Abstract
This paper considers the robust stabilization problem for interval plants with parametric uncertainty and uncertain time-delay based on the value set characterization of closed-loop control systems and the zero exclusion principle. Using Kharitonov’s polynomials, it is possible to establish a sufficient condition to guarantee the robust stability property. This condition allows us to solve the control synthesis problem using conditions similar to those established in the loopshaping technique and to parameterize the controllers using stable polynomials constructed from classical orthogonal polynomials.
1. Introduction
Time-delay systems are systems in which a time lag occurs between the input of the system and its consequent output; such systems may be electronic, mechanical, biological, manufacturing process, or chemical systems, among many others. In fact, it can be argued that time delays are related to all real-life systems [1]. This is one of the reasons why time-delay systems have spurred great interest among the scientific community [2]. The use of mathematical representations of physical systems to mathematically describe interactions among system components allows us to analyze critical stability properties that ensure good performance of the dynamic system as well as to prevent its physical destruction. However, the use of these mathematical models introduces some errors into the stability analysis because mathematical representations of physical processes do not always characterize dynamic behavior successfully. Thus, this problem has been addressed by including dynamic uncertainty [3] or parametric uncertainty [4,5] in the mathematical model; in that manner, we refer to robust stability when uncertainty is considered in the mathematical model. Robust control is a very active field where important developments, such as stabilization design, control, passive and dissipative control, filtering, Kalman filtering, and stochastic control, have been obtained in studies of stability [6]. We discuss this property in the present paper with a special emphasis on systems with parametric uncertainty. The main methods used to examine the stability of this type of system are as follows: (a) Time-domain methods: time-domain methods are based primarily on two famous theorems, the Lyapunov–Krasovskii stability theorem and the Razumikhin theorem. The main idea in these methods is to obtain sufficient conditions to verify stability of time-delay linear systems by constructing an appropriate Lyapunov–Krasovskii functional or an appropriate Lyapunov function [7]. Although this is a very important theoretical idea, it was not until the 1990s that it could be implemented when Ricatti equations, linear matrix inequalities (LMIs), and Matlab toolboxes appeared and facilitated the construction of Lyapunov–Krasovskii functionals (LKF) and Lyapunov functions. Since then, significant results have appeared one after another. For example, the authors of [8] applied Lyapunov and LMI techniques to verify the robust stability property of time-delay systems, the authors of [9] presented a novel method to parameterize LKF where the parameters are polynomial functions, and the authors of [10] derived a new stability criterion for a time-delayed linear system via modified LKF application. (b) Frequency-domain methods: techniques derived from this methodology are used to determine a system’s stability based either on inspection of the roots’ distribution of a characteristic equation or on the solution of a complex Lyapunov matrix function. Some important results to verify the robust stability property using frequency-domain methods were developed in [11,12]. In addition, it is important to consider that, when time-delays are treated in a system, this involves transcendental terms in the characteristic equation, thus modifying the analysis of a polynomial (free-time-delay systems) to a quasi-polynomial (TDS). This fact entails the analysis of an infinite number of roots [13]. In this regard, new results that verify the robust stability of TDS have been presented in recent years, e.g., by [14,15]. (c) Design: from a practical point of view, the stabilization problem is the most important in the design phase because getting the desired performance depends on it. This problem has been addressed with great interest by many researchers. For instance, the authors of [16] designed a feedback law to assign a finite number of poles of a dynamic differential-difference system; meanwhile, the authors of [17] presented conditions for a static state-feedback-type control law to stabilize a system represented by a time-delay differential equation with variant disturbance and considering saturation in the control law. Another design method is thte one presented by the authors of [18]. They proposed a distributed delay control law that assigns a finite closed-loop spectrum in which the robustness property is obtained through dynamic feedback by including a low-pass filter in the control loop. Now, if we center our attention on the robust stabilization of interval plants, we find that one of the first paper related to this topic was [19]. The authors presented the conditions needed to stabilize interval plants using first-order controllers; however, time-delay systems were not considered. Later, in [20], conditions to stabilize systems with linear affine uncertainty by using the convex direction method were presented. Moreover, similar methods considering fractional-order interval plants and fractional-order controllers were presented in [21,22]. Other results were presented In [23], where a necessary condition and a sufficient condition for verifying the robust stability of interval plants were used to design robust controllers, and this approach was applied to a chemical process plant with a time delay. A more recent result was presented in [24], where the authors showed a method to describe regions of the parameters of a PI controller that guaranteed robust performance of the closed-loop control system; this technique was applied to a continuously stirred tank reactor.
Considering the results from the previous discussion, it is clear that most of them addressed the time-domain approach of time-delay systems, making it necessary to analyze and design them using the Lyapunov technique. It is worth drawing attention to the fact that the uncertainty therein should be expressed by time functions. Nevertheless, it is well known that, in practice, there exist many applications in which uncertain parameters depend on magnitudes different from time, such as temperature. Good examples of this are resistors, capacitors, and inductors in electrical circuits. This is where the frequency domain offers a useful alternative to analyze such systems while enabling us to obtain less conservative results.
This work presents a robust stabilization approach based on the frequency domain for interval plants with parametric uncertainty and uncertain time-delay. This result is based on the verification of selected polynomial properties using Kharitonov’s polynomials in a way that allows us to establish sufficient conditions to guarantee robust stability. This condition is essential for determining the controller that stabilizes the interval plant with a time delay by applying conditions similar to those established in the loop-shaping technique and by parameterizing controllers using stable polynomials constructed from classical orthogonal polynomials.
Finally, the manuscript is organized as follows. The preliminary results and the problem statement are presented in Section 2. Section 3 presents the main result of this paper as well as two illustrative examples. The conclusions and future works are presented in Section 4 and Section 5, respectively.
2. Preliminaries and Problem Statement
In this work, a polynomial is called an uncertain polynomial if their coefficients depend on the entries of a vector of uncertain values , say . Moreover, is said to have an independent uncertainty structure if each component of enters only one coefficient. Consequently, a family of polynomials is said to be an interval polynomial family of degree at most n if has an independent uncertainty structure; if each coefficient depends continuously on ; and for , there are such that or, equivalently, . Since the coefficients of every element of are uncertain quantities that belong to a closed interval, we denote the interval polynomial family as
following [5].
In this context, let be an interval polynomial family of degree such that and with . A transfer function satisfying
where is as in (1) and , is said to be a strictly proper interval plant with invariant degree d. It is well-known that an interval plant represents an infinite number of transfer functions; in this sense, (2) is said to be robustly stable if is a stable polynomial for every value of (see, for instance, [5]). However, the stability property of an interval plant is simplified to verify the stability property of four polynomials associated with . Indeed, (2) is a robustly stable plant if and only if
and
are stable polynomials. The previous criteria is known as the Kharitonov theorem and is said to be the set of Kharitonov polynomials associated with (see [11]).
2.1. Time-Delay Systems
For systems involving time delays, let us consider the closed-loop system shown in Figure 1. A time-delay system is an interval plant with uncertain time delay such that
where and are the representations of the input and output signal, respectively, and is defined by (2). It is well-known that the robust asymptotic stability property of the system shown in Figure 1 is guaranteed if and only if, for every , , , and , the quasi-polynomial
satisfies , i.e, is a stable quasi-polynomial, where is the set of complex numbers that have a real part greater than or equal to zero.
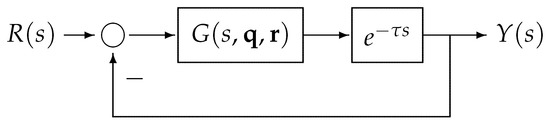
Figure 1.
Closed-loop system for the interval plant with a time delay.
2.2. The Value Set
A geometric criterion to determine whether a given time-delay system is robustly stable in terms of a two-dimensional subset of the complex plane is the so-called value set. Given , the value set associated with at frequency is defined by
The main importance of the Kharitonov theorem is that it allows us to know the geometric shape of the value set. To illustrate this, let us denote by the value set associated with at frequency . It is well-known that both and are rectangles with vertices that are obtained by evaluating the Kharitonov polynomials associated with and , respectively, at . In fact, if denotes the set of Kharitonov polynomials associated with , then
and
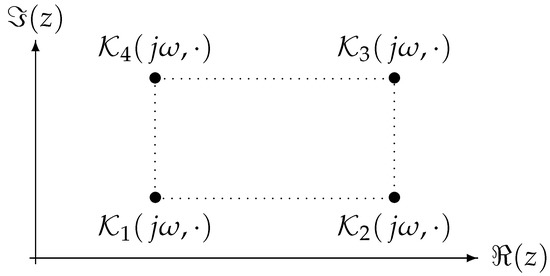
Figure 2.
Value set associated with an interval polynomial family.
Considering the configuration of Figure 1, we deal with the geometric shape of the value set associated with (3) when is fixed. The following proposition provides some of its properties that are used in this work.
Proposition 1.
Given and , let denote the value set associated with (3) at frequency ω. The following statements hold [26]:
- Set as the corresponding value set associated with . is determined by the rotation radians clockwise about the origin of :Therefore, .
- Let be a nonnegative integer such that . If is not a multiple of , then is a polygon (parallelogram, hexagon, or octagon) with vertices inwhere, for , and , withOtherwise, is a rectangle with vertices in , . Here, the integer-valued function is defined as the remainder of m divided by 4.
- The geometric centers of , , and areandrespectively. Furthermore, the orbit of is an arc of a circle centered at with a radius equal to when τ increases, where stands for the modulus of the complex number z.
The above proposition becomes interesting if we realize that the robust stability problem has been turned into a geometric problem where we only need to verify if the origin is excluded from its corresponding value set. If we assume that has at least one stable member for any , then a necessary and sufficient condition for the closed-loop system shown in Figure 1 to be robustly stable is that for all . This fact is called the zero exclusion principle, and the best reference here is [5].
2.3. Orthogonal Polynomials on the Real Line
Let be a positive weight function supported on some interval . We say that a sequence of monic polynomials with real coefficients is the sequence of monic orthogonal polynomials associated with if it satisfies the orthogonality condition:
where is the Kronecker’s delta. A basic reference here is [27]. It is well-known that the zeros of , say , belong to the interior of the convex hull of I. Furthermore, the polynomials defined by
are called second kind polynomials associated with . Notice that has a degree of . Moreover, it is very well-known that
where the positive numbers are known as Christoffel numbers and are given by (see [28,29])
For more details on this topic, see [27,30,31,32].
In order to get our results, we consider sequences of orthogonal polynomials associated with a perturbation of two classical weights. In particular, Laguerre and Jacobi polynomials will be used to construct families of compensators. Hence, the remainder of this subsection will be devoted to provide some structural properties of these modified classical weights that were proved in [33].
Proposition 2.
Let and denote the sequences of Laguerre and Jacobi monic polynomials orthogonal with respect to and , respectively. Let and denote the sequences of second kind polynomials associated with and , respectively. Then, for and , we have for
and
where
where denotes the Pochhammer’s symbol and , , is the well-known Gamma function (see [34]).
Notice that the particular case corresponds to the classical Laguerre and (shifted) Jacobi weights, respectively (see [27]). In addition, the corresponding sequences of orthogonal polynomials depend on and t and, thus, they can be seen as parameters. Moreover, both the Laguerre and Jacobi polynomials have positive real zeros, and thus, and are stable polynomials for all admissible values of , and t. On the other hand, an important result for this work is the following proposition proved in [33], where the authors established the convergence of two rational functions associated with these sequences of orthogonal polynomials. The restrictions on t, , and are due to integrability and positivity considerations.
Proposition 3.
For every ,
- if with , then and
- if with and , then .
3. Results
In this section, we consider the value set associated with the quasi-polynomial family defined in (3) at frequency . The idea is to describe the orbits of the points on that are farthest from its geometric center when is increased. Since, for all , is a polygon, we focus our attention on the curves describing the motion of its vertices in terms of the vertices of and .
For this purpose, the following assumptions is used in the remainder of this section. For all , there is no loss of generality in assuming and , and hence, both and belong to the first quadrant in the complex plane. Geometrically speaking, this requirement implies that is the farthest vertex of from the origin. Here and subsequently, for and , stands for the open disc centered in z with radius and its boundary is the circle defined by . We write for the closure of , which satisfies . In addition, the function argument of z with a principal value in the range is denoted by . With the notation , we have
Lemma 1.
For every ,
- the orbits of each vertex of correspond to circular arcs centred on the vertices of with a radius equal to the modulus of every vertex of when τ increases, and
- for all , where .
Proof.
Let . In order to show the first assertion, proposition 1 makes it obvious that, for , and are the orbits of and , respectively, when . For the second, set . Notice that
contains the edges of (see [35]), and thus, the edges of can be parameterized as
Therefore, it is easy to check that the union of
and
contains the edges of . If , say
for any and , then
However, since is a rectangle with a geometric center at . Since is the farthest vertex of from the origin, we get
As before, if , say
for any and , then
and the proof is complete. □
On the other hand, as and are the nearest and farthest vertices of from the origin, respectively, Lemma 1 implies that the vertices of that are farthest from are and , where and are chosen such that and , respectively. This clearly forces
with being a nonnegative integer such that . Thus, the orbits of the points on that contain the points on that are farthest from when increases are , . Summarizing, we have
Lemma 2.
For all , the minimal closed disc containing when τ increases is
- if , where and , and
- if .
Proof.
It is easily seen that . Consequently, is the minimal closed disc containing . Our next concern is when . We first prove that is the minimal closed disc containing . To do this, set for any . It follows immediately that
From (4), it is obvious that , and as required. Hence,
It remains to show that is minimal. Notice that the proof falls naturally into two parts. Fix , and let us assume for the moment that and , with . We consider the line through the points and defined as follows:
where . Since , the tangent function is well defined. Taking , we have
This gives , and thus,
Moreover, it is evident that . Therefore,
Now, , which is due to the fact that , and are collinear. Since the orbits of the points on that are farthest from its center when increases are , , we conclude that and intersect at four distinct points and, finally, that is the minimal closed disc containing .
The same reasoning applies to the case , with ℘ replaced by the vertical line . We leave it to the reader to verify that and intersect at two distinct points. □
We can now formulate our main result.
Theorem 1.
Consider the feedback structure shown in Figure 1. Suppose that is an interval plant with uncertain time delay and has an invariant degree such that , with being as in (2). If , then for all , the value set associated with at frequency ω is contained in . Furthermore, if has at least one stable member for any τ and if for every , then the overall transfer function in Figure 1 is robustly stable for every .
Proof.
The first assertion is a consequence of Lemma 2. For the second, it is known that is the characteristic polynomial of the closed-loop system shown in Figure 1. Since for each , Lemma 2 shows that for each . It remains to be proven that . An easy computation shows that and , where the diameter of the latter is the length of the interval . Now, , which is due to the fact that belongs to the first quadrant in the complex plane or, equivalently, , and as required. □
We are thus led to the following strengthening of Theorem 1:
Corollary 1.
Assume that is stable and that has at least one stable member for any . If for all , then is robustly stable for .
3.1. Robust Stabilization of Interval Plants with a Time Delay
To stabilize the interval plant family with uncertain time delay , let us consider the transfer functions of a proper compensator of the form
such that the degree of the numerator polynomial does not exceed the degree of the denominator polynomial. is said to be a robust stabilizer in closed-loop of if, for every , , and ,
is a stable quasi-polynomial. Moreover, the overall transfer function of the configuration shown in Figure 3 is

Figure 3.
Closed-loop system for the interval plant with a time delay.
The criteria for a reasonable choice of when is robustly stable is established by our next theorem.
Theorem 2.
Proof.
Given , , , and , we have that and . Consequently,
Since , . Hence,
which is our assertion. Notice that the proof strongly depends on the assumption that is robustly stable because this fact implies . □
3.2. Compensators Associated with Modified Classical Weights
In this section, we use the results about the orthogonal polynomials presented in Section 2.3 to construct families of compensators satisfying the condition (10). Let and . According to (5), we have
Now, if , then , for and . Hence,
Therefore, since both and are positive numbers for any and any , we get for any fixed
For a large class of weight functions, including so-called classical weights, the limit on the right-hand side of the previous inequality exists (see Proposition 3). In order to design using orthogonal polynomials associated with (or ) when satisfies the hypotheses of Theorem 2, we propose the following methodology. Notice that the explicit expressions for both families of polynomials as well as the limit value of (11) in terms of the parameters (or ), can be found in Propositions 2 and 3, respectively.
The importance of Algorithm 1 is that m (the compensator’s degree) can be selected arbitrarily. Furthermore, the performance of the closed-loop system shown in Figure 3 is guaranteed by adjusting the values for , , and t, as we can see in the next section. Notice that the selection of each element of is independent of the choice of the others. Also, notice that all the involved objects can be computed explicitly by using the formulas from Propositions 2 and 3 so there is no computational complexity involved in implementation of the algorithm.
| Algorithm 1: Algorithm to select using modified classical orthogonal polynomials. |
| Input: Any strictly proper interval plant satisfying the hypotheses of Theorem 2 and any positive integer m. Output: A strictly proper compensator with degree m such that the feedback structure shown in Figure 3 is robustly stable for all . Find such that for every ; find such that for every ; in the Laguerre case, select such that , where . In the Jacobi case, select , and such that , where ; compute and by using (6) and (7) (or (8) and (9)), respectively, with the selected values of and t (or , , and t); do . |
3.3. Simulation Results
In this section, we apply Algorithm 1 developed in this work to two different examples considered in previous contributions. Therefore, we can set our goals as follows:
- Find the reference value associated with the given plant, and propose a or a according to step 3 of Algorithm 1.
- Apply the designed controller to the examples, and validate the methodology through simulations.
Example 1.
Consider the plant defined by a nominal transfer function with uncertain time delay presented in [36]:
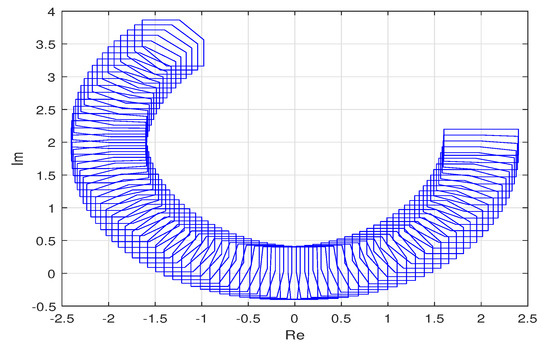
The plant is subject to parameter variations as follows: , , , , and . The value set in Figure 4 shows that the interval plant becomes unstable in the presence of a time delay for certain values of ω. According to steps 1 and 2 of Algorithm 1, by using (10), we find . Following steps 3 and 4, the stabilizing controller in the Laguerre case is computed taking and :
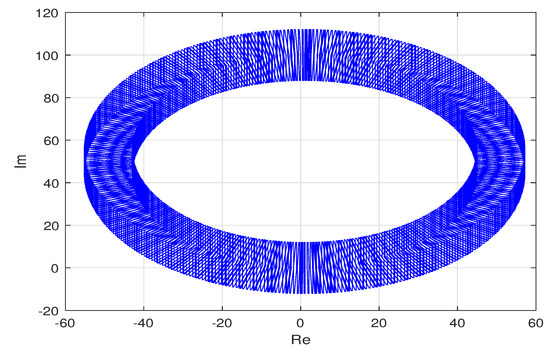
Figure 4.
Value set of the interval plant defined in Example 1 when and .
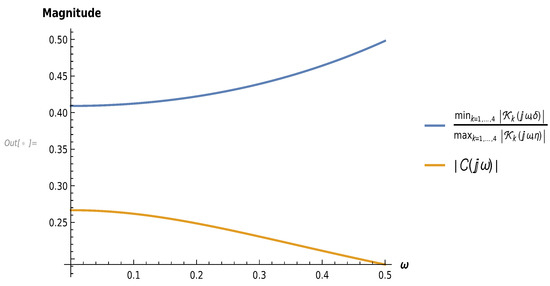
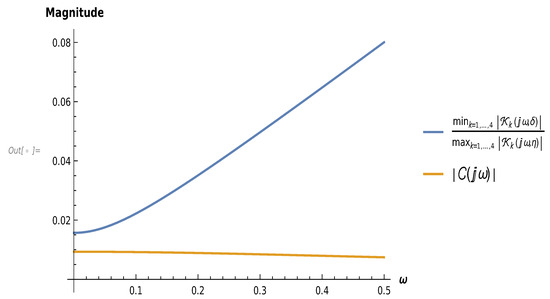
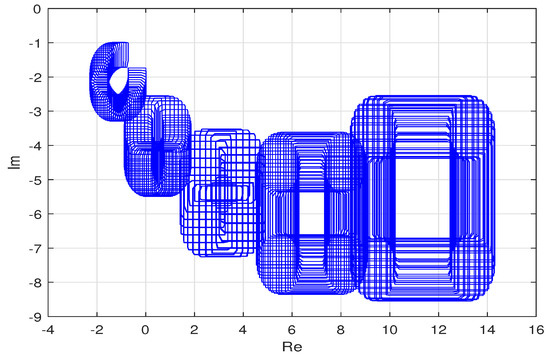
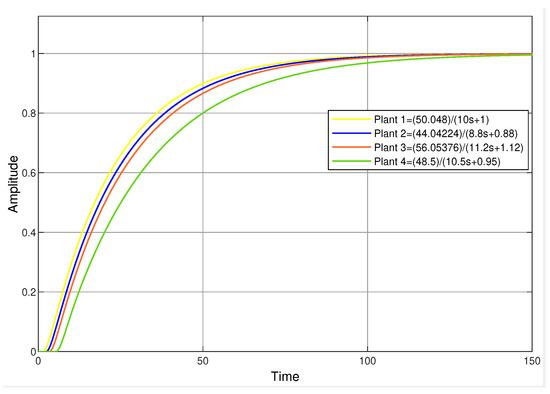
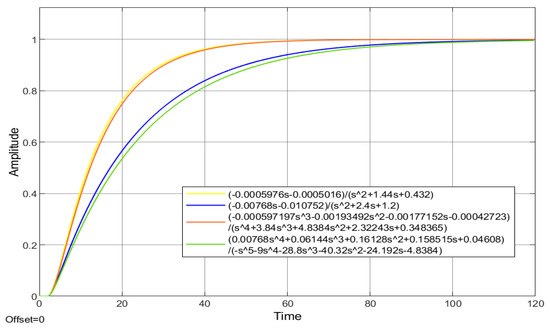
A graph showing inequality of the quotients of the plant and the controller as in (10) for different values of ω is shown in Figure 5; since (10) is satisfied, the closed-loop system given in Figure 3 is stable for (see Figure 6). Proceeding in a similar way, Figure 7 includes a simulation in the time domain where the proposed controller stabilizes 4 different fixed plants with parameters taken from the closed intervals, considering time delay. In addition, Figure 8 illustrates the responses from different compensators. The curve in yellow corresponds to the cases when , , and , while the rest correspond to the cases when and with (blue line), (red line), and (green line). As we can see, the controllers with low values of t and m reach the reference value faster than those having greater values of m and t.
Figure 5.
Graph of and .
Figure 6.
Value set of the stabilized interval plant defined in Example 1 when and .
Figure 7.
Simulated response of four fixed plants with a time delay using the same compensator.
Figure 8.
Simulated response under a desired reference step using different controllers.
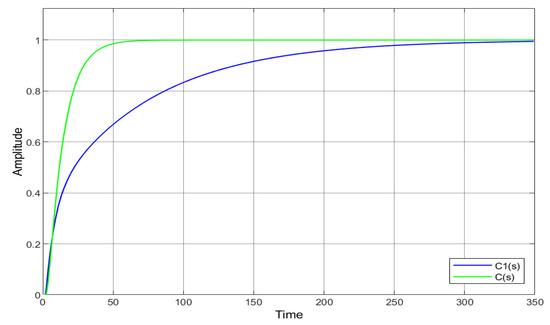
On the other hand, a comparison with the controllers presented in [36] is given in Figure 9. The performance of the controlled system improves when we use our proposal of with (green line) in the feedback structure shown in Figure 3. Notice that the closed-loop response lies between (blue line) and (red line), both recommended in [36].
Figure 9.
Simulated response under a desired reference step using two different controllers in the closed-loop system shown in Figure 3.
Example 2.
We now consider the model given in [37] for the hot-dip galvanising system:
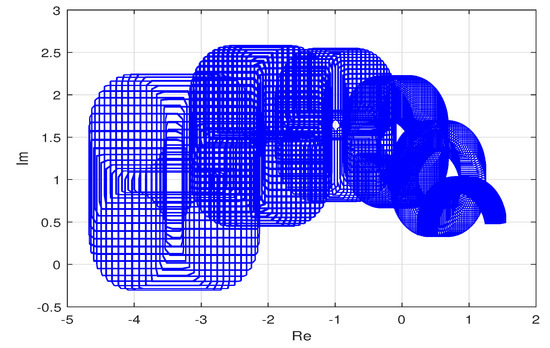
The plant is subject to parameter variations of 12 percent: , , , and . The corresponding value set in Figure 10 shows that the interval plant becomes unstable for certain values of ω in the presence of time delay. According to steps 1 and 2 in Algorithm 1, by using (10), we found . Following steps 3 and 4, the stabilizing controller in the Laguerre case can be defined by choosing :
Figure 10.
Value set of the interval plant defined in Example 2 when and .
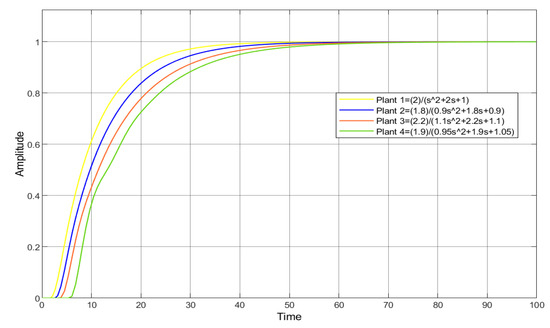
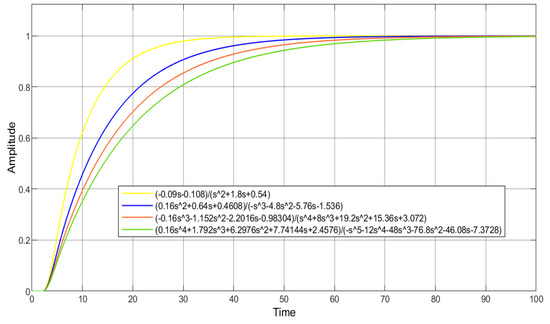
The inequality of the quotients of the plant and the controller is shown in Figure 11, the stability for is shown in Figure 12, while Figure 13 shows a simulation in the time domain, where the proposed controller stabilizes four different fixed plants with parameters taken from the closed intervals. A time delay is also considered. In addition, Figure 14 illustrates the responses from different compensators applied to a plant with a time delay. The curves in yellow and red correspond to the cases and , respectively, both cases with and . The rest correspond to the cases when and with (blue line) and (green line). Once again, the controllers with low values of t and m reach the reference value faster than those that have greater values of m and t.
Figure 11.
Graph of and .
Figure 12.
Value set of the stabilized interval plant defined in Example 2 when and .
Figure 13.
Simulated response of four fixed plants with time-delay using the same compensator.
Figure 14.
Simulated response under a desired reference step using different controllers.
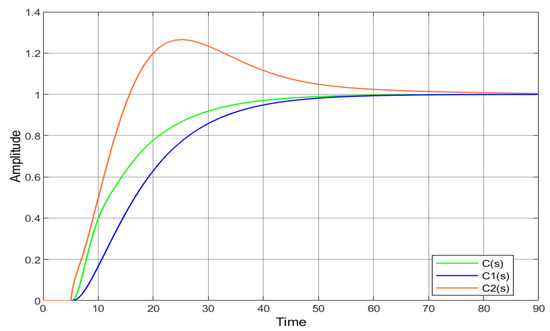
On the other hand, a comparison with the controller presented in [37] is shown in Figure 15. Notice that the performance of the controlled system improves when we use our proposed controller (green line) in the configuration given in Figure 3. The curve in blue corresponds to the closed-loop response when is taken as compensator, as it is suggested in [37].
Figure 15.
Simulated response under a desired reference step using two different controllers in the closed-loop system shown in Figure 3.
4. Conclusions
In this work, some geometrical properties about the value set associated with strictly proper interval plants with uncertain time delays and invariant degrees, such as the geometric shape of the orbits of its vertices and the minimal closed disc that contains it (Lemmas 1 and 2, respectively), were obtained. Consequently, a sufficient condition for robust stabilization of this type of interval plant was deduced (Theorem 1).
In addition, criteria that allow us to make a reasonable choice of a family of robust stabilizing compensators for some classes of interval plants with uncertain time delays are proposed (Theorem 2). Furthermore, we used modifications of well-known families of classical orthogonal polynomials in terms of a set of parameters (depending on the chosen family) to select two families of robust stabilizing compensators (Algorithm 1). The latter, together with a geometric approach to characterization of the value set, constitute the main novelty of this contribution.
5. New Directions
Finally, the approach used in this work can be extended in the following directions.
- The compensator considered in Theorem 2 can be designed in many different ways. For example, by applying pole-placement techniques, we can obtain a feedback configuration with a specified characteristic polynomial (see [38,39]).
- The families of compensators considered in Algorithm 1 are constructed using some classical weights, given by Proposition 2. In order to obtain other families of compensators, we propose introducing some perturbations on the coefficients of the recurrence relation that orthogonal polynomials satisfy (see, for instance, [40]).
- In addition, it is possible to consider, in our problem, another type of parametric uncertainty structure such as affine linear, multilinear, and polynomic uncertainties (see [5]).
Author Contributions
Conceptualization, G.R. and L.E.G.; methodology, P.Z., A.A., N.M., G.R., and L.E.G.; software, P.Z., A.A., N.M., G.R., and L.E.G.; validation, P.Z., A.A., and N.M.; formal analysis, P.Z., A.A., N.M., G.R. and L.E.G.; investigation, P.Z., A.A., N.M., G.R., and L.E.G.; resources, G.R.; writing—original draft preparation, P.Z., A.A., N.M., G.R., and L.E.G.; writing—review and editing, P.Z., A.A., N.M., G.R., and L.E.G.; visualization, P.Z., A.A., N.M., G.R., and L.E.G.; supervision, G.R. and L.E.G.; project administration, G.R. and L.E.G.; funding acquisition, G.R. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Universidad Autónoma de Tamaulipas under grants PROINN OVA-2018-250105, PROINNOVA-2018-250586, PROINNOVA-2018-250540, PROINNOVA-2018-250113, PROINNOVA-2018-250117, PROINNOVA-2018-250160, and PROINNOVA-2018-250255 and by Conacyt. The work of the last author was supported by Conacyt’s grant 287523.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors thank the valuable comments and suggestions made by the anonymous referees. They contributed to improve the contents and presentation of this manuscript
Conflicts of Interest
The authors declare no conflict of interest.
References
- Malek-Zavarei, M.; Jamshidi, M. Time-Delay Systems: Analysis, Optimization and Applications; North-Holland: Amsterdam, The Netherlands, 1987. [Google Scholar]
- Gu, K.; Niculescu, S. Survey on Recent Results in the Stability and Control of Time-Delay Systems. ASME J. Dyn. Syst. Meas. Control 2003, 125, 158–165. [Google Scholar] [CrossRef]
- Green, M.; Limebeer, D.J.N. Linear Robust Control; Prentice Hall: New York, NY, USA, 1995. [Google Scholar]
- Ackermann, J. Robust Control; Springer: London, UK, 1993. [Google Scholar]
- Barmish, B.R. New Tools for Robustness of Linear Systems; Macmillan Publishing Co.: New York, NY, USA, 1994. [Google Scholar]
- Wu, M.; He, Y.; She, J. Stability Analysis and Robust Control of Time Delay Systems; Springer: Beijing, China, 2010. [Google Scholar]
- Kharitonov, V.L. Robust Stability Analysis of Time Delay Systems: A Survey. IFAC Proc. Vol. 1998, 31, 1–12. [Google Scholar] [CrossRef]
- Papachristodoulou, A.; Peet, M.; Lall, S. Constructing Lyapunov-Krasovskii Functionals For Linear Time Delay Systems. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 4, pp. 2845–2850. [Google Scholar]
- Seuret, A. Lyapunov-Krasovskii Functionals Parameterized with polynomials. IFAC Proc. Vol. 2009, 42, 214–219. [Google Scholar] [CrossRef]
- Duan, W.; Li, Y.; Chen, J. An enhanced stability criterion for linear time-delayed systems via new Lyapunov—Krasovskii functionals. Adv. Differ. Equ. 2020, 21. [Google Scholar] [CrossRef]
- Kharitonov, V.L. Asymptotic Stability of an Equilibrium Point Position of a Family of Systems of Linear Differential Equations. Plenum Publ. Corp. 1979, 1483–1485. [Google Scholar]
- Bartlett, A.C.; Hollot, C.V.; Lin, H. Root locations of an entire polytope of polynomials: It suffices to check the edges. Math. Control. Signals Sist. 1988, 1, 61–71. [Google Scholar] [CrossRef]
- Kalinina, E. Stability and D-stability of the family of real polynomials. Linear Algebra Appl. 2013, 438, 2635–2650. [Google Scholar] [CrossRef]
- Romero, G.; Zamora, P.; Díaz, I.; Pérez, I.; Lara, D. New Results to Verify the Robust Stability Property of Interval Plants with Time Delay. IFAC Proc. Vol. 2012, 45, 7–12. [Google Scholar] [CrossRef]
- Aguirre, B.; Villafuerte, R.; Luviano, A.; Loredo, C.; Díaz, E. A Panoramic Sketch about the Robust Stability of Time-Delay Systems and Its Applications. Complexity 2020, 2020, 1–26. [Google Scholar] [CrossRef]
- Manitius, A.; Olbrot, A. Finite Spectrum Assignment Problem for Systems with Delays. IEEE Trans. Autom. Control 1979, 24, 541–552. [Google Scholar] [CrossRef]
- Niculescu, S.L.; Dion, J.M.; Dugard, L. Robust stabilization for uncertain time-delay systems containing saturating actuators. IEEE Trans. Autom. Control 1996, 41, 742–747. [Google Scholar] [CrossRef]
- Mondie, S.; Michiels, W. Finite Spectrum Assignment of Unstable Time Delay Systems with a Safe Implementation. IEEE Trans. Autom. Control 2003, 48, 2207–2212. [Google Scholar] [CrossRef]
- Barmish, B.R.; Hollot, C.V.; Kraus, F.J.; Tempo, R. Extreme point results for robust stabilization of interval plants with first-order compensators. IEEE Trans. Autom. Control 1992, 37, 707–714. [Google Scholar] [CrossRef]
- Kharitonov, V.L.; Fu, M. Robust Synthesis of Time-Delay Systems. In Proceedings of the 32nd IEEE Conference on Decision and Control, San Antonio, TX, USA, 15–17 December 1993; pp. 326–327. [Google Scholar]
- Gao, Z. Robust stabilization of interval fractional-order plants with one time-delay by fractional-order controllers. J. Frankl. Inst. 2017, 354, 767–786. [Google Scholar] [CrossRef]
- Zheng, S.; Li, W. Robust stabilization of fractional-order plant with general interval uncertainties based on a graphical method. Int. J. Robust Nonlinear Control 2017, 28, 1672–1692. [Google Scholar] [CrossRef]
- Patre, B.M.; Deore, P.J. Robust stability and performance of interval process plant with interval time delay. Trans. Inst. Meas. Control 2011, 34, 627–634. [Google Scholar] [CrossRef]
- Matusu, R.; Senol, B.; Pekar, L. Robust PI Control of Interval Plants With Gain and Phase Margin Specifications: Application to a Continuous Stirred Tank Reactor. IEEE Access 2020, 8, 145372–145380. [Google Scholar] [CrossRef]
- Dasgupta, S. Kharitonov’s Theorem Revisited. Syst. Control Lett. 1988, 11, 381–384. [Google Scholar] [CrossRef]
- Romero, G.; Collado, J. Robust Stability of Interval Plants with Perturbed Time Delay. In Proceedings of the 1995 American Control Conference (ACC’95), Seattle, WA, USA, 21–23 June 1995; Volume 10, pp. 326–327. [Google Scholar]
- Chihara, T.S. An Introduction to Orthogonal Polynomials; Mathematics and its Applications Series 13; Gordon and Breach: New York, NY, USA, 1978. [Google Scholar]
- Ismail, M.E.H. Classical and Quantum Orthogonal Polynomials in One Variable. In Encyclopedia of Mathematics and Its Applications; Cambridge University Press: Cambridge/London, UK, 2005; Volume 98. [Google Scholar]
- Van Assche, W. Orthogonal polynomials, associated polynomials and functions of the second kind. J. Comput. Appl. Math. 1991, 37, 237–249. [Google Scholar] [CrossRef]
- Bochner, M. Über Sturm—Liouvillesche polynomsysteme. Math. Zeit. 1929, 29, 730–736. [Google Scholar] [CrossRef]
- Branquinho, A.; Marcellán, F.; Petronilho, J. Classical orthogonal polynomials: A functional approach. Acta Appl. Math. 1994, 34, 283–303. [Google Scholar]
- Szegö, G. Orthogonal Polynomials, 4th ed.; American Mathematical Society Colloquium Publications Series; American Mathematical Society: Providence, RI, USA, 1975; Volume 23. [Google Scholar]
- Arceo, A.; Garza, L.E.; Romero, G. Robust stability of hurwitz polynomials associated with modified classical weights. Mathematics 2019, 7, 818. [Google Scholar] [CrossRef]
- Andrews, G.; Askey, R.; Roy, R. Special Functions. In Encyclopedia of Mathematics and its Applications; Cambridge University Press: Cambridge/London, UK, 1999. [Google Scholar]
- Webster, R. Convexity, 3rd ed.; Oxford University Press: New York, NY, USA, 1994. [Google Scholar]
- Dlapa, M. Parametric uncertainties and time delay robust control design toolbox. IFAC-Papers Online 2015, 48, 296–301. [Google Scholar] [CrossRef]
- Romero, G.; Garcia, L.; Perez, I.; Dominguez, R.; Panduro, M.; Mendez, A. Robust Stability of the Hot-Dip Galvanizing Control Systems. Int. J. Autom. Control 2007, 1, 220–232. [Google Scholar] [CrossRef]
- Åström, K.J.; Wittenmark, B. Computer-Controller Systems: Theory and Design. In Prentice Hall Information and System Sciences, 3rd ed.; Prentice Hall Inc.: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Chen, C.-T. Linear Systems: Theory and Design. In Electrical and Computer Engineering, 3rd ed.; Oxford University Press Inc.: New York, NY, USA, 1999. [Google Scholar]
- Marcellán, F.; Dehesa, J.S.; Ronveaux, A. On orthogonal polynomials with perturbed recurrence relations. J. Comput. Appl. Math. 1990, 30, 203–212. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).