Numerical Modelling of Vibration Responses of Helical Gears under Progressive Tooth Wear for Condition Monitoring




Abstract
:1. Introduction
2. Gear Tooth Wear Modelling
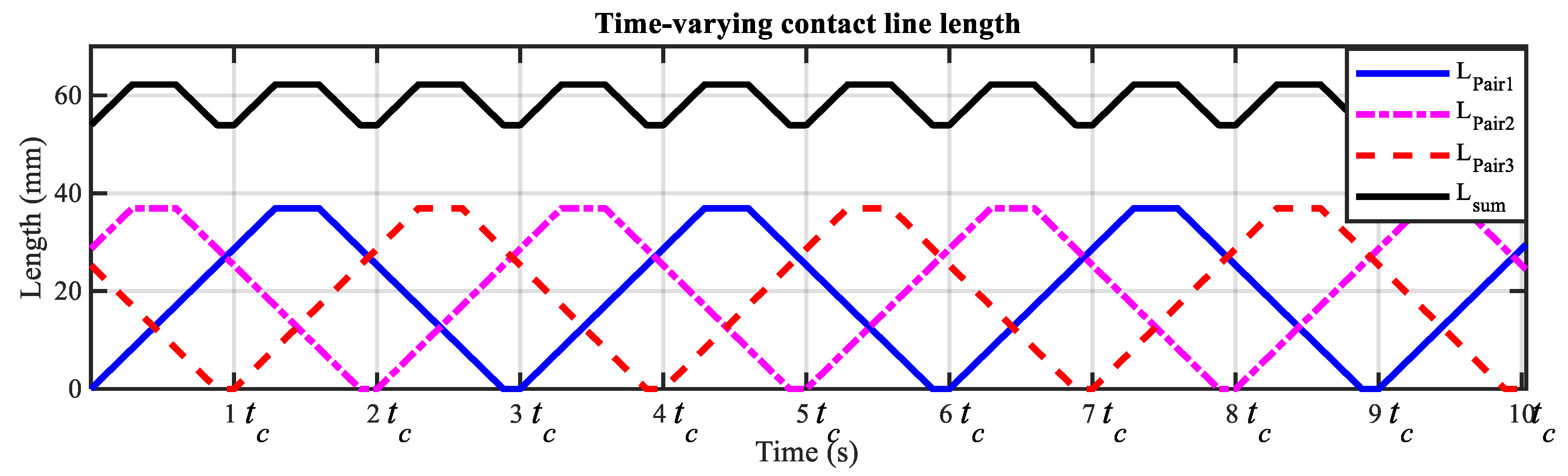
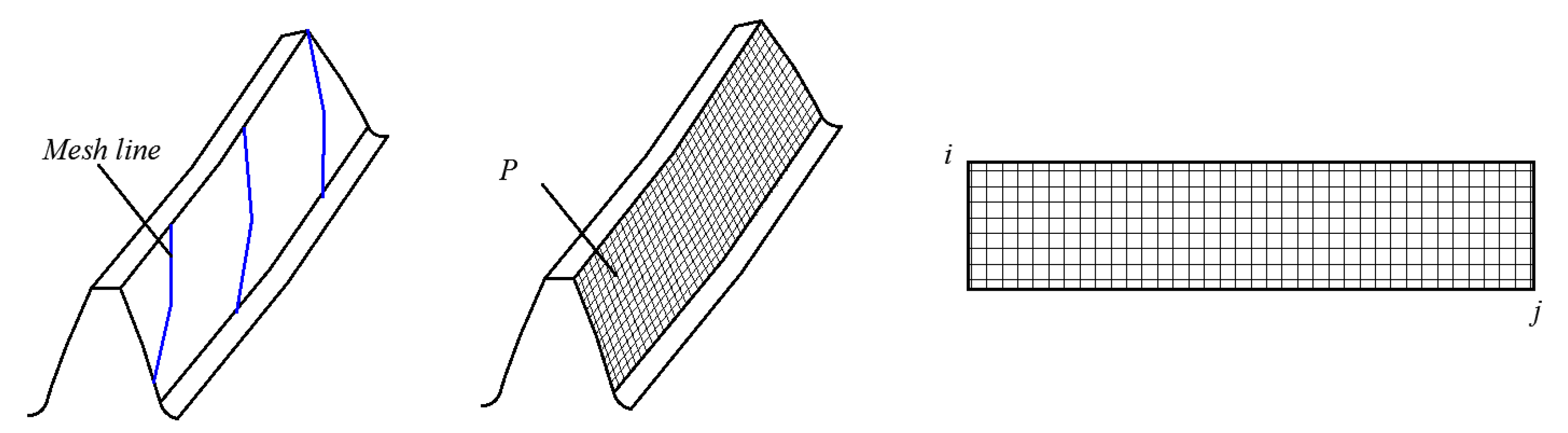
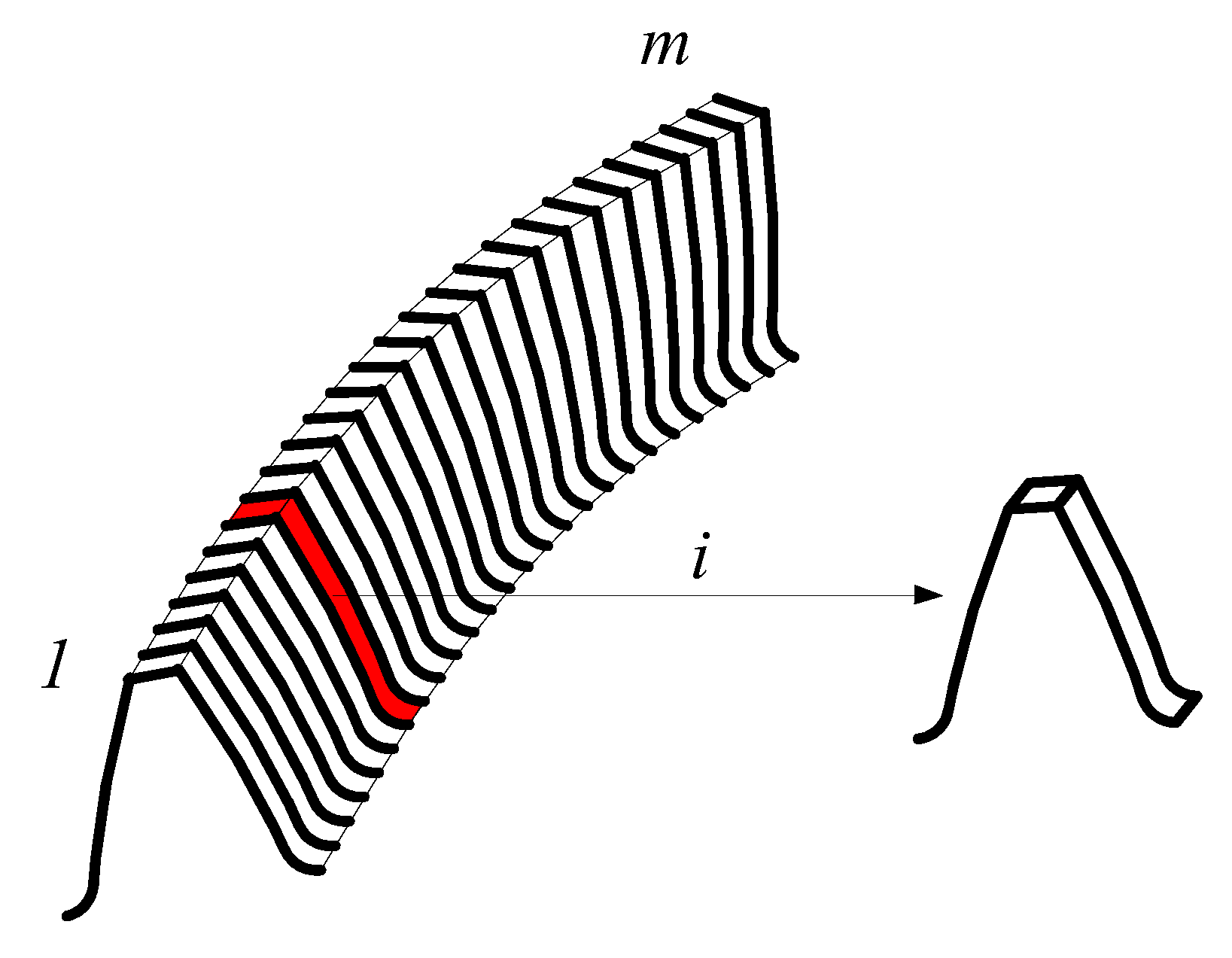
2.1. Mesh Characteristics of Helical Gear
2.2. Modelling of Gear Wear under Mixed EHL Regime
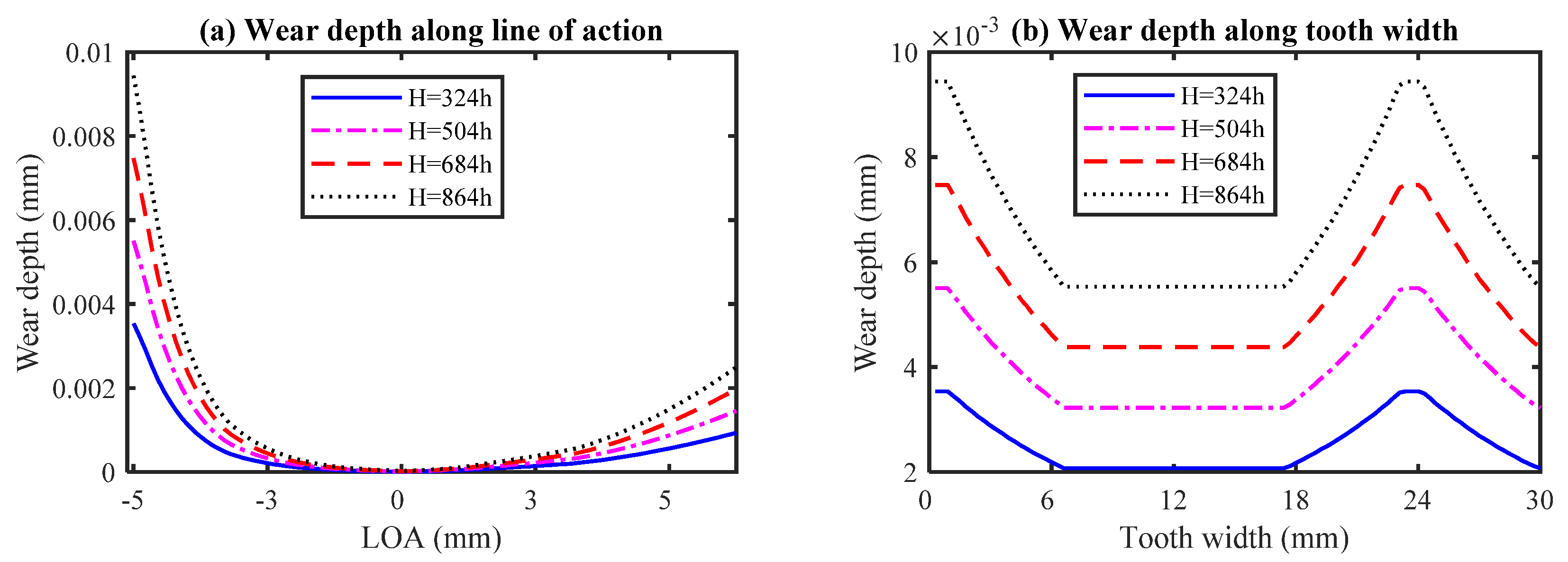
2.3. Wear Depth after Different Running Hours
3. Dynamic Modelling of Helical Gear
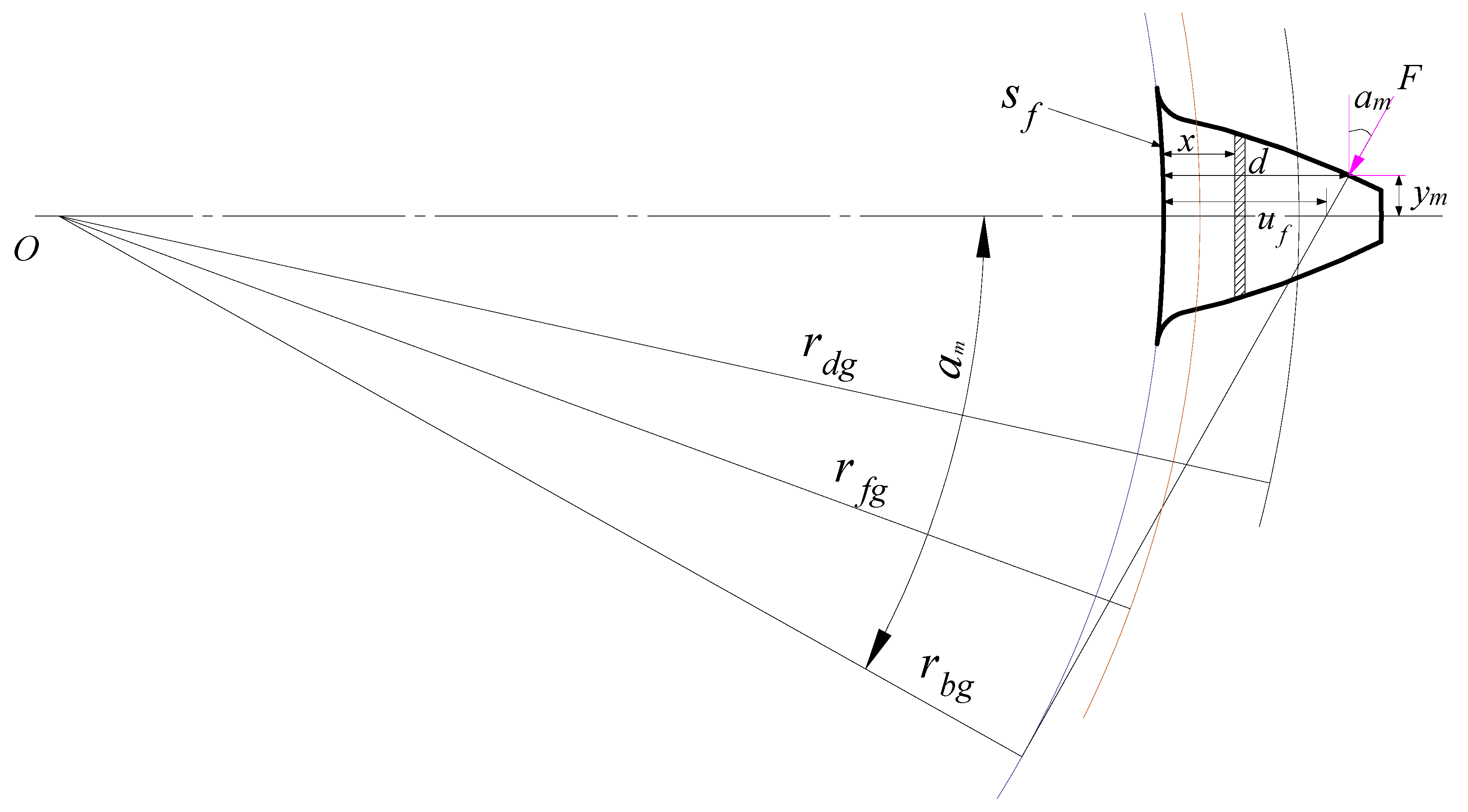
3.1. Potential Energy Method for TVMS Calculation
3.2. TVMS Calculation of Helical Gear with Tooth Wear
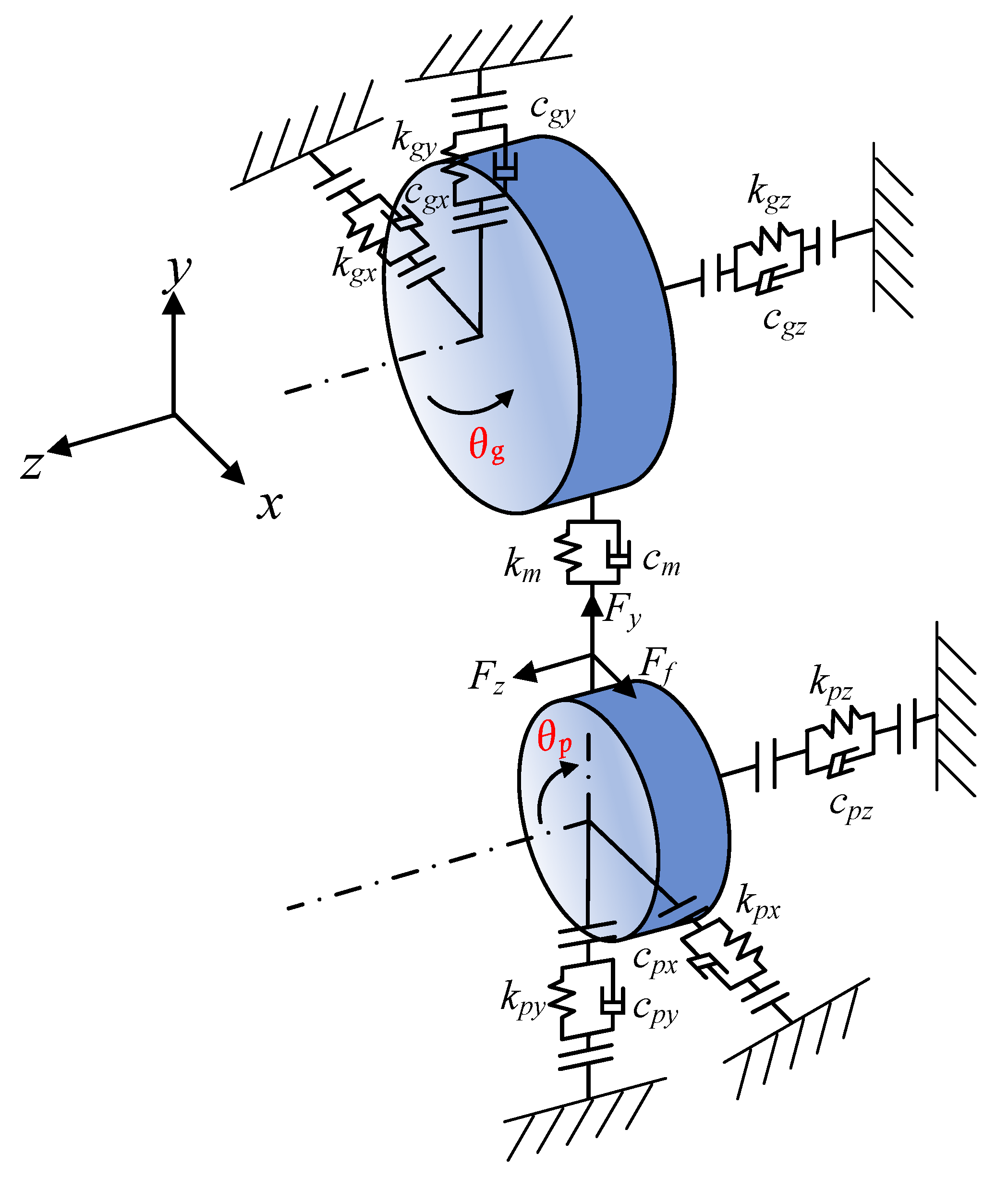
3.3. An Eight-Degree of Freedom Dynamic Model
4. Modelling Results and Experimental Study
4.1. Changes in Gear Meshing Stiffness and Meshing Force
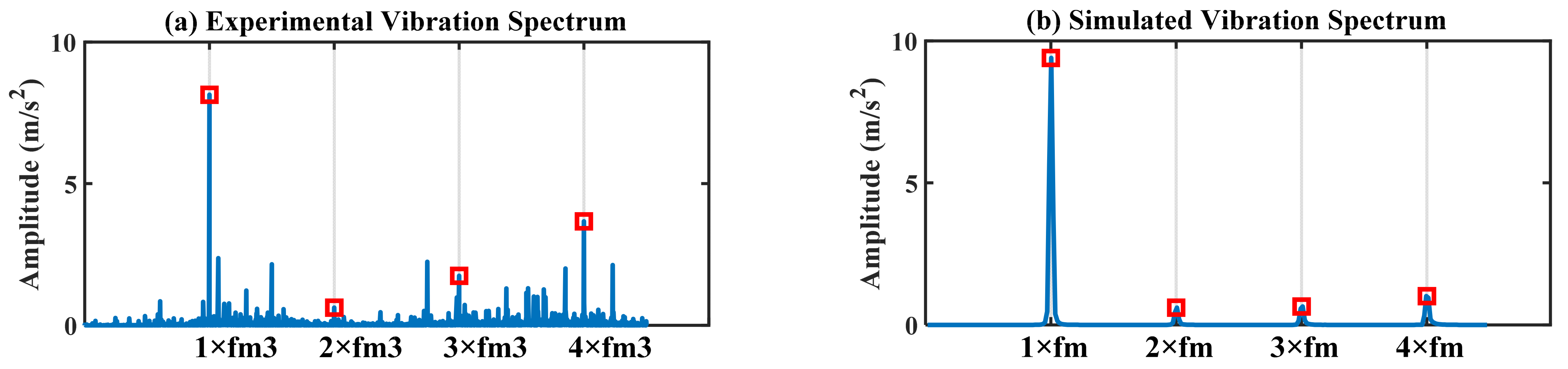
4.2. Raw Spectrum Comparison between Simulated Vibration and Experimental Vibration
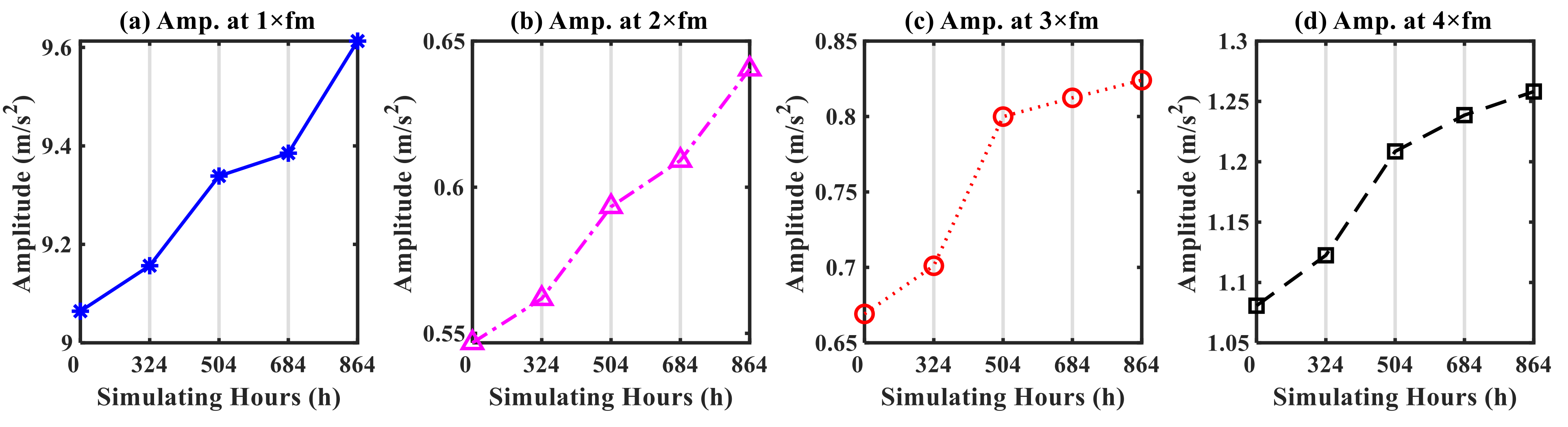
4.3. Simulation Results under Different Operating Hours
4.4. Experimental Results under Different Operating Hours
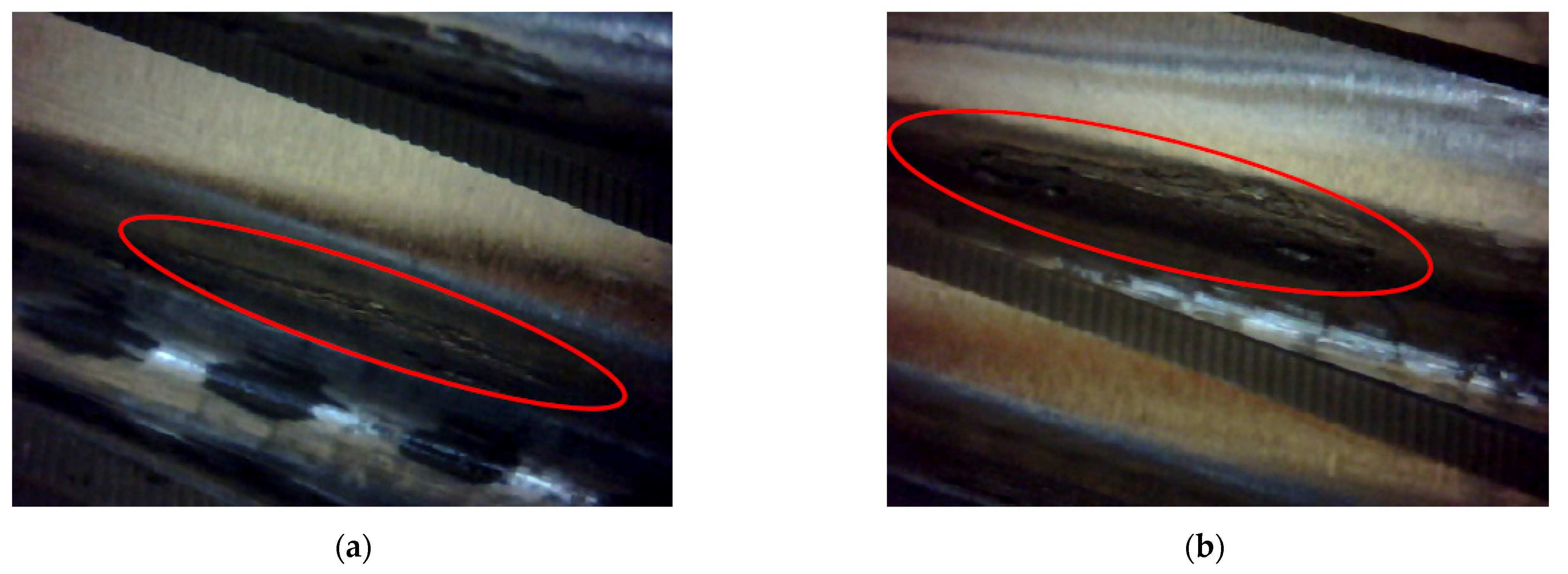
4.4.1. Description of Experimental Bench
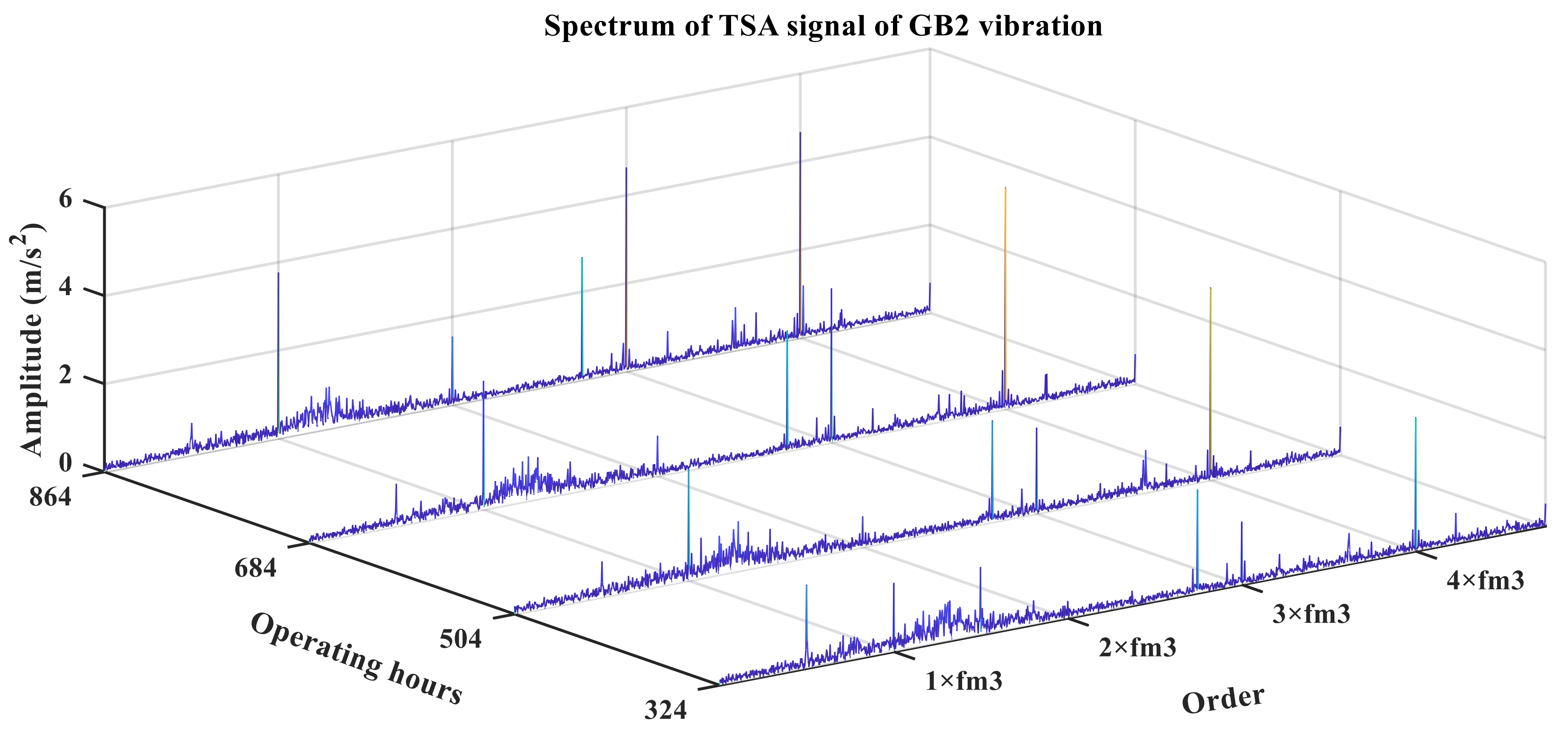
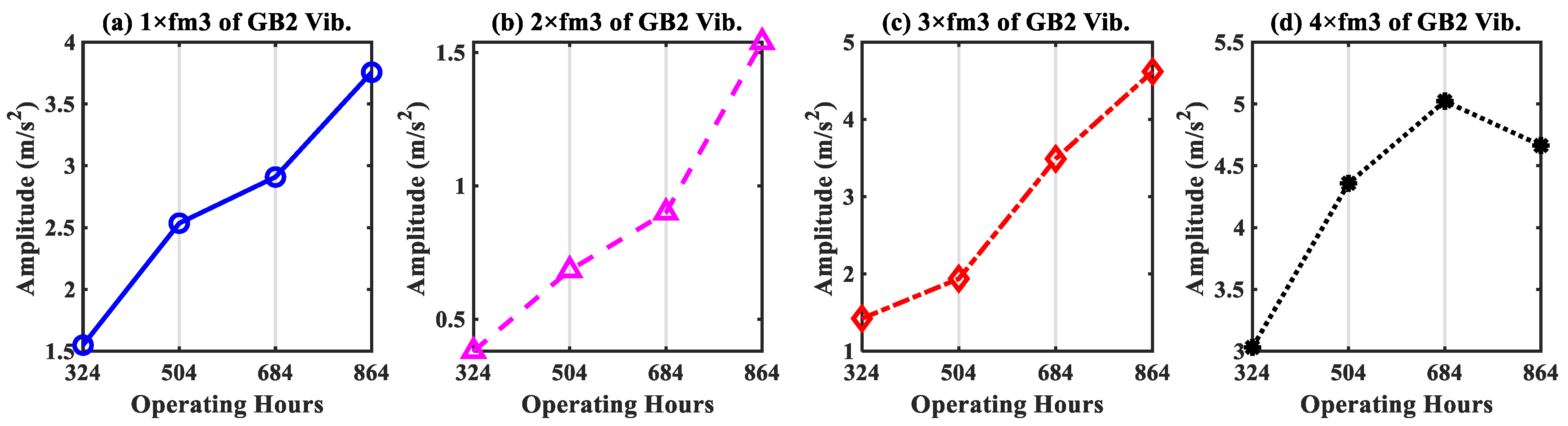
4.4.2. Feature Extracted from Experimental Vibration Spectrum
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Archard, J.F.; Hirst, W.; Allibone, T.E. The wear of metals under unlubricated conditions. Proc. R. Soc. Lond. Ser. A. Math. Phys. Sci. 1956, 236, 397–410. [Google Scholar] [CrossRef]
- Archard, J.F. Contact and Rubbing of Flat Surfaces. J. Appl. Phys. 1953, 24, 981–988. [Google Scholar] [CrossRef]
- Stanković, M.; Marinković, A.; Grbović, A.; Mišković, Ž.; Rosić, B.; Mitrović, R. Determination of Archard’s wear coefficient and wear simulation of sliding bearings. Ind. Lubr. Tribol. 2019, 71, 119–125. [Google Scholar] [CrossRef]
- Osman, T.; Velex, P. Static and dynamic simulations of mild abrasive wear in wide-faced solid spur and helical gears. Mech. Mach. Theory 2010, 45, 911–924. [Google Scholar] [CrossRef]
- Gu, Y.-K.; Li, W.-F.; Zhang, J.; Qiu, G.-Q. Effects of Wear, Backlash, and Bearing Clearance on Dynamic Characteristics of a Spur Gear System. IEEE Access 2019, 7, 117639–117651. [Google Scholar] [CrossRef]
- Kuang, J.H.; Lin, A.D. The Effect of Tooth Wear on the Vibration Spectrum of a Spur Gear Pair. J. Vib. Acoust. 2001, 123, 311. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Zhang, J. Investigation on coupling effects between surface wear and dynamics in a spur gear system. Tribol. Int. 2016, 101, 383–394. [Google Scholar] [CrossRef]
- Johnson, K.L.; Greenwood, J.A.; Poon, S.Y. A simple theory of asperity contact in elastohydro-dynamic lubrication. Wear 1972, 19, 91–108. [Google Scholar] [CrossRef]
- Masjedi, M.; Khonsari, M.M. Theoretical and experimental investigation of traction coefficient in line-contact EHL of rough surfaces. Tribol. Int. 2014, 70, 179–189. [Google Scholar] [CrossRef]
- Masjedi, M.; Khonsari, M.M. An engineering approach for rapid evaluation of traction coefficient and wear in mixed EHL. Tribol. Int. 2015, 92, 184–190. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, C.; Lei, Y.; Liu, Z. An adhesive wear model for helical gears in line-contact mixed elastohydrodynamic lubrication. Wear 2019, 426–427, 896–909. [Google Scholar] [CrossRef]
- Ding, H.; Kahraman, A. Interactions between nonlinear spur gear dynamics and surface wear. J. Sound Vib. 2007, 307, 662–679. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Feng, R.; Pang, X.; Wen, B. An improved analytical method for mesh stiffness calculation of spur gears with tip relief. Mech. Mach. Theory 2016, 98, 64–80. [Google Scholar] [CrossRef]
- Fu, C.; Xu, Y.; Yang, Y.; Lu, K.; Gu, F.; Ball, A. Response analysis of an accelerating unbalanced rotating system with both random and interval variables. J. Sound Vib. 2020, 466, 115047. [Google Scholar] [CrossRef]
- Hu, C.; Smith, W.A.; Randall, R.B.; Peng, Z. Development of a gear vibration indicator and its application in gear wear monitoring. Mech. Syst. Signal Process. 2016, 76–77, 319–336. [Google Scholar] [CrossRef]
- Brethee, K.F.; Zhen, D.; Gu, F.; Ball, A.D. Helical gear wear monitoring: Modelling and experimental validation. Mech. Mach. Theory 2017, 117, 210–229. [Google Scholar] [CrossRef]
- Loutas, T.H.; Roulias, D.; Pauly, E.; Kostopoulos, V. The combined use of vibration, acoustic emission and oil debris on-line monitoring towards a more effective condition monitoring of rotating machinery. Mech. Syst. Signal Process. 2011, 25, 1339–1352. [Google Scholar] [CrossRef]
- Zhang, R.; Gu, X.; Gu, F.; Wang, T.; Ball, A.D. Gear Wear Process Monitoring Using a Sideband Estimator Based on Modulation Signal Bispectrum. Appl. Sci. 2017, 7, 274. [Google Scholar] [CrossRef]
- Dowson, D.; Higginson, G.R. Elasto-Hydrodynamic Lubrication: International Series on Materials Science and Technology; Elsevier: Amsterdam, The Netherlands, 2014; ISBN 9781483181899. [Google Scholar]
- Brandão, J.A.; Meheux, M.; Ville, F.; Seabra, J.H.O.; Castro, J. Comparative overview of five gear oils in mixed and boundary film lubrication. Tribol. Int. 2012, 47, 50–61. [Google Scholar] [CrossRef]
- Masjedi, M.; Khonsari, M.M. On the prediction of steady-state wear rate in spur gears. Wear 2015, 342–343, 234–243. [Google Scholar] [CrossRef]
- Wan, Z.; Cao, H.; Zi, Y.; He, W.; Chen, Y. Mesh stiffness calculation using an accumulated integral potential energy method and dynamic analysis of helical gears. Mech. Mach. Theory 2015, 92, 447–463. [Google Scholar] [CrossRef]
- Chaari, F.; Fakhfakh, T.; Haddar, M. Analytical modelling of spur gear tooth crack and influence on gearmesh stiffness. Eur. J. Mech. A/Solids 2009, 28, 461–468. [Google Scholar] [CrossRef]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of Gear Body to Tooth Deflections—A New Bidimensional Analytical Formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Xu, H.; Kahraman, A.; Anderson, N.E.; Maddock, D.G. Prediction of Mechanical Efficiency of Parallel-Axis Gear Pairs. J. Mech. Des. 2007, 129, 58. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| hmin | Minimum film thickness, µm | Re | composite surface roughness, 1.1 × 10−6 m |
| αpv | Pressure-viscosity factor, 2.03 × 10−8 m2/N | η0 | Lubricant viscosity, 0.2883 Pa·s |
| ur | Rolling velocity, m/s | E | Elastic modulus, 200 GPa |
| ρ | Equivalent radius, m | E′ | |
| w | Load per unit length | ν | Poisson ratio, 0.28 |
| kc | Thermal conductivity, W/m·K | k | Wear coefficient, 1 × 10−16 m2/N |
| Gearbox | GB1 | GB2 | ||
|---|---|---|---|---|
| Stage 1 | Stage 2 | Stage 1 | Stage 2 | |
| Teeth number, Z | Zr1/Zr2 = 49/55 | Zr3/Zr4 = 13/59 | Zi1/Zi2 = 59/13 | Zi3/Zi4 = 47/58 |
| Helix angle, β (°) | 27 | 13 | 13 | 27 |
| Centre distance, a (mm) | 74 | 74 | 74 | 74 |
| Normal pressure angle, αn (°) | 20 | 20 | 20 | 20 |
| Transverse pressure angle (°) | 22.22 | 20.48 | 20.48 | 22.22 |
| Gear tooth width, b (mm) | 25 | 36 | 36 | 25 |
| Normal Module, mn (mm) | 1.25 | 2 | 2 | 1.25 |
| Transverse contact ratio, εt | 1.6514 | 1.5927 | 1.5927 | 1.6518 |
| Overlap ratio, εo | 2.8902 | 1.2889 | 1.2889 | 2.8902 |
| Young’s modulus, E (GPa) | 200 | 200 | 200 | 200 |
| Poisson ratio, ν | 0.28 | 0.28 | 0.28 | 0.28 |
| Surface roughness, σ (µm) | 0.8 | 0.8 | 0.8 | 0.8 |
| Vickers hardness, Hd (Pa) | 6.865 × 109 | 6.865 × 109 | 6.865 × 109 | 6.865 × 109 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Wang, T.; Zhang, R.; Gu, F.; Ball, A.D. Numerical Modelling of Vibration Responses of Helical Gears under Progressive Tooth Wear for Condition Monitoring. Mathematics 2021, 9, 213. https://doi.org/10.3390/math9030213
Sun X, Wang T, Zhang R, Gu F, Ball AD. Numerical Modelling of Vibration Responses of Helical Gears under Progressive Tooth Wear for Condition Monitoring. Mathematics. 2021; 9(3):213. https://doi.org/10.3390/math9030213
Chicago/Turabian StyleSun, Xiuquan, Tie Wang, Ruiliang Zhang, Fengshou Gu, and Andrew D. Ball. 2021. "Numerical Modelling of Vibration Responses of Helical Gears under Progressive Tooth Wear for Condition Monitoring" Mathematics 9, no. 3: 213. https://doi.org/10.3390/math9030213
APA StyleSun, X., Wang, T., Zhang, R., Gu, F., & Ball, A. D. (2021). Numerical Modelling of Vibration Responses of Helical Gears under Progressive Tooth Wear for Condition Monitoring. Mathematics, 9(3), 213. https://doi.org/10.3390/math9030213