Abstract
In this paper, we consider a class of mathematical programs with switching constraints (MPSCs) where the objective involves a non-Lipschitz term. Due to the non-Lipschitz continuity of the objective function, the existing constraint qualifications for local Lipschitz MPSCs are invalid to ensure that necessary conditions hold at the local minimizer. Therefore, we propose some MPSC-tailored qualifications which are related to the constraints and the non-Lipschitz term to ensure that local minimizers satisfy the necessary optimality conditions. Moreover, we study the weak, Mordukhovich, Bouligand, strongly (W-, M-, B-, S-) stationay, analyze what qualifications making local minimizers satisfy the (M-, B-, S-) stationay, and discuss the relationship between the given MPSC-tailored qualifications. Finally, an approximation method for solving the non-Lipschitz MPSCs is given, and we show that the accumulation point of the sequence generated by the approximation method satisfies S-stationary under the second-order necessary condition and MPSC Mangasarian-Fromovitz (MF) qualification.
1. Introduction
The mathematical program with switching constraints (MPSCs) is a class of optimization problems which consider products of two functions as their sum of equality constraints. “Switching” means that the product of two functions is equal to 0 if and only if at least one of two functions equals 0. The current applications for switching structures appear in optimal control frequently [1,2,3] and optimization problems with either–or constraints [4]. In real world applications, switching structures naturally appear via modelling the bacteria switch instantaneously between active and dormant states [5], and modelling the state at the two boundary points to control a finite string to the zero state in finite time [6]. From the perspective of problem structure, mathematical programs with switching constraints (MPSCs) are closely related to mathematical programs with complementarity constraints (MPCCs) [7,8], mathematical programs with vanishing constraints (MPVCs) [9,10], and mathematical programs with cardinality constraints [11,12]. By the structures of MPCC and MPSC, we know that any MPCC is a special form of MPSC. There are many studies on MPCCs; as is known to all, standard constraint qualifications such as linear independence constraint qualification (LICQ) and Mangasarian–Fromovitz constraint qualification (MFCQ) do not hold at the feasible points of MPCCs due to the complementarity constraints. Similarly, LICQ and MFCQ also do not hold at the feasible points of MPSCs due to the switching constraints. In order to resolve this problem, Mehlitz [13] studied the (W-, M-, S-) stationarity and some MPSC-constraint qualifications and their relationships are given. Thereafter, there are some studies on the optimality conditions of MPSCs [14,15]. The solution methods of MPSCs at present are the relaxation method [16] and penalty methods [15,17,18].
Sparse solutions of systems have been widely used to seek a sparse solution in regression, feature selection in machine learning and compressed sensing [19,20,21,22]. In fact, finding the sparsest solutions is to find the solution which has the smallest number of nonzero components. The number of nonzero components of a vector z denoted as , the so-called -norm, is a nonconvex discontinuous function, usually approximated by -norm. The non-Lipschitz function is a better continuous approximation for -norm. Moreover, some smoothing methods [23,24,25,26] are provided for solving such problems. Guo and Chen [27] derived associated qualifications, necessary optimality conditions and an approximation method for MPCCs with the objective function involving a non-Lipschitz term. However, we know MPCC is a special structure of MPSC. Existing theory for MPCCs with a non-Lipschitz term are not applicable to MPSCs due to the switching constrains. In order to replenish this shortcoming, it is necessary to introduce the concepts of stationarity points and compatible constraint qualifications for MPSCs with the objective function involving a non-Lipschitz term. This is the central purpose of this paper. Our main contributions are summarized as follows.
- We prove that the basic qualification (BQ) fails at any feasible point of Equation (1) when D is full row rank.
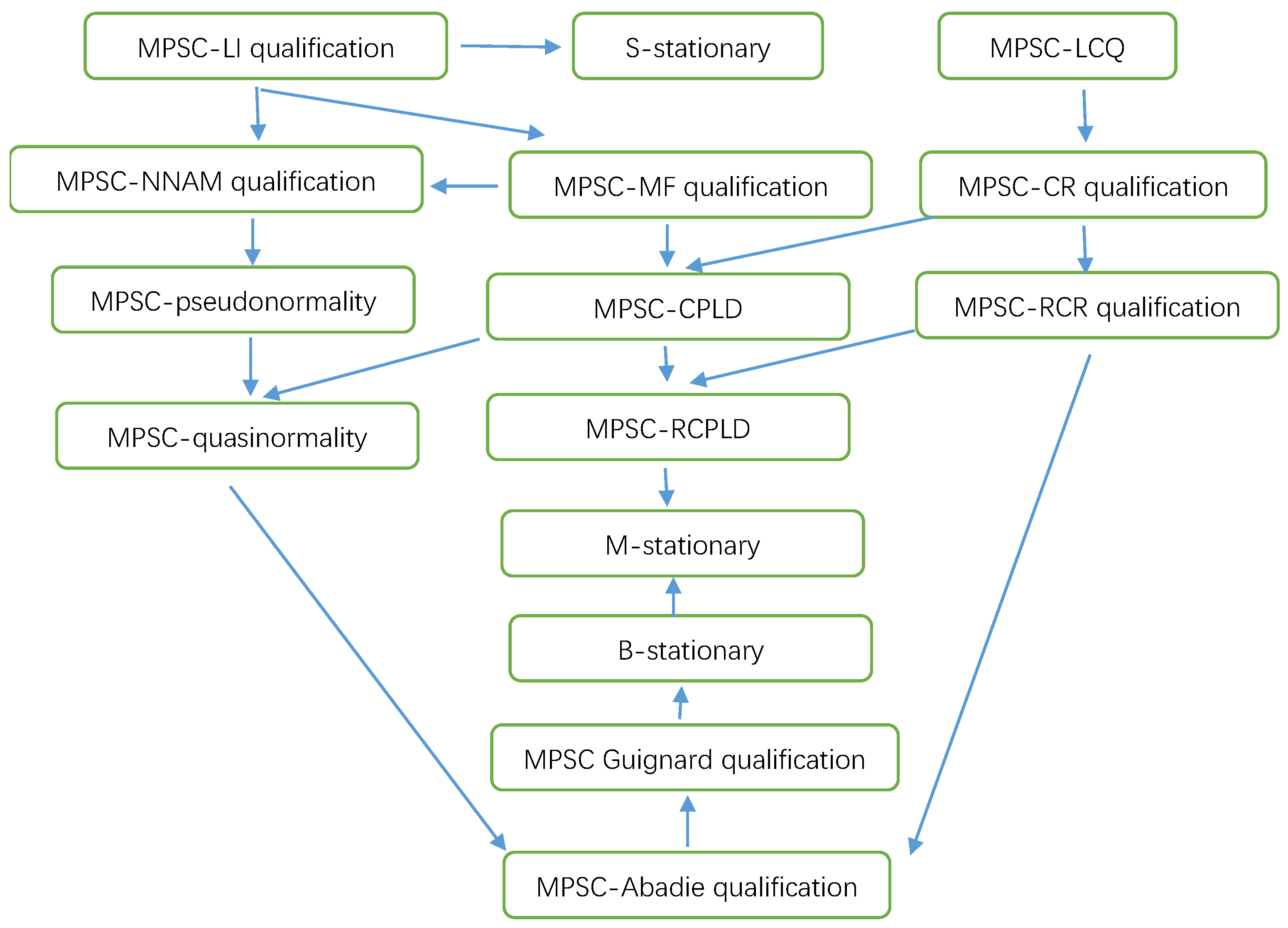
- We present the (W-, M-, B-, S-) stationarity conditions for Equation (1), propose 12 MPSC-tailored qualifications, and give the qualifications which can guarantee that M-stationarity and S-stationarity are necessary for local optimality of Equation (1), respectively. In addition, the diagram of the relations for 12 qualifications and (M-, S-) stationarity are given.
- We propose an approximation method for solving problem Equation (1), in which a local Lipschitz function is used to approximate the non-Lipschitz term. We show that any accumulation point of the sequence generated by our method is W-stationary under MPSC-MF qualification, and is S-stationary under second-order necessary condition and MPSC-MF qualification.
The rest of this paper is organized as follows. In Section 2, the notations and preliminary definitions are given. In Section 3, we propose some qualifications which are related to the constraints and the non-Lipschitz term to ensure that local minimizers satisfy the necessary optimality conditions; and the relations among MPSC tailored qualifications are discussed. In Section 4, a relaxation scheme for solving the non-Lipschitz MPSCs is presented, and under the MPSC-LI qualification and second-order necessary condition, we can obtain its W-stationary and S-stationary. Conclusions are summarized in Section 5.
2. Notations and Preliminaries
In order to facilitate the reading of this article, some notations are given first:
| Set of natural numbers | The regular normal cone of A at x | ||
| Set of real numbers | The limiting normal cone of A at x | ||
| Set of real n-vectors | The tangent cone of A at x | ||
| Set of real m × n-matrices | The regular subdifferential of at x | ||
| A norm | The gradient of at x | ||
| p norm | The limiting subdifferential of at x | ||
| Transpose of matrix D | The horizon subdifferential of at x | ||
| span D | The spanning set of set D | The Hessian Matrix of at x | |
| Inner product | Index set of non-zero elements of A |
The following notation will be used throughout this paper. Given a nonempty closed set A and a point .
Definition 1.
(Regular normal cone) The regular normal cone of A at is defined as
where means that as .
Definition 2.
(Limiting normal cone) The limiting normal cone of A at is defined as
Definition 3.
(Tangent cone) The tangent cone of A at is defined as
Given a continuous function and a point , we recall the definitions of regular subdifferential, limiting subdifferential, and horizon subdifferential [28] (Definition 8.3).
Definition 4.
(Regular subdifferential) The regular subdifferential of ψ at is defined as
Definition 5.
(Limiting subdifferential) The limiting subdifferential of ψ at is defined as
Definition 6.
(Horizon subdifferential) The horizon subdifferential of ψ at is defined as
It is worth noting that if function is strictly continuous at [28] (Theorem 9.13); and if is continuously differential at [28] (Exercise 8.8).
3. The Non-Lipschitz MPSCs and Their Optimality Conditions
We mainly consider the MPSCs with the objective function involving a non-Lipschitz term as below
where all functions are continuously differentiable for all , , , and D is a given real matrix in , and . We call the switching constraint since functions are active at least one, that is to say, the last l constraints in problem (1) force or for all at any feasible point of (MPSC). Denote the feasible set of problem (1) by . Comparing with the classical MPSCs, the difficulty of problem (1) is to deal with the term which is non-convex and non-Lipschitz when . The basic qualification (BQ) of problem (1) holds at if . The BQ ensures the validity of the sum rule of the subdifferentials of the objective function F and an indicator function, which plays an important role in deriving necessary optimality conditions for problem (1).
3.1. Stationary Conditions and Qualifications
We derive three different stationarity notions of problem (1) which are not stronger than the associated KKT conditions. We first introduce some index sets of a feasible point of problem (1), is the transpose of the ith row of D:
If there is no ambiguity, we abbreviate the above sets to .
Note that the index sets are a partition of , i.e., , . In [13] (Lemma 4.1), we know that MFCQ and LICQ are violated at when .
Denote , for any , the following formulas are valid [13] (Lemma 3.2):
Next, we would like to prove that the BQ fails for problem (1) at any nonzero feasible point, and the following lemma is crucial for the proof.
Lemma 1.
Let . Then for any with , , , , and , , we have that
Proof.
For the normal cone, define sets and , then . From [28] (theorem 6.14) and the definition of normal cone, we have
where , . According to in Equation (2), then
We let with . Then the result follows immediately form the above formulas. □
Proposition 1.
Let and . Assume that D is full row rank. If there exists a vector with such that
then the BQ fails at for problem (1).
Proof.
From Lemma 1 where for all with , , and , there is
Combine with the assumption Equation (3) with such that
It is clear that since D is full row rank. Now let and which imply . By [28] (Exercise 10.7), we have
where
by [27] (euqation (2.2)). Moreover, by [28] (Exercise 8.8(c)), it follows that
Thus the BQ fails at point and the proof is complete. □
3.1.1. The Stationary Condition
We give four stationary conditions for problem (1). However, first we introduce a tangent cone and a sign function. The MPSC-tailored linearized tangent cone of problem (1) is defined as
and for any , the sign function of is denoted as
Definition 7.
- weak stationary (W-stationary) point if there exist multipliers such that
- Mordukhovich-stationary (M-stationary) point if there exist multipliers such that Equation (8) holds and satisfies the condition:
- Bouligand-stationay (B-stationary) point if for , the following condition holds:
- strongly stationary (S-stationary) point if there exist multipliers such that Equation (8) holds and satisfies the condition:
Theorem 1.
Proof.
(i) Let be an S-stationary point of problem (1); there exist multipliers satisfying Equations (8) and (11). Then for any , denote ; we have
By contradiction, if is not a B-stationary point of problem (1), which means that there exist such that . From Equations (6) and (11), we get
which is a contraction.
(ii) Let be a B-stationary point of problem (1). For , we have , which means that is an optimal solution of
By Theorem 1 and Definition 7, the following relations hold easily
3.1.2. The Qualifications
Notice that is non-convex and non-Lipschitz when , we need to consider the appropriate subdifferentiable and constraint qualification to ensure that a minimizer of problem (1) is a stationary point.
Let be the set of all the disjoint bipartitions of . For fixed , we reformulate problem (1) as the following
Denote as the feasible set of problem (13).
Lemma 2.
Proof.
Assume that is a local minimizer of problem (1). If the set , problem (13) is equivalent to problem (1), and the lemma is clearly true. Otherwise, there exists , but the point is not a local minimizer of problem (13). Hence there exists such that . By the feasibility of , we know that and . Thus, , which is a contradiction of , a local minimizer of problem (1).
Conversely, is a local minimizer of problem (13). We assume that is not a local minimizer of problem (1); there exists a point such that . By the feasibility of , we know , which implies or . Let , and there exists a partition such that is a feasible point of problem (13) and , which is a contradiction of , a local minimizer of problem (13). The proof is complete. □
Here, we give some qualifications of problem (1).
Definition 8.
Let . We say
- (a)
- MPSC linear independence (MPSC-LI) qualification holds at for problem (1) if the following gradients are linearly indepedent:
- (b)
- MPSC linear constraint qualification (MPSC-LCQ) holds if all functions in the constraints are affine.
- (c)
- MPSC Mangasarian-Fromovitz (MPSC-MF) qualification holds at iff there are no nonzero multipliers such that
- (d)
- MPSC no nonzero abnormal multiplier (MPSC-NNAM) qualification holds at iff there are no nonzero multipliers such that
- (e)
- MPSC constant rank (MPSC-CR) qualification holds at if there exists such that, for any , , , , and , the gradientshas the same rank for each .
- (f)
- MPSC relaxed constant rank (MPSC-RCR) qualification holds at if there exists such that, for any , , , the gradientshave the same rank for each .
- (g)
- MPSC constant positive linear dependent (MPSC-CPLD) holds at if, for any , , , , and , whenever there exist multipliers , not all zero, with for each and for each , such thatthere exists such that, for any , the vectorsare linearly dependent.
- (h)
- Let , , , and , be such that is a basis for span . MPSC relaxed constant positive linear dependence (MPSC-RCPLD) holds at if there exists such that
- has the same rank for ;
- for any , , if there exist multipliers , not all zero, with for each and for each , such thatthen for any , the following vectors are linearly dependent:where
- (i)
- MPSC pseudonormality holds at if there are no nonzero multipliers such that
- ;
- , , , and for ;
- there exists a sequence such that, for each k
- (j)
- MPSC quasinormality holds at if there are no nonzero multipliers such that
- ;
- , , , and for ;
- there exists a sequence such that, for each k
- (k)
- MPSC Abadie qualification holds at if , where
- (l)
- MPSC Guignard qualification holds at if .
In the following, we show that is an S-stationary point of problem (1) when MPSC-LI qualification holds at , and is an M-stationary point of problem (1) when MPSC-RCLPD holds at .
Theorem 2.
Proof.
Assume is a locally optimal solution of problem (1) and by Lemma 2, is a local minimizer of problem (13). Note that for all , it is easy to see that the objective function of problem (13) is continuously differentiable at . By the assumption that MPSC-LI qualification holds at point , i.e.,
which implies that LICQ holds at point for problem (13). Then for , there exist multipliers satisfying
and for , there exist multipliers satisfying
Before we prove the following theorem, we give two lemmas in [28,29].
Lemma 3.
[28] A vector iff there exists a smooth function ϕ such that and .
Lemma 4.
[29] Let where is linearly independent and for each . Then there exist and , such that with for each and is linearly independent.
Theorem 3.
Proof.
Assume is a locally optimal solution of problem (1) and by Lemma 2, is a local minimizer of problem (13). Let , . For each , we consider the following optimization problem
where and . Since the set is compact and is continuous, problem (18) has at least one optimal solution, denote as . Next, we show that as . By the optimality at point , we have for all , that is
By the compactness of , is bounded, which implies that
Note that by the feasibility of for problem (13) and local optimality of ; thus the whole sequence converges to .
Without loss of generality, we assume that is an interior point of for all . Due to Fermat’s rule, for
where
by Equation (2). On the basis of Equation (21), we obtain that
where , , , , , and
From Equations (21) and (23), it is easy to obtain . For convenience, we define the index sets as follows
and it is obvious that and for each k sufficiently large. Define , then by Equations (22) and (23), we have
where
Let , , , and be index sets such that is a basis for . Because satisfies the MPSC-RCPLD, there exists a constant such that the rank of is constant for each . Hence is a basis for span as k sufficiently large. From Lemma 4, there exist , , and such that
and the vectors are linearly independent for sufficiently large k. Set , and by Lemma 4 follows that and . We assume that , , for sufficiently large k; then the vectors
are linearly independent, and it is easy to obtain , with . Denote
Now, we show that is bounded. By contraction, assume ; then there exists a subsequence such that for any ,
Dividing Equation (24) by , and taking the limit as , we have
Furthermore, , following that by and the outer semi-continuity of limiting normal cone, which give a contradiction with MPSC-RCPLD. Therefore, is bounded. There exists a subsequence such that for any ,
and from Equation (24) it follows that
Note that , and which implies that . It is easy to verify that satisfies the definition of M-stationary in definition 7 and the proof is complete. □
Theorem 4.
3.1.3. The Relation between Various Qualifications
By Definition 8, the following relations are obtained immediately,
MPSC-LI qualification ⇒ MPSC-MF qualification ⇒ MPSC-NNAM qualification ⇒ MPSC-pseudonormality ⇒ MPSC-quasinormality; MPSC-LI qualification ⇒ MPSC-CR qualification ⇒ MPSC-RCR qualification; MPSC-LCQ ⇒ MPSC-CR qualification; MPSC-CPLD ⇒ MPSC-RCPLD; MPSC-Abadie qualification ⇒ MPSC Guignard qualification.
Next, we show that MPSC-CR qualification(RCR qualification) ⇒ MPSC-CPLD (RCPLD), and MPSC-quasinormality ⇒ MPSC-Abadie qualification.
Theorem 5.
If the MPSC-CR qualification holds at , then MPSC-CPLD holds at . If the MPSC-RCR qualification holds at , then MPSC-RCPLD holds at .
Proof.
(i) Let the MPSC-CR qualification hold at . Let , , , , and . Assume that there exist multipliers , not all zero, with for each and for each , such that
which means that the vectors
are linearly dependent at . By the MPSC-CR qualification, there exists , for any , the vectors of Equation (26) have the same rank, implying that they are linearly dependent at . Thus, MPSC-CLPD holds at .
(ii) Assume MPSC-RCR qualification holds at . Let , , and be such that is a basis for span . Let , be such that there exist multipliers , not all zero, with for each and for each , such that
which means that
are linearly dependent at . Note that and have the same rank. Combine the MPSC-RCR qualification; there exists such that the vectors of Equation (27) have the same rank at , meaning that they are linearly dependent. Thus, MPSC-RCPLD holds at and the proof is complete. □
Theorem 6.
If the MPSC-quasinormality holds at , the MPSC-Abadie qualification holds at .
Proof.
Finally, we summarize the relations between the qualifications of non-Lipschitz MPSC in Figure 1.
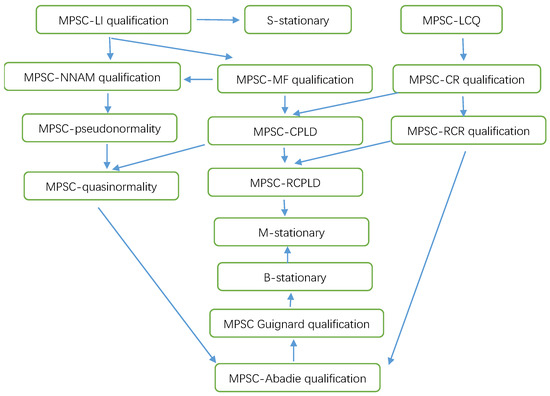
Figure 1.
Relations between various qualifications.
4. The Approximation Method for the Non-Lipschitz MPSC Problem
The non-Lipschitz term and switching constraints make problem (1) difficult to solve. Here, we propose the relaxation method to problem (1) as follows
Here, the non-Lipschitz term is approximated by a local Lipschitz function
where . The feasible region denotes
This is the Scholtes global relaxation method, see [31], and is used in mathematical programs with switching constraints, see [16] (Section 3).
Theorem 7.
Proof.
Noting that is a KKT point of problem (28), we can find multipliers , , and which satisfy the conditions as follows
where , and . For each and , we define multipliers as stated below:
and . Thus, we obtain
We next show that the sequence is bounded. It is worth noting that for , since and , and is bounded for . Hence, we just show the boundness of . In contrast, we assume that when . Thus, and . Note that by the continuity of g for sufficiently large . Dividing Equation (30) by and taking the limit , we obtain
Therefore, we can yield , , , , and by the assumption that the MPSC-MF qualification holds at , which is defined as (a) of Definition 8. Hence, holds for at least one index . Without loss of generality, we assume , then we have . Besides, we have
which is a contradiction since . As a consequence, the sequence is bounded.
In some cases, even if the MPSC-LICQ is valid for the relaxation (28), a better solution may not be obtained than the W-stationary point. Study [16] (Example 3.3) has illustrated this point. Note that the second-order necessary condition is not valid at the stationary point . Consider its relaxation scheme similar to problem (28):
The first-order necessary condition is
and the second-order necessary condition is
where
Concerning problem (31), there are stationary points and . In fact, the constraint is active and is inactive at point . Hence, the corresponding multipliers and . Now, we verify that second-order necessary condition fails at . For , , we have . Then, the second-order necessary condition
Note that t is sufficiently small; then , which implies that the second-order necessary condition is not valid at .
However, for points , the corresponding multipliers and . For all , the second-order necessary condition
Furthermore, we know that the limit points of are and , which are S-stationary for the problem in [16] (Example 3.3).
Definition 9.
We say, for problem (28), the second-order necessary condition holds at if there exists d such that
where
Theorem 8.
Let be a sequence of positive relaxation parameters converging to zero. For each , let be a KKT point of problem (28), and the sequence converges to a point . Assume that the second-order necessary condition holds at for all large k and the MPSC-MF qualification holds at . Then is an S-stationary point of problem (1).
Proof.
In the proof of Theorem 7, we have shown that is a W-stationary point under the MPSC-MF qualification condition. Assume to the contrary that is not an S-stationary point. There must exist such that or . Without loss of generality, we assume . Let
and
The index sets and for all k sufficiently large; then we have that and . By the MPSC-LI qualification at , it follows that the limit of the matrix sequence has full row rank. Hence, has full rank for all k sufficiently large. Let , which satisfies . Furthermore, the sequence is convergent since with by the definitions of and in the proof of Theorem 7, which means that is bounded. In the following, we show the second-order derivatives of the objective and constraints for problem (28). Let , for , we know ; then we have
From and Equation (32) we obtain that for all sufficiently large k.
We next show that as , which contradicts the second-order necessary condition at when k is sufficiently large. Note that for all , we have that
Since , are bounded, and for all , it is easy to verify that the sequence is bounded. For the constraints, we can obtain
Note that and according to Equation (29). In the proof of Theorem 7, we proved that , , and are all bounded. Since is bounded, it is not hard to see that the top four items in Equation (33) are all bounded. At the same time, by and the definitions of and , we have
Since and , the term as . Thus, as . Together with the boundness of , which contradicts the second-order necessary condition. Thus, .
Similarly, we can show that . Furthermore, the second-order necessary condition holding at point implies that and vanished at the same time. The proof is completed. □
5. Conclusions
In this paper, we study optimality conditions and qualifications for non-Lipschitz MPSCs. Our theoretical investigations enrich the landscape of available qualifications in the field of non-Lipschitz MPSCs. Moreover, we present an approximation method similar as Scholtes’ relaxation scheme. Theoretically, the accumulation point of the sequences produced by our method is a stationary point under certain conditions, however, there is no efficient computational solution method to solve it. Referring to the existing algorithms, some penalty methods for MPSCs do not apply for the non-Lipschitz term, and some smoothing methods for non-Lipschitz optimization do not take into account the switching constrains. Hence, combing the penalty method and the smoothing method to propose an efficient method to solve the non-Lipschitz MPSCs will be interesting and meaningful work in the future.
Author Contributions
Conceptualization, methodology, writing—original draft preparation and writing—review and editing, J.L.; methodology, writing—review and editing, Z.P.; writing—original draft preparation, Z.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was partially supported by the Natural Science Foundation of China (Grant No. 11871383, 12001260).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liberzon, D. Switching in Systems and Control; Birkhäuser: Boston, MA, USA, 2003. [Google Scholar]
- Sager, S. Reformulations and algorithms for the optimization of switching decisions in nonlinear optimal control. J. Process Control 2009, 19, 1238–1247. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Yan, Q. Time optimal controls of semilinear heat equation with switching control. J. Optim. Theory Appl. 2015, 165, 263–278. [Google Scholar] [CrossRef]
- Sarker, R.A.; Newton, C.S. Optimization Modelling; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Seidman, T.I. Optimal control of a diffusion/reaction/switching system. Evol. Equ. Control Theory 2013, 2, 723–731. [Google Scholar] [CrossRef]
- Gugat, M. Optimal switching boundary control of a string to rest in finite time. ZAMM J. Appl. Math. Mech. 2008, 88, 283–305. [Google Scholar] [CrossRef]
- Luo, Z.Q.; Pang, J.S.; Ralph, D. Mathematical Programs with Equilibrium Constraints; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Outrata, J.V.; Kocvara, M.; Zowe, J. Nonsmooth Approach to Optimization Problems with Equilibrium Constraints: Theory, Applications and Numerical Results; Kluwer Academic Publishers: Boston, MA, USA, 1998. [Google Scholar]
- Achtziger, W.; Kanzow, C. Mathematical programs with vanishing constraints: Optimality conditions and constraint qualifications. Math. Program. 2008, 114, 69–99. [Google Scholar] [CrossRef]
- Sadeghieh, A.; Kanzi, N.; Caristi, G. On stationarity for nonsmooth multiobjective problems with vanishing constraints. J. Glob. Optim. 2021, 1–21. [Google Scholar] [CrossRef]
- Burdakov, O.P.; Kanzow, C.; Schwartz, A. Mathematical programs with cardinality constraints: Reformulation by complementarity-type conditions and a regularization method. SIAM J. Optim. 2016, 26, 397–425. [Google Scholar] [CrossRef] [Green Version]
- Červinka, M.; Kanzow, C.; Schwartz, A. Constraint qualifications and optimality conditions for optimization problemswith cardinality constraints. Math. Program. 2016, 160, 353–377. [Google Scholar] [CrossRef]
- Mehlitz, P. Stationarity conditions and constraint qualifications for mathematical programs with switching constraints. Math. Program. 2020, 181, 149–186. [Google Scholar] [CrossRef]
- Li, G.; Guo, L. Mordukhovich Stationarity for Mathematical Programs with Switching Constraints under Weak Constraint Qualifications. Available online: http://www.optimization-online.org/DB_FILE/2019/07/7288.pdf (accessed on 7 November 2021).
- Liang, Y.-C.; Ye, J.J. Optimality conditions and exact penalty for mathematical programs with switching constraints. J. Optim. Theory Appl. 2021, 190, 1–31. [Google Scholar] [CrossRef]
- Kanzow, C.; Mehlitz, P.; Steck, D. Relaxation schemes for mathematical programs with switching constraints. Optim. Methods Softw. 2019, 1–36. [Google Scholar] [CrossRef]
- Clason, C.; Rund, A.; Kunisch, K.; Barnard, R.C. A convex penalty for switching control of partial differential equations. Syst. Control Lett. 2016, 89, 66–73. [Google Scholar] [CrossRef] [Green Version]
- Clason, C.; Rund, A.; Kunisch, K. Nonconvex penalization of switching control of partial differential equations. Syst. Control Lett. 2017, 106, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Brodie, J.; Daubechies, I.; De Mol, C.; Giannone, D.; Loris, I. Sparse and stable Markowitz portfolios. Proc. Nat. Acad. Sci. USA 2009, 106, 12267–12272. [Google Scholar] [CrossRef] [Green Version]
- Bruckstein, A.M.; Donoho, D.L.; Elad, M. From sparse solutions of systems of equations to sparse modeling of signals and images. SIAM Rev. 2009, 51, 34–81. [Google Scholar] [CrossRef] [Green Version]
- Bian, W.; Chen, X. Linearly constrained non-Lipschitz optimization for image restoration. SIAM J. Imaging Sci. 2015, 8, 2294–2322. [Google Scholar] [CrossRef]
- Zeng, C.; Wu, C.; Jia, R. Non-Lipschitz Models for Image Restoration with Impulse Noise Removal. SIAM J. Imaging Sci. 2019, 12, 420–458. [Google Scholar] [CrossRef]
- Chen, X.; Niu, L.; Yuan, Y. Optimality conditions and a smoothing trust region newton method for non-Lipschitz optimization. SIAM J. Optim. 2013, 23, 1528–1552. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z. Iterative reweighted minimization methods for lp regularized unconstrained nonlinear programming. Math. Program. 2014, 147, 277–307. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, H. Smoothing projected Barzilai-Borwein method for constrained non-Lipschitz optimization. Comput. Optim. Appl. 2016, 65, 671–698. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, S.; Dai, Y.-H.; Zhang, S. A smoothing SQP framework for a class of composite lp minimization over polyhedron. Math. Program. 2016, 158, 467–500. [Google Scholar] [CrossRef]
- Guo, L.; Chen, X.J. Mathematical programs with complementarity constraints and a non-Lipschitz objective: Optimality and approximation. Math. Program. 2021, 185, 455–485. [Google Scholar] [CrossRef]
- Rockafellar, R.T.; Wets, R.J.-B. Variational Analysis; Springer: Berlin, Germany, 1998. [Google Scholar]
- Andreani, R.; Haeser, G.; Schuverdt, M.L.; Silva, P.J.S. A relaxed constant positive linear dependence constraint qualification and applications. Math. Program. 2012, 135, 255–273. [Google Scholar] [CrossRef]
- Hestenes, M.R. Optimization Theory: The Finite Dimensional Case; Wiley: New York, NY, USA, 1975. [Google Scholar]
- Scholtes, S. Convergence properties of a regularization scheme for mathematical programs with complementarity constraints. SIAM J. Optim. 2001, 11, 918–936. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).