
Control Techniques for a Class of Fractional Order Systems

Abstract
:1. Introduction
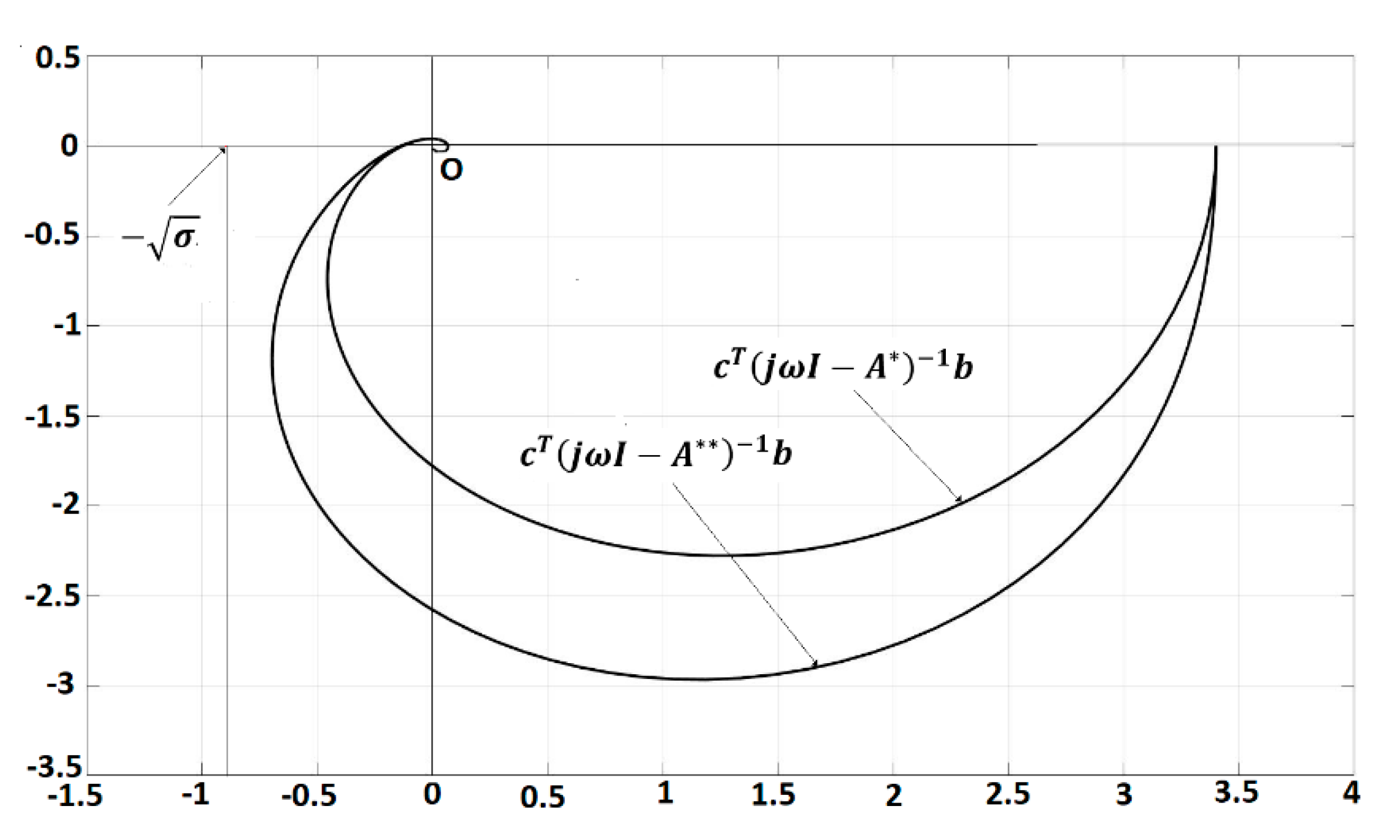
- Frequency criterion for linear FOS is proposed. Lyapunov techniques and the methods that derive from Yakubovici-Kalman-Popov Lemma [40] are used and the criteria that ensure asymptotic stability of the closed loop system are inferred. The criterion is extended to linear FOS with nonlinear components.
- Frequency criterion for time delay FOS is proposed using an approximate model based on Grunwald-Letnikov formula. The result is extended to the systems with nonlinear components.
- Stability criterion is proposed for systems composed of fractional order subsystems.
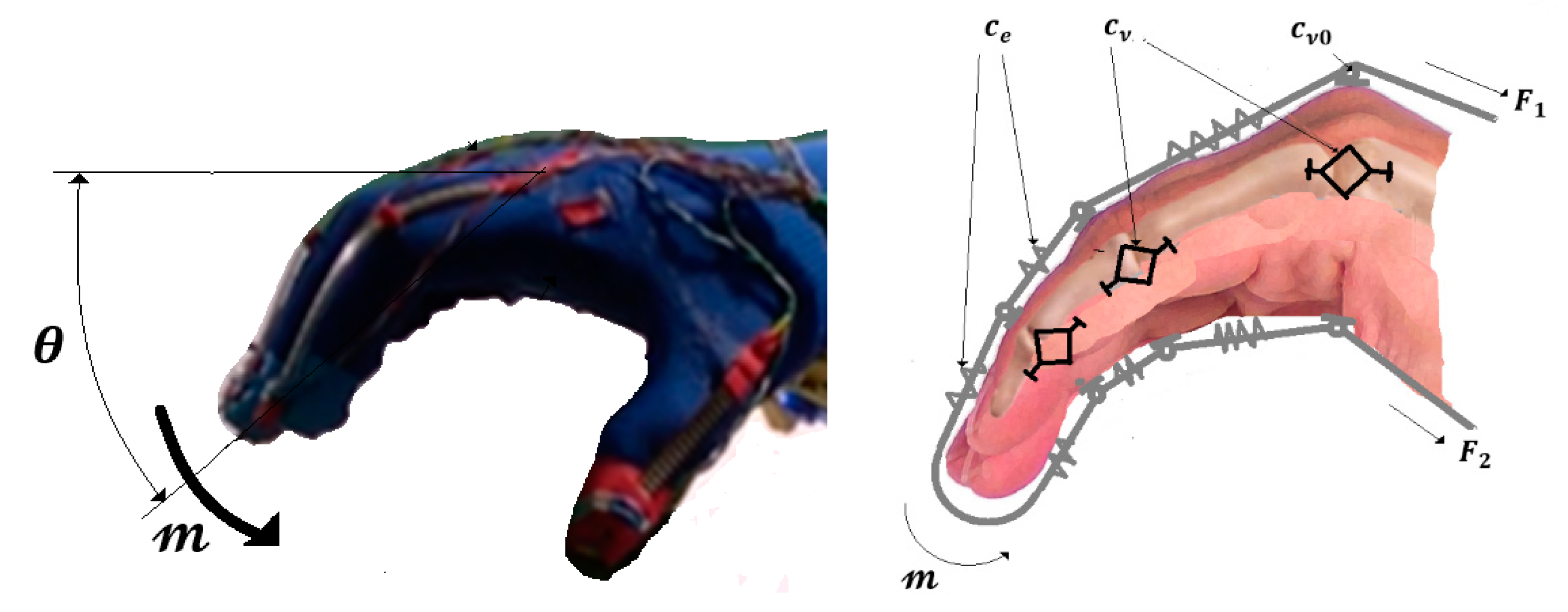
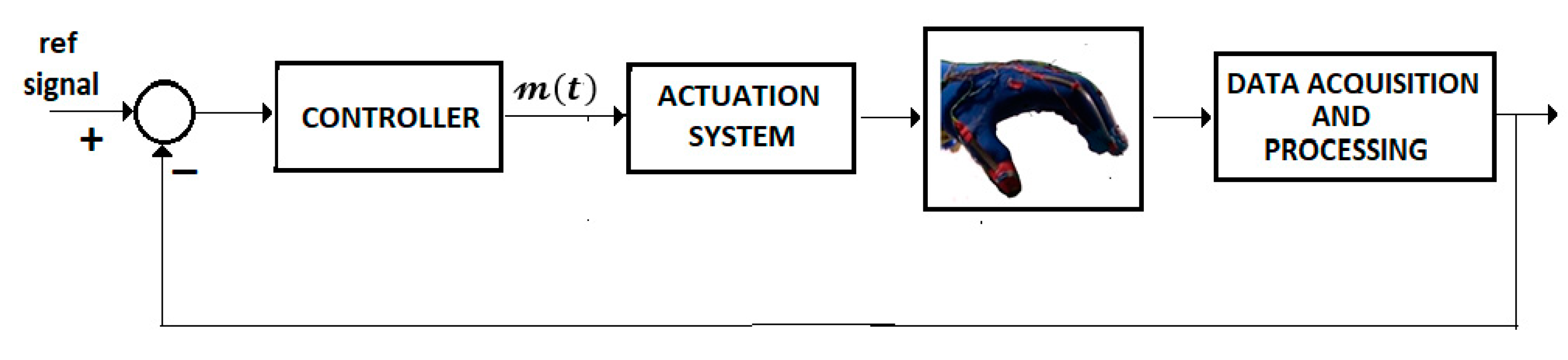
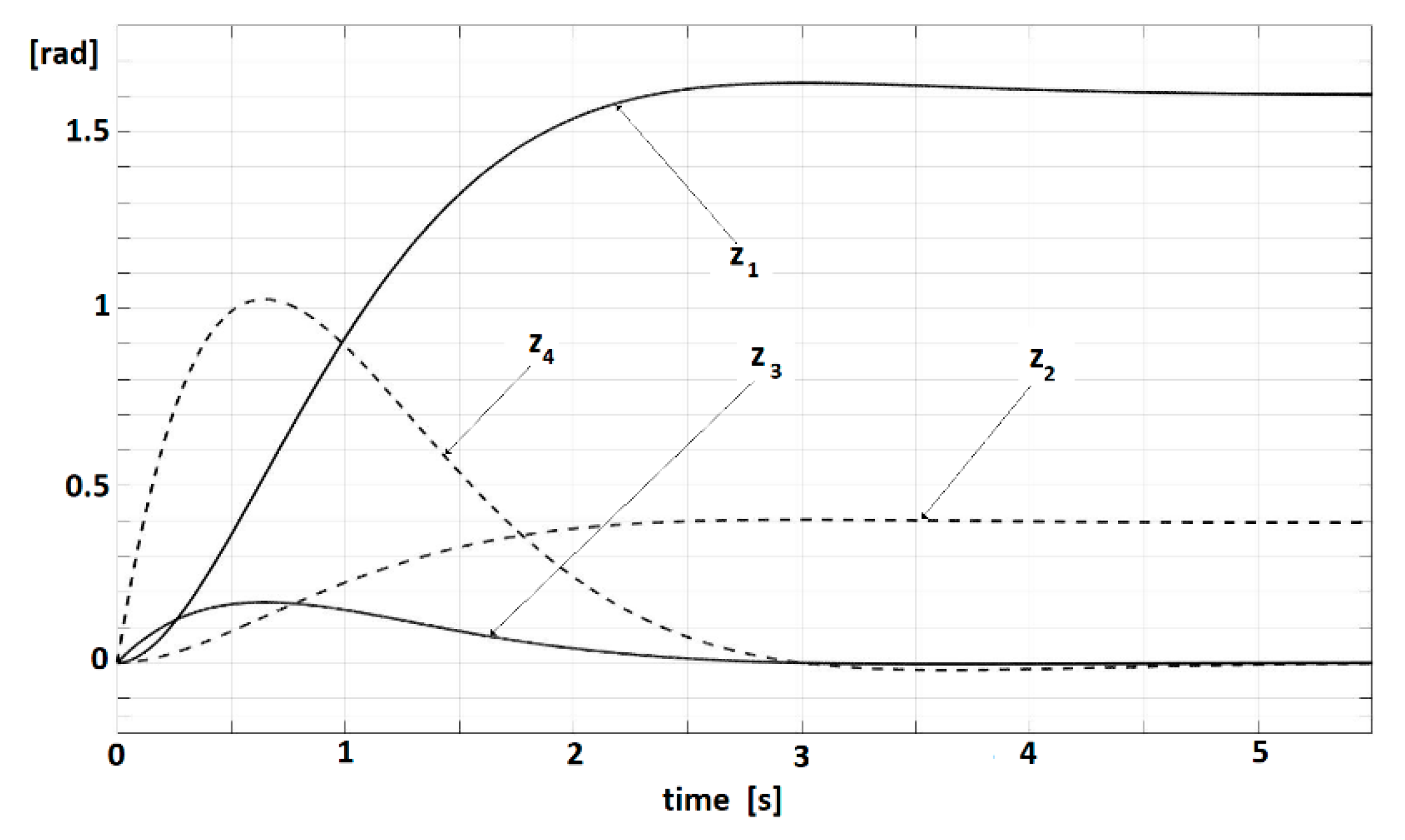
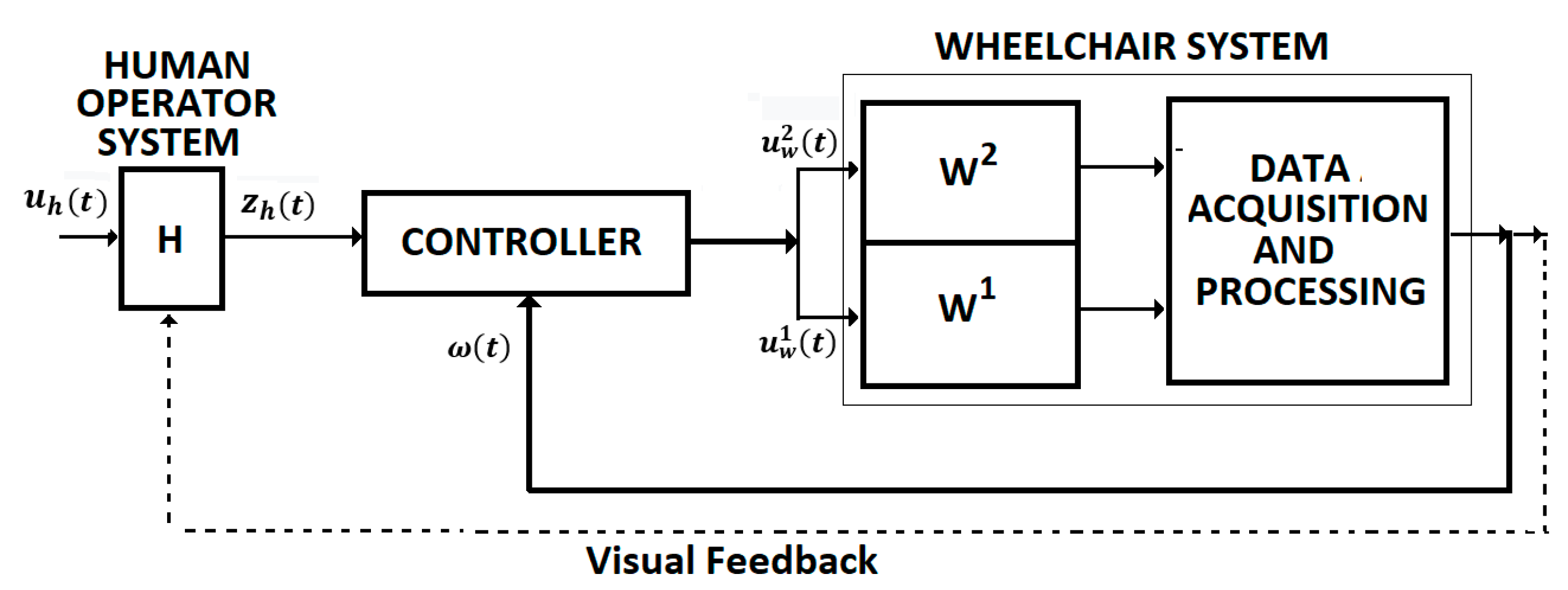
- The proposed methods have been implemented on two major applications: Soft Exoskeleton Glove Control that is studied as a nonlinear FOS model with time delay and Disabled Man-Wheelchair system that is studied as a fractional-order multi- system.
2. Control Techniques
2.1. Mathematical Preliminaries
2.2. Control Algorithms
2.2.1. Fractional Order Linear Systems (FOLS)
2.2.2. Fractional Order Linear Systems with Nonlinear Components
2.2.3. Time Delay Fractional Order Linear Systems (TDFOLS)
2.2.4. Systems Composed of Linear Fractional Order Subsystems
2.2.5. Control Systems-Conclusions
3. Results
3.1. Soft Exoskeleton Glove Control
3.1.1. Case 1-FOLS Model
3.1.2. Case 2-TDFOLS Model
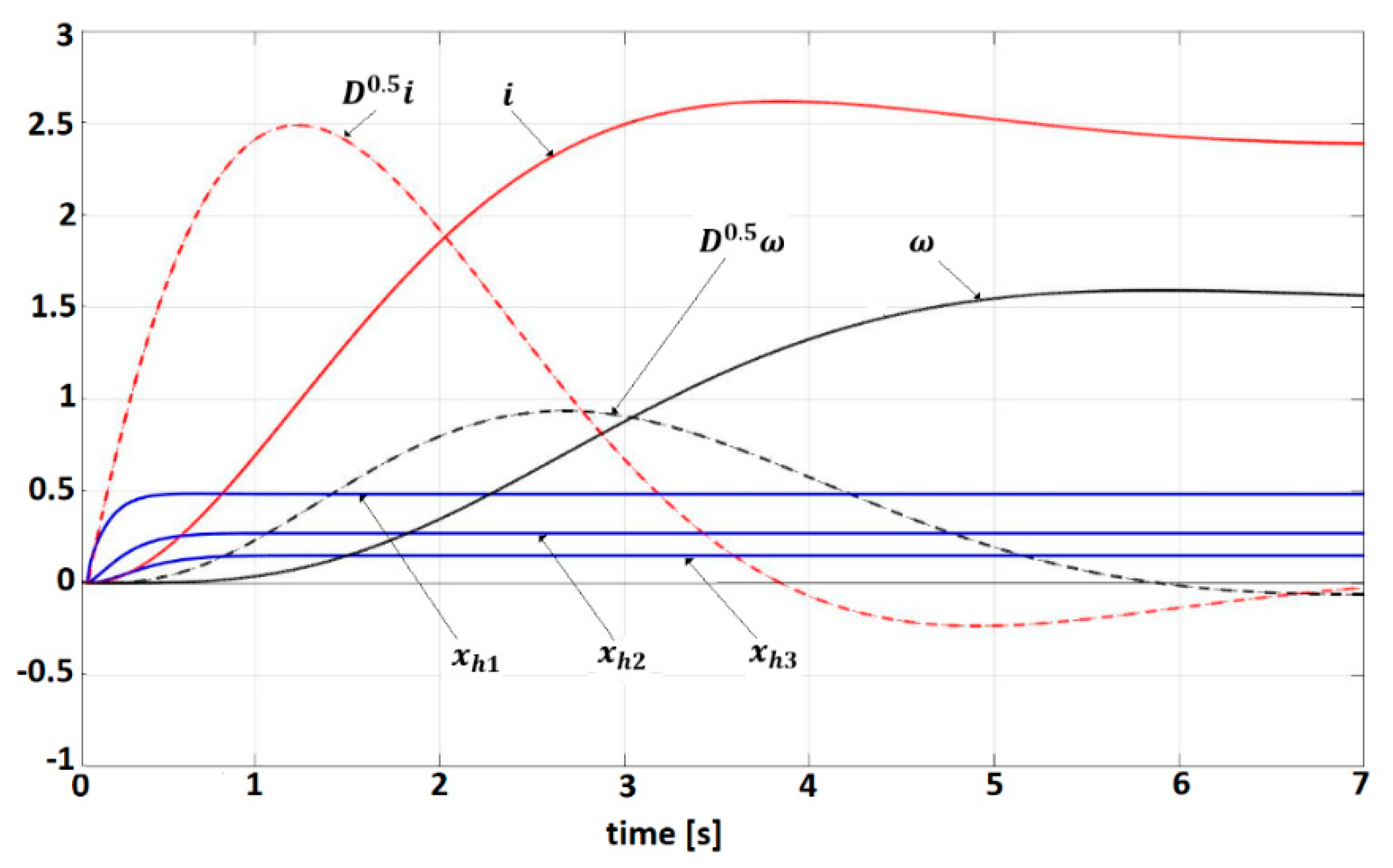
3.2. Disabled Man-Wheelchair System Control
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Disabled Human Parameters
- Human time constants: .
- Human gain .
- The matrix that designates the influence of the whelchair motion on human behavior,
- The interconnection matrix between the human system and wheelchair system,
- The matrix of human control components in the global control law,
Appendix A.2. Wheelchair System Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| J | Drive System Inertia | 0.270 kg.m2 |
| Ra | Armature resistance | 0.2957 |
| La | Armature inductance | 0.082 mH |
| Viscous friction coefficient | 0.1044 Nm s/rad | |
| ke | Speed constant | 1.685 rad/s/V |
| kt | Torque constant | 1.4882 Nm/A |
| m | Wheelchair mass | 98 kg |
References
- Azar, A.T.; Radwan, A.G.; Vaidyanathan, S. (Eds.) Fractional Order Systems: Optimization, Control, Circuit Realization and Applications; Elsevier Inc.: London, UK, 2018; ISBN 978-0-12-816152-4. [Google Scholar]
- Makhlouf, A.B. (Ed.) Fractional-Order Systems: Control Theory and Applications, Special Issue, Mathematical Problems in Engineering; Hindawi XML Corpus: London, UK, 2021. [Google Scholar]
- Monje, C.; Chen, Y.Q.; Vinagre, D.; Hue, V.; Feliu, V. Fractional-Order Systems and Controls; Springer: London, UK, 2010. [Google Scholar]
- Petras, I. Fractional-Order Nonlinear Systems, Modeling, Analysis and Simulation; Higher Education Press: Beijing, China; Springer: Berlin, Germany, 2011. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.; Callegos, J. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Argarwal, R.; Hristova, S.; O’Regan, D. Lyapunov functions and strict stability of Caputo fractional differential equations. Adv. Differ. Equ. 2015, 2015, 346. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, R.; Hristova, S.; O’Reagan, D. Remarks on Lyapunov functions to Caputo fractional neural networks. Ann. Acad. Rom. Sci. 2018, 10, 169–176. [Google Scholar]
- Al-Saggaf, U.M.; Mehedi, I.M.; Mansouri, R.; Bettayeb, M. Rotary flexible joint control by fractional order controllers. Int. J. Control. Autom. Syst. 2017, 15, 2561–2569. [Google Scholar] [CrossRef]
- Dadras, S.; Malek, H.; Chen, Y. A Note on the Lyapunov Stability of Fractional Order Nonlinear Systems. In Proceedings of the 13th ASME/IEEE International Conference on Mechatronic and Embedded Systems and Applications, Cleveland, OH, USA, 6–9 August 2017; pp. 123–129. [Google Scholar]
- Diethelm, K. The Analysis of Fractional Differential Equations; Springer: London, UK, 2004. [Google Scholar]
- Wang, Z.; Wang, C.; Ding, L.; Wang, Z.; Liang, S. Parameter identification of fractional-order time delay system based on Legendre wavelet. Mech. Syst.Signal Process. 2021, 163, 108141. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Q.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Y.; Liu, Z. Lyapunov Function Method for Linear Fractional Order Systems. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 1457–1461. [Google Scholar]
- Xu, Q.; Zhuang, S.; Xu, X.; Che, C.; Xia, Y. Stabilization of a class of fractional order nonautonomous systems using quadratic Lyapunov functions. Adv. Differ. Equ. 2018, 2018, 14. [Google Scholar] [CrossRef] [Green Version]
- Rivero, M.; Rogosin, S.; Machado, J.T. Stability of Fractional Fractional Order Systems. Math. Probl. Eng. 2013, 2013, 356235. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. LMI stability conditions for fractional order systems. Comput. Math. Appl. 2010, 59, 1594–1609. [Google Scholar] [CrossRef]
- Sene, N. Lyapunov Characterization of the Fractional Nonlinear Systems with Exogenous Input. Fractal Fract. 2018, 2, 17. [Google Scholar] [CrossRef] [Green Version]
- Tuan, H.T.; Trinh, H. Stability of fractional-order nonlinear systems by Lyapunov direct method. IET Control. Theory Appl. 2018, 12, 2417–2422. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.F.; Hu, L.G.; Liu, S.; Jiang, W. Stability criterion for a class of nonlinear fractional differential systems. Appl. Math. Lett. 2014, 28, 25–29. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Hussaini, M.Y.; Oates, W. A physical interpretation of fractional viscoelasticity based on the fractal structure of media: Theory and experimental validation. J. Mech. Phys. Solids 2019, 128, 137–150. [Google Scholar] [CrossRef]
- Oates, W.S.; Smith, R.C. Nonlinear Optimal Control Techniques for Vibration Attenuation Using Magnetostrictive Actuators. J. Intell. Mater. Syst. Struct. 2008, 19, 193–209. [Google Scholar] [CrossRef] [Green Version]
- Vadivoo, B.; Raja, R.; Agarwal, R.; Rajchakit, G. A novel controllability analysis of impulsive fractional linear time invariant systems with state delay and distributed delays in control. Interdiscip. J. Discontinuity Nonlinearity Complex. 2018, 7, 275–290. [Google Scholar] [CrossRef]
- Khimani, D.; Patil, M. High Performance Super-twisting Control for State Delay Systems. Int. J. Control. Autom. Syst. 2018, 16, 2063–2073. [Google Scholar] [CrossRef]
- Koo, M.-S.; Choi, H.-L. Fast Regulation Control of a Class of Input-delayed Linear Systems with Pre-feedback. Int. J. Control. Autom. Syst. 2018, 16, 141–149. [Google Scholar] [CrossRef]
- Lazarević, M.P.; Spasić, A.M. Finite-time stability analysis of fractional order time-delay systems: Gronwall’s approach. Math. Comput. Model. 2009, 49, 475–481. [Google Scholar] [CrossRef]
- Wu, B.; Wang, C.-L.; Hu, Y.-J.; Ma, X.-L. Stability Analysis for Time-delay Systems with Nonlinear Disturbances via New Generalized Integral Inequalities. Int. J. Control. Autom. Syst. 2018, 16, 2772–2780. [Google Scholar] [CrossRef]
- Xiao, S.; Xu, L.; Zeng, H.-B.; Teo, K.L. Improved Stability Criteria for Discrete-time Delay Systems via Novel Summation Inequalities. Int. J. Control. Autom. Syst. 2018, 16, 1592–1602. [Google Scholar] [CrossRef]
- Zhang, X. Some results of linear fractional order time-delay system. Appl. Math. Comput. 2008, 197, 407–411. [Google Scholar] [CrossRef]
- Ulukök, Z.; Türkmen, R. Some Upper Matrix Bounds for the Solution of the Continuous Algebraic Riccati Matrix Equation. J. Appl. Math. 2013, 2013, 792782. [Google Scholar] [CrossRef]
- Zhe, Z.; Ushio, T.; Ai, Z.; Jing, Z. Novel stability condition for delayed fractional-order composite systems based on vector Lyapunov function. Nonlinear Dyn. 2019, 99, 1253–1267. [Google Scholar] [CrossRef]
- Fukuda, K.; Ushio, T. Decentralized Event-Triggered Control of Composite Systems Using M-Matrices. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2018, E101-A, 1156–1161. [Google Scholar]
- Mousavi, S.S.; Tavazoei, M.S. Stability Analysis of Fractional Order Systems Described in the Lur’e Structure. arXiv 2015, arXiv:1512.02432v1. [Google Scholar]
- Lozynskyy, O.Y.; Kalenyuk, P.I.; Lozynskyy, A.O.; Kasha, L.V. A Frequency criterion for analysis of stability of systems with fractional-order derivatives. Math. Modeling Comput. 2020, 7, 389–399. [Google Scholar] [CrossRef]
- Zhou, J. Nyquist-Like Stability Criteria for Fractional-Order Linear Dynamical Systems. Control Theory Eng. 2019, 245–258. [Google Scholar] [CrossRef] [Green Version]
- Tepliakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzales, E.; Hosseinia, H.; Petlemkov, E.; Ate, A.; Cechs, M. Towards Industrialization of FOPID Controllers: A Survey on Milestones of FractionalOrder Control and Pathways for Future Developments. IEEE Access 2021, 9, 21016–21042. [Google Scholar] [CrossRef]
- Mohamed, S.M.; Sayed, W.S.; Said, L.A.; Radwan, A.G. Reconfigurable FPGA Realization of Fractional-Order Chaotic Systems. IEEE Access 2021, 9, 89376–89389. [Google Scholar] [CrossRef]
- Pappas, G.; Alimisis, V.; Dimas, C.; Sotiriadis, P. Analogue Realization of a Fully Tunable Fractional-Order PID Controller for a DC Motor. In Proceedings of the 2020 32nd International Conference on Microelectronics (ICM), Aqaba, Jordan, 14–17 December 2020; pp. 486–495. [Google Scholar] [CrossRef]
- Volos, C.; Pham, V.-T. Advances in nonlinear dynamics and chaos, Chapter 11—design guidelines for physical implementation of fractional-order integrators and its application in memristive systems. In Mem-Elements for Neuromorphic Circuits with Artificial Intelligence Applications; Academic Press: London, UK, 2021; pp. 225–248. [Google Scholar]
- Li, Z.; Ding, J.; Wu, M.; Lin, J. Discrete fractional order PID controller design for nonlinear systems. Int. J. Syst. Sci. 2021, 367–378. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Ivanescu, M.; Popescu, N.; Popescu, D.; Channa, A.; Poboroniuc, M. Exoskeleton Hand Control by Fractional Order Models. Sensors 2019, 19, 4608. [Google Scholar] [CrossRef] [Green Version]
- PCCA 150/2016 grant of the Executive Agency for Higher Education, Research Development and Innovation Funding (UEFISCDI)-Sci. Report.
- Huang, J.; Chen, Y.; Li, H.; Shi, X. Fractional Order Modeling of Human Operator Behavior with Second Order Controlled Plant and Experiment Research. IEEE/CAA J. Autom. Sin. 2016, 3, 271–280. [Google Scholar]
- Aydin, Y.; Tokatli, O.; Patoglu, V.; Basdogan, C. Stable Physical Human-Robot Interaction Using Fractional Order Admittance Control. IEEE Trans. Haptics 2017, 11, 464–475. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.G.; Seong, P.H. Information theoretic to man-machine interface complexity evaluation. IEEE Trams. Sys. Man Cyber. 2001, 321, 163–171. [Google Scholar] [CrossRef]
- Wolm, P. Dynamic Stability Control of Front Wheel Drive Wheelchair Using Solid State Accelerometer and Gyroscope. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, 2009. [Google Scholar]


| Papers | Systems | Control Techniques |
|---|---|---|
| 1, 2, 4, 8, 13, 20, 21 | Linear FOS | Algebraic criteria |
| 3, 5, 6, 9, 12, 16, 17, 18, 19, 21 | Nonlinear FOS | Algebraic criteria Matrix Inequalities |
| 32, 33, 34 | Linear FOS | Frequency criteria |
| 11, 22, 24, 25, 26, 27, 28, 30 | Delay FOS | Algebraic criteria |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanescu, M.; Dumitrache, I.; Popescu, N.; Popescu, D. Control Techniques for a Class of Fractional Order Systems. Mathematics 2021, 9, 2357. https://doi.org/10.3390/math9192357
Ivanescu M, Dumitrache I, Popescu N, Popescu D. Control Techniques for a Class of Fractional Order Systems. Mathematics. 2021; 9(19):2357. https://doi.org/10.3390/math9192357
Chicago/Turabian StyleIvanescu, Mircea, Ioan Dumitrache, Nirvana Popescu, and Decebal Popescu. 2021. "Control Techniques for a Class of Fractional Order Systems" Mathematics 9, no. 19: 2357. https://doi.org/10.3390/math9192357