
Adaptive Leader-Following Consensus Tracking Control of Multiple UAVs Subject to Deception Attacks

Abstract
:1. Introduction
2. Problem Formulation
2.1. Graph Theory
2.2. System Description
2.3. Deception Attack Model
2.4. Adaptive Event-Triggered Communication Scheme
3. Main Results
| Algorithm 1: Adaptive event-triggered control algorithm. |
REQUIRE Given values of the triggering parameters in (12) and . ENSURE for
do Step 2: The sensors of UAV group sample data . Step 3: if triggering condition holds, go to Step 4; otherwise, go to Step 5. Step 4: Drop the current data; Controller holds the last event-triggered instant (ETI) ; Go to Step 3. Step 5: use a buffer to stack the released data and update the ZOH. compute , update the ZOH. end if Step 6: Update the state at ETI. Step 7: Compute the consensus control with (15). Step 8: Go to Step 2. end for |
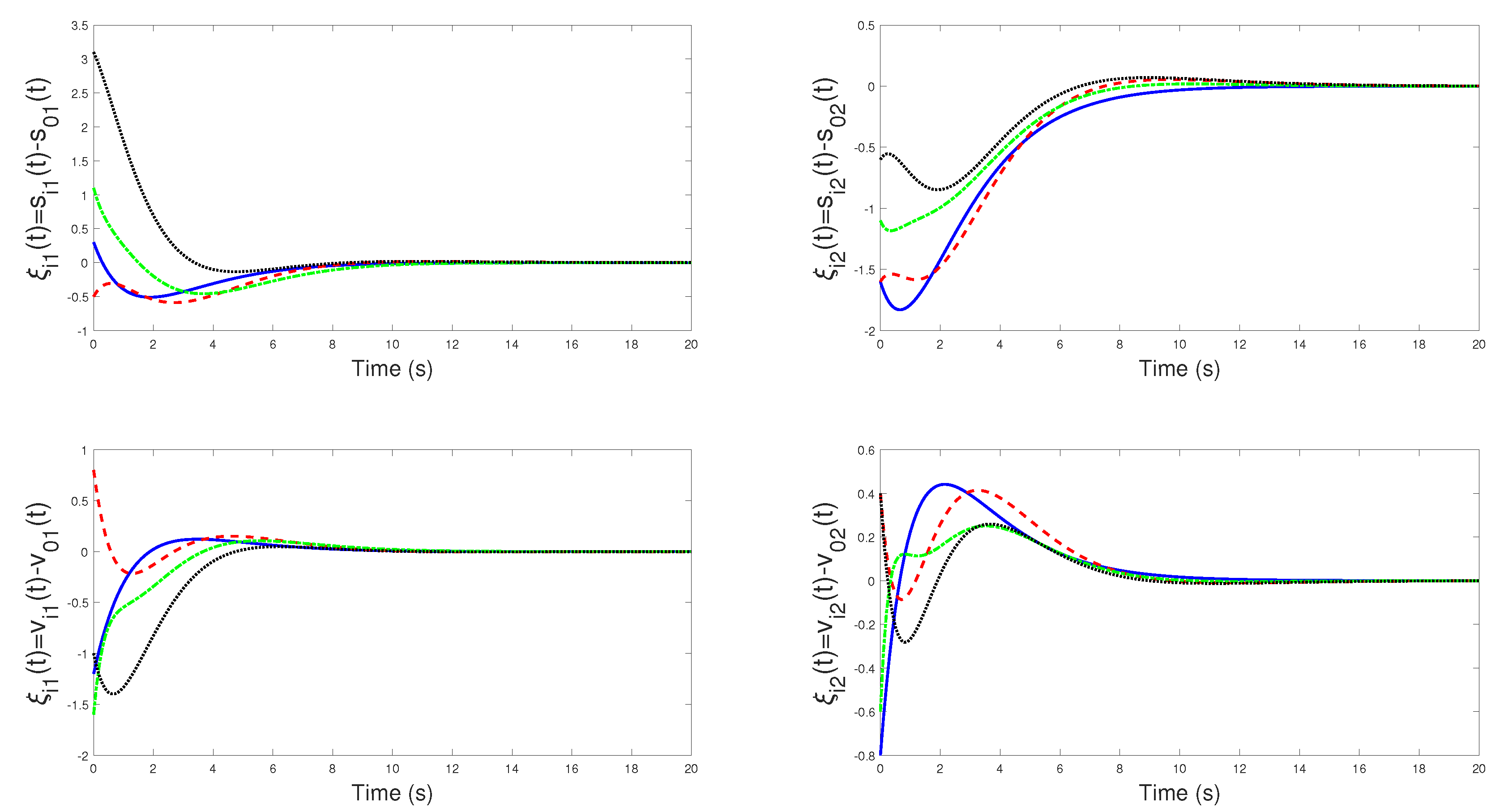
4. An Illustrative Example
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Zhang, X.; Xin, B.; Fang, H. Coordination between unmanned aerial and ground vehicles: A taxonomy and optimization perspective. IEEE Trans. Cybern. 2016, 46, 959–972. [Google Scholar] [CrossRef] [PubMed]
- Ding, D.; Han, Q.-L.; Xiang, Y.; Ge, X.; Zhang, X.-M. A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing 2018, 275, 1674–1683. [Google Scholar] [CrossRef]
- Caillouet, C.; Mitton, N. Optimization and communication in uav networks. Sensors 2020, 20, 5036. [Google Scholar] [CrossRef] [PubMed]
- Cai, X.; Queiroz, M.D. Adaptive rigidity-based formation control for multirobotic vehicles with dynamics. IEEE Trans. Control Syst. Technol. 2015, 23, 389–396. [Google Scholar] [CrossRef]
- Zou, W.; Xiang, Z.; Ki, A.C. Mean square leader-following consensus of second-order nonlinear multi-agent systems with noises and unmodeled dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2478–2486. [Google Scholar] [CrossRef]
- Wang, B. Cluster event-triggered tracking cooperative and formation control for multivehicle systems: An extended magnification region condition. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3229–3239. [Google Scholar] [CrossRef]
- Zhang, A.; Zhang, J.; Yang, L. Distributed event-triggered adaptive coordinated trajectory tracking control of multi-usvs based on the aggregate tracking error. IEEE Access. 2021, 9, 26802–26810. [Google Scholar] [CrossRef]
- Xie, J.; Peng, X.; Wang, H.; Niu, W.; Zheng, X. Uav autonomous tracking and landing based on deep reinforcement learning strategy. Sensors 2020, 20, 5630. [Google Scholar] [CrossRef]
- Zou, W.; Zhou, C.; Guo, J.; Xiang, Z. Global adaptive leader-following consensus for second-order nonlinear multiagent systems with switching topologies. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 702–706. [Google Scholar] [CrossRef]
- Chen, B.S.; Wang, C.P.; Lee, M.Y. Stochastic robust team tracking control of multi-uav networked system under wiener and poisson random fluctuations. IEEE Trans. Cybern. 2020, 51, 5786–5799. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhsng, P. Multi-uav formation control based on a novel back-stepping approach. IEEE Trans. Veh. Technol. 2020, 69, 2437–2448. [Google Scholar] [CrossRef]
- Zou, W.; Qian, K.; Xiang, Z. Fixed-time consensus for a class of heterogeneous nonlinear multiagent systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1279–1283. [Google Scholar] [CrossRef]
- Xie, D.; Xu, S.; Chu, Y.; Zou, Y. Event-triggered average consensus for multi-agent systems with nonlinear dynamics and switching topology. J. Franklin Inst. 2015, 352, 1080–1098. [Google Scholar] [CrossRef]
- Yan, S.; Gu, Z.; Park, J.H. Memory-event-triggered H ∞ load frequency control of multi-area power systems with cyber-attacks and communication delays. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1571–1583. [Google Scholar] [CrossRef]
- Hu, S.; Yue, D.; Yin, X.; Xie, X.; Ma, Y. Adaptive event-triggered control for nonlinear discrete-time systems. Int. J. Robust Nonlinear Control. 2016, 26, 4101–4125. [Google Scholar] [CrossRef]
- Yan, S.; Shen, M.Q.; Nguang, S.K.; Zhang, G.M. Event-triggered H ∞ control of networked control systems with distributed transmission delay. IEEE Trans. Autom. Control. 2020, 65, 4295–4301. [Google Scholar] [CrossRef]
- Gu, Z.; Yue, D.; Park, J.H.; Xie, X. Memory-event-triggered fault detection of networked IT2 T-S fuzzy systems. IEEE Trans. Cybern. 2022. [Google Scholar] [CrossRef] [PubMed]
- Zou, W.; Shi, P.; Xiang, Z.; Shi, Y. Consensus tracking control of switched stochastic nonlinear multiagent systems via event-triggered strategy. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1036–1045. [Google Scholar] [CrossRef]
- Yan, S.; Gu, Z.; Nguang, S.K. Memory-event-triggered H ∞ output control of neural networks with mixed delays. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Yang, P.; Zhang, A.; Zhou, D. Event-triggered finite-time formation control for multiple unmanned aerial vehicles with input saturation. Int. J. Control Autom. Syst. 2021, 19, 1760–1773. [Google Scholar] [CrossRef]
- Wei, L.; Chen, M.; Li, T. Dynamic event-triggered cooperative formation control for UAVs subject to time-varying disturbances. IET Control Theory Appl. 2020, 14, 2514–2525. [Google Scholar] [CrossRef]
- Gu, Z.; Yue, D.; Tian, E. On designing of an adaptive event-triggered communication scheme for nonlinear networked interconnected control systems. Inf. Sci. 2018, 422, 257–270. [Google Scholar] [CrossRef]
- Li, X.; Sun, Z.; Tang, Y.; Karimi, H.R. Adaptive event-triggered consensus of multi-agent systems on directed graphs. IEEE Trans. Autom. Control. 2021, 66, 1670–1685. [Google Scholar] [CrossRef]
- Wei, A.; Hu, X.; Wang, Y. Consensus of linear multi-agent systems subject to actuator saturation. Int. J. Control Autom. Syst. 2013, 11, 649–656. [Google Scholar] [CrossRef]
- Guan, W.; Bian, T.; Zhao, Z. Fault-tolerant control of multi-agent systems with saturation and L2-disturbances. IEEE Access. 2020, 8, 556–564. [Google Scholar] [CrossRef]
- Xie, Y.; Lin, Z. Global consensus of multi-agent systems with intermittent directed communication in the presence of actuator saturation. Int. J. Robust Nonlinear Control. 2020, 30, 8469–8484. [Google Scholar] [CrossRef]
- You, X.; Hua, C.; Peng, D.; Guan, X. Leader–following consensus for multi-agent systems subject to actuator saturation with switching topologies and time-varying delays. IET Control Theory Appl. 2016, 10, 144–150. [Google Scholar] [CrossRef]
- Chu, H.; Chen, J.; Wei, Q.; Zhang, W. Robust global consensus tracking of linear multi-agent systems with input saturation via scheduled low-and-high gain feedback. IET Control Theory Appl. 2019, 13, 69–77. [Google Scholar] [CrossRef]
- Yang, Y.; Yue, D.; Xue, Y. Decentralized adaptive neural output feedback control of a class of large-scale time-delay systems with input saturation. J. Franklin Inst. 2015, 352, 2129–2151. [Google Scholar] [CrossRef]
- Wei, X.; Yang, J.; Fan, X. Distributed guidance law design for multi-UAV multi-direction attack based on reducing surrounding area. Aerosp. Sci. Technol. 2020, 99, 105571. [Google Scholar] [CrossRef]
- Basan, E.; Basan, A.; Nekrasov, A.; Fidge, C.; Gamec, J.; Gamcová, M. A self-diagnosis method for detecting uav cyber attacks based on analysis of parameter changes. Sensors 2021, 21, 509. [Google Scholar] [CrossRef] [PubMed]
- Ai, X.; Wang, L.; Yu, J.; Shen, Y. Field-of-view constrained two-stage guidance law design for three-dimensional salvo attack of multiple missiles via an optimal control approach. Aerosp. Sci. Technol. 2019, 85, 334–346. [Google Scholar] [CrossRef]
- Gu, Z.; Ahn, C.K.; Yue, D.; Xie, X. Event-triggered H∞ filtering for T–S fuzzy-model-based nonlinear networked systems with multi-sensors against DoS attacks. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Yoon, J.; Jang, M.-S.; Park, K.-J. A robot operating system framework for secure uav communications. Sensors 2021, 21, 1369. [Google Scholar] [CrossRef] [PubMed]
- Aldosari, W.; Moinuddin, M.; Aljohani, A.J.; Al-Saggaf, U.M. Distributed extended kalman filtering based techniques for 3-d uav jamming localization. Sensors 2020, 20, 6405. [Google Scholar] [CrossRef] [PubMed]
- Gu, Z.; Sun, X.; Lam, H.; Yue, D.; Xie, X. Event-based secure control of T-S fuzzy based 5-DOF active semi-vehicle suspension systems subject to DoS attacks. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, D.; Shi, P.; Zhang, W.; Qian, F. Event-based formation control for nonlinear multiagent systems under dos attacks. IEEE Trans. Autom. Control. 2021, 66, 452–459. [Google Scholar] [CrossRef]
- Zhang, J.; Song, J.; Li, J.; Han, F.; Zhang, H. Observer-based non-fragile H∞-consensus control for multi-agent systems under deception attacks. Int. J. Syst. Sci. 2021, 52, 1223–1236. [Google Scholar] [CrossRef]
- He, W.; Gao, X.; Zhong, W.; Qian, F. Secure impulsive synchronization control of multi-agent systems under deception attacks. Inf. Sci. 2018, 459, 354–368. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, L.; Feng, G. Consensus of heterogeneous linear multiagent systems subject to aperiodic sampled-data and dos attack. IEEE Trans. Cybern. 2019, 49, 1501–1511. [Google Scholar] [CrossRef]
- Peng, C.; Han, Q.-L.; Yue, D. Communication-delay-distribution-dependent decentralized control for large-scale systems with IP-based communication networks. IEEE Trans. Control Syst. Technol. 2013, 21, 820–830. [Google Scholar] [CrossRef]
- Ding, L.; Zheng, W.X. Network-based practical consensus of heterogeneous nonlinear multiagent systems. IEEE Trans. Cybern. 2017, 47, 1841–1851. [Google Scholar] [CrossRef] [PubMed]
- Gu, Z.; Shi, P.; Yue, D. An adaptive event-triggering scheme for networked interconnected control system with stochastic uncertainty. Int. J. Robust Nonlinear Control. 2017, 27, 236–251. [Google Scholar] [CrossRef]
- Hu, S.; Zhang, Y.; Du, Z. Network-based H∞ tracking control with event-triggering sampling scheme. IET Control Theory Appl. 2012, 6, 533–544. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| UAV | Conventional ETS | Our Method | ||
|---|---|---|---|---|
| NPR | NDR | NPR | NDR | |
| 1 | 29 | 11.6% | 20 | 8% |
| 2 | 31 | 12.4% | 25 | 10% |
| 3 | 23 | 9.2% | 21 | 8.4% |
| 4 | 23 | 9.2% | 20 | 8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, X.; Yan, S. Adaptive Leader-Following Consensus Tracking Control of Multiple UAVs Subject to Deception Attacks. Processes 2022, 10, 757. https://doi.org/10.3390/pr10040757
Mu X, Yan S. Adaptive Leader-Following Consensus Tracking Control of Multiple UAVs Subject to Deception Attacks. Processes. 2022; 10(4):757. https://doi.org/10.3390/pr10040757
Chicago/Turabian StyleMu, Xiufeng, and Shen Yan. 2022. "Adaptive Leader-Following Consensus Tracking Control of Multiple UAVs Subject to Deception Attacks" Processes 10, no. 4: 757. https://doi.org/10.3390/pr10040757