can play an important role in studying fixed point theory and digital curve theory. This paper only deals with k-connected digital images such that .
Keywords:
digital wedge; alignment; perfect; k-contractibility; digital k-curve; fixed point set; digital image; digital topology MSC:
47H10; 54H30; 68U03
1. Introduction
Let (resp. ) represent the set of integers (resp. natural numbers), and be the n times Cartesian product of , . Besides, let (resp. ) be the set of even (resp. odd) natural numbers. Digital geometry mainly deals with discrete objects in from the viewpoints of digital k-curve and digital k-surface theory, where the k-adjacency means the digital k-connectivity of (see (2.1) in Section 2).
Let be the category consisting of the set of digital images , denoted by , and the set of k-continuous maps of , denoted by (for more details see Section 2). Motivated by the study of homotopy fixed point sets in Reference [1], we are recently interested in the set of cardinal numbers of fixed point sets of all k-continuous maps of a digital image [2,3] because this topic can be used in studying some “motions of a rigid body with a fixed point” [4,5] from the viewpoint of digital geometry. To be specific, given a digital image in , a paper [2] explored some features of (k-homotopy) fixed point sets related to this issue in a setting. Then, the authors of Reference [2] used the terminology, “fixed point spectrum” denoted by . However, a recent paper [3] changed the term “spectrum” into “alignment” because the term “spectrum” has been used in the field of functional analysis as a very popular and important notion related to the bounded or unbounded liner operator [6]. Indeed, the “alignment” of a fixed point sets in Reference [3] is considered to be a digital image with 2-adjacency (see Definition 4) instead of only a set [2], which appears a little bit difference between them.
For a digital image , let and . Besides, we will denote the cardinality of a set X with . In addition, we use the notation “” for introducing a new terminology. Then, with the following setting (for more details see Section 3)
we will take the notation for brevity. In particular, this paper explores some conditions supporting the perfectness of because the notion of perfectness can play an important role in mechatronics and digital geometry.
A recent paper [7] proved that a k-isomorphism preserves a k-homotopy, a k-homotopy equivalence, k-contractibility (for more details see Theorem 2 and Corollaries 1 and 2 of Reference [7]). This finding can facilitate fixed point theory and homotopy theory in a setting. Given a simple closed k-curve with l elements in , denoted by , we proved that is perfect if and only if is k-contractible [3]. Although Reference [2] formulated for the case of , we need to improve it. Indeed, we can further consider it for the case of (for more details see Lemma 2 in this paper). Concretely, given , we can formulate without any limitation of l of . With this approach, the following queries can be raised.
- (Q1)
- Given with , under what condition does the set have both the elements and ?
Indeed, this issue plays an important role in studying .
Let us now denote the m-iterated digital wedge of with , (for more details see Section 2 in the present paper). Up to now, in digital geometry there is no research of the fixed point sets of , where . After formulating for the case of , given a number l which is either even or odd, we may raised he following queries (see Remark 1).
- (Q2)
- How can we establish ?
- (Q3)
- How many 2-components are there in ?
- (Q4)
- Are there some relationships among the numbers m, l, and the perfectness of ?
- (Q5)
- Given a simple k-path with a length d, what conditions make perfect?
- (Q6)
- How can we formulate ?
- (Q7)
- Is a digital k-homotopy invariant?
- (Q8)
- Are there certain relationships between the perfectness of and that of ?
The rest of the paper is organized as follows: Section 2 recalls basic backgrouds and some properties related to the study of fixed points of digital images as well as the multiplicative property of a digital fundamental group [8,9]. Section 3 explores a condition that makes perfect. In particular, given with , we will propose a certain condition of which contains both the elements and . Indeed, this finding strongly facilitates examining if is perfect. Section 4 proves that is perfect if and only if . Besides, we prove that has two 2-components if and only if . Section 5 begins with , where . Then, it investigates some properties of for the case , . Besides, after joining a simple k-path onto W to produce a digital wedge with a k-adjacency, denoted by , we prove that is perfect if and only if , where d is the length of P. Finally, we investigate a certain condition that makes perfect, . In particular, is proved not to be a digital k-homotopy invariant. Section 6 expands the obtained results associated with of in Section 4 and Section 5 into the cases of which l is odd and . Section 7 concludes the paper and refers to a further work.
2. Preliminaries
A pair consisting of a set and a certain k-adjacency of was initially called a digital image, [10,11]. After that, Reference [12] firstly generalized this approach into the high dimensional digital image with one of the k-adjacency relations of . To study in a setting, , the following digital k-adjacency (or digital k-connectivity) was taken in Reference [12] (see also Reference [13]), as follows:
For a natural number t, , the distinct points
are -adjacent if at most t of their coordinates differ by and the others coincide.
According to this approach, the -adjacency relations of , are formulated [12] (see also Reference [13]) as follows:
For instance, we obtain the following [12,13]:
Using these k-adjacency relations of of (1), , we will call a digital image on , . Besides, these k-adjacency relations can be essential for studying digital products with normal adjacencies [9,12] and calculating digital k-fundamental groups of digital products [9,12] (see Theorem 2 in this paper). For with , the set with 2-adjacency is called a digital interval [14,15].
Using a digital k-adjacency of , we observe that a digital image is a digital space [16] (see also Reference [7]). Hereafter, is assumed in , with one of the k-adjacency of (1). Let us recall some terminology, notions, and backgrouds need for this study [8,10,11,12,14,15].
- Assume with . Then, by a k-path with elements in X we means the sequence such that and are k-adjacent if [15].
- We say that is k-connected if for any distinct points there is a k-path in X such that and (for more details see Reference [7]). Besides, a singleton set is assumed to be k-connected (for more details see Reference [7]).
- Given a digital image , by the k-component of , we mean the maximal k-connected subset of containing the point x [15].
- By a simple k-path from x to y in , we mean the finite set such that and are k-adjacent if and only if , where and [15]. Then, the length of this set is denoted by .
- A simple closed k-curve (or simple k-cycle) with l elements in , denoted by [12,15], , is defined to be the set such that and are k-adjacent if and only if . Then, the number l of depends on both the dimension n of and the k-adjacency (for details, see Remark 1). Hereafter we use the notation to abbreviate .
Remark 1.
Let us investigate how the number l of is taken. According to the k-adjacency of , that is, of (1), we observe that the number l of is determined, as follows:
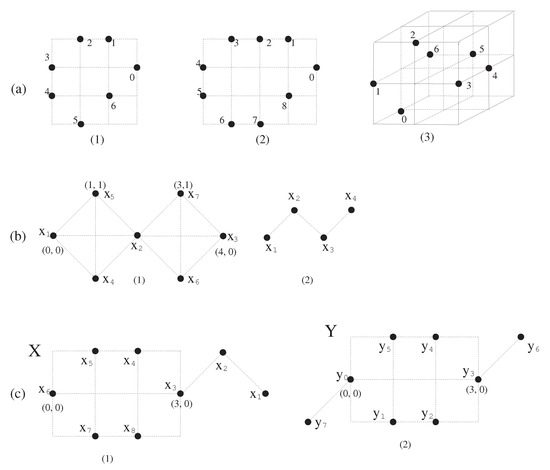
(Case 1) In the case , according to the notion of , it is clear that the number l should be an even number . For instance, let us consider , and , .
(Case 2) In view of the concept of , it is obvious that no exists. For instance, neither nor exists. However, the existence of depends on both k and n. To be precise, the number of depends on the situation. For instance, while we can take , no exists.
(Case 3) In the case , as to , if , then it is clear that the number l can be even or odd (see Figure 1a). For instance, consider , , and (see Figure 1a (1)–(3)). In general, and are considered depending on the dimension , and . In addition, is admissible. For instance, consider , , and so on.
Figure 1.
(a) (1) (2) (3) . (b) (1) [3] (2) A simple 8-path with the length 3, where . (c) (1) Digital wedge , where is a simple 8-path with the length 2. (2) Digital wedge , where each of and is a simple 8-path with the length 1.
Owing to Remark 1, in terms of the number l of , the following properties of are observed.
For instance, we can consider , , , and so on. Hereafter, regarding l of , we will follow the property (2).
Given and a point , the following notion of “digital k-neighborhood of with radius 1” is defined, as follows [12]:
For more general cases of , see References [7,12]. The digital -continuity of a map in Reference [11] can be represented by using the k-neighborhood in (3), as follows:
Proposition 1.
[12] A function is (digitally) -continuous if and only if for every , .
In Proposition 1, in the case , the map f is called a ‘k-continuous’ map to abbreviate the -continuity of the given map f. Using the digital continuity of maps between two digital images, let us recall the category DTC consisting of the following two pieces of data [12], called the digital topological category, as follows:
The set of , where , as objects of DTC denoted by ;
For every ordered pair of objects , the set of all -continuous maps between them as morphisms of DTC, denoted by .
In DTC, for the case , we will use the notation DTC(k).
In some literature, since there is a certain confusion of characterizing both a k-path and a -continuous map, we need to confirm some difference between them, as follows:
Remark 2.
Given a k-path on , we may establish a -continuous map whose image of by f is considered to be the given k-path, that is, as a sequence with . However, given a -continuous map , not every image by the given map f as a sequence, that is, the sequence , is always a k-path on (see the notion of k-path in the previous part) because some of the points and can be equal. Of course, depending on the situation, based on this sequence , we can take a k-path as a subsequence of .
To compare digital images up to similarity, we often use the notion of a -isomorphism (or k-isomorphism), as follows:
Definition 1.
[8] (-homeomorphism in Reference [17]) Consider two digital images and in and , respectively. Then, a map is called a -isomorphism if h is a -continuous bijection and further, is -continuous. Then, we use the notation . In the case , the map h is called a k-isomorphism.
Let us now recall the notions of a digital wedge which can be used in studying fixed point sets from the viewpoint of digital geometry. Given two digital images and , a digital wedge, denoted by , is initially defined [8,12] as the union of the digital images and (for more details see Figure 1, Figure 2, Figure 3 and Figure 4), where
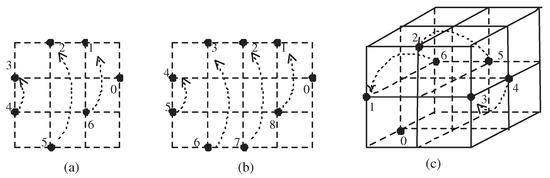
Figure 2.
Configuration of for the particular cases given in Example 1, where l is odd. (a) Regarding , we observe . (b) Concerning , we see . (c) Regarding , we find .
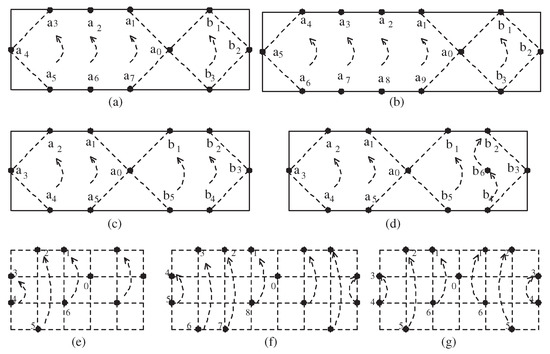
Figure 3.
(a) [3] whose digital 8-fundamental group is isomorphic to and is perfect. (b) [3] whose digital 8-fundamental group is isomorphic to and is perfect. (c) is not perfect. (d) Configuration of is perfect, where . In particular, while is not 8-contractible, is perfect. (e) is perfect. (f) is not perfect. (g) is not perfect.
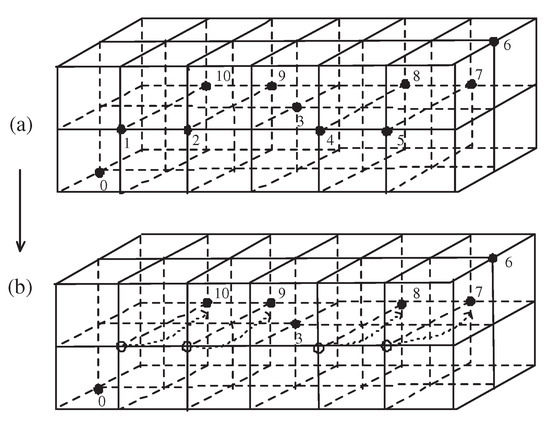
Figure 4.
Explanation of the process of obtaining the numbers (see (20)–(26). Establishment of a simple 26-path from the given digital wedge (see .
- (1)
- is a singleton, say .
- (2)
- and are not k-adjacent, where two sets and are said to be k-adjacent if and there are at least two points and such that a is k-adjacent to b [14].
- (3)
- is k-isomorphic to and is k-isomorphic to (see Definition 1).
When studying digital wedges in a setting, we are strongly required to follow this approach. Besides, might be considered to be . Indeed, this digital wedge is quite different from the classical one point union (or wedge) in typical topology [18] and standard graph theory [19] by the k-adjacency referred to in (2) above.
A digital topological version of the strong graph adjacency of a product of two typical graphs [20] was initially developed in Reference [12]. It is called a normal adjacency of digital product [8]. Indeed, this notion is strongly related to the calculation of digital fundamental groups of digital products [9] and further, an automorphism group of a digital covering space of a digital product [9] (see Theorem 2 and Corollary 1 below).
Motivated by the pointed digital k-homotopy in References [21,22] (see also Reference [17]), the concept of k-homotopy relative to a subset is established, as follows:
Definition 2.
[12,17] Let and be a digital image pair and a digital image in and , respectively. Let be -continuous functions. Suppose there exist and a function such that
- (1)
- for all and ;
- (2)
- for all , the induced function given by for all is -continuous.
- (3)
- for all , the induced function given byfor all is -continuous; Then, H is said to be a -homotopy between f and g [17].
- (4)
- Furthermore, for all , for all and for all [12].
Then, we call H a -homotopy relative to A between f and g, and f and g are said to be -homotopic relative to A in Y, in symbols [12].
In Definition 2, if , then we say that F is a pointed -homotopy at [17]. In the case and , we call a k-homotopy to abbreviate -homotopy. If, for some , is k-homotopic to the constant map in the space X relative to , then is said to be pointed k-contractible [17].
Based on this k-homotopy, the notion of digital homotopy equivalence firstly introduced in Reference [23], as follows:
Definition 3.
[23] Given two digital images and , if there are k-continuous maps and such that the composite is k-homotopic to and the composite is k-homotopic to , then the map is called a k-homotopy equivalence and is denoted by . Besides, is said to be k-homotopy equivalent to . If the identity map is k-homotopy equivalent to a certain constant map , we say that is k-contractible. In particular, in the case and , the map h is called a -homotopy equivalence.
With the several concepts such as digital k-homotopy class [21,22], Khalimsky operation of two k-homotopy classes [21], trivial extension [17], Reference [17] defined the digital k-fundamental group, denoted by . Also, we have the following: If X is pointed k-contractible, then it is clear that is a trivial group [17]. Using the homotopy lifting theorem, and the unique digital lifting theorem [12], we obtain the following [12]:
Theorem 1.
[12] (1) For a non-k-contractible , is an infinite cyclic group.
(2) For two non-k-contractible spaces , is a free group with two generators of which they have infinite orders.
For instance, is a free group with two generators, .
Given two digital images in , consider the digital product in . For every point , if there is a k-adjacency of (see (1)) such that , then we say that the k-adjacency for is C-compatible [9]. Since both the k-fundamental group and the k-contractibility of a digital image are so related to the study of (see Theorem 4), we need to recall the following properties.
Theorem 2.
[9] Assume that is a simple closed -curve with elements in , and they are not -contractible. If there is a C-compatible k-adjacency of its digital product , then the k-fundamental group is isomorphic to .
Theorem 2 strongly facilitates the classification of digital covering spaces [12], as follows:
Corollary 1.
[9] Assume a digital product with a C-compatible k-adjacency. Let be a radius 2--covering map, , where and . Then, the automorphism group is isomorphic to the group .
3. Existence of a Perfect Alignment of Fixed Point Sets
This section explores some conditions that make an alignment of fixed point sets of a digital image 2-connected (or perfect). As usual, we say that a digital topological property is a property of a digital image which is invariant under digital k-isomorphisms. As mentioned in the previous part, this paper takes the notation to highlight the set of k-continuous self-maps of , as follows:
where Using the set in (4), we define the following:
Definition 4.
[3] Given , is said to be an alignment of fixed point sets of .
A paper [2] only used the notation as just a set without the 2-adjacency. In Definition 4, we remind that the pair is assumed to be a digital image with 2-adjacency as a subset of .
Definition 5.
[3] Given , if , then (or for brevity) is said to be perfect.
This notion can play an important role in studying motions of rigid objects with fixed points in the field of robotics.
Theorem 3.
In , is a digital topological property [2,3].
Proof.
For two k-isomorphic images and , since we have (see Corollary 4.4 of Reference [2]), the proof is completed. ☐
Given , we obviously obtain the following:
Lemma 1.
(1) [2,3].
(2) [3].
(3) For , [2].
(4) In the case , .
References [2,3] (or arXiv version of [2]) studied only for the case of even number l (see Lemma 1). After recalling Remark 1, let us now formulate for an odd number l of .
Lemma 2.
For an odd number l of , , that is, .
Proof.
Regarding the assertion, it is clear that
because only a singleton digital image has the fixed point property [11,24] (for more details see Remark 10 of [7]), a constant map is also a k-continuous map, and the identity map of is obviously a k-continuous self-map of . Thus, it suffices to consider certain k-continuous self-maps f of such that , that is, . Then, this set should be a certain k-path which is not a simple k-cycle (or a certain simple closed k-curve) on . More precisely, consider the map (see Figure 2)
defined by
Then, this map f is a k-continuous self-map of such that (see (6) with Proposition 1), where . In view of Proposition 1, the image by the map proposed in (6) has the maximal number of the set (for instance, see Figure 2a–c)
Namely, we obtain
Indeed, for each number , it is clear that there are many types of k-continuous self-maps g of depending on the number l such that
By (5), (7), and (8), we conclude that . ☐
Example 1.
(1) . To be precise, for convenience, let us consider the self-map f of in Figure 2a with . Then, regarding , according to the map in (6), consider the map
Then, it is clear that f is an 8-continuous map with . Similarly, for any , we can have another several 8-continuous self-maps g of such that . Hence we have because it is clear that .
Similarly, we obtain the following:
For a digital image which is k-connected and , it is clear that [2] and further, by Lemmas 1 and 2, and the property (2), we obtain the following: For any l of and of ,
In (9)(2), the set need not be a subset of . For instance, and . Besides, using Lemma 1(3) and Lemma 2, we observe .
Given with , we need to check if there is the number . Indeed, a paper [2] studied this property with the following lemma (see Lemma 4.8 of Reference [2]).
Lemma 3.
[2] Let X be connected with . Then, if and only if there are distinct points with .
Unlike the notations and in Lemma 3, in digital topology we have ordinarily used the following notations: For a given digital image , using the digital k-connectivity of (1), we are used to take the following notations [11,12,14]. According to the literature, for , we recall the notations [11,12,14]
- (1)
- ;
- (2)
- ;
- (3)
- (see the notation in (3)); and
- (4)
- We may represent of (3) above in such a way that
, that is, the notation of of (3).
The notations and in Lemma 3 are defined, as follows:
A recent paper [3] contains some incorrect part in Remark 3 of Reference [3]. Indeed, the remark was based on the preprint posted in arXiv “Fixed point sets in Digital topology, 1(2019), 1-25” which is the preprint version of Reference [2]. Then, there was not any introduction of and in this preprint. With the notion in (10), the current version of Lemma 3 above is correct anyway (disregard the lines 4–11 from the bottom of the page 11 of Reference [3]). But, owing to the unusual notations of and in Lemma 3, a reader can invoke some confusion. Thus, after following the standard notations referred to in (1)–(4) above, we can avoid some potential confusion. Thus, we had better follow the popular and standard notations as stated in (1)–(4) above to finally obtain the following representation of Lemma 3.
Lemma 4
(Representation of Lemma 3). Let be k-connected with . Then, if and only if there are distinct points with .
Remark 3.
Unlike Lemma 1(3), using Lemma 2, we can deal with , . For insance, we obtain .
Since the notion of k-retract also play an important role in studying , let us now recall it, as follows: For , we say that is a k-retract of [17] if there is a k-continuous map such that for any , . Then, we call the map r a k-retraction from onto .
As mentioned in Section 2, the notion of k-contractibility of strongly contributes to the study of . Indeed, the following 6-contractibility of the given digital image in Lemma 5 has been often used in digital topology [7,24]. To be precise, given a digital image with , in order to examine if belongs to , Reference [2] has used the following property.
Lemma 5.
[7,24] Let be the digital unit cube with 6-adjacency. Then, it is 6-contractible.
To be specific, though is 6-contractible, it is clear that [2]. However, we need to point out that the 6-contractibility of this 3-dimensional digital cube was already proven in References [7,24] (see Theorem 2.6(1) of Reference [24] and Remark 2(2) of Reference [7]).
Since each of , , , and , plays an important role in digital topology (see Theorem 1), let us intensively explore alignments of the fixed point sets of them, for example,
As a representation of Lemma 1 of Reference [3], for any l of we obtain the following (see Remark 1):
Theorem 4.
is perfect if and only if is trivial.
Proof.
Using “Contrapositive law”, let us suppose that is not trivial. Then, by Theorem 1, it is obvious that is not k-contractible. Namely, by Remark 1, we obtain at least . In this case, by Lemmas 1(3) and 2, we need to consider the following two cases:
(Case 1) In the case l is even, by Lemma 1(3), we obtain . Hence, if , then is not perfect because (see the difference between and l in Lemma 1(3)).
(Case 2) In the case l is odd, by Lemma 2, we have . Hence, if , then is not perfect because (see the difference between and l).
Conversely, if is trivial, by Theorem 1, we obtain . For instance, we can see the cases , , and . Thus, by Theorem 1 and Lemma 1, we clearly obtain which is perfect. ☐
By Theorem 4, it is clear that is perfect if and only if . Using Lemmas 3 and 4, we obtain the following result which can play an important role in investigating the perfectness of .
Lemma 6.
Given which is k-connected, assume that there are two distinct points such that . Then, we obtain the following:
- (1)
- is k-connected.
- (2)
- is a k-retract of .
Proof.
In the case , the proof is straightforward because a singleton is k-connected (for more details see the notion of k-disconnectedness of Reference [7]). Thus, we may assume .
(1) With the hypothesis “”, using “Reductio ad Absurdum”, let us suppose that is not k-connected. Then, there are non-empty sets (for details see the notion of k-disconnectedness in Reference [7]) such that
Then, there are at least two points such that because is k-connected. Owing to the hypothesis “”, each and should be in . Then, owing to the condition (11), we have a contradiction.
For instance, see the cases in Figure 1b(1)–(2). To be specific, see the two points and in Figure 1b(1) and the two points and in Figure 1b(2) which support this assertion.
(2) With the hypothesis, let us consider the map
defined by
Then, by Proposition 1, with the hypothesis of this theorem we obtain
Thus, r is a k-continuous map such that , where is the restriction of the map r to the given set A. Hence r is a k-retraction from onto . ☐
Lemma 7.
[2] Let be a k-retract of . Then, .
When investigating the perfectness of a given digital image, we need the following assertion which answers to the question .
Theorem 5.
Let be k-connected with . If there are three or four distinct points such that and further,
then, .
Proof .
(Case 1) With the hypothesis of (1) of (13), we prove the assertion. By Lemmas 3 and 4, owing to the hypothesis , it is clear . Furthermore, in , owing to the hypothesis that there are certain two points in such that
by Lemmas 4 and 6(1), we obtain because . Owing to the hypothesis , by Lemma 6(2), we see that is a k-retract of . Furthermore, by Lemma 7, we also obtain so that both and belong to .
(Case 2) With the hypothesis of (2) of (13), we prove the assertion. By Lemmas 3 and 4, owing to the hypothesis , it is clear that . Furthermore, in , owing to the hypothesis that there are two distinct points in such that , by Lemmas 4 and 6, we obtain because . Owing to the condition that , by Lemma 6(2), we see that is a k-retract of . Then, by Lemma 7, we conclude that both and belong to . For instance, see the cases in Figure 1b(1) and (2) and Figure 3b(1) and (2). ☐
Example 2.
(1) For any , we now confirm that (see (8) of Reference [3])
has at least the elements because there are at least three points in that satisfies the condition (1) of (13) and For instance, consider the case in Figure 3a. Then, we obtain that has at least the elements because there are at least three points in that satisfies the condition (1) of (13) and
(2) By Lemmas 2, 3, and 4, since does not have the number 15 (see Figure 3f), we conclude that is not perfect.
(3) By Theorem 5, we obtain .
Remark 4.
The two conditions (1) and (2) of Theorem 5 are independent.
Proof.
Let us consider the two digital images and with in Figure 1c. Then, by Lemma 1(3) and Theorem 5, we see that
Naively, each and are perfect so that the numbers belong to .
For , since there are the three points , and in X such that
Hence satisfies the condition (1) of Theorem 5. However, it is clear that does not satisfy the condition (2) of Theorem 5.
Meanwhile, let us now consider the case in Figure 1c(2). Then, there are the following four points in Y such that
Besides, it is clear that this does not satisfy the condition (1) of Theorem 5. ☐
Remark 5.
The converse of Theorem 5 does not hold.
Proof.
Let in Figure 1c(1). Naively, consider in Figure 1c(1). Then, by Lemmas 1(3) and 4, and we also have so that it is clear that because . However, the digital image does not satisfy both of the conditions (1) and (2) of Theorem 5. For instance, in , while there are points such that , there are no points satisfying either the condition (1) or the condition (2) of (13) in Theorem 5. Namely, does not satisfies each of the conditions (1) and (2) of (13). ☐
Owing to Theorem 5, the following is obtained:
Corollary 2.
Given with , if there is a set with such that
Then, .
Example 3.
(1) Given a simple k-path with , we obtain .
(2) Let . Then, as stated in Example 2(3), which is perfect.
(3) Let be a digital wedge of some simple k-paths. Then, is perfect.
4. Formulation of
This section initially formulates . Then, the following queries are naturally raised (see (Q2) and (Q3)).
(4-1) Under what conditions is perfect ?
(4-2) How many 2-components are there in ?
Since the exploration of the perfectness or non-perfectness of
and plays an important role in digital geometry, this section intensively studies this topic and its generalization. In particular, we prove that is perfect if and only if . Besides, we prove that has two 2-components if and only if , as follows:
Theorem 6.
For , .
Proof.
Though there are many kinds of k-continuous self-maps f of , regarding , it suffices to consider only the maps f such that
- (a)
- ; or
- (b)
- ; or
- (c)
- ; or
- (d)
- f does not have any fixed point of it, where means the restriction function f to the given set A.
Firstly, from (a), since has the cardinality , using Lemma 1(3), we have
Secondly, from (b), using Lemma 1(3), we obtain
Thirdly, from (c)–(d), we have
After comparing the three numbers , , and from (15)–(17), we conclude that
☐
By Theorem 6, the following is obtained.
Theorem 7.
(1) For , is perfect if and only if .
(2) For , has two 2-components if and only if .
Proof.
(1) Let us now take the difference from (18)
From (19), if , then the perfectness of holds. Thus, we obtain the following: is perfect if and only if .
(2) In (19) above, count on the case , that is, . In view of (18), we conclude that has the two 2-components and in the digital image if and only if . ☐
By Theorems 6 and 7, we obtain the following:
Example 4.
(1) which is not perfect.
(2) has two 2-components which is not perfect.
(3) has two 2-components, which is not perfect.
(4) has two 2-components, which is not perfect.
Using the property of (18), with the property (2), we obtain the following:
Theorem 8.
If , then .
Before proving this theorem, we need to point out that this formulation of in this assertion holds for . More precisely, for the case is already stated in Lemma 1(3). As a generalized case of , for the only case , we now prove the assertion. Hence we will prove this assertion by using “transfinite induction” for .
Proof .
(Step 1) In the case , for convenience, let and and , that is, . Regarding , it is sufficient to consider the following k-continuous self-maps f of .
According to (20), we now investigate with the following three cases.
Firstly, according to (20)(1) and (2), by Lemma 1(3), we obtain
Secondly, according to (20)(3), we have
Based on this case, we obtain seven types of 26-continuous self-maps of such that .
Thirdly, according to (20)(4), we obtain
Hence, owing to these three subsets from (21), (22), and (23) as subsets of , we obtain
(Step 2) In the case (see Theorem 6), using a method similar to the consideration of (20) and further, following a certain procedure similar to (21)–(23), we obtain
Thus, using Lemma 1(3) (see also (Step 1) above) and the properties of (24) and (25), we obtain the following.
By transfinite induction for , from (26) we obtain
☐
As mentioned in the earlier part, the formula of (27) also holds for (see Lemma 1(3)).
Corollary 3.
If , then the cardinality of is equal to .
5. Perfectness of , Where is a Simple -Path and
This section initially formulates both and
, where is a simple k-path and . To proceed with this work, first of all we need to investigate a certain condition that makes perfect, . In the case , we already mentioned that is perfect if and only if (see Lemma 1 and Theorem 4). Motivated by Theorem 8, we obtain the following:
Theorem 9.
In the case , is perfect if and only if .
Proof.
From (27), take the difference between the two numbers and , that is,
Indeed, the quantity in (28) plays a crucial role in investigating cardinalities of the fixed point sets of in . According to the numbers m and l, based on the difference in (28), if , that is, , then we obtain the following:
is perfect if and only if . ☐
By Theorem 9, for the case it turns out that is not 2-connected. Thus, we now address the query (Q5) stated in Section 1. Before dealing with (Q5), we need to remind the following feature which can play a crucial role in addressing the query (Q5) and study from the viewpoint of digital geometry.
Remark 6.
According to (28), given , regardless of the number of m of the given m-iterated digital wedge of , the difference of (28) is constant. Thus, the perfectness of is equivalent to that of .
Motivated by Theorems 6, 7, and 9, after joining a simple k-path onto to produce a digital wedge with the k-adjacency, we investigate a certain condition that makes perfect, as follows:
Theorem 10.
In the case , is perfect if and only if , where is a simple k-path and d is the length of P.
Proof.
From (28), if , that is, , then
is 2-connected and further, the converse also holds. Thus, we complete the proof. ☐
Using Theorems 7 and 9, let us now investigate a certain condition that makes perfect.
By Lemma 6 and Theorems 5 and 9, since is perfect, we prove the following:
Theorem 11.
In the case , is perfect if and only if .
Before proving this assertion, in the case , we recall that the assertion obviously holds (see (18)).
Proof.
By Theorem 5, it is clear that is perfect. Naively, we have (see Example 2(3))
because the cardinality of is . With the property (28) of Theorem 9, owing to the inequality , that is, , since , we have the following:
is perfect () if and only if . ☐
Example 5.
(1) In the case , is perfect.
(2) In the case , is perfect.
As a general case of Theorem 11, the following is obtained.
Theorem 12.
In the case , is perfect if and only if .
Proof.
From (28), if , that is, , then we obtain is perfect. Besides, the converse also holds. ☐
Remark 7.
The obtained results from Theorems 9, 10, 11, and 12 are independent from the given k-adjacency.
Definition 6.
A property P of digital images is called a “digital k-homotopy property” (or k-homotopy invariant) provided that it is preserved by all digital k-homotopy equivalences.
To be precise, a certain property P is a digital k-homotopy property if and only if, for an arbitrary k-homotopy equivalence , that has P implies that also has P.
Proposition 2.
is not a digital k-homotopy invariant.
Proof.
As a counterexample, consider the two digital images and in Figure 1c(2). Though they are 8-homotopy equivalent, their alignments of the fixed point sets of them are different, as follows:
so that . ☐
6. For an Odd Number , Characterization of
As mentioned in (2), since no exists, in this section we are only interested in the number of . Unlike the study of preceded in Section 4 and Section 5, this section studies for the case that l is odd instead of even, that is, (see Remark 1 and the property (2)). Then, Lemma 2 plays a crucial role in proceeding with this work. Thus, first of all, let us compare the two assertions in Lemmas 1 and 2.
Remark 8.
Given , according to the two numbers or in Lemmas 1 and 2, we obtain the following:
(Case 1) In the case (see Lemma 1), we have
(Case 2) In the case (see Lemma 2), we have
Thus, we see that these two alignments of the given and have the same cardinality ‘’. However, we observe some difference between them from Case 1 and Case 2. To be precise, let us count on the two differences
from the above two alignments of the given fixed point sets of and . Depending on the choice of or , we have the corresponding differences “” or “a” as stated in (29), respectively. This observation also plays an important role in studying or comparing the two cases of according to the choice of or .
As mentioned in Remark 1, to characterize , we need to consider the case because no exists.
Theorem 13.
If and ,then .
Before proving the assertion, regarding , we need to follow the property (2).
Proof.
Using Lemma 2 and a method similar to the proof of Theorem 8, we prove the assertion. To be precise, for the case we have already stated in Lemma 2. As a generalized case of , for the only case , we now prove the assertion. Hence we will prove this assertion by using “transfinite induction” for .
(Step 1) In the case , let and and , that is, (see Figure 3g as an example). Regarding , motivated by the method of (20), it suffices to consider the following k-continuous self-maps f of .
According to (30), we now investigate with the following three cases.
Firstly, according to (30)(1) and (2), by Lemma 2, we obtain
Secondly, according to (30)(3), we have
because (see Lemma 2).
For instance, consider an 8-continuous self-map f of in Figure 3g such that for each subset of
so that we obtain .
With this approach, we obtain several types of 8-continuous self-maps of such that .
Thirdly, according to (30)(4), we obtain
Hence, owing to these three sets from (31), (32), and (33) as subsets of , we obtain
(Step 2) In the case , using a method similar to the consideration of (30) and further, following a certain procedure similar to (31)–(33), we obtain
Thus, using Lemma 2 (see also (Step 1) above) and using several properties similar to the properties of (31), (32), and (33), we we obtain the following.
By transfinite induction for , from (36) we obtain
☐
Example 6.
.
Remark 9.
After comparing (27) and (37), we have the different types of alignments of depending on the number l which is either even or odd.
Corollary 4.
In the case , is not perfect.
Proof.
By Remark 1, Lemma 2, and (37), the proof is completed because . ☐
Example 7.
Using the properties (2) and (3) of (36), by Theorem 13, we obtain the following:
- (1)
- , which is not perfect.
- (2)
- , which is perfect.
- (3)
- , which is not perfect.
- (4)
- , which is not perfect.
From (6.9), let us take the difference between and , that is,
This quantity is essential to studying the perfectness of , where is a certain simple k-path. In view of (37) and (38), we obtain the following:
Corollary 5.
For , has two 2-components.
Proof.
In view of (38), has two 2-components if and only , that is, . Since no exists, only for , the assertion holds. ☐
Theorem 14.
In the case , is perfect if and only if .
Proof.
By Theorem 5, it is clear that is perfect (see Example 2(3)). Naively, we have
because the cardinality of is . Withe the property (38), owing to the inequality , that is, , we have the following:
is perfect if and only if . ☐
Example 8.
(1) In the case , is perfect.
(2) In the case , is perfect.
Remark 10.
According to (38), given , regardless of the number of m of the given m-iterated digital wedge of , the difference of (38) is constant. Thus, the perfectness of is equivalent to that of .
As a general case of Theorem 14, the following is obtained.
Theorem 15.
In the case , is perfect if and only if .
Proof.
From (38), by Remark 1, we obtain that is perfect if and only , that is, . ☐
Theorem 16.
In the case , is perfect if and only if , where is a simple k-path and d is the length of P.
Proof.
From (38), we obtain that is perfect if and only if , that is, . ☐
7. Conclusions and a Further Work
We have addressed eight issues raised in Section 1, which can facilitate studying fixed point theory in a setting. Section 3 and Section 4 formulated for the case l of is an odd number, which can be strongly used in studying for a digital image . Besides, we developed several methods of finding elements of . One of the important things is that given with , we were able to establish a certain condition of which has both the elements and . In Section 5 and Section 6, we expanded the obtained results in Section 3 and Section 4 to develop many new results. On top of this, we have intensively studied various properties of , where
according to the numbers and l which can be either even or odd.
We now conclude that is formulated without any limitation of the number l of . Given a digital image , a method of determining is established. Thus, by Theorems 10, 11, 13, and 14, for a certain digital wedge , it turns out that there is a method of making perfect. Besides, by Theorems 12, 15, and 16, it also turns out that the perfectness of is equivalent to that of . Eventually, the obtained results can be applied to the fields of chemistry, physics, computer sciences and so on. In particular, this approach can be extremely useful in the fields of classifying molecular structures, computer graphics, image processing, approximation theory, game theory, mathematical morphology [25], optimization theory, digitization, robotics, information processing, rough set theory, and so forth.
As a further work we need to study fixed point sets from the viewpoint of digital surface theory based on the literature [25,26,27,28,29,30].
Funding
The author was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (2019R1I1A3A03059103). Besides, this research was supported by ‘Research Base Construction Fund Support Program funded by Jeonbuk National University in 2020’.
Conflicts of Interest
The author declares no conflict of interest.
References
- Szymik, M. Homotopies and the universal point property. Order 2015, 32, 30–311. [Google Scholar] [CrossRef]
- Boxer, L.; Staecker, P.C. Fixed point sets in digital topology, 1. Appl. Gen. Topol. 2020, 21, 87–110. [Google Scholar] [CrossRef]
- Han, S.-E. Digital topological properties of an alignment of fixed point sets. Mathematics 2020, 8, 921. [Google Scholar] [CrossRef]
- El-Sabaa, F.; El-Tarazi, M. The chaotic motion of a rigid body roating about a fixed point. In Predictability, Stability, and in N-Body Dynamical Systems, NATO ASI Series, NSSB; Plenum Press: New York, NY, USA, 1991; Volume 272, pp. 573–581. [Google Scholar]
- Verkhovod, Y.V.; Gorr, G.V. Precessional-isoconic motion of a rigid body with a fixed point. J. Appl. Math. Mech. 1993, 57, 613–622. [Google Scholar] [CrossRef]
- Hazewinkel, M. Spectrum of an operator. In Encyclopedia of Mathematics; Springer Science + Business Med. B.V./Kluwer Academic Publisher: Berlin, Germany, 1994; ISBN 978-1-55608-101-4. [Google Scholar]
- Han, S.-E. Digital k-Contractibility of an n-times Iterated Connected Sum of Simple Closed k-Surfaces and Almost Fixed Point Property. Mathematics 2020, 8, 345. [Google Scholar] [CrossRef]
- Han, S.-E. Non-ultra regular digital covering spaces with nontrivial automorphism groups. Filomat 2013, 27, 1205–1218. [Google Scholar] [CrossRef]
- Han, S.-E. Compatible adjacency relations for digital products. Filomat 2017, 31, 2787–2803. [Google Scholar] [CrossRef]
- Rosenfeld, A. Digital topology. Amer. Math. Mon. 1979, 86, 76–87. [Google Scholar] [CrossRef]
- Rosenfeld, A. Continuous functions on digital pictures. Pattern Recognit. Lett. 1986, 4, 177–184. [Google Scholar] [CrossRef]
- Han, S.-E. Non-product property of the digital fundamental group. Inf. Sci. 2005, 171, 73–92. [Google Scholar] [CrossRef]
- Han, S.-E. Estimation of the complexity of a digital image form the viewpoint of fixed point theory. Appl. Math. Comput. 2019, 347, 236–248. [Google Scholar]
- Kong, T.Y.; Rosenfeld, A. Digital topology: Introduction and survey. Comput. Vision Graph. Image Process. 1989, 48, 357–393. [Google Scholar] [CrossRef]
- Kong, T.Y.; Rosenfeld, A. Topological Algorithms for the Digital Image Processing; Elsevier Science: Amsterdam, The Netherland, 1996. [Google Scholar]
- Herman, G.T. Oriented surfaces in digital spaces. CVGIP Graph. Model. Image Process. 1993, 55, 381–396. [Google Scholar] [CrossRef]
- Boxer, L. A classical construction for the digital fundamental group. J. Math. Imaging Vis. 1999, 10, 51–62. [Google Scholar] [CrossRef]
- Munkres, J.R. Topology A First Course; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1975. [Google Scholar]
- Shee, S.-C.; Ho, Y.-S. The coriality of one point union of n-copies of a graph. Discret. Math. 1993, 117, 225–243. [Google Scholar] [CrossRef]
- Berge, C. Graphs and Hypergraphs, 2nd ed.; North-Holland: Amsterdam, The Netherland, 1976. [Google Scholar]
- Khalimsky, E. Motion, deformation, and homotopy in finite spaces. In Proceedings of the IEEE International Conferences on Systems, Man, and Cybernetics, Boston, MA, USA, 20–23 October 1987; pp. 227–234. [Google Scholar]
- Khalimsky, E. Pattern analysis of n-dimensional digital images. In Proceedings of the IEEE International Conferences on Systems, Man, and Cybernetics, Atlanta, GA, USA, 14 October 1986; pp. 1559–1562. [Google Scholar]
- Han, S.-E. On the classification of the digital images up to a digital homotopy equivalence. J. Comput. Commun. Res. 2000, 10, 194–207. [Google Scholar]
- Han, S.-E. Fixed point theorems for digital images. Honam Math. J. 2015, 37, 595–608. [Google Scholar] [CrossRef]
- Kiselman, C.O. Digital Geometry and Mathematical Morphology; Lecture Notes; Uppsala University, Department of Mathematics: Uppsala, Sweden, 2002; Available online: www.math.uu.se/kiselman (accessed on 10 August 2020).
- Bertrand, G.; Malgouyres, M. Some topological properties of discrete surfaces. J. Math. Imaging Vis. 1999, 20, 207–221. [Google Scholar] [CrossRef]
- Chen, L. Digital and Discrete Geometry, Theory and Algorithm; Springer: Berlin, Germany, 2014; ISBN 978-3-319-12098-0. [Google Scholar]
- Bertrand, G. Simple points, topological numbers and geodesic neighborhoods in cubic grids. Pattern Recognit. Lett. 1994, 15, 1003–1011. [Google Scholar] [CrossRef]
- Malgouyres, R.; Lenoir, A. Topology preservation within digital surfaces. Graph. Model. 2000, 62, 71–84. [Google Scholar] [CrossRef]
- Morgenthaler, D.G.; Rosenfeld, A. Surfaces in three dimensional digital images. Inf. Control 1981, 51, 227–247. [Google Scholar] [CrossRef]




© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).