
From an Optimal Point to an Optimal Region: A Novel Methodology for Optimization of Multimodal Constrained Problems and a Novel Constrained Sliding Particle Swarm Optimization Strategy

 ,
,  , ,
, ,  ,
, 
Abstract
:1. Introduction
- A statistical test to evaluate the likelihood confidence regions from constrained meta-heuristic optimization is proposed;
- A novel constraints-based sliding particle swarm optimizer is presented to address multi-local minima problems;
- The proposed methodology is evaluated using several benchmark tests and using the optimization problem of a chemical process as a practical case study.
2. Materials and Methods
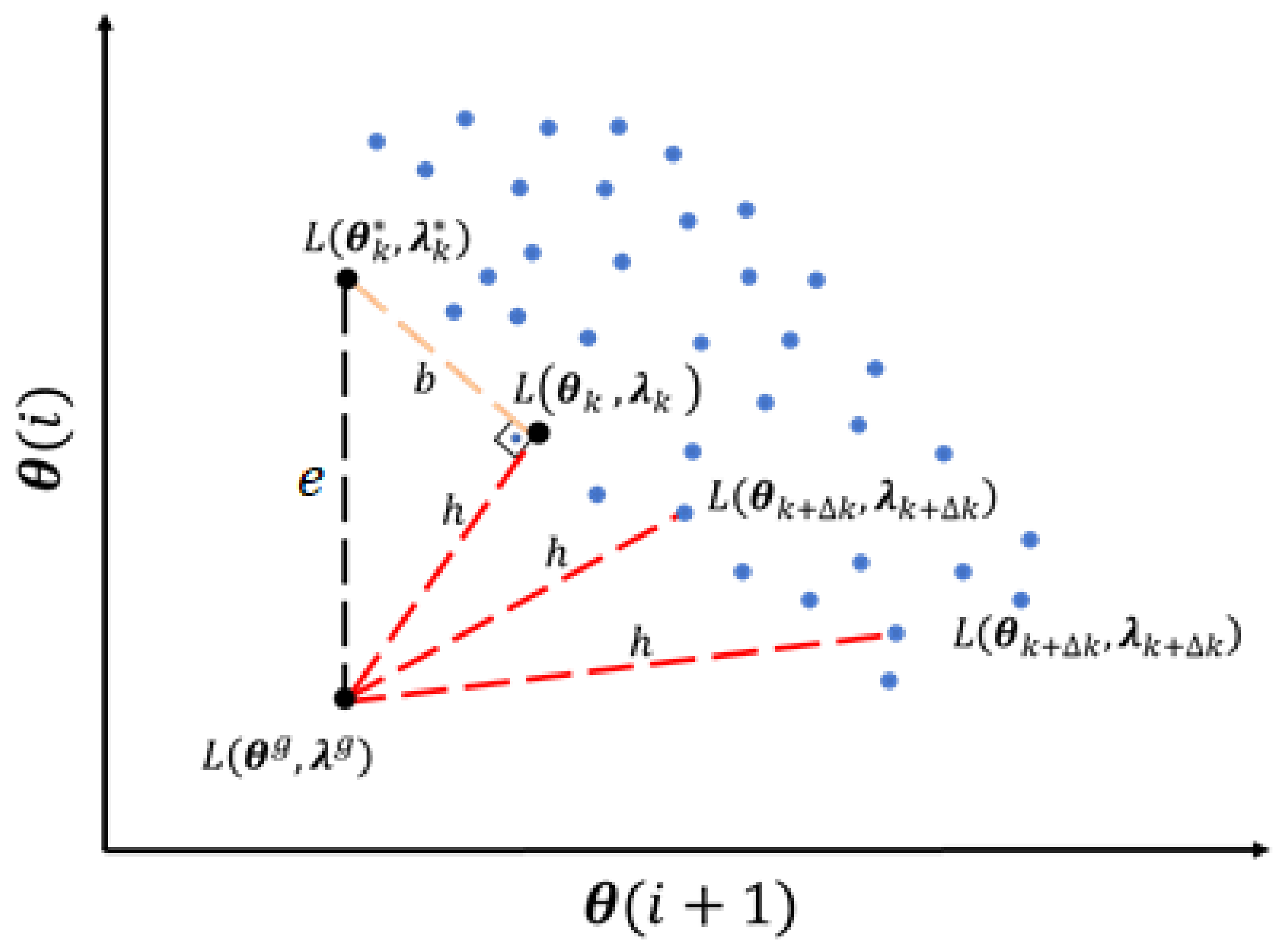
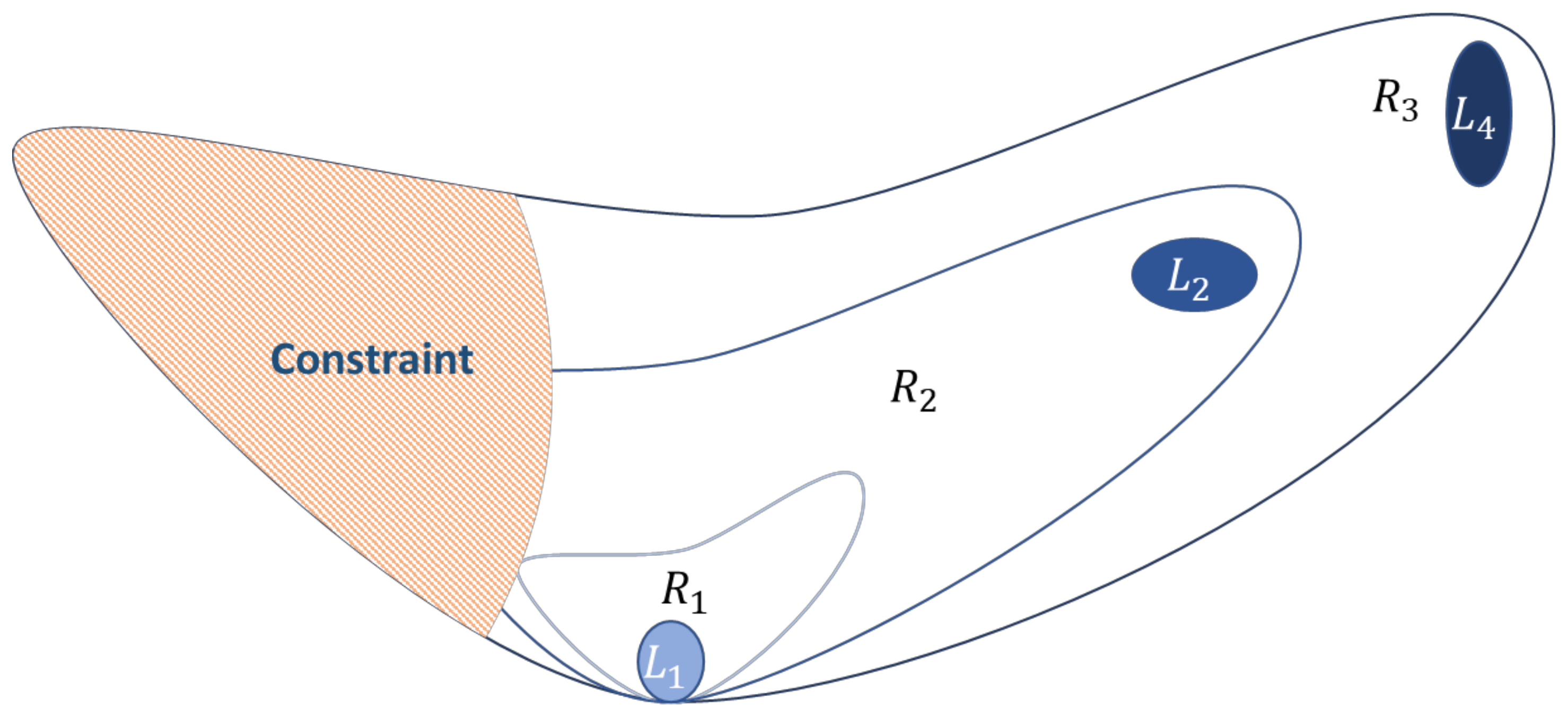
2.1. Likelihood Confidence Region of Constrained Optimization Problems
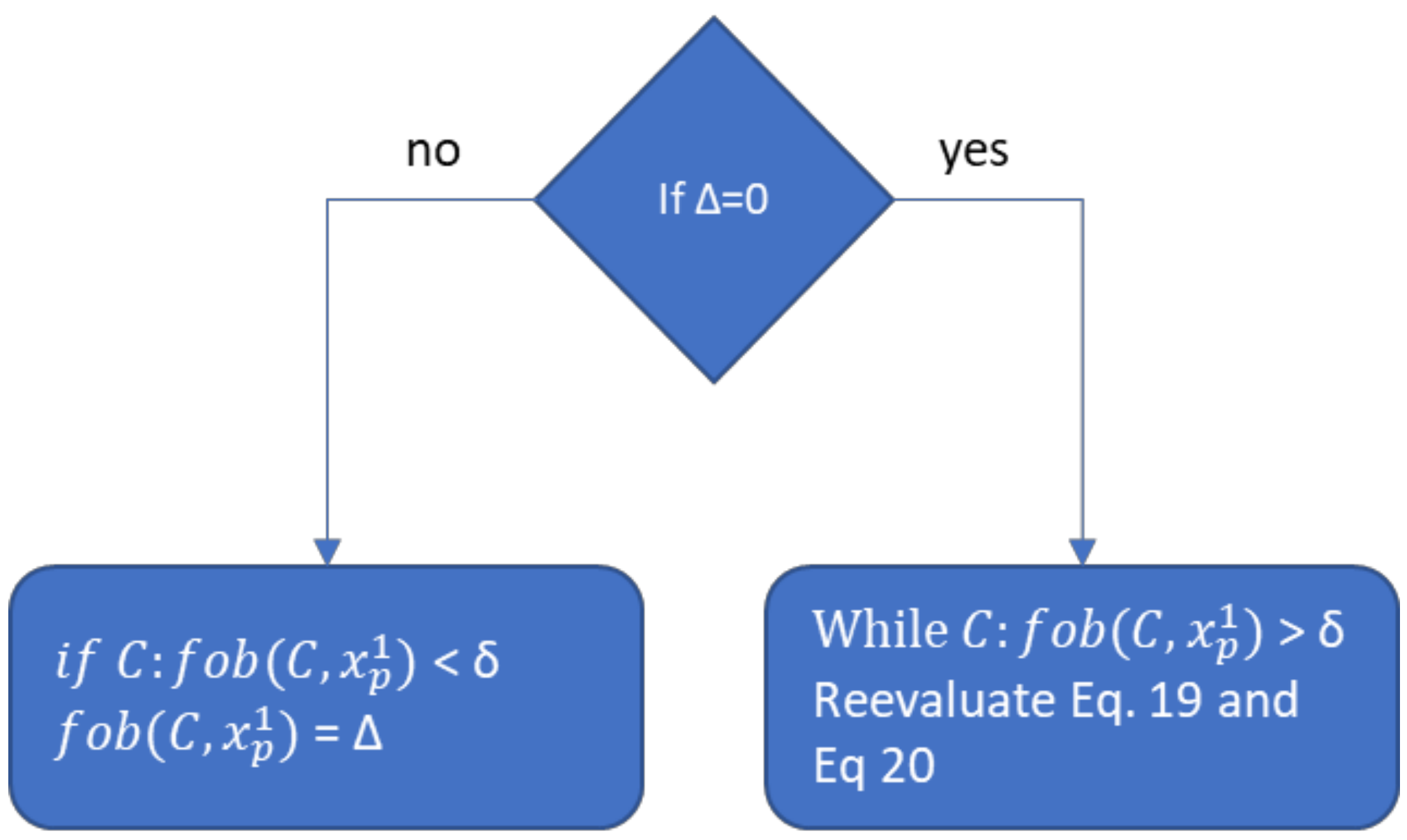
2.2. A Sliding Particle Swarm Optimization for Solving Constrained Optimization Problems
| Algorithm 1. A pseudo-code of the proposed CSPSO |
| Begin Set PSO parameters Acceleration coefficient 1:= Acceleration coefficient 2:= Define the value of the criteria χ for the maximum number of iteration within the same minima of a local minima l = 0 while (termination condition = false, expansion of search domain) to number of iterations to number of particles ) to number of dimensions update particle position and velocity ) to number of dimensions end |
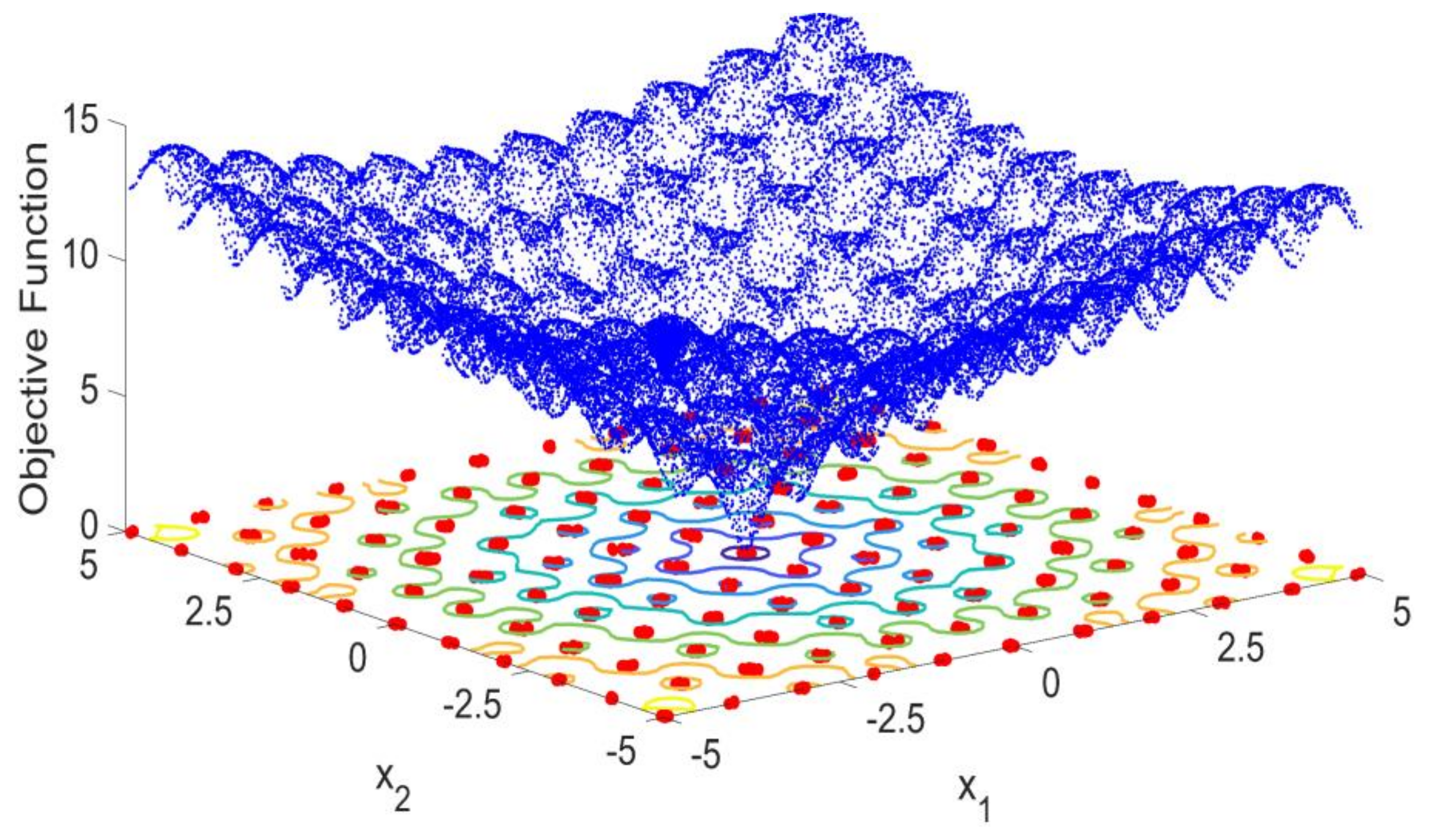
3. Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Park, C. Determination of the joint confidence region of the optimal operating conditions in robust design by the bootstrap technique. Int. J. Prod. Res. 2013, 51, 4695–4703. [Google Scholar] [CrossRef] [Green Version]
- Nogueira, I.B.R.; Martins, M.A.F.; Requião, R.; Oliveira, A.R.; Viena, V.; Koivisto, H.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M. Optimization of a True Moving Bed unit and determination of its feasible operating region using a novel Sliding Particle Swarm Optimization. Comput. Ind. Eng. 2019, 135. [Google Scholar] [CrossRef]
- Schwaab, M.; Biscaia, E.C.; Monteiro, J.L.; Pinto, J.C. Nonlinear parameter estimation through particle swarm optimization. Chem. Eng. Sci. 2008, 63, 1542–1552. [Google Scholar] [CrossRef]
- Benyahia, B.; Latifi, M.A.; Fonteix, C.; Pla, F. Emulsion copolymerization of styrene and butyl acrylate in the presence of a chain transfer agent. Part 2: Parameters estimability and confidence regions. Chem. Eng. Sci. 2013, 90, 110–118. [Google Scholar] [CrossRef] [Green Version]
- Nogueira, I.B.R.; Faria, R.P.V.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M. Chromatographic studies of n-Propyl Propionate, Part II: Synthesis in a fixed bed adsorptive reactor, modelling and uncertainties determination. Comput. Chem. Eng. 2019, 128, 164–173. [Google Scholar] [CrossRef]
- Nogueira, I.B.R.; Faria, R.P.V.; Requião, R.; Koivisto, H.; Martins, M.A.F.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M. Chromatographic studies of n-Propyl Propionate: Adsorption equilibrium, modelling and uncertainties determination. Comput. Chem. Eng. 2018, 119, 371–382. [Google Scholar] [CrossRef]
- Bard, Y. Nonlinear Parameter Estimation; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Al-Dunainawi, Y.; Abbod, M.F.; Jizany, A. A new MIMO ANFIS-PSO based NARMA-L2 controller for nonlinear dynamic systems. Eng. Appl. Artif. Intell. 2017, 62, 265–275. [Google Scholar] [CrossRef] [Green Version]
- Nery, G.A.; Martins, M.A.F.; Kalid, R. A PSO-based optimal tuning strategy for constrained multivariable predictive controllers with model uncertainty. ISA Trans. 2014, 53, 560–567. [Google Scholar] [CrossRef]
- Soufi, Y.; Bechouat, M.; Kahla, S. Fuzzy-PSO controller design for maximum power point tracking in photovoltaic system. Int. J. Hydrogen Energy 2017, 42, 8680–8688. [Google Scholar] [CrossRef]
- Jiang, Y.; Hu, T.; Huang, C.; Wu, X. An improved particle swarm optimization algorithm. Appl. Math. Comput. 2007, 193, 231–239. [Google Scholar] [CrossRef]
- Parsopoulos, K.E.; Vrahatis, M.N. Particle swarm optimization method in multiobjective problems. In Proceedings of the 2002 ACM symposium on Applied computing, Spain, Madrid, 11–14 March 2002; pp. 603–607. [Google Scholar]
- Nogueira, I.B.R.; Martins, M.A.F.; Regufe, M.J.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M. Big Data-Based Optimization of a Pressure Swing Adsorption Unit for Syngas Purification: On Mapping Uncertainties from a Metaheuristic Technique. Ind. Eng. Chem. Res. 2020. [Google Scholar] [CrossRef]
- Ratnaweera, A.; Halgamuge, S.K.; Watson, H.C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients. IEEE Trans. Evol. Comput. 2004, 8, 240–255. [Google Scholar] [CrossRef]
- Engelbrecht, A. Particle swarm optimization: Velocity initialization. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012; pp. 10–15. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Liu, J. Multi-leader PSO (MLPSO): A new PSO variant for solving global optimization problems. Appl. Soft Comput. J. 2017, 61, 256–263. [Google Scholar] [CrossRef]
- Matos, J.; Faria, R.P.V.; Nogueira, I.B.R.; Loureiro, J.M.; Ribeiro, A.M. Optimization strategies for chiral separation by true moving bed chromatography using Particles Swarm Optimization (PSO) and new Parallel PSO variant. Comput. Chem. Eng. 2019, 123, 344–356. [Google Scholar] [CrossRef]
- Kachitvichyanukul, V. Comparison of Three Evolutionary Algorithms: GA, PSO, and DE. Ind. Eng. Manag. Syst. 2012, 11, 215–223. [Google Scholar] [CrossRef] [Green Version]
- Hassan, R.; Cohanim, B.; Weck, O. de A comparison of particle swarm optimization and the genetic algorithm. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005; pp. 1–13. [Google Scholar] [CrossRef]
- Duan, Y.; Harley, R.G.; Habetler, T.G. Comparison of Particle Swarm Optimization and Genetic Algorithm in the design of permanent magnet motors. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 822–825. [Google Scholar]
- Panda, S.; Padhy, N.P. Comparison of particle swarm optimization and genetic algorithm for FACTS-based controller design. Appl. Soft Comput. J. 2008, 8, 1418–1427. [Google Scholar] [CrossRef]
- Minceva, M.; Rodrigues, A.E. Simulated moving-bed reactor: Reactive-separation regions. AIChE J. 2005, 51, 2737–2751. [Google Scholar] [CrossRef]
- Gonçalves, J.C.; Rodrigues, A.E. Simulated moving bed reactor for p-xylene production: Dual-bed column. Chem. Eng. Process. Process. Intensif. 2016, 104, 75–83. [Google Scholar] [CrossRef]
- Pereira, C.S.M.; Gomes, P.S.; Gandi, G.K.; Silva, V.M.T.M.; Rodrigues, A.E. Multifunctional Reactor for the Synthesis of Dimethylacetal. Ind. Eng. Chem. Res. 2008, 47, 3515–3524. [Google Scholar] [CrossRef]
- Pereira, C.S.M.; Rodrigues, A.E. Process intensification: New technologies (SMBR and PermSMBR) for the synthesis of acetals. Catal. Today 2013, 218–219, 148–152. [Google Scholar] [CrossRef]
- Constantino, D.S.M.; Pereira, C.S.M.; Faria, R.P.V.; Ferreira, A.F.P.; Loureiro, J.M.; Rodrigues, A.E. Synthesis of butyl acrylate in a fixed-bed adsorptive reactor over Amberlyst 15. AIChE J. 2015, 61, 1263–1274. [Google Scholar] [CrossRef]
- Nogueira, I.B.R.; Viena, V.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M. Dynamics of a True Moving Bed Reactor: Synthesis of n-Propyl Propionate and an alternative optimization method. Chem. Eng. Process. Process. Intensif. 2020, 148, 107821. [Google Scholar] [CrossRef]
- Nogueira, I.B.R. Optimization and Control of TMB, SMB and SMBR Units; University of Porto: Porto, Portugal, 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh number Number of particles for each mesh Number of iterations for each mesh Number of parameters Confidence level | 20 100 100 2 0.5 2.5 2.5 0.5 0.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rebello, C.M.; Martins, M.A.F.; Loureiro, J.M.; Rodrigues, A.E.; Ribeiro, A.M.; Nogueira, I.B.R. From an Optimal Point to an Optimal Region: A Novel Methodology for Optimization of Multimodal Constrained Problems and a Novel Constrained Sliding Particle Swarm Optimization Strategy. Mathematics 2021, 9, 1808. https://doi.org/10.3390/math9151808
Rebello CM, Martins MAF, Loureiro JM, Rodrigues AE, Ribeiro AM, Nogueira IBR. From an Optimal Point to an Optimal Region: A Novel Methodology for Optimization of Multimodal Constrained Problems and a Novel Constrained Sliding Particle Swarm Optimization Strategy. Mathematics. 2021; 9(15):1808. https://doi.org/10.3390/math9151808
Chicago/Turabian StyleRebello, Carine M., Márcio A. F. Martins, José M. Loureiro, Alírio E. Rodrigues, Ana M. Ribeiro, and Idelfonso B. R. Nogueira. 2021. "From an Optimal Point to an Optimal Region: A Novel Methodology for Optimization of Multimodal Constrained Problems and a Novel Constrained Sliding Particle Swarm Optimization Strategy" Mathematics 9, no. 15: 1808. https://doi.org/10.3390/math9151808
APA StyleRebello, C. M., Martins, M. A. F., Loureiro, J. M., Rodrigues, A. E., Ribeiro, A. M., & Nogueira, I. B. R. (2021). From an Optimal Point to an Optimal Region: A Novel Methodology for Optimization of Multimodal Constrained Problems and a Novel Constrained Sliding Particle Swarm Optimization Strategy. Mathematics, 9(15), 1808. https://doi.org/10.3390/math9151808