

Dynamic Performance Assessment of PMSG and DFIG-Based WECS with the Support of Manta Ray Foraging Optimizer Considering MPPT, Pitch Control, and FRT Capability Issues

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Modeling of the Studied WE Systems
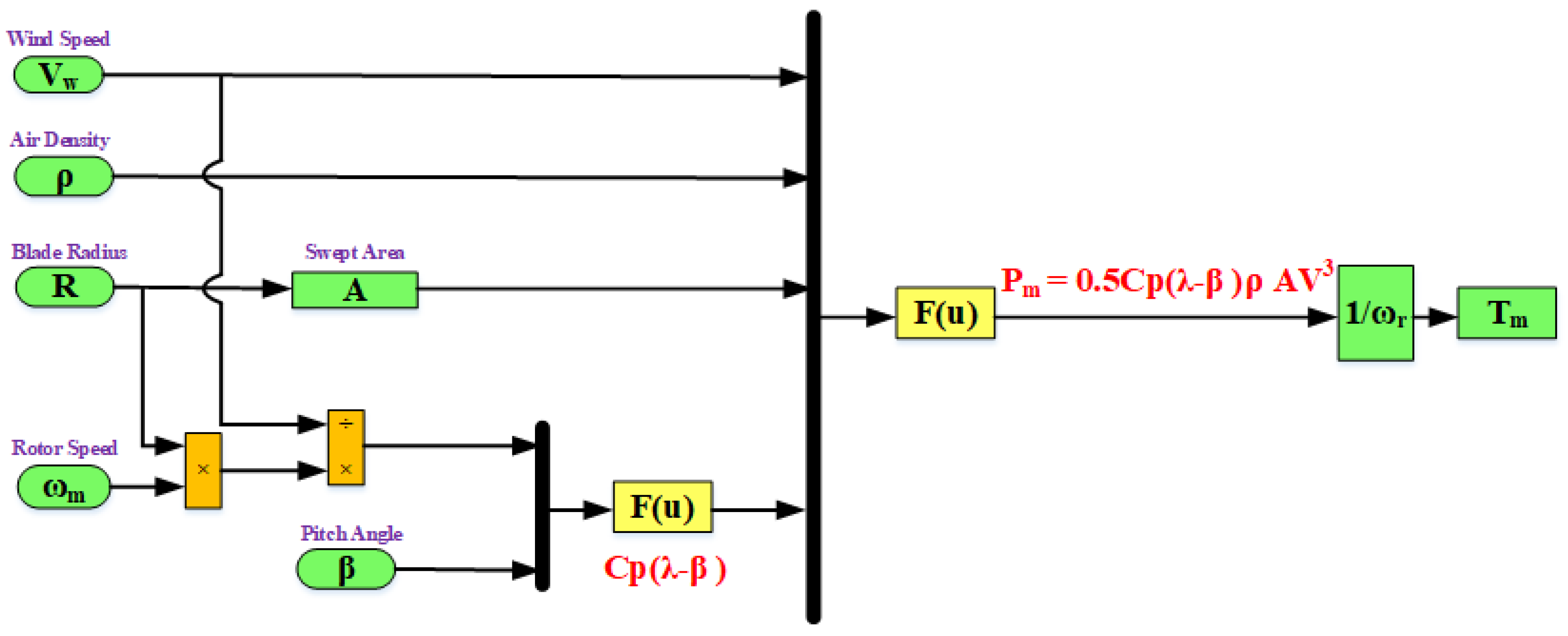
2.1. Modeling of the PMSWG
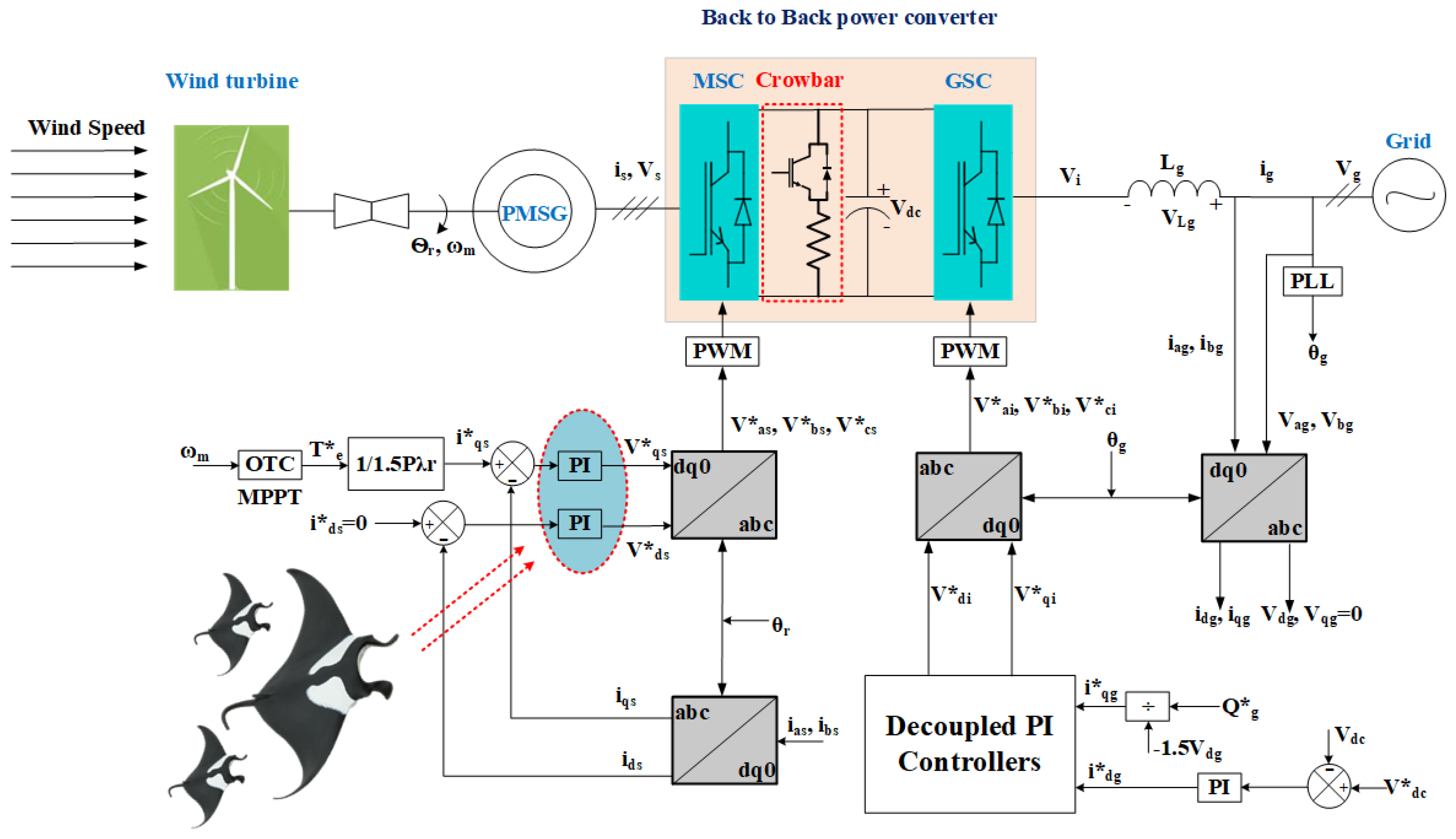
2.2. Modeling of the DFIWG
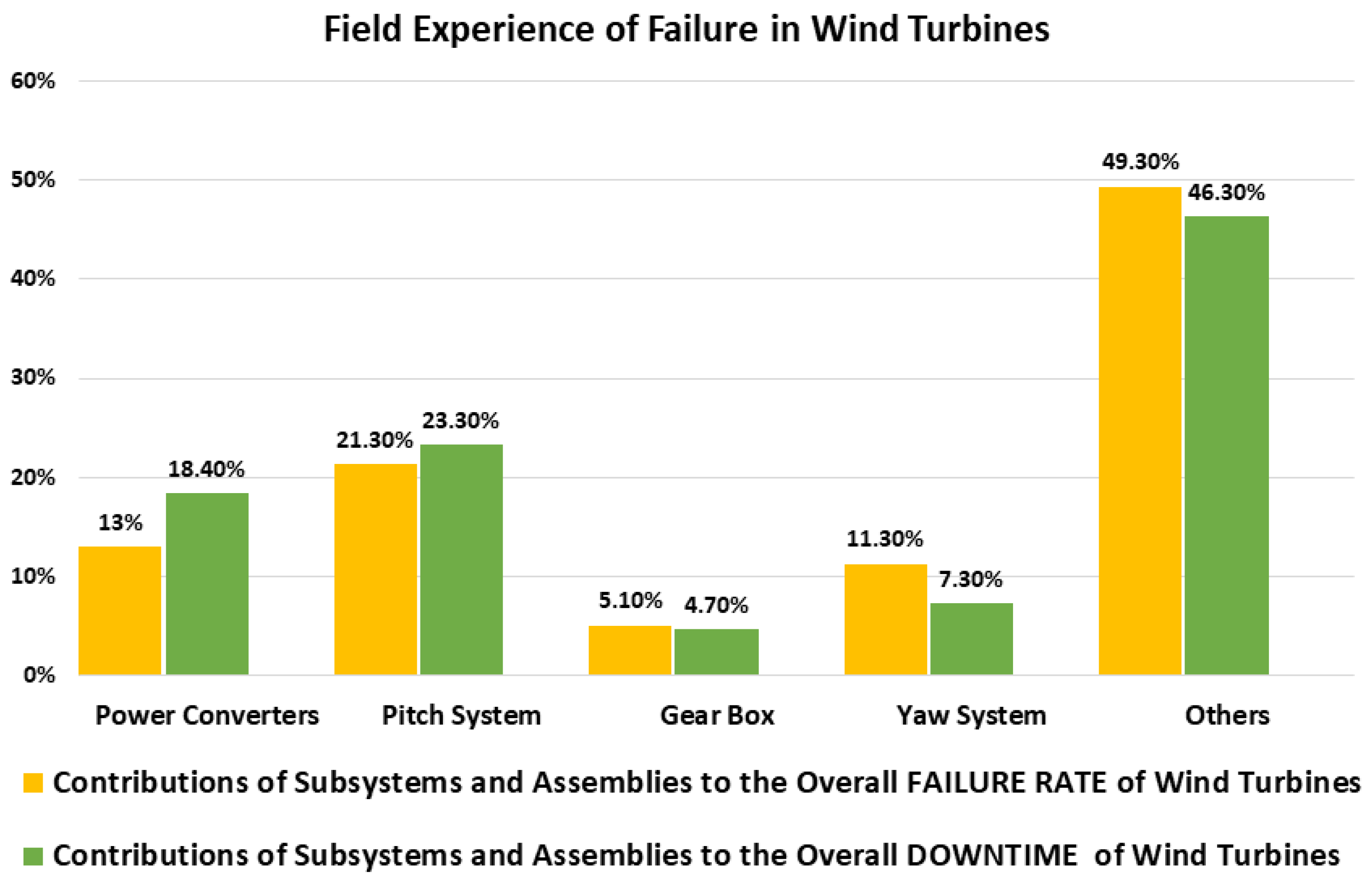
2.3. Development and Failure Ratio of Wind-Driven Power Generators
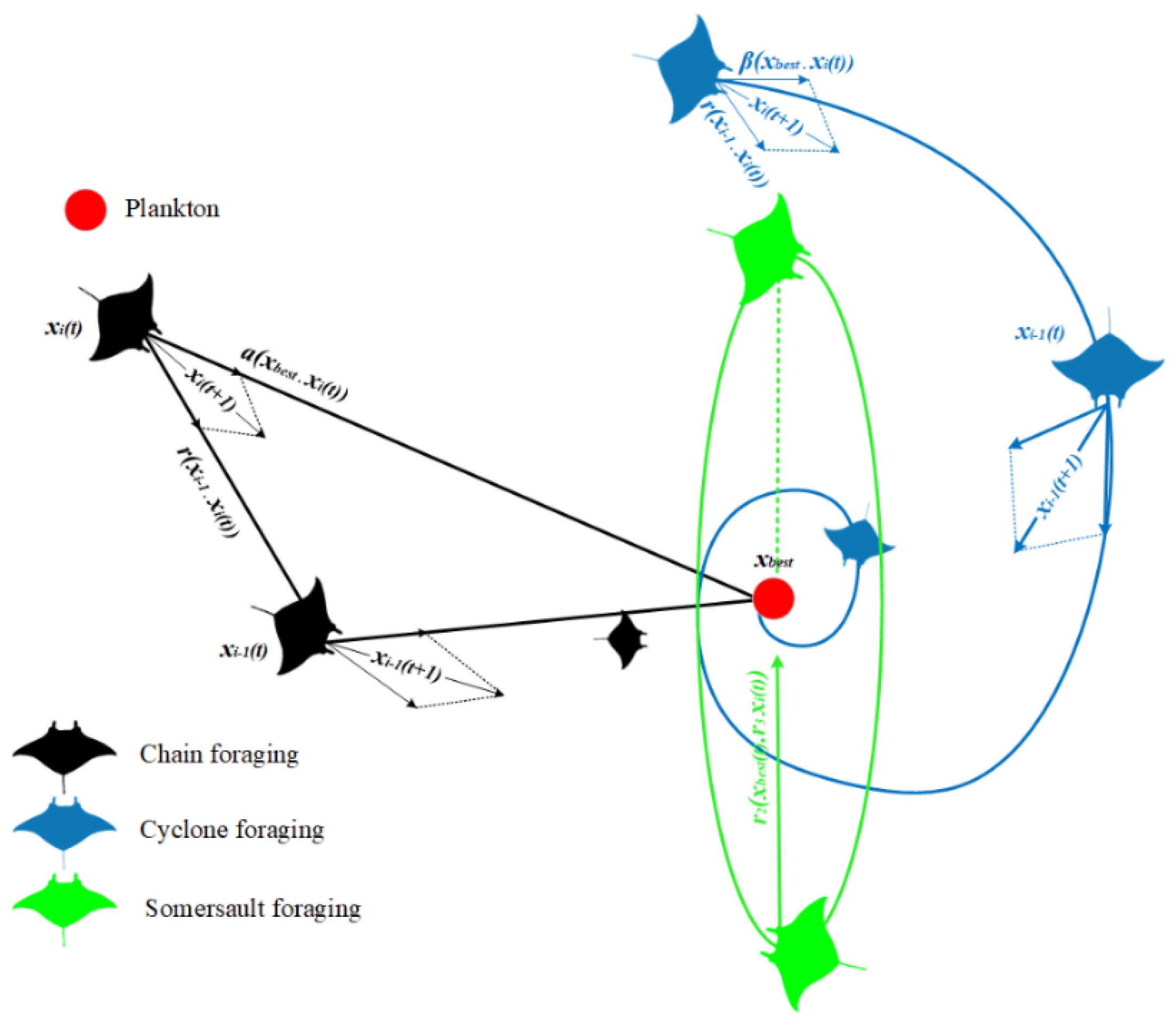
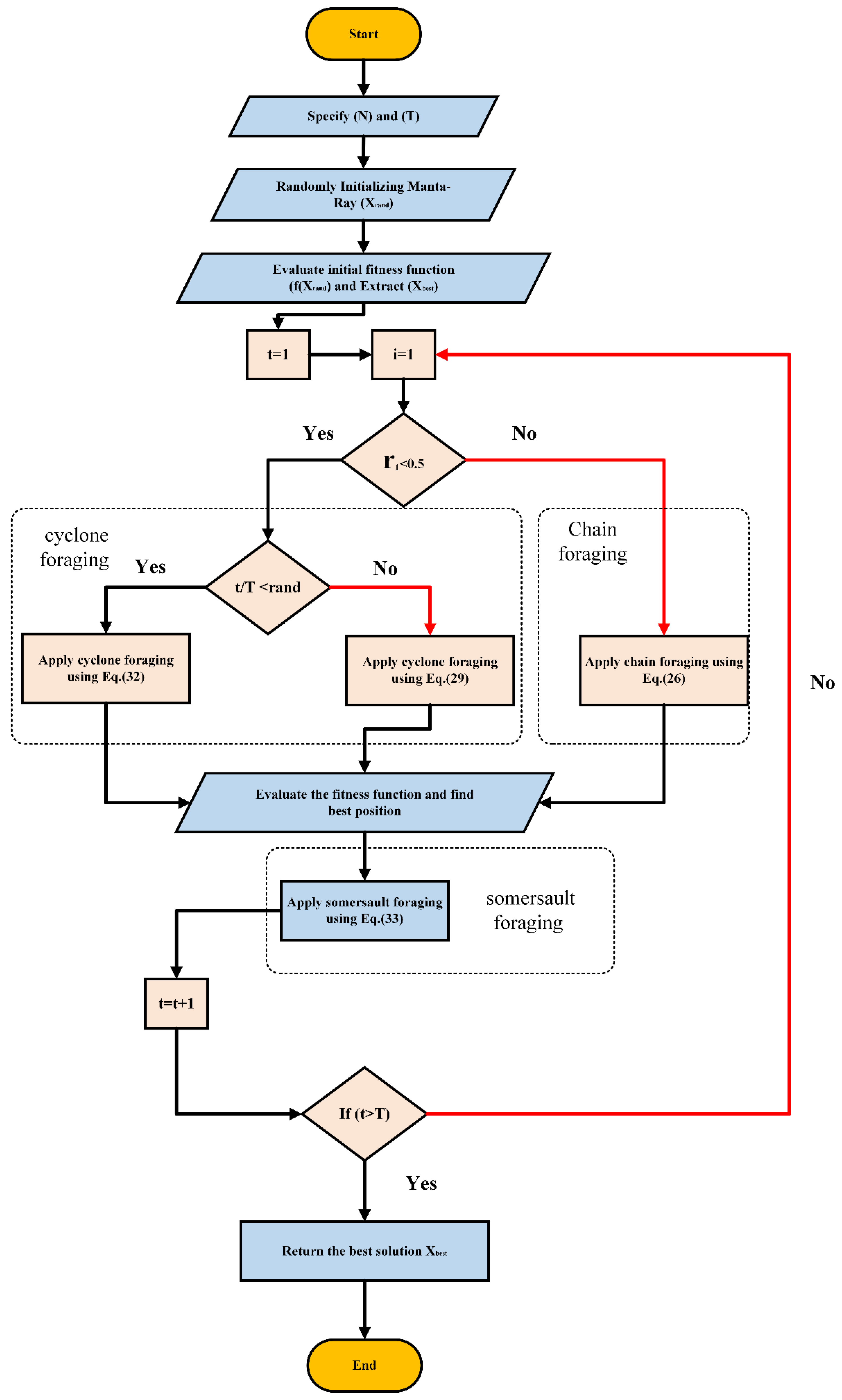
3. MRFO Algorithm
- (a)
- MRFO mathematical model
- (b)
- Application of MRFO
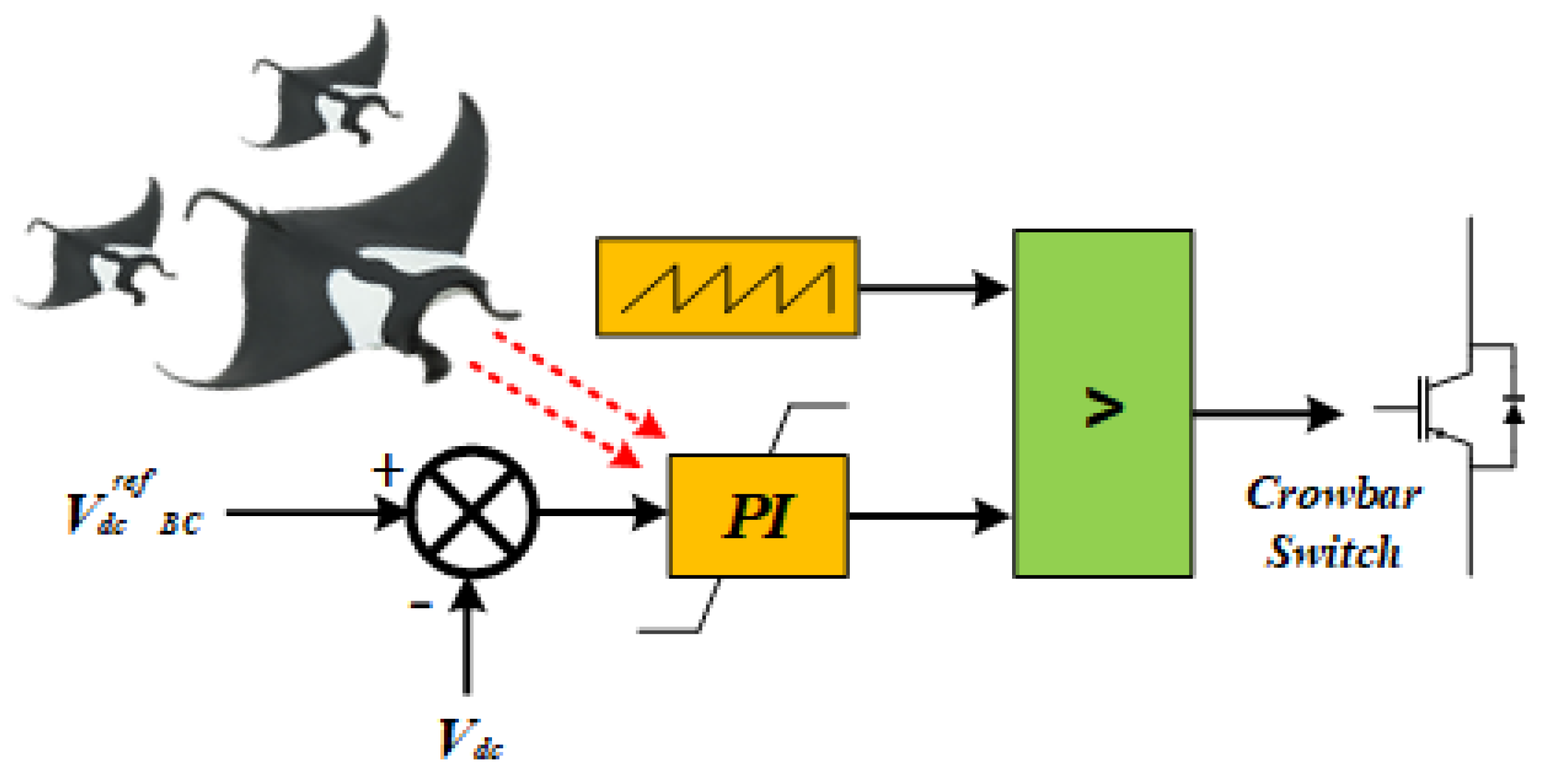
4. Crowbar Control System for Improving FRT Capability
5. Simulation Results and Discussion
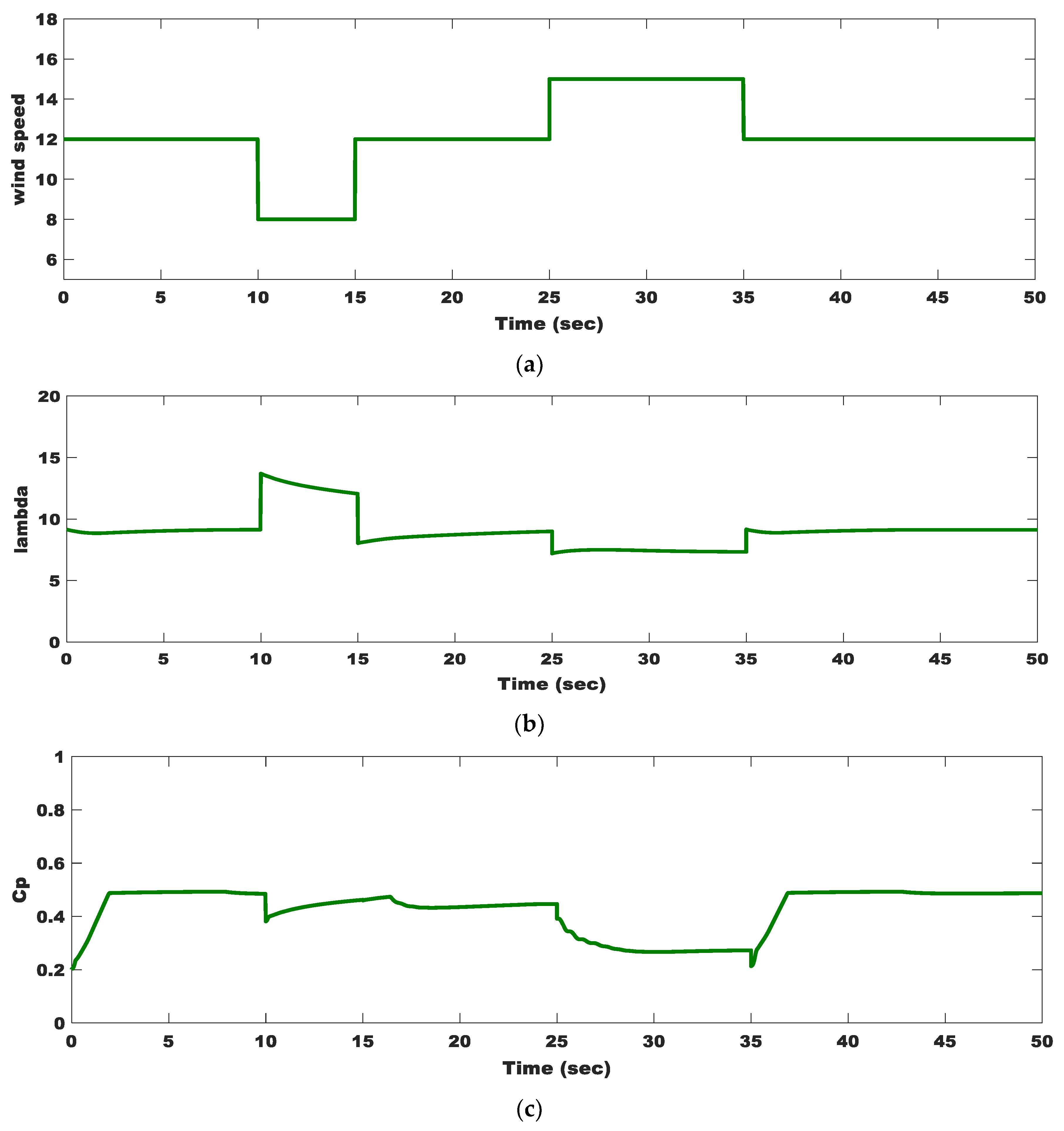
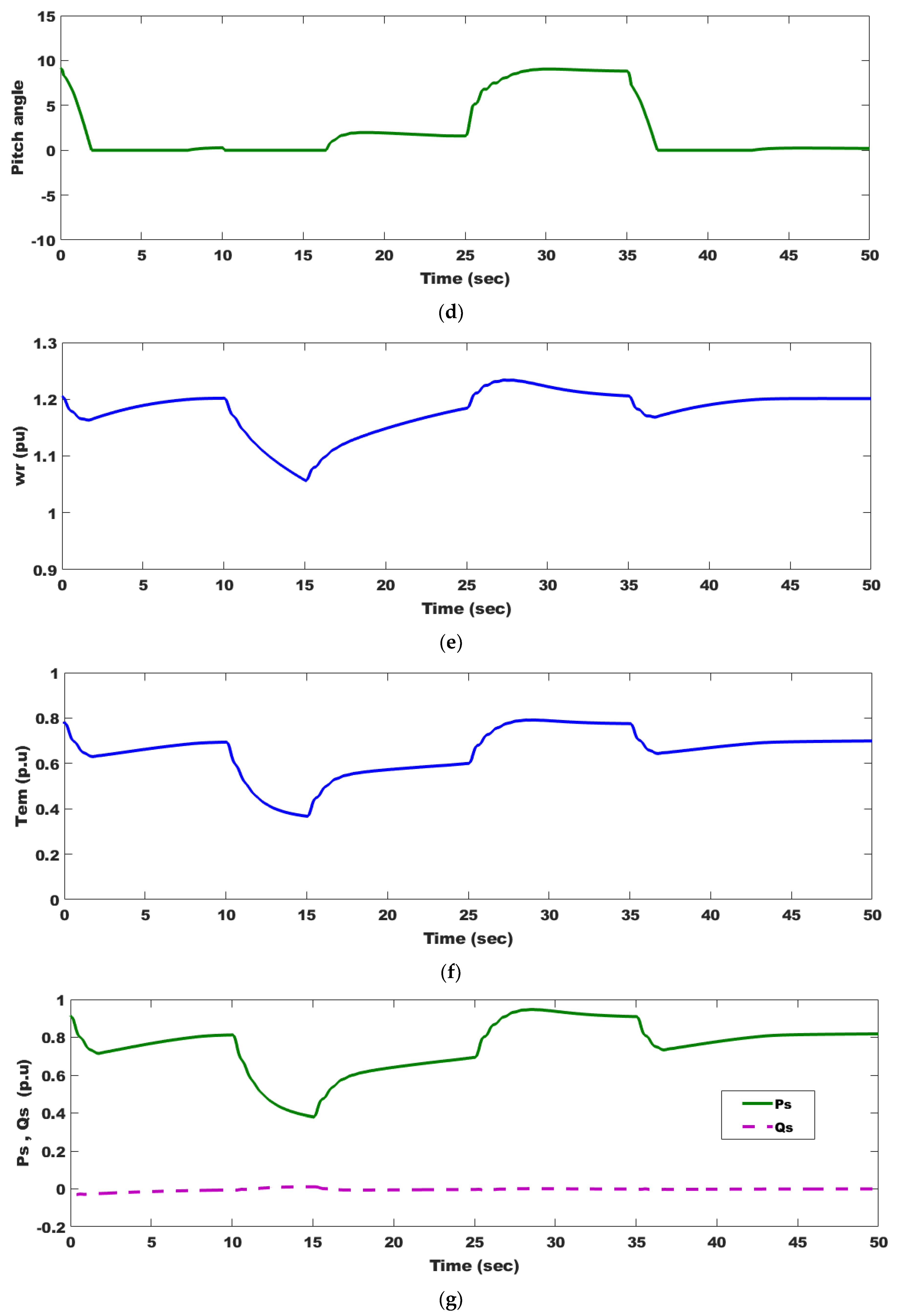
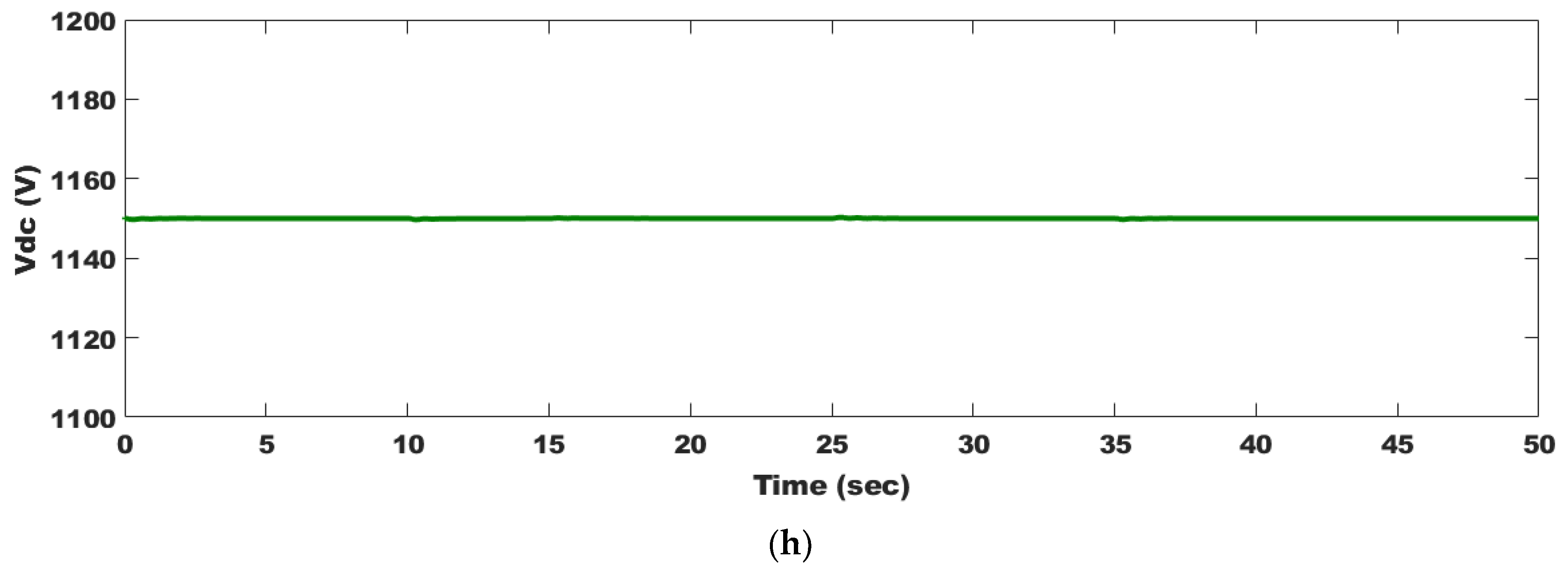
5.1. Impact of Wind Speed Variation under Regular Grid Conditions
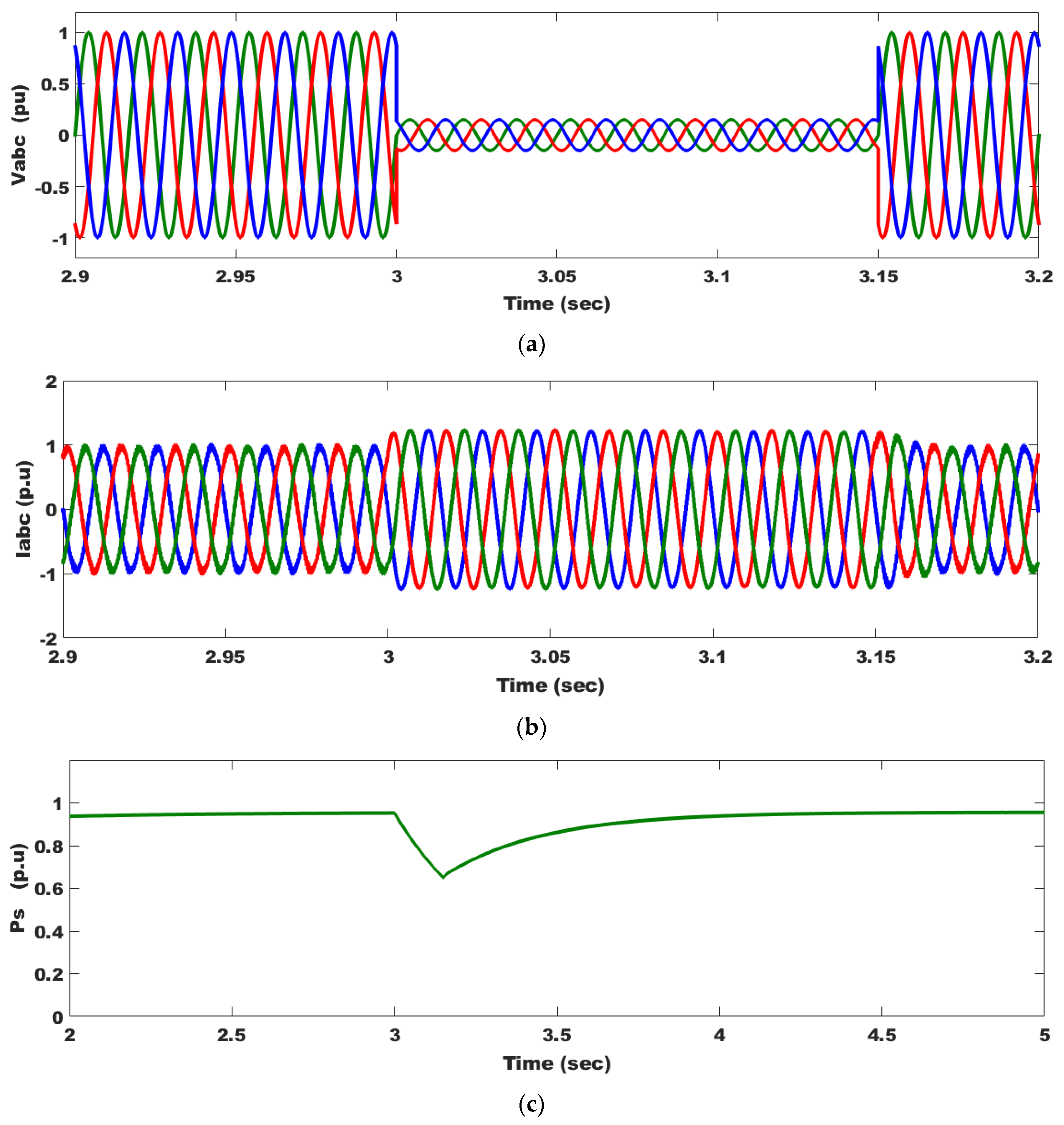
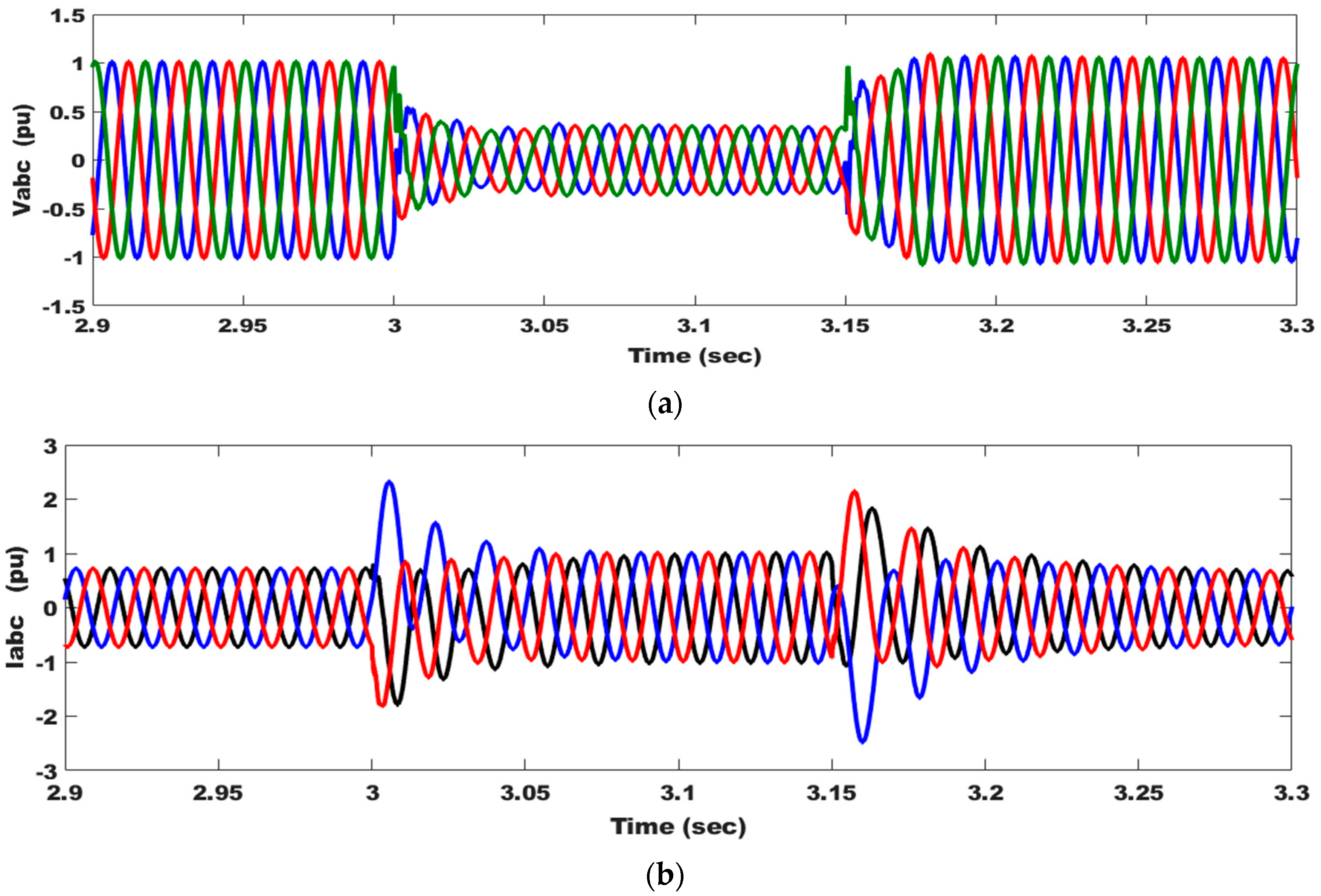
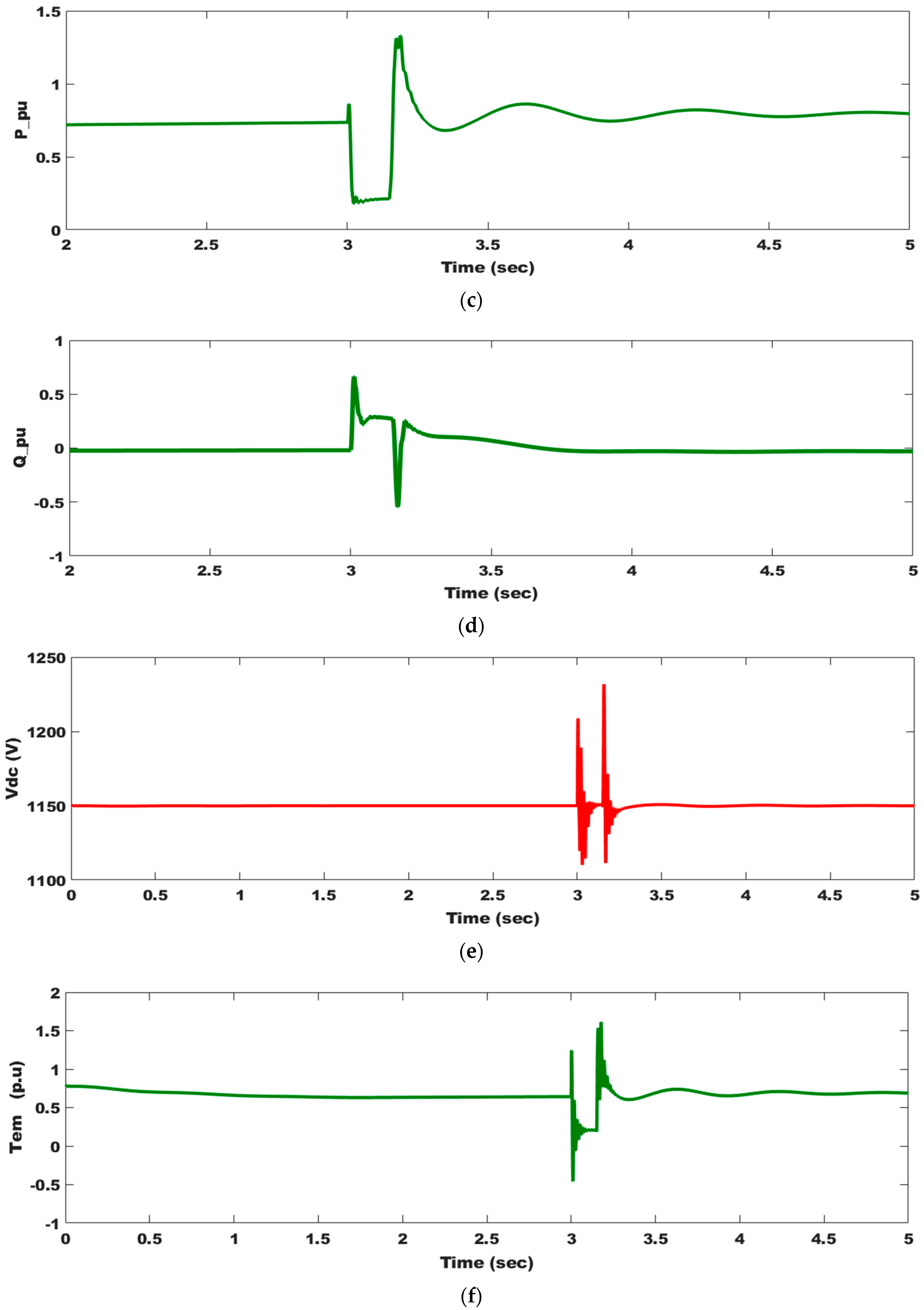
5.2. Realization of FRT under 85% Voltage Dip
5.3. Impact of Wind Speed Variation under Regular Grid Conditions
5.4. Realization of FRT at 85% Voltage Dip
6. Conclusions
- Both WGs are able to function in the PAC zone, have FRT capabilities, and have optimized controllers, all of which have a significant impact on how well they perform in the instances under study.
- The FRT issues may be made easier with an appropriate choice of controller gains based on the WT design. Compared with the majority of current FRT methods for WTs, this may be a more affordable method without taking external circuitry into account.
- Blocking of converters for the DFIWG was eliminated with the proposed technique, which is the main problem for DFIWGs.
- The change in the parameters of the studied wind systems was evident due to the violent change in wind speed and three-phase fault. The change was smaller in the PMSWG in the case of wind speed because it contained more poles; the change was smaller in the case of the fault due to the direct connection of the DFIWG to the network. Table 11 summarizes all the events and changes in parameters.
- The simulation results showed that the PMSWG was able to track the reference wind speed faster than the DFIWG, where the settling time for CP was found to be 0.784 s with the PMSWG compared with 1.248 s with the DFIWG.
- The results showed that, with the prosed schemes, the was below limits (1.02 under regular conditions and below 1.1 pu under faults).
- A small oscillation in the PMSWG, compared with the DFIWG, reveals that it has more power-smoothing capability.
- The simulation results showed the superiority of the PMSWG over the DFIWG, especially in the event of large disturbances due to the latter’s direct connection to the grid.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
List of Abbreviations
| EPSs: Electrical power systems | IEA: International energy agency |
| RESs: Renewable energy sources | PWM: Pulse-width modulation |
| WE: Wind energy | WTs: Wind turbines |
| VSWGs: Variable-speed wind generators | FRT: Fault ride-through |
| PMSWG: Permanent magnet synchronous wind generator | dq: Direct quadrature |
| DFIWG: Doubly-fed induction wind generator | BTB: Back-to-back |
| PIC: PI controller | PAC: Pitch angle control |
| MPPT: Maximum power point tracking | RSC: Rotor side converter |
| OTC: Optimal torque control | WF: Wind farm |
| Q: Reactive power | P: Active power |
| MRFO: Manta ray foraging optimizer | FCLs: Fault current limiters |
| FLC: Fuzzy logic control | SMC: Sliding mode control |
| CC: Control cost | MRs: Manta rays |
| FACTS: Flexible AC transmission systems | PSO: Particle swarm optimization |
| ANFIS: Adaptive neuro-fuzzy inference system | P&O: Perturb and observe |
| POCC: Point of common coupling | GSS: Golden section search |
| INC: Incremental conductance | MPC: Model predictive controller |
Appendix A
References
- Ahmadi, A.; Nezhad, A.E.; Hredzak, B. Security-Constrained Unit Commitment in Presence of Lithium-Ion Battery Storage Units Using Information-Gap Decision Theory. IEEE Trans. Ind. Inform. 2019, 15, 148–157. [Google Scholar] [CrossRef]
- Chen, C.; Li, C.; Reniers, G.; Yang, F. Safety and security of oil and gas pipeline transportation: A systematic analysis of research trends and future needs using WoS. J. Clean. Prod. 2021, 279, 123583. [Google Scholar] [CrossRef]
- Groissböck, M.; Gusmão, A. Impact of renewable resource quality on security of supply with high shares of renewable energies. Appl. Energy 2020, 277, 115567. [Google Scholar] [CrossRef]
- Radzka, E.; Rymuza, K.; Michalak, A. Wind power as a renewable energy source. J. Ecol. Eng. 2019, 20, 167–171. [Google Scholar] [CrossRef]
- ANEEL. Annual Wind Energy Report 2020. 2020. Available online: http://abeeolica.org.br/wp-content/uploads/2021/06/PT_Boletim-Anual-de-Geracao_2020.pdf (accessed on 1 January 2020).
- Jensen, C.U.; Panduro, T.E.; Lundhede, T.H.; Nielsen, A.S.E.; Dalsgaard, M.; Thorsen, B.J. The impact of on-shore and off-shore wind turbine farms on property prices. Energy Policy 2018, 116, 50–59. [Google Scholar] [CrossRef]
- Pilpola, S.; Lund, P.D. Different flexibility options for better system integration of wind power. Energy Strateg. Rev. 2019, 26, 100368. [Google Scholar] [CrossRef]
- Holttinen, H. Wind integration: Experience, issues, and challenges. Wiley Interdiscip. Rev. Energy Environ. 2012, 1, 243–255. [Google Scholar] [CrossRef]
- Ahmed, S.D.; Al-Ismail, F.S.M.; Shafiullah, M.; Al-Sulaiman, F.A.; El-Amin, I.M. Grid Integration Challenges of Wind Energy: A Review. IEEE Access 2020, 8, 10857–10878. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Aly, M.M.; Salama, H.S.; Abdel-Rahim, A.M.M. Dynamic evaluation of optimization techniques–based proportional–integral controller for wind-driven permanent magnet synchronous generator. Wind Eng. 2021, 45, 696–709. [Google Scholar] [CrossRef]
- Xing, F.; Xu, Z.; Zhang, Z.; Dan, Y.; Zhu, Y. Resonance stability analysis of large-scale wind power bases with type-IV wind generators. Energies 2020, 13, 5220. [Google Scholar] [CrossRef]
- Majout, B.; El Alami, H.; Salime, H.; Laabidine, N.Z.; El Mourabit, Y.; Motahhir, S.; Bouderbala, M.; Karim, M.; Bossoufi, B. A Review on Popular Control Applications in Wind Energy Generator PMSG. Energy 2022, 15, 6238. [Google Scholar]
- Shehata, E.G. A comparative study of current control schemes for a direct-driven PMSG wind energy generation system. Electr. Power Syst. Res. 2017, 143, 197–205. [Google Scholar] [CrossRef]
- Xu, Y.; An, L.T.; Jia, X.P.; Jia, B.Z.; Maki, N. Optimization study of the main parameters of different types of wind turbine generators. Supercond. Sci. Technol. 2022, 35, 035007. [Google Scholar] [CrossRef]
- Kumar, D.; Chatterjee, K. A review of conventional and advanced MPPT algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Buduma, P.; Vulisi, N.K.; Panda, G. Robust Control and Kalman MPPT for Grid-Assimilated Wind Energy Conversion System. IEEE Trans. Ind. Appl. 2021, 57, 1274–1284. [Google Scholar] [CrossRef]
- Xu, S.; Shao, R.; Cao, B.; Chang, L. Single-phase grid-connected PV system with golden section search-based MPPT algorithm. Chin. J. Electr. Eng. 2021, 7, 25–36. [Google Scholar] [CrossRef]
- Bayrak, G.; Ghaderi, D. An improved step-up converter with a developed real-time fuzzy-based MPPT controller for PV-based residential applications. Int. Trans. Electr. Energy Syst. 2019, 29, 12140. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F.; Bhaskar, M.S. An Experimental Estimation of Hybrid ANFIS-PSO-Based MPPT for PV Grid Integration under Fluctuating Sun Irradiance. IEEE Syst. J. 2020, 14, 1218–1229. [Google Scholar] [CrossRef]
- Dong, Z.; Li, Z.; Dong, Y.; Jiang, S.; Ding, Z. Fully-distributed deloading operation of DFIG-based wind farm for load sharing. IEEE Trans. Sustain. Energy 2021, 12, 430–440. [Google Scholar] [CrossRef]
- Okedu, K.E.; Barghash, H.F.A. Investigating Variable Speed Wind Turbine Transient Performance Considering Different Inverter Schemes and SDBR. Front. Energy Res. 2021, 8, 604338. [Google Scholar] [CrossRef]
- Marques, G.; Silva, F.A. Doubly Fed Induction Machine ? Modeling and Control for Wind Energy Generation [Book News]. IEEE Ind. Electron. Mag. 2015, 9, 54–55. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Aly, M.M.; Abdel-Rahim, A.M.M. Enhancing the dynamic performance of a wind-driven PMSG implementing different optimization techniques. SN Appl. Sci. 2020, 2, 684. [Google Scholar] [CrossRef] [Green Version]
- Mahmoud, M.M.; Ratib, M.K.; Aly, M.M.; Moamen, A.; Rahim, M.A. Effect of Grid Faults on Dominant Wind Generators for Electric Power System Integration: A Comparison and Assessment. Energy Syst. Res. 2021, 4, 70–78. [Google Scholar]
- Mahela, O.P.; Gupta, N.; Khosravy, M.; Patel, N. Comprehensive overview of low voltage ride through methods of grid integrated wind generator. IEEE Access 2019, 7, 99299–99326. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Hemeida, A.M.; Senjy, T.; Ewais, A.M. Fault Ride-Through Capability Enhancement for Grid-Connected Permanent Magnet Synchronous Generator Driven by Wind Turbines. In Proceedings of the IEEE Conference on Power Electronics and Renewable Energy, CPERE 2019, Aswan City, Egypt, 23–25 October 2019; pp. 567–572. [Google Scholar]
- Swain, S.; Ray, P.K. Short circuit fault analysis in a grid connected DFIG based wind energy system with active crowbar protection circuit for ridethrough capability and power quality improvement. Int. J. Electr. Power Energy Syst. 2017, 84, 64–75. [Google Scholar] [CrossRef]
- Mossa, M.A.; Abdelhamid, M.K.; Hassan, A.A.; Bianchi, N. Improving the Dynamic Performance of a Variable Speed DFIG for Energy Conversion Purposes Using an Effective Control System. Processes 2022, 10, 456. [Google Scholar] [CrossRef]
- El Moursi, M.S.; Zeineldin, H.H. A parallel capacitor control strategy for enhanced FRT capability of DFIG. IEEE Trans. Sustain. Energy 2014, 6, 303–312. [Google Scholar]
- Hiremath, R.; Moger, T. Comprehensive review on low voltage ride through capability of wind turbine generators. Int. Trans. Electr. Energy Syst. 2020, 30, 12524. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Mohamed Hemeida, A.; Abdel-Rahim, A.M.M. Behavior of PMSG Wind Turbines with Active Crowbar Protection under Faults. In Proceedings of the 2019 Innovations in Power and Advanced Computing Technologies, i-PACT 2019, Vellore, India, 22–23 March 2019; pp. 1–6. [Google Scholar]
- Mohammadi, J.; Afsharnia, S.; Vaez-Zadeh, S.; Farhangi, S. Improved fault ride through strategy for doubly fed induction generator based wind turbines under both symmetrical and asymmetrical grid faults. IET Renew. Power Gener. 2016, 10, 1114–1122. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Aly, M.M.; Salama, H.S.; Abdel-Rahim, A.M.M. An internal parallel capacitor control strategy for DC-link voltage stabilization of PMSG-based wind turbine under various fault conditions. Wind Eng. 2021, 46, 983–992. [Google Scholar] [CrossRef]
- Tohidi, S.; Behnam, M.I. A comprehensive review of low voltage ride through of doubly fed induction wind generators. Renew. Sustain. Energy Rev. 2016, 57, 412–419. [Google Scholar] [CrossRef]
- Angala Parameswari, G.; Habeebullah Sait, H. A comprehensive review of fault ride-through capability of wind turbines with grid-connected doubly fed induction generator. Int. Trans. Electr. Energy Syst. 2020, 30, 12395. [Google Scholar] [CrossRef]
- Zheng, Z.; Xie, Q.; Xiao, X.; Zhou, Y. Review of SMES and SFCL Based FRT Strategy for PMSG-Based Wind Turbine Generator. In Proceedings of the 2020 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices, ASEMD 2020, Tianjin, China, 16–18 October 2020. [Google Scholar]
- Mahmoud, M.M.; Esmail, Y.M.; Atia, B.S.; Kamel, O.M.; Aboras, K.M.; Bajaj, M.; Sabir, S.; Bukhari, H.; Eutyche, D.; Wapet, M. Voltage Quality Enhancement of Low-Voltage Smart Distribution System Using Robust and Optimized DVR Controllers: Application of the Harris Hawks Algorithm. Int. Trans. Electr. Energy Syst. 2022, 2022, 18. [Google Scholar] [CrossRef]
- Tourou, P.; Sourkounis, C. Review of control strategies for DFIG-based wind turbines under unsymmetrical grid faults. In Proceedings of the 2014 9th International Conference on Ecological Vehicles and Renewable Energies, EVER 2014, Monte-Carlo, Monaco, 25–27 March 2014. [Google Scholar]
- Adetokun, B.B.; Muriithi, C.M. Impact of integrating large-scale DFIG-based wind energy conversion system on the voltage stability of weak national grids: A case study of the Nigerian power grid. Energy Rep. 2021, 7, 654–666. [Google Scholar] [CrossRef]
- Nasiri, M.; Mohammadi, R. Peak Current Limitation for Grid Side Inverter by Limited Active Power in PMSG-Based Wind Turbines During Different Grid Faults. IEEE Trans. Sustain. Energy 2017, 8, 3–12. [Google Scholar] [CrossRef]
- Gencer, A. Analysis and control of fault ride through capability improvement pmsg based on WECS using active crowbar system during different fault conditions. Elektron. Ir Elektrotechnika 2018, 24, 63–69. [Google Scholar] [CrossRef] [Green Version]
- Moghimian, M.M.; Radmehr, M.; Firouzi, M. Series Resonance Fault Current Limiter (SRFCL) with MOV for LVRT Enhancement in DFIG-Based Wind Farms. Electr. Power Compon. Syst. 2019, 47, 1814–1825. [Google Scholar] [CrossRef]
- Firouzi, M.; Nasiri, M.; Benbouzid, M.; Gharehpetian, G.B. Application of multi-step bridge-type fault current limiter for fault ride-through capability enhancement of permanent magnet synchronous generator-based wind turbines. Int. Trans. Electr. Energy Syst. 2020, 30, 12611. [Google Scholar] [CrossRef]
- Islam, M.R.; Hasan, J.; Shipon, M.R.R.; Sadi, M.A.H.; Abuhussein, A.; Roy, T.K. Neuro Fuzzy Logic Controlled Parallel Resonance Type Fault Current Limiter to Improve the Fault Ride through Capability of DFIG Based Wind Farm. IEEE Access 2020, 8, 115314–115334. [Google Scholar] [CrossRef]
- Sadi, M.A.H.; Abuhussein, A.; Shoeb, M.A. Transient Performance Improvement of Power Systems Using Fuzzy Logic Controlled Capacitive-Bridge Type Fault Current Limiter. IEEE Trans. Power Syst. 2021, 36, 323–335. [Google Scholar] [CrossRef]
- Shafiee, M.R.; Kartijkolaie, H.S.; Firouzi, M.; Mobayen, S.; Fekih, A. A Dynamic Multi-Cell FCL to Improve the Fault Ride through Capability of DFIG-Based Wind Farms. Energies 2020, 13, 6071. [Google Scholar] [CrossRef]
- Firouzi, M.; Nasiri, M.; Mobayen, S.; Gharehpetian, G.B. Sliding Mode Controller-Based BFCL for Fault Ride-Through Performance Enhancement of DFIG-Based Wind Turbines. Complexity 2020, 2020, 1259539. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. A Grey Wolf Optimizer for Optimum Parameters of Multiple PI Controllers of a Grid-Connected PMSG Driven by Variable Speed Wind Turbine. IEEE Access 2018, 6, 44120–44128. [Google Scholar] [CrossRef]
- Ghany, A.A.; Shehata, E.G.; Elsayed, A.H.M.; Mohamed, Y.S.; Alhelou, H.H.; Siano, P.; Diab, A.A.Z. Novel switching frequency fcs-mpc of pmsg for grid-connected wind energy conversion system with coordinated low voltage ride through. Electron. 2021, 10, 492. [Google Scholar] [CrossRef]
- Majout, B.; Bossoufi, B.; Bouderbala, M.; Masud, M.; Al-Amri, J.F.; Taoussi, M.; El Mahfoud, M.; Motahhir, S.; Karim, M. Improvement of PMSG-Based Wind Energy Conversion System Using Developed Sliding Mode Control. Energies 2022, 15, 1625. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Aly, M.M.; Salama, H.S.; Abdel-Rahim, A.M.M. A combination of an OTC based MPPT and fuzzy logic current control for a wind-driven PMSG under variability of wind speed. Energy Syst. 2022, 13, 1075–1098. [Google Scholar] [CrossRef]
- Mahmoud, M.M. Improved current control loops in wind side converter with the support of wild horse optimizer for enhancing the dynamic performance of PMSG-based wind generation system. Int. J. Model. Simul. 2022, 1–15. [Google Scholar] [CrossRef]
- Metwally Mahmoud, M.; Salama, H.S.; Aly, M.M.; Abdel-Rahim, A.M.M. Design and implementation of FLC system for fault ride-through capability enhancement in PMSG-wind systems. Wind Eng. 2021, 45, 1361–1373. [Google Scholar] [CrossRef]
- Zhu, D.; Zou, X.; Zhou, S.; Dong, W.; Kang, Y.; Hu, J. Feedforward Current References Control for DFIG-Based Wind Turbine to Improve Transient Control Performance During Grid Faults. IEEE Trans. Energy Convers. 2018, 33, 670–681. [Google Scholar] [CrossRef]
- Mohammadi, J.; Vaez-Zadeh, S.; Ebrahimzadeh, E.; Blaabjerg, F. Combined control method for grid-side converter of doubly fed induction generatorbased wind energy conversion systems. IET Renew. Power Gener. 2018, 12, 943–952. [Google Scholar] [CrossRef]
- Nair, A.R.; Bhattarai, R.; Smith, M.; Kamalasadan, S. Parametrically Robust Identification Based Sensorless Control Approach for Doubly Fed Induction Generator. IEEE Trans. Ind. Appl. 2021, 57, 1024–1034. [Google Scholar] [CrossRef]
- Wadawa, B.; Errami, Y.; Obbadi, A.; Sahnoun, S. Robustification of the H∞ controller combined with fuzzy logic and PI&PID-Fd for hybrid control of Wind Energy Conversion System Connected to the Power Grid Based on DFIG. Energy Rep. 2021, 7, 7539–7571. [Google Scholar] [CrossRef]
- Chojaa, H.; Derouich, A.; Taoussi, M.; Chehaidia, S.E.; Zamzoum, O.; Mosaad, M.I.; Alhejji, A.; Yessef, M. Nonlinear Control Strategies for Enhancing the Performance of DFIG-Based WECS under a Real Wind Profile. Energies 2022, 15, 6650. [Google Scholar] [CrossRef]
- Shiravani, F.; Cortajarena, J.A.; Alkorta, P.; Barambones, O. Generalized Predictive Control Scheme for a Wind Turbine System. Sustainability 2022, 14, 8865. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electric Machinery and Drive Systems; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar] [CrossRef]
- Nkosi, N.R.; Bansal, R.C.; Adefarati, T.; Naidoo, R.M.; Bansal, S.K. A review of small-signal stability analysis of DFIG-based wind power system. Int. J. Model. Simul. 2022, 1–18. [Google Scholar] [CrossRef]
- IRENA. Renewable Capacity Statistics 2020. 2020. Available online: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2020/Mar/IRENA_RE_Capacity_Statistics_2020.pdf (accessed on 1 January 2020).
- Chao, H.; Hu, B.; Xie, K.; Tai, H.M.; Yan, J.; Li, Y. A Sequential MCMC Model for Reliability Evaluation of Offshore Wind Farms Considering Severe Weather Conditions. IEEE Access 2019, 7, 132552–132562. [Google Scholar] [CrossRef]
- Qiu, Y.; Feng, Y.; Sun, J.; Zhang, W.; Infield, D. Applying thermophysics for wind turbine drivetrain fault diagnosis using SCADA data. IET Renew. Power Gener. 2016, 10, 661–668. [Google Scholar] [CrossRef] [Green Version]
- Xie, S.; Wang, X.; Qu, C.; Wang, X.; Guo, J. Impacts of different wind speed simulation methods on conditional reliability indices. Int. Trans. Electr. Energy Syst. 2013, 20, 1–6. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z. Overview of different wind generator systems and their comparisons. IET Renew. Power Gener. 2008, 2, 123–138. [Google Scholar] [CrossRef] [Green Version]
- Kahraman, H.T.; Akbel, M.; Duman, S. Optimization of optimal power flow problem using multi-objective manta ray foraging optimizer. Appl. Soft Comput. 2022, 116, 108334. [Google Scholar] [CrossRef]
- Selem, S.I.; Hasanien, H.M.; El-Fergany, A.A. Parameters extraction of PEMFC’s model using manta rays foraging optimizer. Int. J. Energy Res. 2020, 44, 4629–4640. [Google Scholar] [CrossRef]
- Micev, M.; Ćalasan, M.; Ali, Z.M.; Hasanien, H.M.; Abdel Aleem, S.H.E. Optimal design of automatic voltage regulation controller using hybrid simulated annealing—Manta ray foraging optimization algorithm. Ain Shams Eng. J. 2021, 12, 641–657. [Google Scholar] [CrossRef]
- Yuan, L.; Meng, K.; Huang, J.; Yang Dong, Z.; Zhang, W.; Xie, X. Development of HVRT and LVRT control strategy for pmsg-based wind turbine generators y. Energies 2020, 13, 5442. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Refs. | Publisher | Year | Developed Controllers | Contribution of Study | Remarks | |||
|---|---|---|---|---|---|---|---|---|
| MSC | GSC | MPPT | PAC | FRT | ||||
| [13] | Elsevier | 2017 | ✓ | ✗ | ✓ | ✗ | ✓ | Three different control systems (PI, ISMC, and FCS-MPC) were provided, and their effectiveness was evaluated. Outcome: FCS-MPC was the fastest controller, whereas ISMC had the best performance. |
| [23] | Springer | 2020 | ✓ | ✗ | ✓ | ✗ | ✓ | A PSO, WOA, and GWO-based PI controller was given. GWO performed more smoothly and quickly than the other approaches that were being compared. |
| [48] | IEEE | 2018 | ✓ | ✓ | ✗ | ✗ | ✓ | The system was improved by figuring out the PI controller optimum gain values using the GWO, GA, and simplex methods. The GWO method was reported to have the best convergence to the minimal value, as well as the finest reaction to faults. |
| [49] | MDPI | 2021 | ✗ | ✓ | ✗ | ✗ | ✓ | The variable switching frequency issue in the traditional FCS-MPC was fixed by a unique MMPC, which also resulted in decreased THD in stator current and shorter simulation times. A coordinated LVRT was used under faults, and the MMPC operated smoothly and with a quick dynamic response. |
| [50] | MDPI | 2022 | ✓ | ✓ | ✓ | ✗ | ✗ | Adjusted the machine and GSC to follow the MPPT-established standard for wind speed and to address the chattering issue brought on by the traditional SMC. It was superior to five modern controllers under wind variations. |
| [51] | Springer | 2022 | ✓ | ✗ | ✓ | ✓ | ✗ | OTC along with an FLC was implemented to decrease installation costs and improve the system’s overall efficiency. FLC was superior to PI under two wind profiles. |
| [52] | Taylor & Francis | 2022 | ✓ | ✗ | ✓ | ✗ | ✓ | Optimized PI controller with WHO was presented. WHO was superior to the Ziglar–Nicolas method in terms of fast transient response and smooth operation. |
| [53] | SAGE | 2021 | ✗ | ✓ | ✗ | ✗ | ✓ | In addition to backing choppers, FLC was employed to enhance system performance in the event of three-phase faults. In terms of quick transient reaction and lag-free operation, FLC outperformed PI. |
| Current study | ✓ | ✗ | ✓ | ✓ | ✓ | With the MRFO-PI control of MSC and BC, the three issues are realized. This is the first study that considers the three issues. The optimized controller has a fast response and smooth operation | ||
| Refs. | Publisher | Year | Developed Controllers | Contribution of Study | Remarks | |||
|---|---|---|---|---|---|---|---|---|
| RSC | GSC | MPPT | PAC | FRT | ||||
| [54] | IEEE | 2018 | ✓ | ✗ | ✗ | ✗ | ✓ | Applied feed-forward current control that reduced the transient current in the rotor circuit when a fault quickly occurred. |
| [55] | IET-Wiely | 2018 | ✗ | ✓ | ✗ | ✗ | ✓ | The overcurrents in the stator and rotor were decreased, and Q was quickly injected during voltage dips, using a combined vector and direct power controller. |
| [56] | IEEE | 2021 | ✓ | ✓ | ✓ | ✗ | ✓ | In order to mitigate (malfunctioning of sensors and parameter fluctuations) and assure acceptable performance during faults or wind speed conditions, a modified adaptive control architecture was added to the existing conventional vector control and was effective. |
| [47] | Hindawi | 2020 | ✗ | ✗ | ✗ | ✗ | ✓ | To improve system performance, a nonlinear SMC-based FCL was linked at the POCC. The results showed that SMC performs well with nonlinear dynamics and unanticipated voltage dip levels. |
| [46] | MDPI | 2020 | ✗ | ✗ | ✗ | ✗ | ✓ | The dynamic adaptive multi-cell FCL topology was coupled at the POCC, which significantly improved system performance and offered an adaptable voltage dip compensation mechanism depending on the level of voltage. Comparison assessment with the single-cell FCL verified the suggested scheme’s efficacy. |
| [57] | Elsevier | 2021 | ✓ | ✓ | ✓ | ✓ | ✗ | Performance comparisons between the FLC, H infinity (H∞), and PI controllers were conducted, and H∞ was shown to be the best. Mixed controllers, calledthe FL-H∞, and PI- andPID-filter derivative (Fd)-H∞ gave better performance and resulted in decreasing harmonics. |
| [58] | MDPI | 2022 | ✓ | ✗ | ✓ | ✓ | ✗ | The precision of the three controllers (SM, PI, and advanced backstepping (AB)), which provided the lowest tracking error, was studied and assessed. The ABC’s benefits included target monitoring, current waveform compatibility, quick response times, and robustness. |
| [59] | MDPI | 2022 | ✓ | ✗ | ✓ | ✓ | ✗ | The MPC system was utilized to maximize the amount of wind energy extracted, even when the wind speed was erratic or the WT was uncertain, and it was more efficient than the PI type. |
| Current study | ✓ | ✗ | ✓ | ✓ | ✓ | With the MRFO-PI control of RSC and crowbar, the three issues were realized. This is the first study that considers the three vital issues. The optimized controller had a fast response and smooth operation. | ||
| Manufacturer | Concept | Rotor Diameter (m) | Power Range (MW) |
|---|---|---|---|
| Vestas (Denmark) | DFIG | 90–120 | 2.0–2.2 |
| PMSG | 105–162 | 3.4–9.5 | |
| Siemens Gamesa (Spain) | SCIG | 154–167 | 6.0–8.0 |
| DFIG | 120–142 | 3.5–4.3 | |
| PMSG | 114–145 | 2.1–4.5 | |
| Gold wind (China) | PMSG | - | 2.0–6.0 |
| GE (USA) | DFIG | 116–158 | 2.0–5.0 |
| PMSG | 150 | 6.0 | |
| Enercon (Germany) | WRSG | 82–138 | 2.0–4.2 |
| Manufacturer | Power Rating (MW) | Rotor Diameter (m) | Drive Train | IEC Class |
|---|---|---|---|---|
| MHI Vestas | 9.5 | 164 | Medium-speed geared | S |
| Siemens Gamesa | 8 | 167 | Direct drive | S (IB) |
| Gold wind | 6.7 | 154 | PM direct drive | I |
| Senvion | 6.15 | 152 | High-speed geared | S |
| GE | 6 | 150 | Direct drive | IB |
| Ming Yang | 6 | 140 | Medium-speed geared | IIB |
| Doosan | 5.5 | 140 | High-speed geared | I |
| Hitachi | 5.2 | 126–136 | Medium-speed geared | S |
| Nbjj | 5 | 151 | High-speed geared | IIB |
| Adwen | 5 | 135 | Low-speed geared | IA |
| Technique | Optimized MSC Controller Gains | GSC Controller Gains | ||
|---|---|---|---|---|
| Gain | Value | Gain | Value | |
| MRFO | Kp1 | 2.8971 | Kp3 | 0.83 |
| Ki1 | 199.7842 | Ki3 | 5 | |
| Kp2 | 2.8971 | Kp4 | 8 | |
| Ki2 | 199.7842 | Ki4 | 400 | |
| - | - | Kp5 | 0.83 | |
| - | - | Ki5 | 5 | |
| Technique | Optimized RSC Controller Gains | GSC Gains | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Voltage Regulator | Torque Regulator | Voltage Regulators | Voltage Regulator | Torque Regulator | Voltage Regulators | |||||||
| MRFO | Kp = 7.9712 | Ki = 0.0319 | Kp = 2.7839 | Ki = 0.0937 | Kp = 0.2981 | Ki = 97.278 | Kp = 3 | Ki = 0.02 | Kp = 8 | Ki = 500 | Kp = 1.2 | Ki = 5 |
| Hardware Protection Device | Price (US$) |
|---|---|
| Classical DVR | 67,229.99 |
| Low-cost DVR | 36,778.79 |
| STATCOM | 200,000.00 |
| Conventional crowbar | 5.00–75.00 |
| Active crowbar | 85.00 |
| Protection Scheme | Rotor Current Limit (pu) | Status of RSC | Limit (pu) | Remarks |
|---|---|---|---|---|
| Crowbar circuit with resistances only | <2.4 | Blocked | <1.25 | Useful for symmetrical faults only |
| Crowbar with DVR | <2.0 | Partly maintained | <1.25 | Useful for all fault types |
| Crowbar with chopper | <2.4 | Blocked | <1.25 | Useful for all fault types |
| Crowbar with R–L | <2.4 | Partly maintained | <1.25 | Useful for all fault types |
| ACB_P | <2.0 | Partly maintained | <1.08 | Useful for all fault types |
| Resistance | 1.5 Ω |
|---|---|
| Rated power | 12 kW |
| Maximum temperature | 150 °C |
| Thermal time constant | 4 min |
| Weight | 30 kg |
| Dimensions | (750.330.150) mm |
| PMSWG Parameters | Value | DFIWG Parameters | Value |
|---|---|---|---|
| Rated power | 1.5 MW | Rated power | 1.5 MW |
| Rated stator voltage | 575 V | Rated stator voltage | 575 V |
| Rated frequency | 60 Hz | Rated frequency | 60 Hz |
| DC-link voltage | 1150 V | DC-link voltage | 1150 V |
| Pole pairs | 40 | Pole pairs | 3 |
| Generator inductance in the d frame | 0.7 pu | Stator resistance | 0.023 pu |
| Generator inductance in the q frame | 0.7 pu | Rotor leakage inductance | 0.16 pu |
| Generator stator resistance | 0.01 pu | Mutual inductance | 2.9 pu |
| A flux of the permanent magnets | 0.9 pu | Stator leakage inductance | 0.18 pu |
| Line inductance | 0.3 pu | Rotor resistance | 0.016 pu |
| Line resistance | 0.003 pu | Inertia constant | 0.685 pu |
| Studied Cases | Parameters | |
|---|---|---|
| DFIWG | PMSWG | |
| Wind speed scenario | change (0.2 0.48) ripple (±14 V) change (8.7 12.9) P change (0.3 0.97) change (0.3 0.8) change (1.03 1.24) | change (0.18 0.44) ripple (±9 V) change (7 16) P change (0.27 1.03) change (0.28 0.93) change (0.72 1.19) |
| Voltage dip scenario | Overvoltage at 1.0783 pu P change ≈ (0.17 1.28) change ≈ (−0.53 1.63) change ≈ (1.15 1.22) Q change ≈ (−0.54 0.61) I change (−2.27 2.27) | Overvoltage at 1.0584 pu P change ≈ (0.64 0.965) change ≈ (0.889 0.894) change ≈ (1.087 1.095) Q change ≈ (−0.001 0.005) I change (−1.2 1.2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmoud, M.M.; Atia, B.S.; Abdelaziz, A.Y.; Aldin, N.A.N. Dynamic Performance Assessment of PMSG and DFIG-Based WECS with the Support of Manta Ray Foraging Optimizer Considering MPPT, Pitch Control, and FRT Capability Issues. Processes 2022, 10, 2723. https://doi.org/10.3390/pr10122723
Mahmoud MM, Atia BS, Abdelaziz AY, Aldin NAN. Dynamic Performance Assessment of PMSG and DFIG-Based WECS with the Support of Manta Ray Foraging Optimizer Considering MPPT, Pitch Control, and FRT Capability Issues. Processes. 2022; 10(12):2723. https://doi.org/10.3390/pr10122723
Chicago/Turabian StyleMahmoud, Mohamed Metwally, Basiony Shehata Atia, Almoataz Y. Abdelaziz, and Noura A. Nour Aldin. 2022. "Dynamic Performance Assessment of PMSG and DFIG-Based WECS with the Support of Manta Ray Foraging Optimizer Considering MPPT, Pitch Control, and FRT Capability Issues" Processes 10, no. 12: 2723. https://doi.org/10.3390/pr10122723
APA StyleMahmoud, M. M., Atia, B. S., Abdelaziz, A. Y., & Aldin, N. A. N. (2022). Dynamic Performance Assessment of PMSG and DFIG-Based WECS with the Support of Manta Ray Foraging Optimizer Considering MPPT, Pitch Control, and FRT Capability Issues. Processes, 10(12), 2723. https://doi.org/10.3390/pr10122723