Abstract
In order to solve the problem of geometric design and architectural design of complex engineering surface, we introduce the parametric and geometric continuity constraints of generalized C-Bézier curves and surfaces with shape parameters. Firstly, based on C-Bézier basis with parameters, we study the constraints of the control points of the curves needed to be satisfied when connecting them. Moreover, we study the continuity conditions between two adjacent C-Bézier surfaces with parameters. By the continuity conditions and different shape parameters, the curve and surface can be changed easily and be more flexible without altering its control points. Therefore, by adjusting the values of shape parameters, the curve and surface still preserve its characteristics and geometrical configuration. Some graphical examples ensure that the proposed method greatly improves the ability to design complex curves and surfaces and easy to implement.
1. Introduction
With the increasingly high requirements for product design, many products have to carry out the corresponding geometric modeling design of curves and surfaces before manufacturing, such as car shell design, aircraft wing design and people wearing shoes, clothes, and so on daily. The study of curve and surface modeling has always been the core content of CAGD research. In practical application, complex curve and surface modeling are often encountered, which is difficult to be represented by a curve or a piece of surface. How to realize the splicing of curves and surfaces, so that they are convenient and flexible to be applied to various curves and surfaces modeling, is the problem we need to solve. Traditional Bézier curves, which is formed by the classical Bernstein basis functions and control points, have many excellent properties like symmetry, terminal properties, partition of unity, non-negativity, linear precision, integral property, convex hull property, etc. We can easily construct any shape by using parametric and geometric continuity constraints of the classical Bézier curve, but its drawback is that we cannot modify and cannot make a small adjustment in the shape of the curves design without changing the control points. To overcome this problem, we study those basis functions that possess shape parameters that help us to make small modifications in the shape of the curves according to the shape parameters. These shape parameters do not affect the physical and geometrical configuration of the curves. In addition, many practical applications, such as the modeling of industrial products, are quite complex and usually cannot be constructed with a single surface [1,2]. Therefore, by connecting multiple surface patches, we can design the complex engineering surfaces.
In [3], Hering defined continuous Bézier and B-spline curves with and and their tangent polygons. He considered dividing the segmented Bézier curves and B-spline curves to express their parameters and geometric continuities. Yan [4] proposed a specific family of Bézier curves with three different shape parameters, also called adjustable Bézier curves. Those curves have the same shape and structure as the traditional quartic Bézier curve. Schneider and Kobbelt [5] described the discrete smoothing of curves and surfaces based on linear curvature distribution. Geometric and parametric continuities with arc length parametrization and smoothness were given in [6]. In [7], Bashir and Abbas used rational quadratic triangular Bézier curves to give the continuity conditions of and and their applications. They also used the rational quadratic triangular Bézier curve to construct a conic section-like circle and ellipse. Qin and Hu gave the parameter continuity and geometric continuity conditions of the GE Bézier curve, and presented the geometric meaning of the shape parameters in [8]. Misro and Ramli [9] presented a new quintic trigonometric Bézier curve with two shape parameters. Shape parameters provide more control on the shape of the curve compared to the ordinary Bézier curve. This technique is one of the crucial parts in constructing curves and surfaces because the presence of shape parameters will allow the curve to be more flexible without changing its control points. The paper also discussed its parameters and curvature continuity.
BiBi and Abbas [10] proposed an important idea to tackle the problem in the construction of some engineering symmetric revolutionary curves and symmetric rotation surfaces by using the generalized hybrid trigonometric Bézier curve. In addition, they described an algorithm for constructing various symmetrical rotation curves in 2D plane and also symmetric rotation surfaces in 3D (space) by using the GHT-Bézier curve involving shape parameter . BiBi and Abbas [11] proposed a new continuous method of the GHT-Bézier curve with many practical applications.
Hu and Bo [12] described the and smooth continuity conditions between two adjacent Q-Bézier curves of degree n and analyzed the influence rules of shape parameters on the shapes of splicing curves, as well as the basic steps of smooth continuity. In [13], Han and Ma proposed a cubic triangular Bézier curve with two different shape parameters and its properties, and discussed continuity constraints through curve modeling. Hu and Wu constructed a SG-Bézier curve with multiple shape parameters, and discussed the modeling of various engineering surfaces based on SG-Bézier such as oscillating surface, swept surface, and rotating surface in [14]. In [15], Reenu Sharma constructed the quartic trigonometric Bézier (QTB) curve with two different shape parameters and discussed the properties of the QTB curve with shape modeling and the shape control of the curves.
Hu and Cao [16] constructed a kind of generalized Bézier-like surfaces associated with multiple shape parameters. The continuity conditions for the generalized Bézier-like surfaces of degree are derived, and the influence rules of the shape parameters on splicing surfaces are analyzed.
The following chapters of this paper are arranged as follows: In Section 2, it mainly introduces some theoretical knowledge about C-Bézier basis functions with n shape parameters and C-Bézier curves. The parametric and geometric continuity of C-Bézier curves with their mathematical and graphical results are given in Section 3. All figures in this paper are realized by software Matlab 2015a. In Section 4, some concrete examples are given to verify the effectiveness of curve connection. Then, Section 5 describes the geometric continuity (), of C-Bézier surfaces in various directions with its graphical and mathematical representations. An algorithm for the construction of C-Bézier surfaces by continuity conditions is presented in Section 6. Finally, this paper summarizes the research content of this paper.
2. Basic Knowledge of C-Bézier Basis with Parameters
Zhang [17,18] constructed cubic C-curves and C-surfaces with one parameter in the space span t, . Chen and Wang [19] investigated a new C-Bézier basis with degree n through the space span When the parameter , these bases have the same properties as Bernstein bases. Li and Zhu [20] constructed a new C-Bézier basis function with n parameters. First, the original functions are given as:
where Then, we can get
Definition 1
([20]). C-Bézier basis functions with n parameters are
where , . If n = 2, , if .
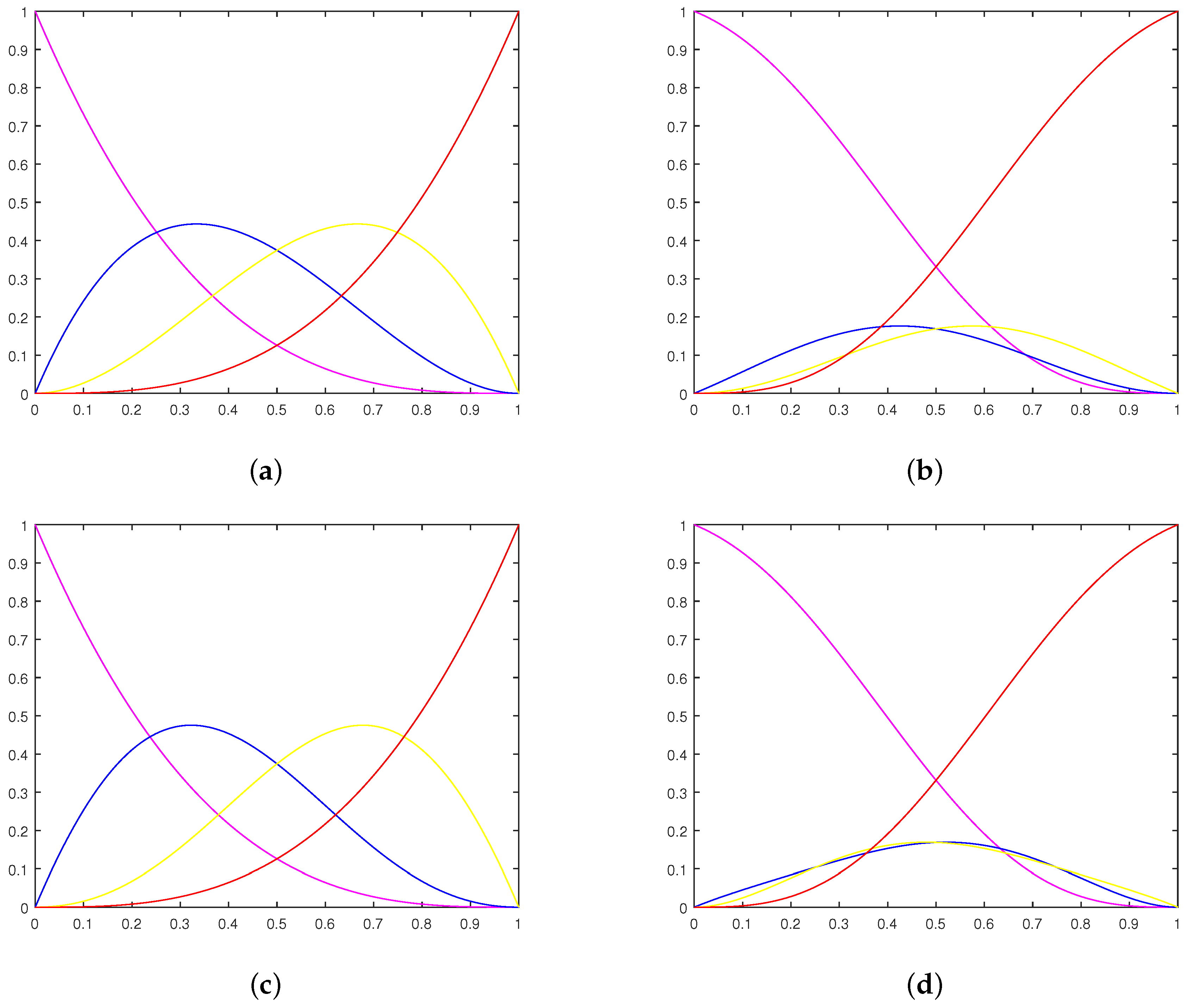
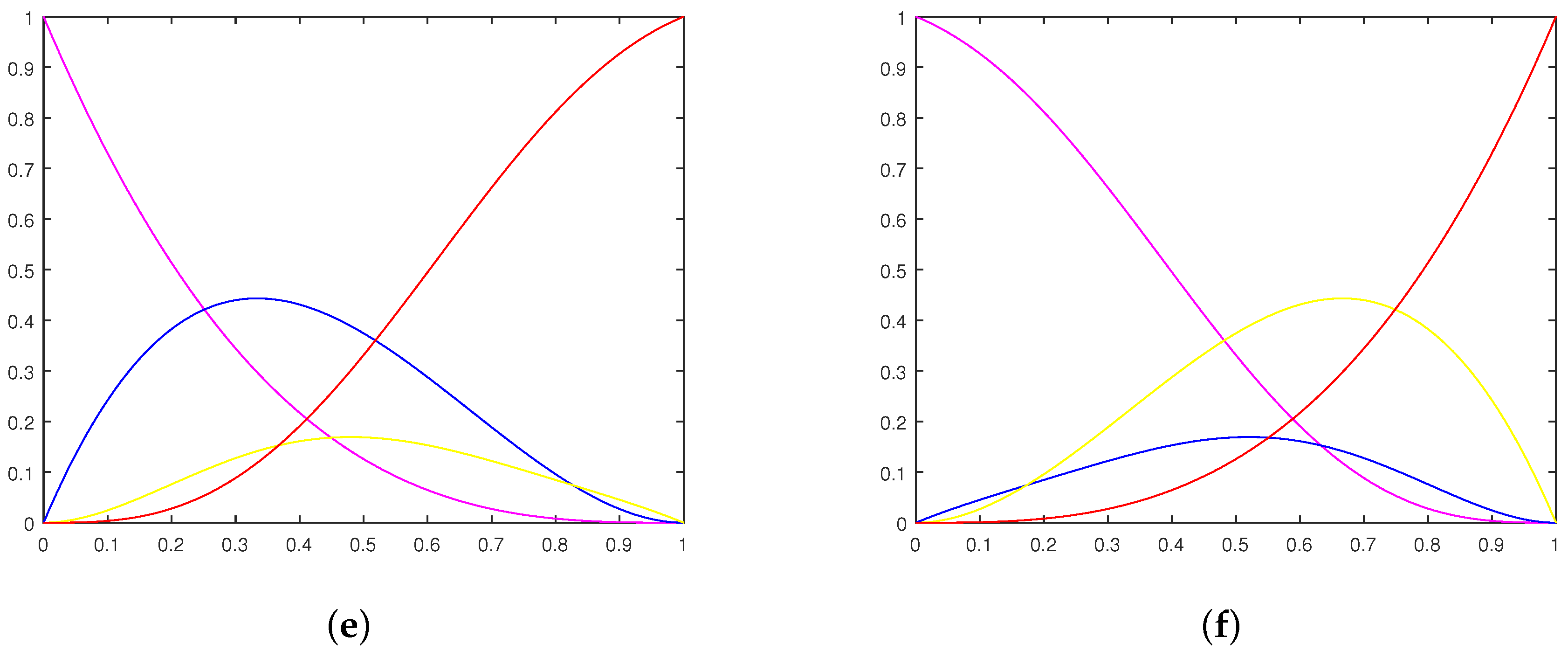
Figure 1 shows the image of the cubic C-Bézier basis functions with different parameter values.
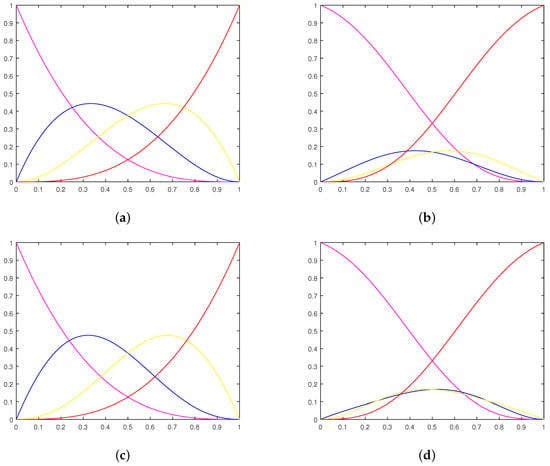
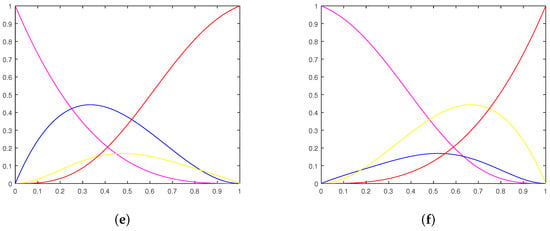
Figure 1.
Cubic basis functions. (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
3. Continuity Constraints of C-Bézier Curves with N Parameters
In the CAD/CAM system, it is a very difficult process to use the continuous conditions of and of the traditional Bézier curves to construct complex curves and figures. While the C-Bézier curve has different shape parameters and great smoothness, it can be easily bent by adjusting the shape parameters according to our choice. It uses parameters and geometric continuity constraints to construct various complex curves, which cannot be executed by classical Bézier curves.
Considering any two adjacent C-Bézier curves, which can be defined as:
where and are the control points of these two adjacent C-Bézier curves, and are C-Bézier basis functions of degree and , respectively, and are the shape parameters of curves.
3.1. Parametric Continuity of C-Bézier Curves with Parameters
Given two C-Bézier curves and of the same degree, the necessary and sufficient conditions for parametric continuity at the joints are given as follows:
1. For continuity:
2. For continuity:
3. For continuity:
Proof.
For the continuity of C-Bézier curves, we keep both the first and second curves equal at the final and initial point of the domain respectively as . We can obtain .
Similarly, for and continuity conditions, we consider the first and second derivative of both curves equal like as in [10] to obtain the control points , given in Equations (5) and (6), respectively. □
3.2. Geometric Continuity of C-Bézier Curves
Like parametric continuity, geometric continuity also helps us to construct different complex figures. It is better than parametric continuity because the scale factor gives us more smoothness.
Given two C-Bézier curves and of the same degree, the necessary and sufficient conditions for geometric continuity of and are given as follows:
1. For continuity:
2. For continuity:
3. For continuity:
where is any positive real number.
Proof.
For the continuity of C-Bézier curves, we keep both the first and second curves equal at the final and initial point of the domain, respectively, as . We can obtain . Similarly, for continuity conditions, we keep both the first and second curves equal at the final and initial point and we also consider the first derivative of both curves involving a scale factor such as
Then, we can get:
Now, for continuity, besides continuity, we need to satisfy the continuity condition that is the curvature of the first curve at the last point and the second curve at the first point should be equal, that is
therefore, the normal vector of and the normal vector of have the same direction. Therefore, these four vectors , , , are in the same plane, so we have :
and we can get ; then, the continuity condition can be described as Equation (9). □
4. Examples
4.1. Algorithm for the Construction of Curves by Parametric Continuity Constraints
In this section, we present an algorithm for constructing complex curves with parametric continuity constraints, we know that smooth curves can be easily obtained by using continuity conditions, and shape parameters can be adjusted to modify the shape of curves according to our needs.
The procedure for the construction of complex figures by parametric continuity between two C-Bézier curve segments is given as follows:
- I.
- For C-Bézier curve of degree n, we consider the first curve with shape parameters like and its control points .
- II.
- For continuity by keeping , we have new point and the remaining control points are left to choice.
- III.
- Similarly, for continuous, the tangent vectors of the first curve at the end point and the second curve are equal, we obtain . Therefore, the new control point of the second curve is obtained, and the remaining control points of the second curve are free to choose.
- IV.
- Finally, for continuity, the continuity condition of the two curves is first guaranteed, and the second derivative of the initial curve and the second curve is also guaranteed to be equal at the end point, that is, ; then, we get the new control point of the second curve, and the remaining control points of the second curve are free to choose.
Hence, by using the above algorithm, figures can be obtained by using continuity conditions. Some of the constructions of C-Bézier curve are given below.
- 1.
- continuity of cubic C-Bézier curves with parameters.Because the cubic C-Bézier curve has three shape parameters, and we can construct various figures by using the continuity of any two curves. Therefore, consider any two cubic C-Bézier curves named and containing shape parameters and , respectively:
Example 1.
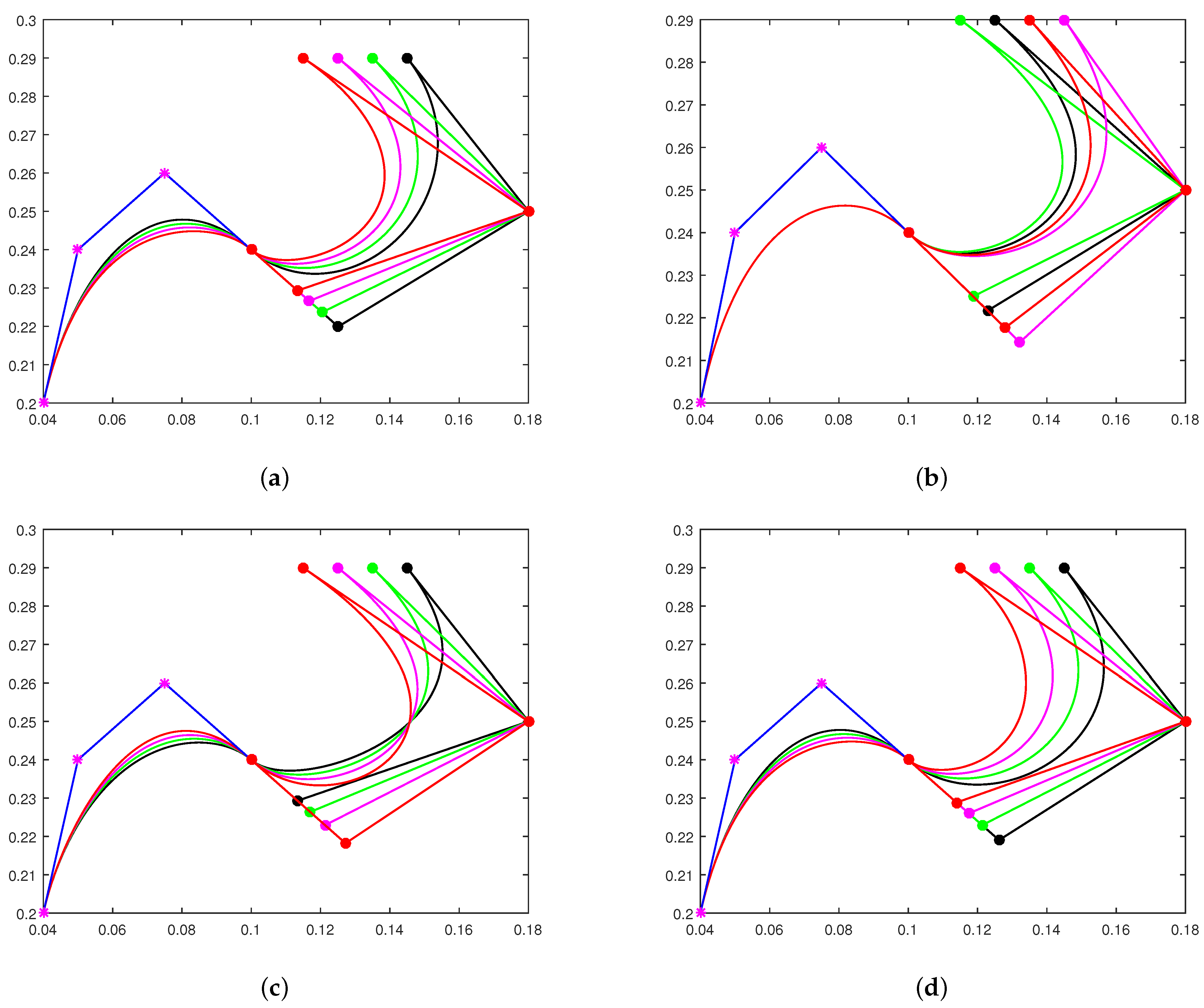
In Figure 2, control points and were selected to construct curves. Through the continuity condition, and could be obtained. The last two control points and could be freely selected according to our needs. All these multiple thin and dotted curves could be attained by the variation of shape parameters. The different values of shape parameters are mentioned underneath the figures.The shape parameters in the graph appear in the form of array. The first four groups and the last four groups correspond to the curve colors in the graph: black, green, purple, and red.
Figure 2.
continuity of the C-Bézier curve by multi-valued shape parameters. (a) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (b) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (c) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (d) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,).
- 2.
- continuity of cubic C-Bézier curves with parameters.We elaborate on the continuity of the curves, and, for continuity, we again consider two cubic C-Bézier curves given with three different shape parameters in Equation (14). We can also use the continuity constraints to construct various complex curves.
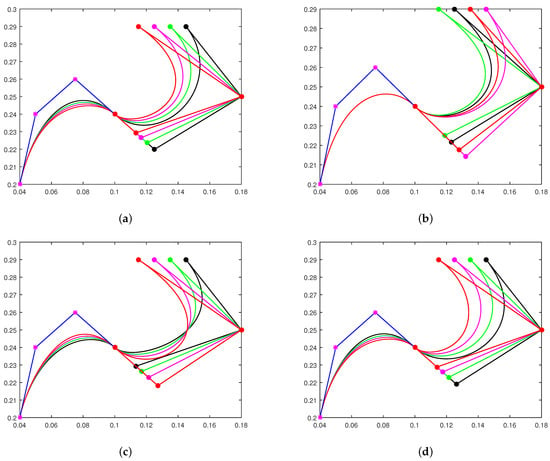
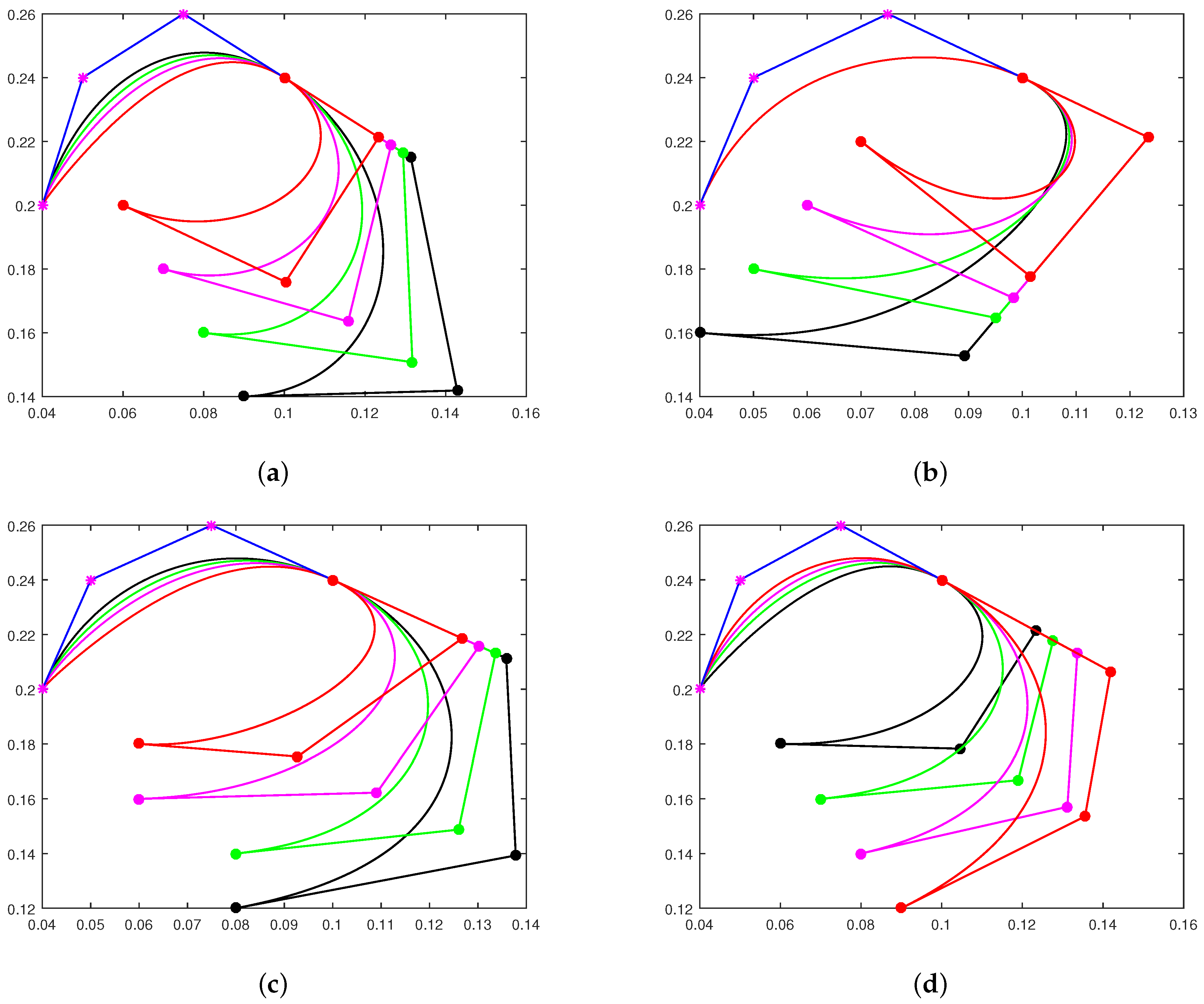
Example 2.
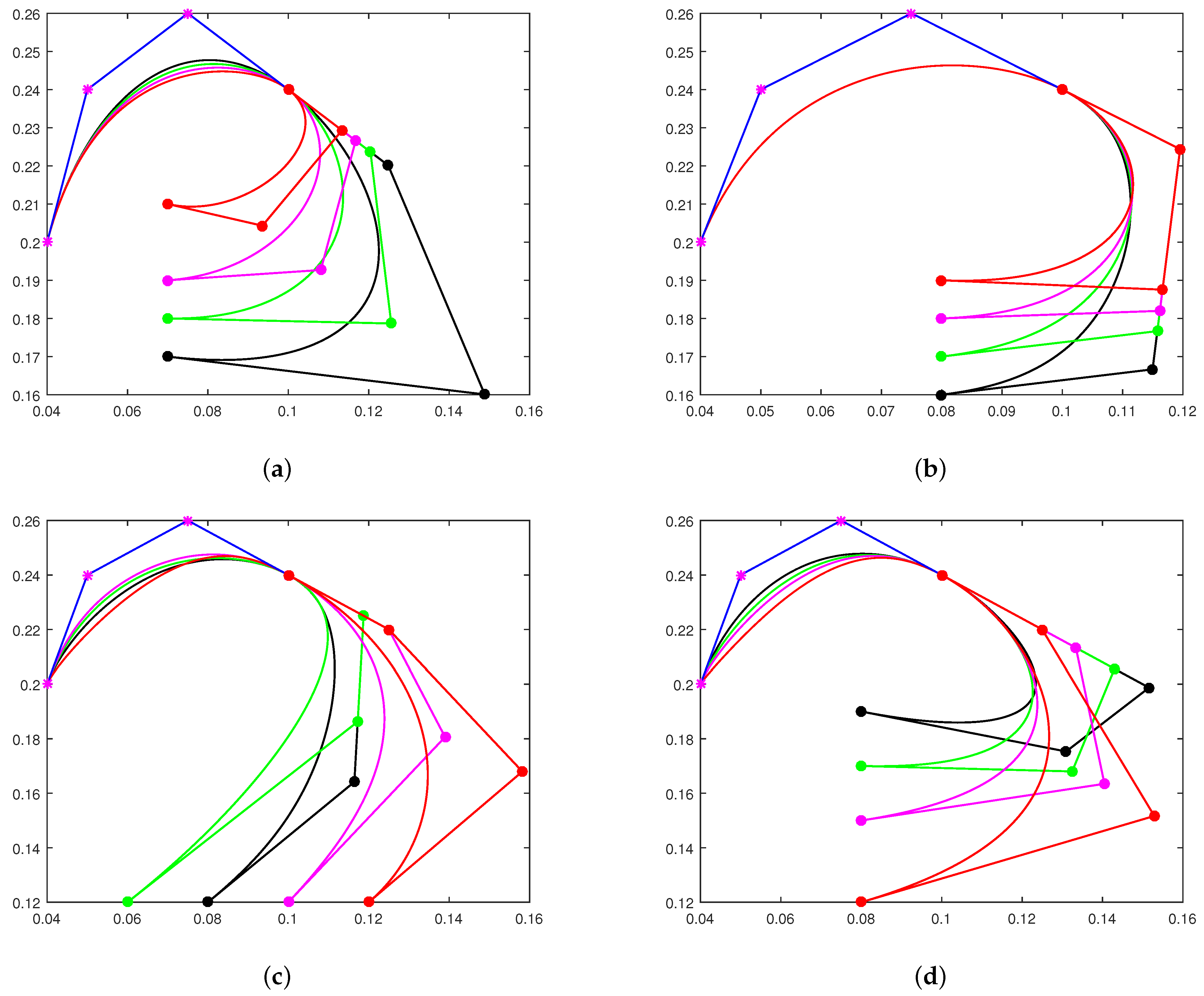
In Figure 3, control points and were selected to construct curves. Now, by using continuity conditions, the graphical representation of curves is presented. The last one control points of the second curve have to be taken according to our own choice. The different values of shape parameters are mentioned underneath the figures. The shape parameters in the graph appear in the form of array. The first four groups and the last four groups correspond to the curve colors in the graph: black, green, purple, and red.
Figure 3.
continuity of the C-Bézier curve by multi-valued shape parameters. (a) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (b) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (c) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (d) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,).
4.2. Algorithm for the Construction of Curves by Geometric Continuity Constraints
Like parametric continuity, we present an algorithm for constructing complex curves with geometric continuity constraints. The procedure for constructing the geometric continuity between two C-Bézier curves segments is as follows:
- I.
- For C-Bézier curve of degree n, we consider the first curve with shape parameters like and its control points.
- II.
- By keeping and equal, we obtain the control point for continuity, i.e., , and the remaining control points of the second curve will be chosen according to the designer’s choice.
- III.
- Similarly, for continuous, both the first and final curve segments with their tangent vectors will be equal at the last and first point of the domain, respectively. An extra positive scale factor will be added with the tangent vector of the second curve as to obtain for continuity. The remaining control points will be left to the designer’s choice, and a new curve will be obtained smoothly by using this condition.
- IV.
- Finally, for continuity, continuity is first guaranteed, and then control point is obtained through . Meanwhile, the remaining control points of the second curve are freely selected.
- 1.
- continuity of cubic C-Bézier curves with parameters.
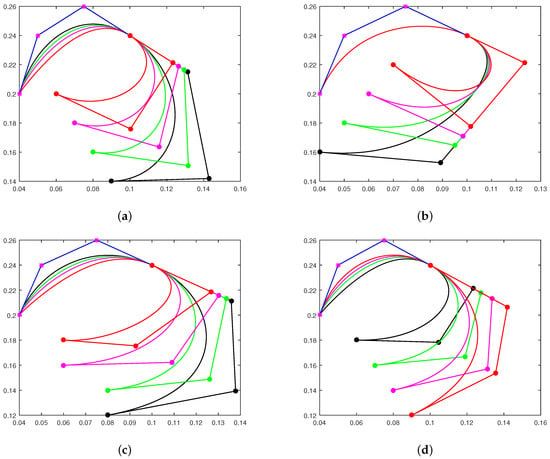
Example 3.
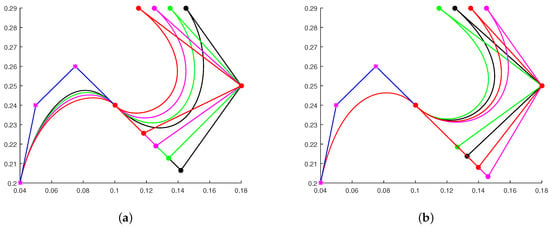
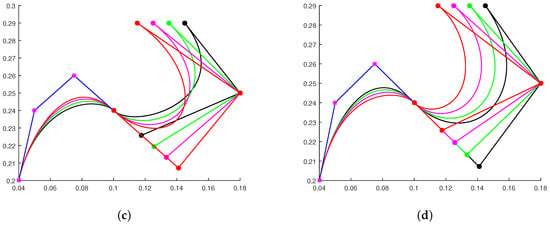
Figure 4 depicts the graphical representation of the smooth continuity between two cubic C-Bézier curves (the same as defined above for parametric continuity).
Figure 4.
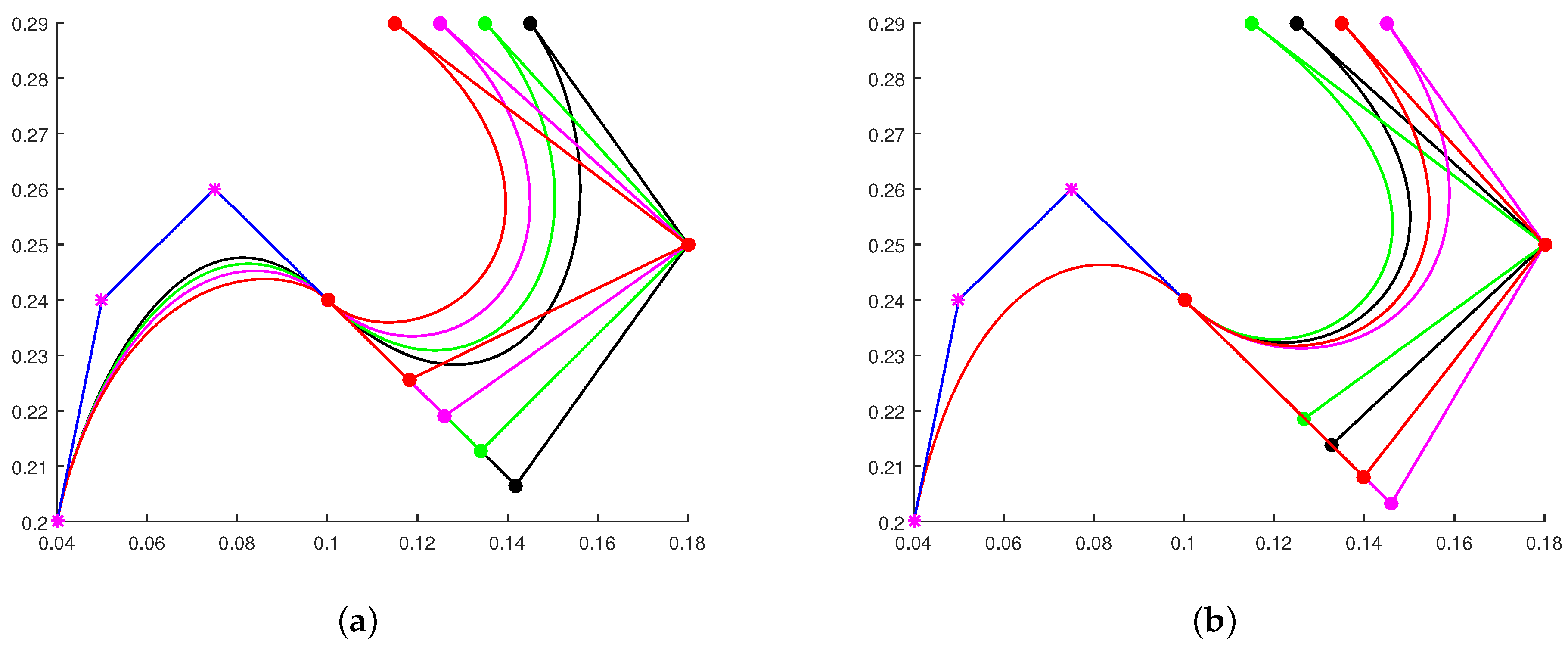
continuity of the C-Bézier curve by multi-valued shape parameters. (a) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (b) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (c) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (d) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,).
- In Figure 4, control points and were selected to construct curves. In addition, is the scale factor, which has a positive value, and it is well worth modifying the shape of the curve. Through the continuity condition, and could be obtained, while the remaining control points would be taken according to our own will. All of these multiple thin and dotted curves could be attained by the variation of shape parameters. The different values of shape parameters are mentioned underneath the figures. The shape parameters in the graph appear in the form of array. The first four groups and the last four groups correspond to the curve colors in the graph: black, green, purple and red, where in the figure. Therefore, by varying the values of shape parameters, we can see the changes in the curves given in Figure 4.
- 2.
- continuity of cubic C-Bézier curves with parameters.
Example 4.
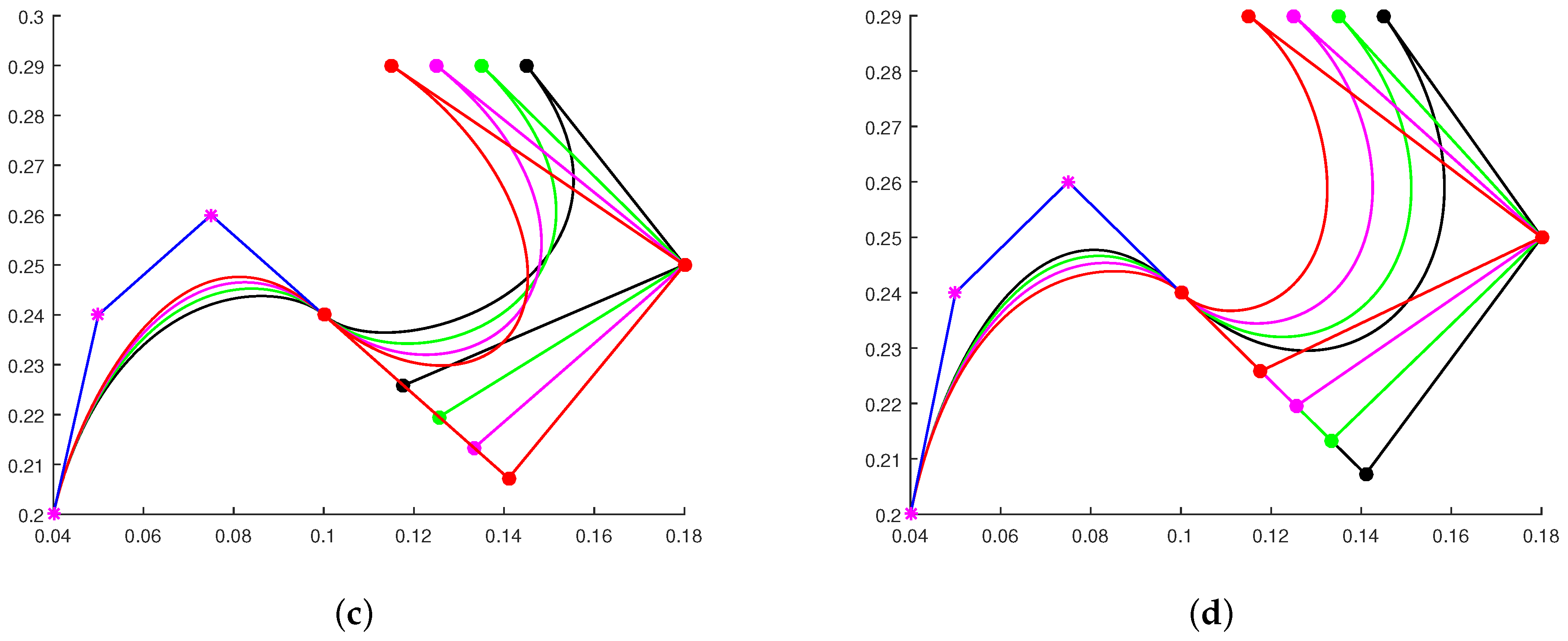
The continuity of the curve has much more freedom compared to the continuity. Figure 5 represents the smooth continuity between two cubic C-Bézier curves. In this figure, the control points and were chosen to construct the thin colored lines of Figure 5. Now, by using continuity conditions, the graphical representation of curves is presented. The last control points of the second curve have to be taken according to our own choice. The different values of shape parameters are mentioned underneath the figures. The parameter ϕ in all figures is all selected as 0.8. Multiple shape parameters were used to construct the various curves given in Figure 5.
Figure 5.
continuity of the C-Bézier curve by multi-valued shape parameters. (a) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (b) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (c) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,); (d) (,,), (,,), (,,), (,,): (,,), (,,), (,,), (,,).
5. Geometric Continuity of C-Bézier Surface with Parameters
Similar to the classical Bézier surface, a form of C-Bézier tensor product Bézier surface with parameters can be obtained by blending a C-Bézier curve which was associated with multiple different parameters.
Definition 2.
For control mesh points , such that the C-Bézier surface of order in the form of tensor product can be demonstrated as:
where and are C-Bézier basis functions associated with multi valued shape parameters ().
For designing of complex figures and various modeling purposes, we discussed continuity constraints between two adjacent C-Bézier curves in Section 3. Now, it is time to elaborate continuity for C-Bézier surfaces. The need to reach continuity after continuity is to get high smoothness for construction of complex figures. Thus, continuity must possess and continuity first. In order to facilitate our discussion, we consider two adjacent C-Bézier surfaces with shape parameters as follows:
where and are the control points of C-Bézier surfaces and respectively. continuity conditions between two adjacent C-Bézier surfaces can be discussed in two different ways as follows.
Smooth G2 Continuity for C-Bézier Surfaces with Parameters in the S Direction
Theorem 1.
Consider two C-Bézier surfaces and , and they meet the smooth continuity condition in the s direction if it satisfies all the following continuity constraints:
hold, where ϕ is any positive real number.
Proof.
When two adjacent C-Bézier surfaces satisfy the smooth continuity condition, the and continuity conditions must be satisfied at the joint first. In brief, two C-Bézier surfaces must have a common boundary and common tangent plane. For the continuity condition of C-Bézier surfaces, we have
After simplifying the above conditions, the following boundary points are obtained. Now, for the smooth continuity condition of , any two adjacent C-Bézier surfaces have a common tangent plane at a joint point of the common boundary, i.e., there is a continuous tangential derivative at the boundary point, and the following conditions should be satisfied:
By further simplification according to [21], Equation (18) can be simplified as follows:
where is any real constant. By calculating the above values, we have
which are the values required by the continuous condition of smooth in the s direction.
Similarly, for the continuity of in the s direction, the two surfaces must possess the same normal curvature at common boundary [22,23] and satisfy
where and are any real constants, and and are linear functions. For our convenience and useful calculation, we consider . Thus, Equation (21) can be simplified as follows:
By calculating the above values, we have
which satisfies the continuity conditions of the C-Bézier surface in the s direction and gives the values of the required control mesh points. □
6. Examples for the Construction of C-Bézier Surfaces with Parameters by G2 Continuity
By using the continuity of C-Bézier surfaces, various figures can be constructed. The influences of parameters are shown in the figures. In this section, we discuss the construction of surfaces by continuity conditions between any two adjacent C-Bézier surfaces in the s direction (the t direction can also be discussed in a similar way).
By concluding the proof of Theorem 1, the steps are given as follows:
- 1.
- Consider any two C-Bézier surfaces such as and .
- 2.
- Let ; both surfaces possess a common boundary and satisfy the continuity condition.
- 3.
- For any value of , and by having multiple shape control parameter values, Equation (20) can be used to calculate the second row of control mesh points to meet the continuity requirement. The remaining control mesh points can be taken according to the designer’s choice.
- 4.
- For any constant value of , the control mesh points in the third row can be calculated using Equation (23), which are the required control points for continuity. Furthermore, for the continuity condition, the previous two conditions ( continuity and continuity) must be satisfied.
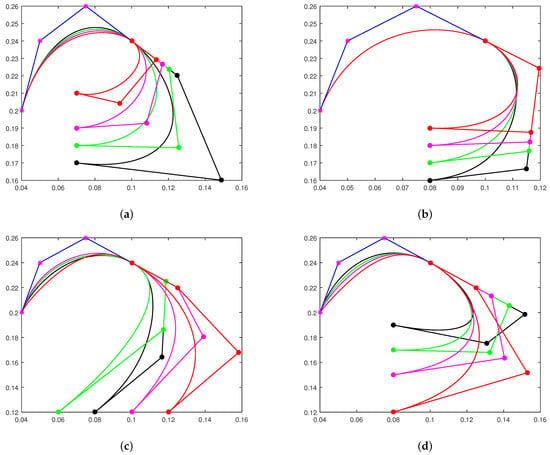
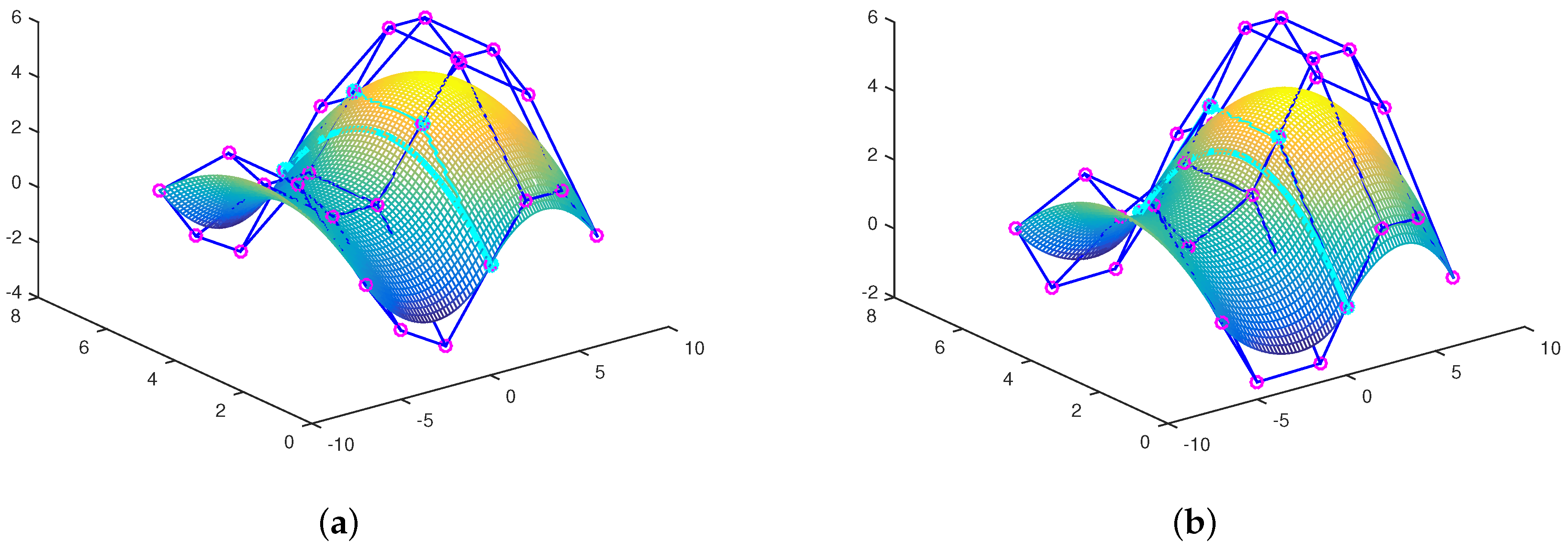
Example 5.
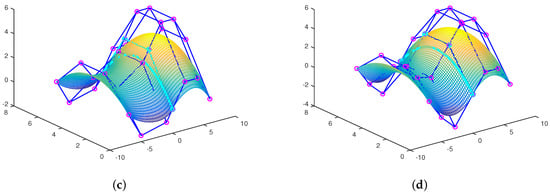
Consider any two adjacent C-Bézier surfaces of order where . These two surfaces satisfy continuity conditions if they have a common boundary and common tangent plane. The first eight control points can be obtained by using the above steps. The control mesh points (as in Equation (23)) of a common boundary in Figure 6 can be obtained by using the procedure of step 1 above. Similarly, the control points for common tangent plane can also be obtained by using the third step given in step 2 above, while the remaining control points depend on designer’s choice. Different shape parameters are given under each graph and, by varying these shape parameters in their domain, the influence on the shapes can be shown (where ).
Figure 6.
continuity of C-Bézier surfaces with different shape parameters and scale factors. (a) ; (b) ; (c) ; (d) .
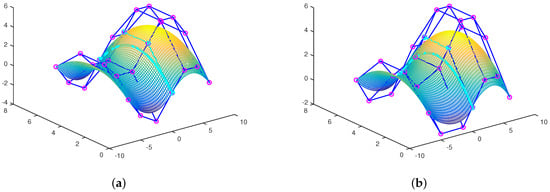
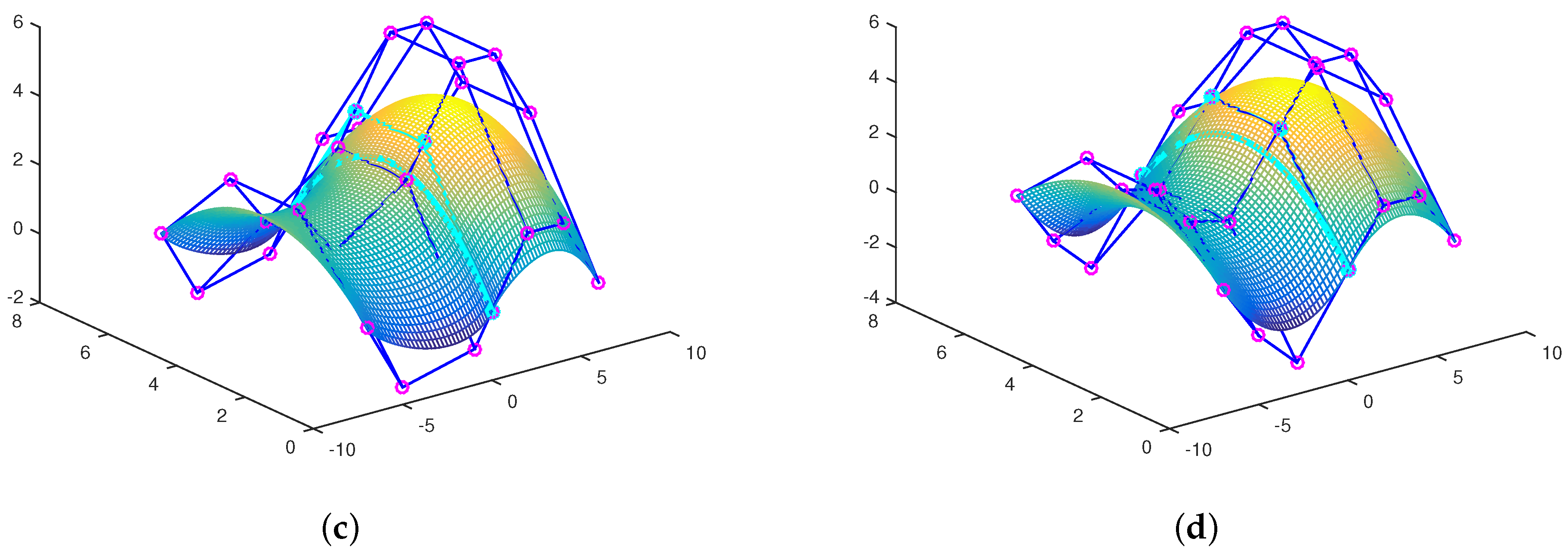
Example 6.
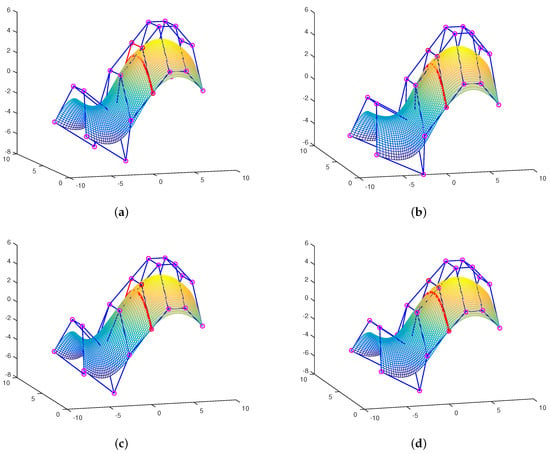
Figure 7 represents the continuity between two adjacent C-Bézier surfaces. These four figures can be obtained by varying the values of shape control parameters in their domain, and are mentioned under each figure (where ). The first 12 control mesh points can be obtained by using Equation (23), and the remaining four control mesh points can be taken according to the designer’s choice.
Figure 7.
continuity of C-Bézier surfaces with different shape parameters and scale factors. (a) ; (b) ; (c) ; (d) .
7. Conclusions
We know that C-Bézier curves and classical Bézier curves are very useful for image processing, graphics, and font designing. We can only draw a straight line with two points. However, when the number of control points is increased, we can obtain any curve shape. Moreover, when it comes to the modeling of complex figures and font designing, only a single C-Bézier curve is not enough. In order to solve this issue, the parametric continuity and geometric continuity conditions ( and continuity) between any two C-Bézier curves are derived. The changes of figures under multiple shape parameters are also given by us. This method can obtain curves without increasing mathematical complexity, which is more valuable in practical applications.
Moreover, this paper also proposed a C-Bézier surface with the shape parameters. C-Bézier surfaces have multiple different shape parameters, so they can be modified not only by changing the control points but also by varying the values of shape parameters in their domain. Compared with other surface formation techniques, the method proposed in this study is more practical, effective, flexible, and efficient in mathematical modeling. Finally, continuity constraints between two adjacent C-Bézier surfaces in different directions have been presented. Surface modeling by continuity conditions has also been given.
Author Contributions
Formal analysis, W.M.; Funding acquisition, C.L.; Investigation, Q.L.; Methodology, W.M.; Supervision, C.L.; Writing—original draft, W.M. All authors have read and agreed to the published version of the manuscript.
Funding
This work is partly supported by the Fundamental Research Funds for the Central Universities (No. DUT20LK13).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yip-Hoi, M.C. Teaching Surface Modeling to CAD/CAM Technologists. Am. Soc. Eng. Educ. 2011, 22, 1403.1–1403.12. [Google Scholar]
- Schmidt, R.; Singh, K. Sketch-Based Procedural Surface Modeling and Compositing. Eurographics 2008, 27, 321–330. [Google Scholar]
- Hering, L. Closed (C2 and C3 continuous) Bézier and B-spline curves with given tangent polygons. Comput. IEEE ACM Int. Conf. Comput. Aided Des. 1983, 15, 3–6. [Google Scholar] [CrossRef]
- Yan, L. Adjustable Bézier Curves with simple Geometric Continuity Conditions. Math. Comput. Appl. 2016, 14, 44. [Google Scholar] [CrossRef] [Green Version]
- Schneide, R.; Kobbelt, L. Discrete fairing of curves and surfaces based on linear curvature distribution. Curve Surf. Des. 1999, 1999, 371–380. [Google Scholar]
- Barsky, B.A.; Derose, T.D. Geometric continuity of parametric curves: Three equivalent characterizations. IEEE Comput. Graph. Appl. 1989, 9, 60–69. [Google Scholar] [CrossRef]
- Bashir, U.; Abbas, M.; Ali, J.M. The C2 and G2 rational quadratic trigonometric Bézier curve with two shape parameters with applications. Math. Comput. Appl. 2013, 219, 10183–10197. [Google Scholar] [CrossRef]
- Qin, X.; Hu, G.; Zhang, N.; Shen, X.; Yang, Y. A novel extension to the polynomial basis functions describing Bézier curve and surfaces of degree n with the multiple shape parameters. Math. Comput. Appl. 2013, 223, 1–16. [Google Scholar] [CrossRef]
- Misro, M.Y.; Ramli, A.; Ali, J.M. Quintic Trigonometric Bézier curve with two shape parameters. Sains Malays. 2017, 46, 825–831. [Google Scholar]
- BiBi, S.; Abbas, M.; Misro, M.Y.; Hu, G. A novel approach of hybrid trigonometric Bézier curve to the modeling of symmetric revolutionary curves and symmetric rotation surfaces. IEEE Access 2019, 7, 165779–165792. [Google Scholar] [CrossRef]
- BiBi, S.; Abbas, M.; Miura, T.K.; Misro, Y.M. Geometric modelling of novel generalized hybrid trigonometric Bézier-like curve with shape parameters and its applications. Mathematics 2020, 8, 967. [Google Scholar] [CrossRef]
- Hu, G.; Bo, C.C.; Qin, X.Q. Continuity conditions for Q-Bézier curves of degree n. J. Inequal. Appl. 2017, 115, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Ma, Y.; Huang, X. The cubic trigonometric Bézier curve with two shape parameters. Appl. Math. Lett. 2009, 22, 226–231. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Wu, J.; Qin, X. A novel extension of the Bézier model and its applications to surface modeling. Adv. Eng. Softw. 2018, 12, 27–54. [Google Scholar] [CrossRef]
- Sharma, R. A class of QT Bézier curve with two shape parameters. Int. J. Sediment Res. 2016, 5, 131–134. [Google Scholar]
- Hu, G.; Cao, H.; Wang, X.; Qin, X. G2 Continuity conditions for generalized Bézier-like surfaces with multiple shape partameters. J. Inequal. Appl. 2017, 1, 1–17. [Google Scholar]
- Zhang, J.W. C-curves: An extension of cubic curves. Comput. Aided Geom. Des. 1996, 13, 199–217. [Google Scholar] [CrossRef]
- Zhang, J.W. Two different forms of C-B-splines. Comput. Aided Geom. Des. 1997, 14, 31–41. [Google Scholar] [CrossRef]
- Chen, Q.Y.; Wang, G.Z. A class of Bézier-like curves. Comput. Aided Geom. Des. 2003, 14, 29–39. [Google Scholar] [CrossRef]
- Li, C.Y.; Zhu, C.G. Designing developable C-Bézier surface with shape parameters. Mathematics 2020, 14, 402. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.J.; Wang, G.Z.; Zheng, J.M. Computer Aided Geometric Design; China Higher Education Press: Beijing, China, 2001. [Google Scholar]
- Hu, G.; Ji, X.M.; Guo, L. The quartic generalized C-Bézier surface with multiple shape parameters and continuity condition. Mech. Ence Technol. Aerosp. Eng. 2014, 33, 1359–1363. [Google Scholar]
- Piegl, L.; Tiller, W. The NURBS Book; Springer: New York, NY, USA, 1997. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).