
Development of Artificial Neural Networks to Predict the Effect of Tractor Speed on Soil Compaction Using Penetrologger Test Results

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Determination of land cover [35].
- Modelling the dying kinetics of sesame seeds and proving that this technique was superior to traditional statistical modelling [36].
- Modelling soil properties in a better way than by using multivariate regression analysis [37].
- Predicting sugar diffusion capacity depending on the date-fruit variety, temperature, and spreading period.
- Predicting organic potato yield using tillage systems and soil properties as variables [5].
- Assess the impacts of tractor forward speed on the penetration resistance (PR) offered by the soil and the bulk density of the soil under different moisture level conditions.
- Evaluate the potential/capability of ANN to predict the degree of soil compaction from various sets of input data variables.
2. Materials and Methods
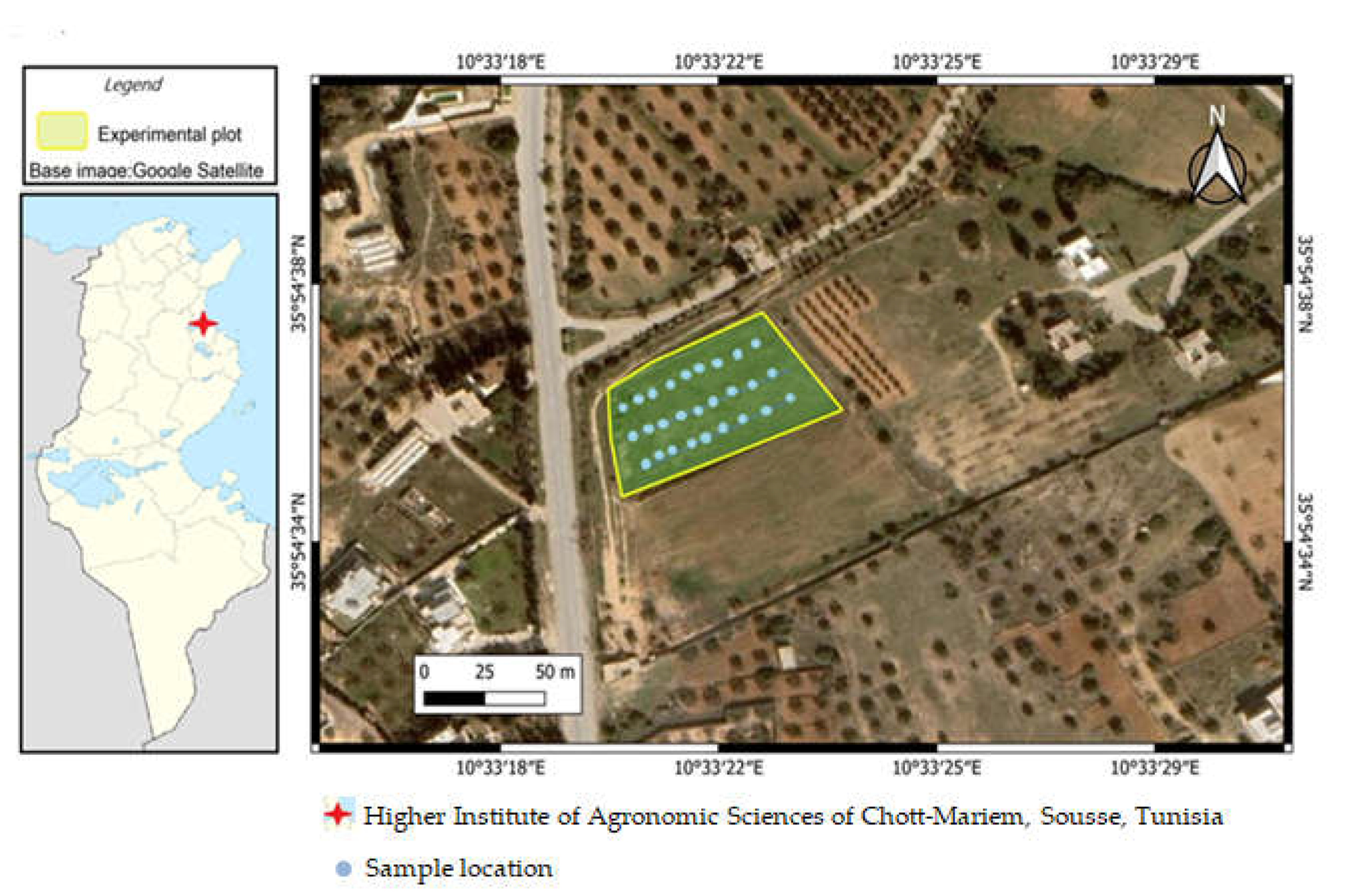
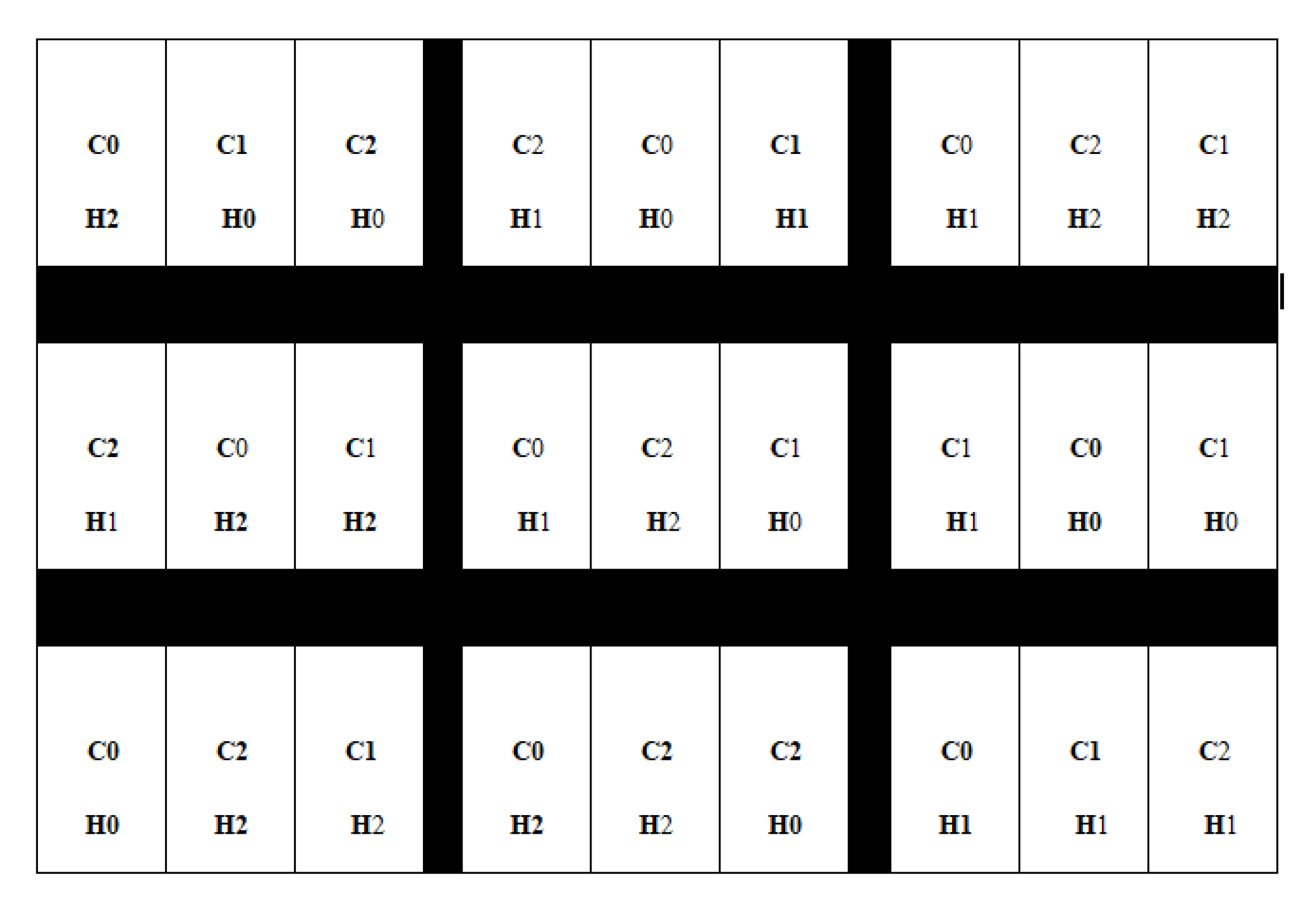
2.1. Experimental Site and Conditions
- Sand particles (2000–50 μm), 480 g/kg of soil;
- Silt (50–2 μm), 300 g/kg of soil;
- Clay (less than 2 μm), 210 g/kg of soil.
2.2. Soil Sampling and Analysis
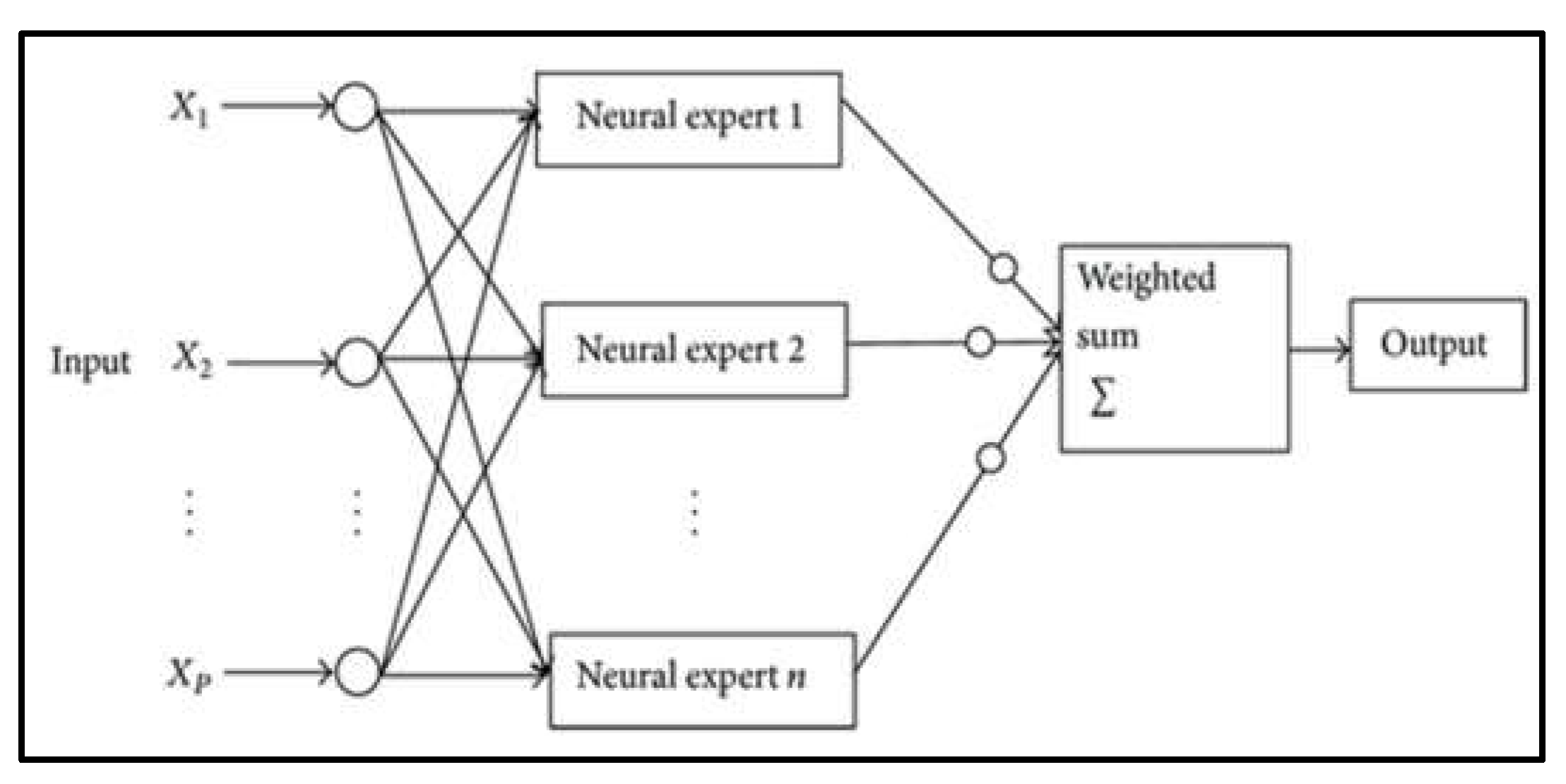
2.3. Developing the ANN Model
2.4. Selection of Relevant Model Inputs/Outputs
- (1)
- Tractor speed (km/h);
- (2)
- Average depth below the ground surface, D (cm);
- (3)
- Soil bulk density (g/cm3);
- (4)
- Soil moisture content (%).
2.5. Data Division and Pre-Processing
2.6. Determination of Network Architecture
2.7. Model Optimization and Stopping Criterion
2.8. Model Validation and Performances Measures
2.9. Global Sensitivity Analysis
3. Results and Discussion
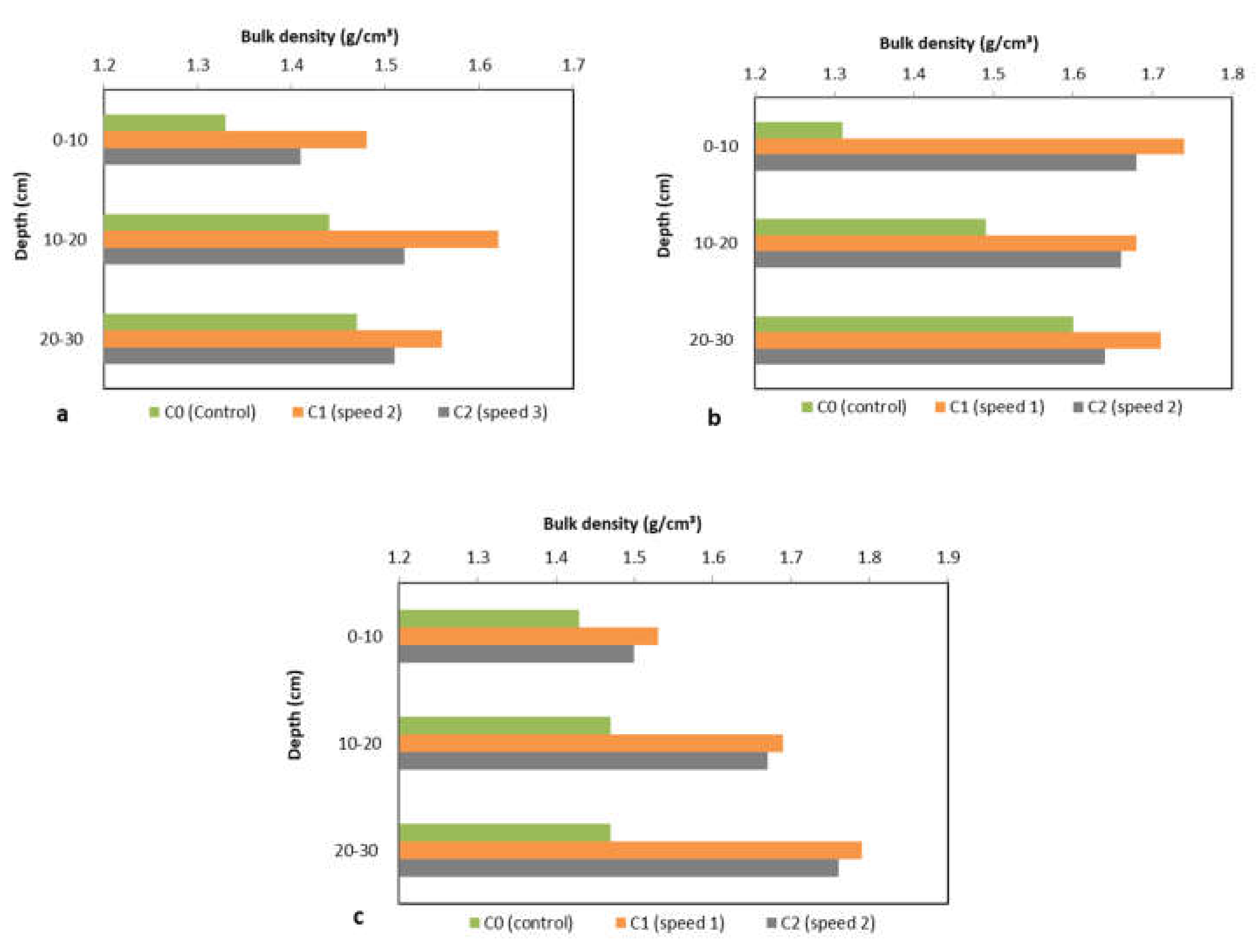
3.1. Bulk Density
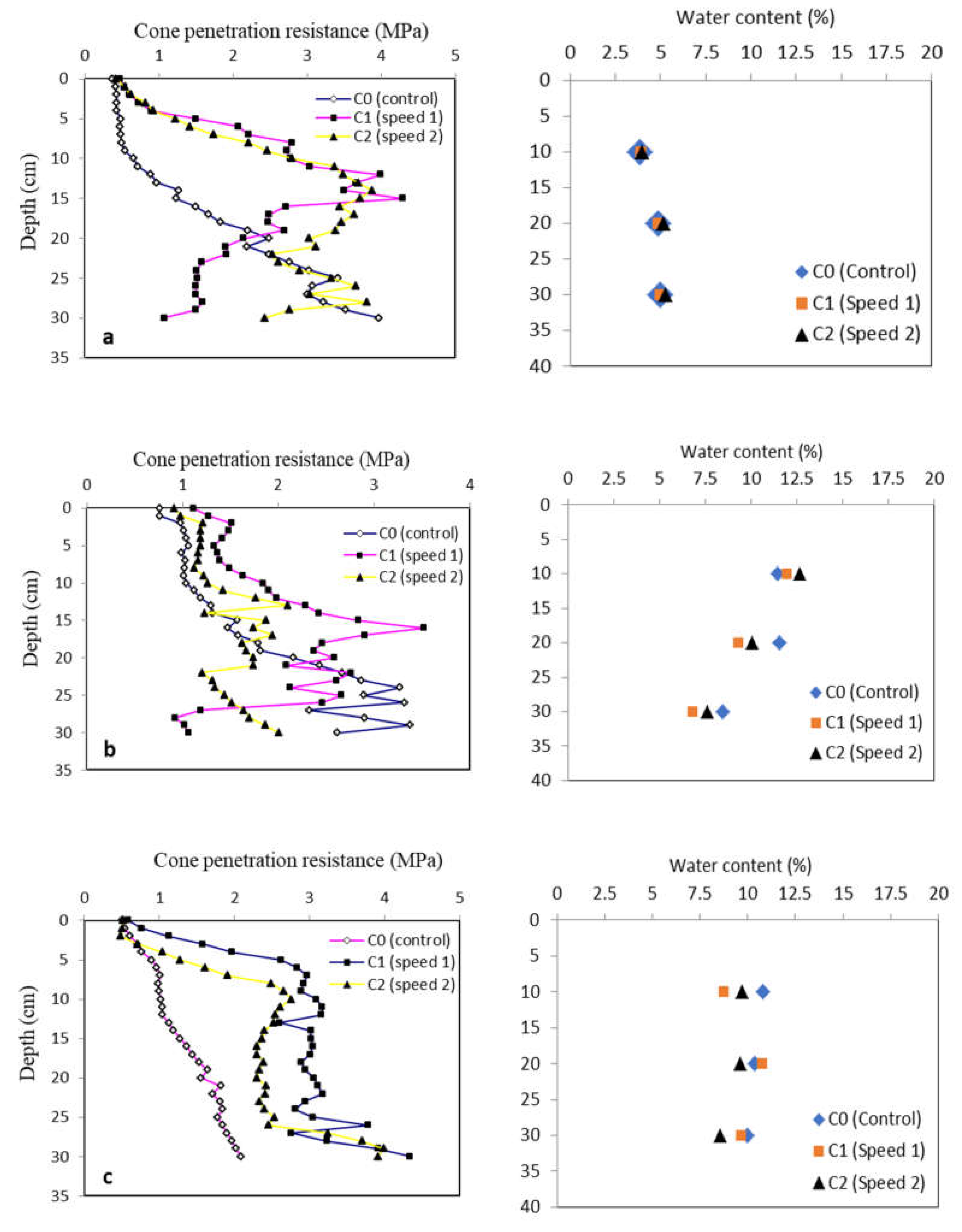
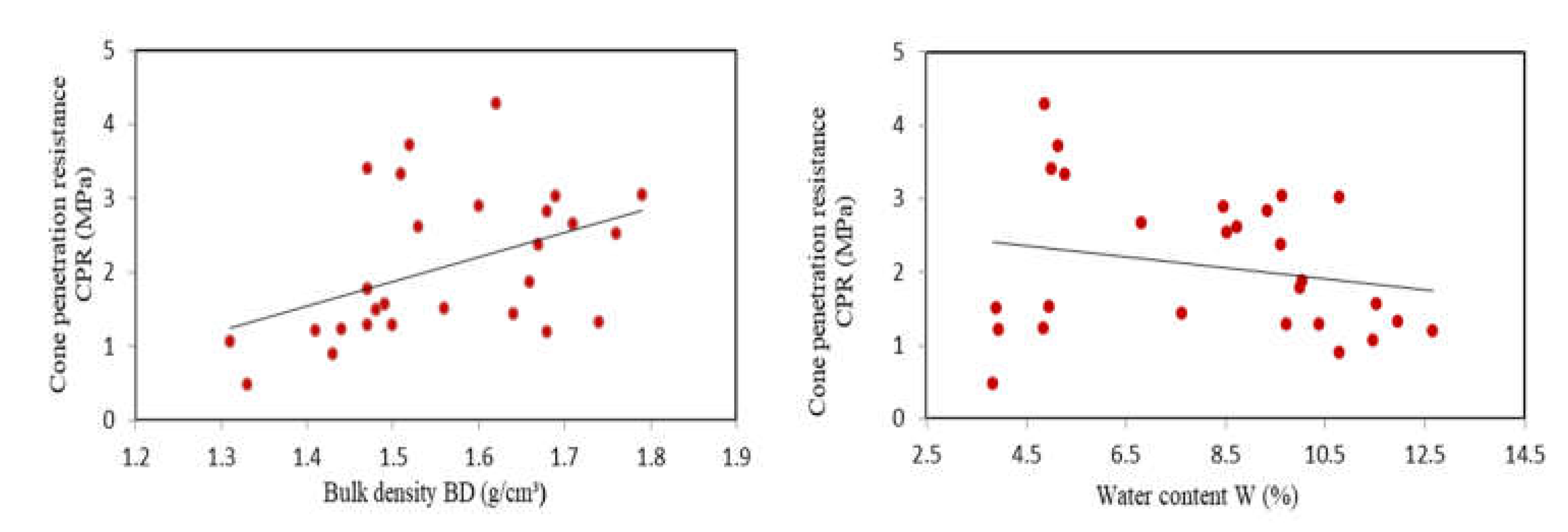
3.2. Cone Resistance to Penetration
3.3. Prediction of Penetration Resistance PR
3.3.1. Descriptive Statistics
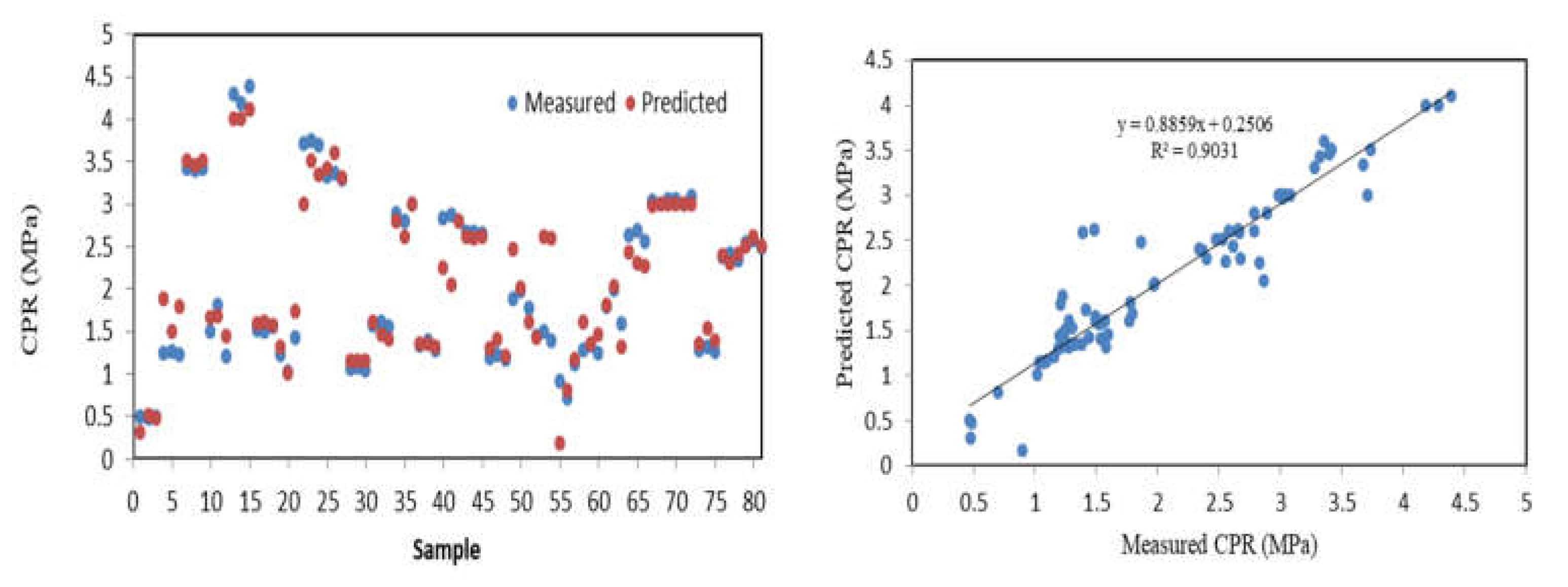
3.3.2. Results of the Optimal ANN Model
3.3.3. MLP-Based Numerical Equation
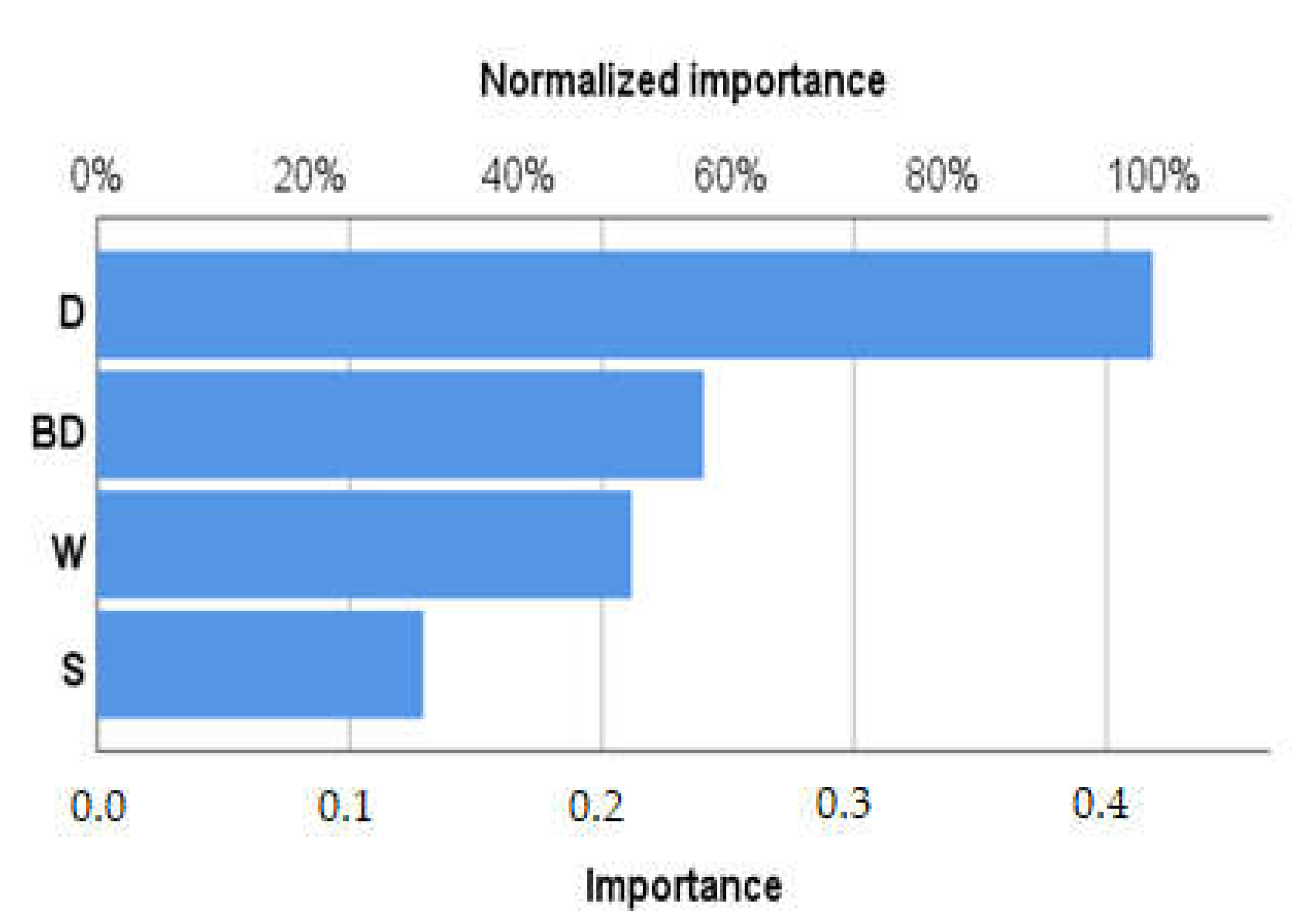
3.3.4. Selection of Significant Input Parameters
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ranasinghe, R.; Jaksa, M.; Kuo, Y.; Nejad, F.P. Application of artificial neural networks for predicting the impact of rolling dynamic compaction using dynamic cone penetrometer test results. J. Rock Mech. Geotech. Eng. 2017, 9, 340–349. [Google Scholar] [CrossRef] [Green Version]
- Guengant, J.P.; May, J. Africa 2050: African Demography; Emerging Markets Forum: Washington, DC, USA, 2013; p. 60. [Google Scholar]
- Jaksa, M.B.; Scott, B.T.; Mentha, N.L.; Symons, A.T.; Pointon, S.M.; Wrightson, P.T.; Syamsuddin, E. Quantifying the zone of influence of the impact roller. In Proceedings of the ISSMGETC International Symposium on Ground Improvement, Brussels, Belgium, 31 May–1 June 2012. [Google Scholar]
- Oldeman, L.R. Global Extent of Soil Degradation; Bi-Annual Report; ISRIC: Wageningen, The Netherlands, 1991–1992; pp. 19–36. [Google Scholar]
- Abrougui, K.; Gabsi, K.; Mercatoris, B.; Khemis, C.; Amami, R.; Chehaibi, S. Prediction of organic potato yield using tillage systems and soil properties by artificial neural network (ANN) and multiple linear regressions (MLR). Soil Tillage Res. 2019, 190, 202–208. [Google Scholar] [CrossRef]
- Lull, H.W. Soil Compaction on Forest and Range Lands; Forest Service, US Department of Agriculture: Washington, DC, USA, 1959.
- Soane, B.; van Ouwerkerk, C. Implications of soil compaction in crop production for the quality of the environment. Soil Tillage Res. 1995, 35, 5–22. [Google Scholar] [CrossRef]
- Alakukku, L.; Peter Weisskopf, W.C.T.; Chamen, F.G.J.; Tijink, J.P.; van der Linden, S.; Pires, C.; Sommer, G. Prevention strategies for field traffic-induced subsoil compaction: A review: Part 1. Machine/soil interactions. Soil Tillage Res. 2003, 73, 145–160. [Google Scholar] [CrossRef]
- Alaoui, A.; Lipiec, J.; Gerke, H. A review of the changes in the soil pore system due to soil deformation: A hydrodynamic perspective. Soil Tillage Res. 2011, 115–116, 1–15. [Google Scholar] [CrossRef]
- Nawaz, M.F.; Bourrié, G.; Trolard, F. Soil compaction impact and modelling. A review. Agron. Sustain. Dev. 2012, 33, 291–309. [Google Scholar] [CrossRef] [Green Version]
- Charreau, C.J. Problems posed by agricultural use of tropical soils by annual crops. Tropical Agronomy. Series 2, General Agronomy. Technical Studies. 27, 905–929. Conference on Soil Fertility, Ibadan, Nigeria. 1972. Available online: https://agritrop.cirad.fr/435651/ (accessed on 9 May 2022).
- Kayombo, B.; Lal, R. Responses of Tropical Crops to Soil Compaction; Elsevier: Amsterdam, The Netherlands, 1994; pp. 287–316. [Google Scholar] [CrossRef]
- Jabro, J.D.; Iversen, W.M.; Evans, R.G.; Allen, B.L.; Stevens, W.B. Repeated Freeze-Thaw Cycle Effects on Soil Compaction in a Clay Loam in Northeastern Montana. Soil Sci. Soc. Am. J. 2014, 78, 737–744. [Google Scholar] [CrossRef]
- Cohron, G. Forces Causing Soil Compaction; Compaction of Agricultural Soils; FAO, AGRIS: Rome, Italy, 1971; pp. 106–122. [Google Scholar]
- Greene, W.D.; Stuart, W.B. Skidder and Tire Size Effects on Soil Compaction. South. J. Appl. For. 1985, 9, 154–157. [Google Scholar] [CrossRef]
- Schjønning, P.; van den Akker, J.; Keller, T.; Greve, M.; Lamandé, M.; Simojoki, A.; Stettler, M.; Arvidsson, J.; Breuning-Madsen, H. Driver-pressure-state-impact-response (DPSIR) analysis and risk assessment for soil compaction-a European perspective. Adv. Agron. 2015, 133, 183–237. [Google Scholar]
- Ren, L.; D’Hose, T.; Ruysschaert, G.; de Pue, J.; Meftah, R.; Cnudde, V.; Cornelis, W.M. Effects of soil wetness and tyre pressure on soil physical quality and maize growth by a slurry spreader system. Soil Tillage Res. 2019, 195, 104344. [Google Scholar] [CrossRef]
- Horn, R.; Domżżał, H.; Słowińska-Jurkiewicz, A.; van Ouwerkerk, C. Soil compaction processes and their effects on the structure of arable soils and the environment. Soil Tillage Res. 1995, 35, 23–36. [Google Scholar] [CrossRef]
- Destain, M.F. La Compaction des Sols Agricoles en Wallonie, SPW; Université de Liège, Gembloux Agro-Bio Tech: Liege, Belgium, 2014; p. 54. [Google Scholar]
- Chamen, T.; Alakukku, L.; Pires, S.; Sommer, C.; Spoor, G.; Tijink, F.; Weisskopf, P. Prevention strategies for field traffic-induced subsoil compaction: A review: Part 2. Equipment and field practices. Soil Tillage Res. 2003, 73, 161–174. [Google Scholar] [CrossRef]
- Hamza, M.A.; Anderson, W.K. Soil compaction in cropping systems: A review of the nature, causes and possible solutions. Soil Tillage Res. 2005, 82, 121–145. [Google Scholar] [CrossRef]
- Arvidsson, J.; Keller, T. Soil stress as affected by wheel load and tyre inflation pressure. Soil Tillage Res. 2007, 96, 284–291. [Google Scholar] [CrossRef]
- Sakai, H.; Nordfjell, T.; Suadicani, K.; Talbot, B.; Bollehuus, E. Soil compaction on forest soils from different kinds of tires and tracks and possibility of accurate estimate. Croat. J. For. Eng. 2008, 29, 15–27. [Google Scholar]
- Barbosa, L.A.; Magalhães, P.S. Tire tread pattern design trigger on the stress distribution over rigid surfaces and soil compaction. J. Terramech. 2015, 58, 27–38. [Google Scholar] [CrossRef]
- Khemis, C.; Abrougui, K.; Lidong, R.; Mutuku, E.A.; Chehaibi, S.; Cornelis, W. Effects of tractor loads and tyre pressures on soil compaction in Tunisia under different moisture conditions. In Proceedings of the 19th EGU General Assembly, EGU2017. Vienna, Austria, 23–28 April 2017; p. 15218. [Google Scholar]
- Khodaei, M. Evaluation of corn planter under travel speed, working depth, pressure wheel and cone index. Agric. Eng. Int. CIGR J. 2015, 17, 73–80. [Google Scholar]
- Horn, R.; Albrechts, C. Stress strain effects in structured unsaturated soils on coupled mechanical and hydraulic processes. In Proceedings of the 18th World Congress of Soil Science, Philadelphia, PA, USA, 9–15 July 2003. [Google Scholar]
- Hamza, M.A.; Al-Adawi, S.; Al-Hinai, K.A. Effect of combined soil water and external load on soil compaction. Soil Res. 2011, 49, 135–142. [Google Scholar] [CrossRef]
- Destain, M.-F.; Roisin, C.; Dalcq, A.-S.; Mercatoris, B. Effect of wheel traffic on the physical properties of a Luvisol. Geoderma 2016, 262, 276–284. [Google Scholar] [CrossRef]
- Günaydın, O. Estimation of soil compaction parameters by using statistical analyses and artificial neural networks. Environ. Earth Sci. 2008, 57, 203–215. [Google Scholar] [CrossRef]
- Isik, F.; Ozden, G. Estimating compaction parameters of fine- and coarse-grained soils by means of artificial neural networks. Environ. Earth Sci. 2012, 69, 2287–2297. [Google Scholar] [CrossRef]
- Shahin, M.A.; Jaksa, M.B. Pullout capacity of small ground anchors by direct cone penetration test methods and neural networks. Can. Geotech. J. 2006, 43, 626–637. [Google Scholar] [CrossRef] [Green Version]
- Kuo, Y.; Jaksa, M.; Lyamin, A.; Kaggwa, W. ANN-based model for predicting the bearing capacity of strip footing on multi-layered cohesive soil. Comput. Geotech. 2008, 36, 503–516. [Google Scholar] [CrossRef]
- Nejad, F.P.; Jaksa, M.B.; Kakhi, M.; McCabe, B.A. Prediction of pile settlement using artificial neural networks based on standard penetration test data. Comput. Geotech. 2009, 36, 1125–1133. [Google Scholar] [CrossRef] [Green Version]
- Varella, C.; Pinto, F.; Queiroz, D.M.; Sena, D.G. Determinacao da cobertura do solo poranalise de imagensdigitais e redesneurais. Rev. Bras. Eng. Agric. Ambient. 2002, 6, 225–229. (In Portuguese) [Google Scholar] [CrossRef] [Green Version]
- Khazaei, J.; Daneshmandi, S. Modeling of thinlayer drying kinetics of sesame seeds: Mathematical and neural networks modeling. Int. Agrophys. 2007, 21, 335–348. [Google Scholar]
- Sarmadian, F.; Mehrjardi, T.; Akbarzadeh, A. Modeling of some soil properties using artificial neural network and multivariate regression in Gorgan province, north of Iran. Aust. J. Basic Appl. Sci. 2009, 3, 323–329. [Google Scholar]
- Trigui, M.; Gabsi, K.; El Amri, I.; Helal, A.; Barrington, S. Modular feed forward networks to predict sugar diffusivity from date pulp Part, I. Model validation. Int. J. Food Prop. 2011, 14, 356–370. [Google Scholar] [CrossRef]
- Bouwman, L.; Arts, W. Effects of soil compaction on the relationships between nematodes, grass production and soil physical properties. Appl. Soil Ecol. 2000, 14, 213–222. [Google Scholar] [CrossRef]
- Sharifi, A.; Godwin, R.J.; O’Dogherty, M.J.; Dresser, M.L. Evaluating the performance of a soil compaction sensor. Soil Use Manag. 2007, 23, 171–177. [Google Scholar] [CrossRef]
- Keller, T.; Défossez, P.; Weisskopf, P.; Arvidsson, J.; Richard, G. SoilFlex: A model for prediction of soil stresses and soil compaction due to agricultural field traffic including a synthesis of analytical approaches. Soil Tillage Res. 2007, 93, 391–411. [Google Scholar] [CrossRef]
- Shahin, M.A. State-of-the-art review of some artificial intelligence applications in pile foundations. Geosci. Front. 2016, 7, 33–44. [Google Scholar] [CrossRef] [Green Version]
- Onoda, T. Neural network information criterion for the optimal number of hidden units. In Proceedings of the International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 275–280. [Google Scholar]
- Hecht-Nielsen, R. Theory of the backpropagation neural network. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Washington, DC, USA, 6 August 1989; pp. 593–605. [Google Scholar]
- Ripley, B.D. Neural Networks and Related Methods for Classification. J. R. Stat. Soc. Ser. B 1994, 56, 409–437. [Google Scholar] [CrossRef]
- NeuroDimension Inc. Neurosolutions Software; NeuroDimension Inc.: Gainesville, FL, USA, 2006. [Google Scholar]
- Maier, H.R.; Jain, A.; Dandy, G.C.; Sudheer, K. Methods used for the development of neural networks for the prediction of water resource variables in river systems: Current status and future directions. Environ. Model. Softw. 2010, 25, 891–909. [Google Scholar] [CrossRef]
- Kim, M.; Gilley, J.E. Artificial Neural Network estimation of soil erosion and nutrient concentrations in runoff from land application areas. Comput. Electron. Agric. 2008, 64, 268–275. [Google Scholar] [CrossRef] [Green Version]
- Kowalczyk-Juśko, A.; Pochwatka, P.; Zaborowicz, M.; Czekała, W.; Mazurkiewicz, J.; Mazur, A.; Janczak, D.; Marczuk, A.; Dach, J. Energy value estimation of silages for substrate in biogas plants using an artificial neural network. Energy 2020, 202, 117729. [Google Scholar] [CrossRef]
- Erzin, Y.; Rao, B.H.; Patel, A.; Gumaste, S.; Singh, D. Artificial neural network models for predicting electrical resistivity of soils from their thermal resistivity. Int. J. Therm. Sci. 2010, 49, 118–130. [Google Scholar] [CrossRef]
- Cybenko, G. Approximation by superpositions of a sigmoidal function. Math. Control Signals Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Garson, D.G. Interpreting neural network connection weights. AI Expert. 1991, 6, 47–51. [Google Scholar]
- Horn, R.; Rostek, J.J. Subsoil compaction processes-state of knowledge. Adv. Geoecol. 2000, 32, 44–54. [Google Scholar]
- Arman, K. Tractor forward velocity and tire load effects on soil compaction. J. Terramech. 1994, 31, 11–20. [Google Scholar] [CrossRef]
- Ansorge, D.; Godwin, R.J.B.E. The Effect of Tyres and a Rubber Track at High Axle Loads on Soil Compaction Part 2. Multi-Axle Machine Studies; Cranfield University: Cranfield, UK, 2008; pp. 338–347. [Google Scholar]
- Etana, A.; Håkansson, I. Swedish experiments on the persistence of subsoil compaction caused by vehicles with high axle load. Soil Tillage Res. 1994, 29, 167–172. [Google Scholar] [CrossRef]
- Taylor, H.M.; Throckmorton, R.I.; van den Berg, G.E. Compaction of Agricultural Soils; ASAE: St. Joseph, MI, USA, 1971; pp. 292–305. [Google Scholar]
- Servadio, P.; Marsili, A.; Vignozzi, N.; Pellegrini, S.; Pagliai, M. Effects on some soil qualities in central Italy following the passage of four wheel drive tractor fitted with single and dual tires. Soil Tillage Res. 2005, 84, 87–100. [Google Scholar] [CrossRef]
- Abdipour, M.; Younessi-Hmazekhanlu, M.; Ramazani, S.H.R. Artificial neural networks and multiple linear regression as potential methods for modeling seed yield of safflower 496 (Carthamus tinctorius, L.). Ind. Crops Prod. 2019, 127, 185–194. [Google Scholar] [CrossRef]
- Kowalski, P.A.; Kusy, M. Determining significance of input neurons for probabilistic neural network by sensitivity analysis procedure. Comput. Intell. 2017, 34, 895–916. [Google Scholar] [CrossRef]
- Mehmet, A.B.; Ehsan, H.; Mehmet, F.; Seyed, E.; Aghakouchaki, H.; Ercan, I. A Hybrid ANN-GA Model for an Automated Rapid Vulnerability Assessment of Existing RC Buildings. Appl. Sci. 2022, 12, 5138. [Google Scholar]
- Sung-Sik, P.; Peter, O.; Seung-Wook, W.; Dong-Eun, L. A Simple and Sustainable Prediction Method of Liquefaction-Induced Settlement at Pohang Using an Artificial Neural Network. Sustainability 2020, 12, 4001. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Horizons | C0 | C1 | C2 | |
|---|---|---|---|---|
| H0 | 0–10 | 1.33 ± 0.05 a,A | 1.48 ± 0.09 a,A, | 1.41 ± 0.03 a,A |
| 10–20 | 1.44 ± 0.45 a,A | 1.62 ± 0.05 a,B | 1.52 ± 0.007 a,A,B | |
| 20–30 | 1.47 ± 0.08 a,A | 1.56 ± 0.10 a,A | 1.51 ± 0.010 a,A | |
| H1 | 0–10 | 1.31 ± 0.07 a,A | 1.64 ± 0.01 a,B | 1.68 ± 0.03 a,B |
| 10–20 | 1.49 ± 0.09 a,b,A | 1.68 ± 0.14 a,A | 1.66 ± 0.05 a,A | |
| 20–30 | 1.6 ± 0.14 b,A | 1.71 ± 0.18 a,A | 1.64 ± 0.11 a,A | |
| H2 | 0–10 | 1.46 ± 0.04 a,A | 1.53 ± 0.06 a,A | 1.5 ± 0.03 a,A |
| 10–20 | 1.47 ± 0.12 a,A | 1.67 ± 0.06 a,b,A | 1.67 ± 0.03 a,b,A | |
| 20–30 | 1.47 ± 0.06 a,A | 1.79 ± 0.07 b,B | 1.76 ± 0.15 b,B |
| Horizons | C0 | C1 | C2 | |
|---|---|---|---|---|
| H0 | 0–10 | 0.48 ± 0.01 a,A | 1.5 ± 0.3 a,B | 1.22 ± 0.2 a,B |
| 10–20 | 1.23 ± 0.02 b,A | 4.29 ± 0.1 b,C | 3.71 ± 0.03 c,B | |
| 20–30 | 3.41 ± 0.01 c,C | 1.52 ± 0.02 a,A | 3.32 ± 0.04 b,B | |
| H1 | 0–10 | 1.06 ± 0.02 a,A | 1.33 ± 0.05 a,C | 1.19 ± 0.03 a,B |
| 10–20 | 1.57 ± 0.03 b,A | 2.83 ± 0.04 c,C | 1.87 ± 0.1 c,B | |
| 20–30 | 2.89 ± 0.1 c,C | 2.66 ± 0.01 b,B | 1.44 ± 0.05 b,A | |
| H2 | 0–10 | 0.9 ± 0.2 a,A | 2.62 ± 0.06 a,C | 1.28 ± 0.03 a,B |
| 10–20 | 1.28 ± 0.04 a,A | 3.02 ± 0.02 b,C | 2.37 ± 0.03 b,B | |
| 20–30 | 1.78 ± 0.2 b,A | 3.04 ± 0.04 b,C | 2.53 ± 0.05 c,B |
| Model Variable | Minimum | Maximum | Mean | Median | SD | Skewness | Kurtosis |
|---|---|---|---|---|---|---|---|
| BD (g/cm3) | 1.24 | 1.92 | 1.56 | 1.56 | 0.146 | 0.239 | −0.324 |
| W (%) | 3.51 | 13.59 | 8.14 | 9.05 | 3.094 | −0.101 | −1.585 |
| Speed (km/h) | 0.00 | 9.00 | 4.33 | 4.000 | 4.509 | 0.330 | −1.65 |
| Depth (cm) | 10 | 30 | 20 | 20 | 8.215 | 5.691 × 10−15 | −1.518 |
| CPR (MPa) | 0.47 | 4.39 | 2.09 | 1.78 | 0.977 | 0.443 | −0.801 |
| 1. Speed | ||
Input layer Hidden layer Output layer | Co-Variables | 2. Depth |
| 3. Bulk density | ||
| 4. Moisture content | ||
| Number of neurons | 4 | |
| Resizing method for covariates | Adjusted normalized | |
| Number of hidden layer/s | 1 | |
| Number of neurons in hidden layer | 2 | |
| Activation function | Hyperbolic tangent | |
| Dependent variable/s | 1 CPRnce | |
| Number of neuron/s | 1 | |
| Resizing method for dependent scale variables | Standardized | |
| Error function | Sum of squares |
| Model | Activation Function | MSE | % Error | R |
|---|---|---|---|---|
| Single hidden layer model | TANH | 0.056 | 0.484 | 0.95 |
| Two hidden layer model | TANH | 0.047 | 0.406 | 0.96 |
| Hidden Layer Node | Weight from Node i in Input Layer to Node j in Hidden Layer (wji) | Hidden Layer Threshold (ɵj) | |||
| i = 1 | i = 2 | i = 3 | i = 4 | ||
| j = 5 | −0.137 | 0.218 | −0.302 | −0.292 | −0.277 |
| j = 6 | 0.404 | 1.050 | 0.728 | −0.656 | 0.238 |
| Output Layer Node | Weight from Node j in Hidden Layer to Node k in Output (wkj) | Hidden layer Threshold (ɵk) | |||
| j = 5 | j = 6 | ||||
| k = 7 | −0.007 | 0.748 | −0.218 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khemis, C.; Abrougui, K.; Mohammadi, A.; Gabsi, K.; Dorbolo, S.; Mercatoris, B.; Mutuku, E.; Cornelis, W.; Chehaibi, S. Development of Artificial Neural Networks to Predict the Effect of Tractor Speed on Soil Compaction Using Penetrologger Test Results. Processes 2022, 10, 1109. https://doi.org/10.3390/pr10061109
Khemis C, Abrougui K, Mohammadi A, Gabsi K, Dorbolo S, Mercatoris B, Mutuku E, Cornelis W, Chehaibi S. Development of Artificial Neural Networks to Predict the Effect of Tractor Speed on Soil Compaction Using Penetrologger Test Results. Processes. 2022; 10(6):1109. https://doi.org/10.3390/pr10061109
Chicago/Turabian StyleKhemis, Chiheb, Khaoula Abrougui, Ali Mohammadi, Karim Gabsi, Stéphane Dorbolo, Benoît Mercatoris, Eunice Mutuku, Wim Cornelis, and Sayed Chehaibi. 2022. "Development of Artificial Neural Networks to Predict the Effect of Tractor Speed on Soil Compaction Using Penetrologger Test Results" Processes 10, no. 6: 1109. https://doi.org/10.3390/pr10061109