Abstract
There is no doubt that the fourth-order King’s family is one of the important ones among its counterparts. However, it has two major problems: the first one is the calculation of the first-order derivative; secondly, it has a linear order of convergence in the case of multiple roots. In order to improve these complications, we suggested a new King’s family of iterative methods. The main features of our scheme are the optimal convergence order, being free from derivatives, and working for multiple roots . In addition, we proposed a main theorem that illustrated the fourth order of convergence. It also satisfied the optimal Kung–Traub conjecture of iterative methods without memory. We compared our scheme with the latest iterative methods of the same order of convergence on several real-life problems. In accordance with the computational results, we concluded that our method showed superior behavior compared to the existing methods.
Keywords:
King’s method; nonlinear equations; optimal iterative methods; multiple roots; Kung–Traub conjecture MSC:
65G99; 65H10
1. Introduction
The most demanding task of science and engineering problems [1,2,3] is to find the solutions of nonlinear equations. Most of the time, these are complicated or unsolvable when using analytical methods. Therefore, this leads to the construction of iterative techniques that provide an approximate solution. Many higher order schemes [4,5] with certain conditions have been proposed by researchers to solve a nonlinear function . Along with the simple roots of nonlinear equations, multiple roots of nonlinear equations play a significant role in many areas such as the Ideal Gas Law [6], which describes the nature of a real gas and the relation between molecular size and attraction forces. Taking this into consideration, we focused on the study of multiple roots of function such that and , where is the exact root of function f with multiplicity m.
The most popular and classical method for multiple roots is Newton’s modified method [7,8], defined as:
where is the derivative of the function . With multiplicity known in advance, its order of convergence is quadratic. Later, some authors [9,10,11,12,13,14,15,16] constructed higher order methods to solve the multiple root scalar equation taking Newton’s modified method as a base step and using some weight functions. The major drawback of these schemes is the computation of the first-order derivative at each step, which consumes much time. To reduce this complexity, researchers [17,18,19,20,21,22] have worked on derivative-free schemes of multiple roots of scalar equations with the concept of the divided difference introduced by Traub–Steffensen [4]:
where is any finite real number. Hueso et al. [17] developed a fourth-order derivative-free technique to find the multiple roots of nonlinear equations. Here, the authors approximated the first-order derivative with the divided difference operator as:
where .
In 2020, Kumar et al. [18] and Sharma et al. [19,20,21] constructed derivative-free methods of second-order, fourth-order, and eighth-order convergence, respectively. Recently, Behl et al. [6] proposed an optimal derivative-free Chebyshev–Halley family for multiple roots of a nonlinear equation. This scheme utilized three functional evaluations, one weighted function , and one parameter to obtain the fourth-order convergence. Besides, the mentioned methods are optimal, which means the order of convergence is , where n represents the number of function evaluations per iteration, known as the Kung–Traub conjecture [23]. Keeping all the above-mentioned facts in mind, we focused on the construction of the well-known King’s optimal higher order family. The main significance of King’s family is that it is completely derivative free and preserves the same fourth order of convergence as in the case of simple roots. The present work is organized as follows: The second section explains the convergence of the iterative formula. The third section demonstrates the numerical work. Lastly, Section 4 presents the concluding remarks.
2. Construction of the Higher Order Scheme
Here, we constructed an optimal fourth-order family of King’s method [7,8] for multiple zeros with a simple and compact body structure, which is defined by:
where is any finite real number and is the known multiplicity of the required zero. In addition, is the finite difference of order one . Moreover, is a single variable function with two multi-valued functions and . Suppose their principal analytic branches (see [24]) as a principal root given by , with for . The choice of for agrees with that of to be employed later in the numerical experiments of the section. We have in an analogous way . It is important to note that the proposed scheme (4) can be reducedto the well-known King’s method for and .
In Theorems 1–3, we illustrate that the constructed scheme (4) attains the maximum fourth-order convergence for all , without adopting any supplementary evaluation of the function or its derivative.
Theorem 1.
Suppose is multiple solutions of multiplicity of function f. Consider that function is analytic in surrounding the required zero . Then, the presented scheme (4) has fourth-order convergence, when:
and satisfies the following error equation:
where
Proof.
Let us consider that and are the error in the pth iteration and the asymptotic error constant numbers, respectively. Now, we adopted Taylor’s series expansions for the functions and around with the assumption and , which are given by:
and:
respectively.
By using Expressions (6) and (7) in the first substep of Scheme (4), we obtained:
Expression (8) and Taylor series expansion led us to:
By adopting Expressions (6), (7), and (9), we obtained:
and:
Expression (10) demonstrates that is of order one (). Then, we have:
We obtained the following expression by inserting Equations (6)–(12) in Scheme (4):
where . For example, , , etc.
From Expression (13), we deduced that Scheme (4) reaches at least second-order convergence, if:
Adopting Expression (14) and we obtained:
which further gives:
By inserting Expressions (14) and (16) in , we have:
which further leads to:
Next, by inserting (14), (16), and (18) in (13), we obtained:
where . Hence, the scheme (4) has fourth-order convergence for . □
Theorem 2.
Adopting the same hypotheses of Theorem 1, then the proposed scheme (4) has fourth-order convergence for when:
It satisfies the following error equation:
Proof.
We adopted Taylor’s series expansions for the functions and around with the assumptions and , which are defined as follows:
and:
where are asymptotic error constant numbers.
By using Expressions (20) and (21) in the first substep of Scheme (4), we have:
Expression (22) and Taylor series expansion lead to:
By adopting Expressions (20), (21), and (23), we obtained
and:
Expression (25) demonstrates that is of order one (). Then, we have:
We have the following expression by inserting Equations (20)–(26) in Scheme (4):
where . For example, , , etc.
From Expression (27), we deduced that Scheme (4) reaches at least second-order convergence, if:
Adopting Expression (28) and we obtained:
which further gives:
By inserting Expressions (28) and (30) in , we have:
which further leads to:
Next, by inserting (28), (30), and (32) in (27), we obtained:
Hence, Scheme (4) has fourth-order convergence for . □
Theorem 3.
Adopting the same hypotheses of Theorem 1, then the proposed scheme (4) has fourth-order convergence for provided:
It satisfies the following error equation:
Proof.
Let us consider that and are the error in the pth iteration and asymptotic error constant numbers, respectively. Now, we adopted Taylor’s series expansions for the functions and around with the assumption and , which are given respectively by:
and:
where . For example, the first coefficient is explicitly written as , , etc.
By adopting Expressions (34) and (35) in the first substep of Scheme (4), we obtained:
Expression (36) and Taylor series expansion lead to:
From Expressions (34), (35), and (37), we obtained:
and:
Expression (39) demonstrates that is of order one (). Then, we have:
We have the following expression by inserting Equations (34)–(40) in Scheme (4):
where . For example, , , etc.
From Expression (41), we deduced that Scheme (4) reaches at least second-order convergence, if:
Adopting Expression (42) and we obtained:
which further gives:
By inserting Expressions (42) and (44) in , we have:
which further leads to:
Next, by inserting (42), (44), and (46) in (41), we obtained:
Hence, Scheme (4) has fourth-order convergence for . □
3. Numerical Experimentation
Here, we present the results of the proposed derivative-free iterative methods named as and , respectively, in comparison to existing derivative-free methods. Several numerical examples were tested to verify the results. We considered the following derivative-free techniques developed by Hueso et al. [17], Sharma et al. [19], and Sharma et al. [20], respectively, for the comparisons.
Hueso et al.’s scheme ():
where:
Note that for the value of q is considered as one, and for other values of m, q is taken as two.
Sharma et al.’s scheme ():
where:
Sharma et al.’s scheme ():
where:
All the numerical results were performed with the software Mathematica 10 using 3000 multiple precision digits of the mantissa after the first four iterative procedures. To check the better performance of the proposed method, we displayed the errors between two consecutive iterations , the absolute residual error at the th iteration, and the approximate computational order of convergence (ACOC), denoted as , in Table 1, Table 2, Table 3, Table 4 and Table 5. The starting point is indicated in each example, and the final results depended on this initial guess, but were similar when we were in a neighborhood of the exact solution, such as the local convergence studies in iterative methods have confirmed. The following formula was used to evaluate the ACOC:
Note that the expression represents in all the tables.
Example 1.
Here, we considered the famous van der Waals equation of an ideal gas [6] that represents the nature of a real gas on the basis of parameters of a particular gas.
The parameters and T were also evaluated with terms a and b. Therefore, we have the following nonlinear equations in terms of the volume of gas , which is represented as x by:
The desired zero is of multiplicity . Table 1 depicts the performance of different iterative schemes with initial guess . The proposed methods , and converged to the root much faster than the other derivative-free methods , and .

Table 1.
Numerical results of function .
Table 1.
Numerical results of function .
| Schemes | |||||
|---|---|---|---|---|---|
Example 2.
Next, we tested the proposed scheme on Planck’s radiation equation, which determines the spectral density of electromagnetic radiation released by a black body at a given temperature and at thermal equilibrium [25] as:
where T, y, k, h, and c denote the absolute temperature of the black-body, the wavelength of the radiation, Boltzmann’s constant, Planck’s constant, and the speed of light in a medium (vacuum), respectively. The wavelength y was determined by the maximum energy density , that is , resulting in the following equation.
The nonlinear equation was formulated by taking as:
In order to obtain the approximated zero of multiplicity , one can easily find the wavelength y from the relation . Planck’s problem was tested with initial guess , and the results are demonstrated in Table 2.
Table 2.
Numerical results of function .
Table 2.
Numerical results of function .
| Schemes | |||||
|---|---|---|---|---|---|
Example 3.
Another application of nonlinear equations is the characteristic equations of a large matrix [6] to find the eigenvalues. The determination of the roots/eigenvalues of such higher order characteristic equations is a difficult task if we apply the linear algebra approach. Therefore, one of the best ways is to use the numerical techniques. Here, we considered the following square matrix of order nine:
then the characteristic equation was formulated into a nonlinear equation as:
The zero of is with multiplicity . Table 3 depicts the better performance of the proposed schemes in comparison with existing techniques by taking initial guess .
Table 3.
Numerical results of function .
Table 3.
Numerical results of function .
| Schemes | |||||
|---|---|---|---|---|---|
Example 4.
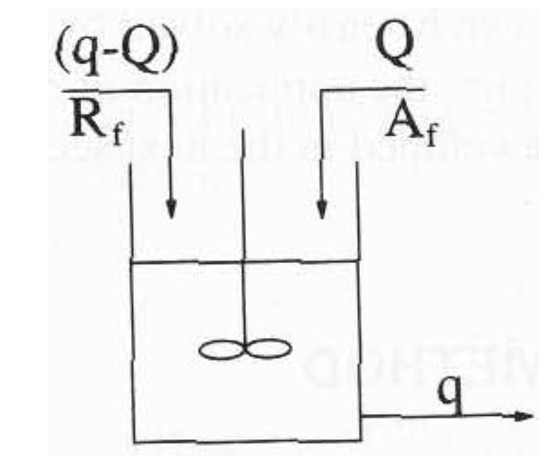
Now, we considered the problem of a continuous stirred-tank reactor [26] shown in Figure 1.
Figure 1.
Continuous stirred-tank reactor.
Here, components A and R are fed to the reactor at rates Q and , respectively. The reaction schemes developed in this reactor are:
;
;
;
;
Douglas [27] converted this problem into a mathematical expression:
where is the gain of the proportional controller. This control system is stable for the values of . If we take , we obtain the poles of the open-loop transferred function as the solutions of the following univariate equation:
The function has three zeros, , and , where the root has multiplicity . The computation results are demonstrated in Table 4 on initial guess . It can be concluded that the results were better for the suggested methods in terms of less residual and functional error with a similar utilization of the number of iterations for the methods developed by , and .
Table 4.
Numerical results of function .
Table 4.
Numerical results of function .
| Schemes | |||||
|---|---|---|---|---|---|
Example 5.
Lastly, we have the standard academic problem [6] as follows:
which has approximated zero of multiplicity four. The results were obtained on initial guess and shown in Table 5.
Table 5.
Numerical results of function .
Table 5.
Numerical results of function .
| Schemes | |||||
|---|---|---|---|---|---|
4. Concluding Remarks
In this paper, we sorted out the two main issues (that related to multiple roots and the calculation of the derivative at each step) of the well-known King’s family of fourth order. In simple words, we suggested a new family of King’s method that has the key features of optimal order of convergence for multiple roots and being free from derivatives, unlike the classical King’s method. In addition, we established a main theorem that confirmed the theoretical fourth-order convergence. Each member of our scheme satisfied the famous Kung–Traub conjecture that deals with the optimality of iterative methods (without memory). In accordance with the obtained computational consequences, we deduced that our method performed far better than the latest iterative methods of the same generation. The computational Table 1, Table 2, Table 3, Table 4 and Table 5 also confirmed and supported this conclusion.
Author Contributions
R.B., S.B. and E.M.: conceptualization; methodology; validation; writing—original draft preparation; writing—review and editing. M.A.A.: review and editing. All authors read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This research was partially supported by the project PGC2018-095896-B-C22 of the Spanish Ministry of Economy and Competitiveness.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Azarmanesh, M.; Dejam, M.; Azizian, P.; Yesiloz, G.; Mohamad, A.A.; Sanati-Nezhad, A. Passive microinjection within high-throughput microfluidics for controlled actuation of droplets and cells. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Dejam, M. Advective-diffusive-reactive solute transport due to non-Newtonian fluid flows in a fracture surrounded by a tight porous medium. Int. J. Heat Mass Transf. 2019, 128, 1307–1321. [Google Scholar] [CrossRef]
- Nikpoor, M.H.; Dejam, M.; Chen, Z.; Clarke, M. Chemical-Gravity-Thermal Diffusion Equilibrium in Two-Phase Non-isothermal Petroleum Reservoirs. Energy Fuel 2016, 30, 2021–2034. [Google Scholar] [CrossRef]
- Traub, J.F. Iterative Methods for the Solution of Equations; Prentice- Hall Series in Automatic Computation: Englewood Cliffs, NJ, USA, 1964. [Google Scholar]
- Ortega, J.M.; Rheinboldt, W.C. Iterative Solution of Nonlinear Equations in Several Variables; Academic Press: New-York, NY, USA, 1970. [Google Scholar]
- Behl, R.; Bhalla, S.; Magreñán, Á.A.; Moysi, A. An Optimal Derivative Free Family of Chebyshev–Halley’s Method for Multiple Zeros. Mathematics 2021, 9, 546. [Google Scholar] [CrossRef]
- Ostrowski, A.M. Solutions of Equations and System of Equations; Academic Press: New York, NY, USA, 1964. [Google Scholar]
- Petković, M.S.; Neta, B.; Petković, L.D.; Dzunić, J. Multipoint Methods for Solving Nonlinear Equations; Academic Press: New York, NY, USA, 2012. [Google Scholar]
- Li, S.; Liao, X.; Cheng, L. A new fourth-order iterative method for finding multiple roots of nonlinear equations. Appl. Math. Comput. 2009, 215, 1288–1292. [Google Scholar]
- Sharma, J.R.; Sharma, R. Modified Jarratt method for computing multiple roots. Appl. Math. Comput. 2010, 217, 878–881. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, X.; Song, Y. Constructing higher-order methods for obtaining the multiple roots of nonlinear equations. J. Comput. Appl. Math. 2011, 235, 4199–4206. [Google Scholar] [CrossRef]
- Neta, B.; Chun, C.; Scott, M. On the development of iterative methods for multiple roots. Appl. Math. Comput. 2013, 224, 358–361. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.S.; Torregrosa, J.R. On developing fourth-order optimal families of methods for multiple roots and their dynamics. Appl. Math. Comput. 2015, 265, 520–532. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.S.; Torregrosa, J.R.; Kanwar, V. An optimal fourth-order family of methods for multiple roots and its dynamics. Numer. Algorithms 2016, 71, 775–796. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. Constructing a family of optimal eighth-order modified Newton-type multiple-zero finders along with the dynamics behind their purely imaginary extraneous fixed points. J. Comput. Appl. Math. 2018, 333, 131–156. [Google Scholar] [CrossRef]
- Kansal, M.; Behl, R.; Mahnashi, M.A.A.; Mallawi, F. Modified Optimal Class of Newton-Like Fourth-Order Methods for Multiple Roots. Symmetry 2019, 11, 526. [Google Scholar] [CrossRef]
- Hueso, J.L.; Martńez, E.; Teruel, C. Determination of multiple roots of nonlinear equations and applications. Math. Chem. 2015, 53, 880–892. [Google Scholar] [CrossRef]
- Kumar, D.; Sharma, J.R.; Argyros, I.K. Optimal one-point iterative function free from derivatives for multiple roots. Mathematics 2020, 8, 709. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, S.; Jntschi, L. On Derivative Free Multiple-Root Finders with Optimal Fourth Order Convergence. Mathematics 2020, 8, 1091. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, S.; Jntschi, L. On a class of optimal fourth order multiple root solvers without using derivatives. Symmetry 2019, 11, 452. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, D.; Sharma, J.R.; Cesarano, C.; Aggarwal, P.; Chu, Y.M. An optimal fourth order derivative-free Numerical Algorithm for multiple roots. Symmetry 2020, 12, 1038. [Google Scholar] [CrossRef]
- Behl, R.; Salimi, M.; Ferrara, M.; Sharifi, S.; Samaher, K.A. Some real life applications of a newly constructed derivative free iterative scheme. Symmetry 2019, 11, 239. [Google Scholar] [CrossRef]
- Kung, H.T.; Traub, J.F. Optimal order of one-point and multipoint iteration. J. Assoc. Comput. Mach. 1974, 21, 643–651. [Google Scholar] [CrossRef]
- Ahlfors, I.V. Complex Analysis; McGraw-Hill Book, Inc.: New York, NY, USA, 1979. [Google Scholar]
- Bradie, B. A Friendly Introduction to Numerical Analysis; Pearson Education Inc.: New Delhi, India, 2006. [Google Scholar]
- Kansal, M.; Alshomrani, A.; Bhalla, S.; Behl, R.; Salimi, M. One Parameter Optimal Derivative-Free Family to Find the Multiple Roots of Algebraic Nonlinear Equations. Mathematics 2020, 8, 2223. [Google Scholar] [CrossRef]
- Douglas, J.M. Process Dynamics and Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1972; Volume 2. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).