
A Novel Multi-Sensor Data-Driven Approach to Source Term Estimation of Hazardous Gas Leakages in the Chemical Industry

 ,
, 

Abstract
:1. Introduction
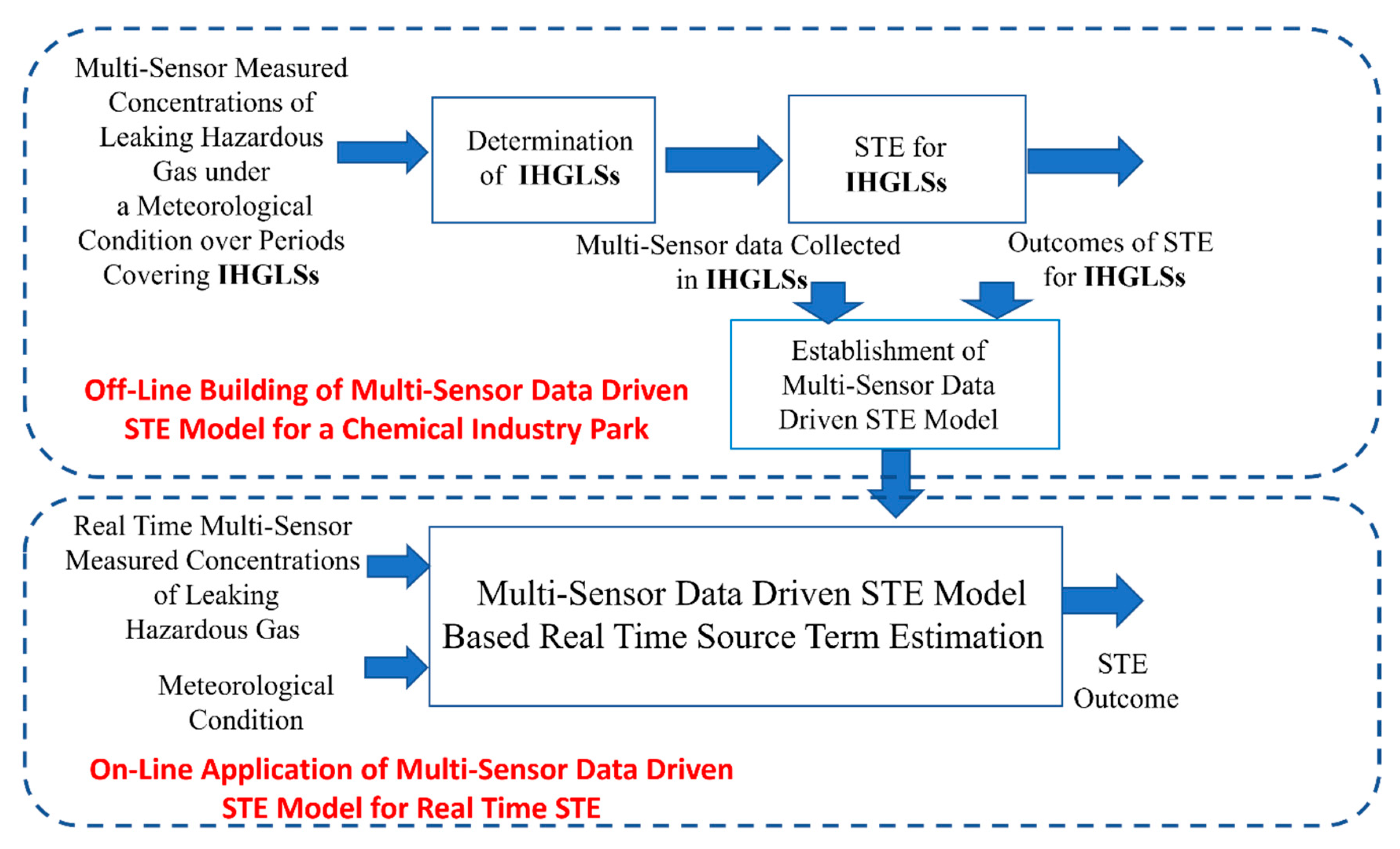
- offline establish a multi-sensor data-driven STE model from historical multi-sensor data measured during a period that covers the situations known as independent hazardous-gas-leakage scenarios (IHGLSs) in a chemical industry park and then
- online apply the established STE model to process field-measured multi-sensor data and determine the leak sources and associated parameters in real-time.
2. Basic Idea and Novelty
- (1)
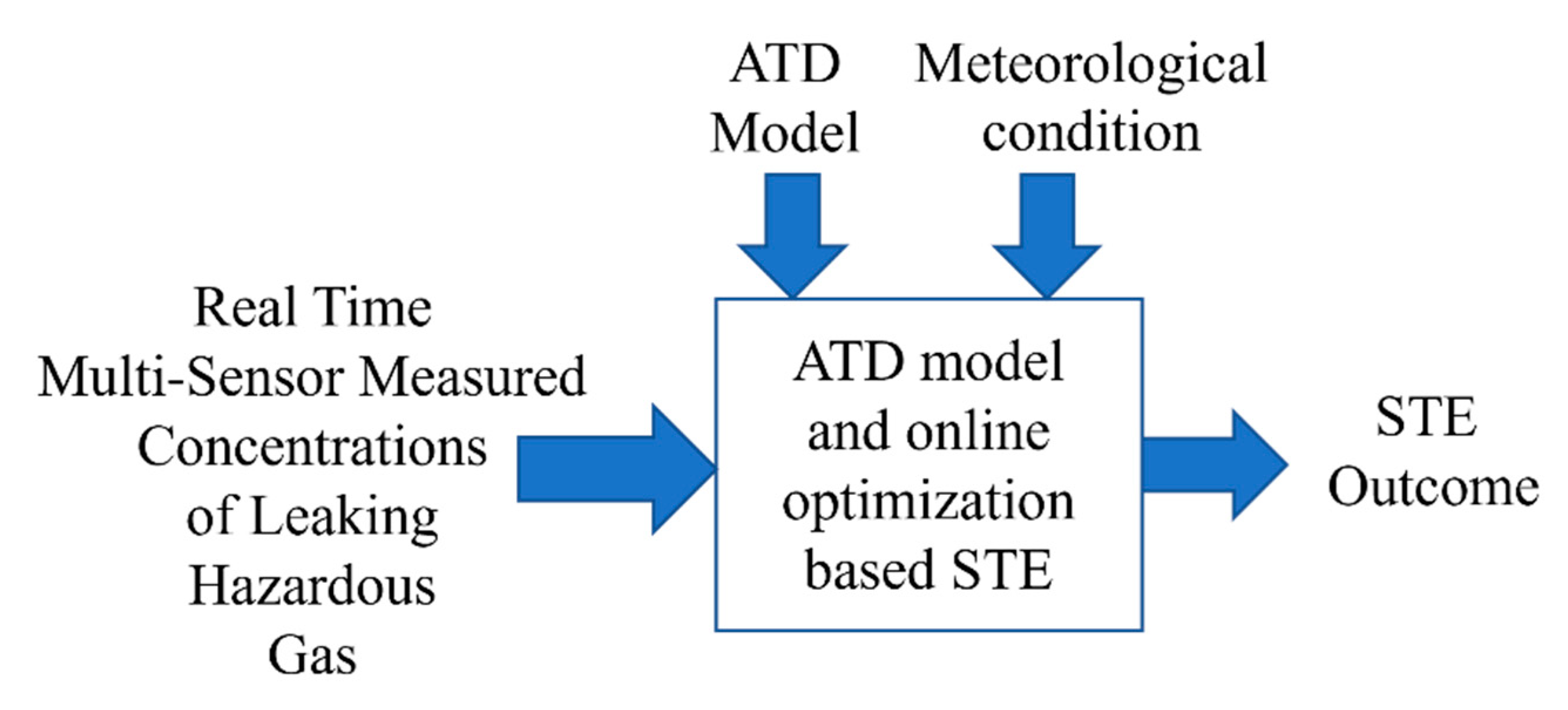
- Building an ATD model that describes the transport and dispersion of hazard gas in the chemical industrial park;
- (2)
- Using the ATD model to generate the concentration data of hazardous gas that would be measured at the N different sensor locations, when hazardous gas leakages take place from different possible sources under a given meteorological condition;
- (3)
- Applying an optimization approach to search for the strengths of hazardous gas leakages in the S possible leaking sources, such that the differences between the concentrations of hazardous gas generated by the ATD model and the practically measured multi-sensor data at the N different sensor locations reach a minimum.
- (a)
- build a multi-sensor data-driven STE model from (1) historical multi-sensor data measured during a period that covers the IHGLSs of concern and (2) the STE outcomes determined offline using an ATD-model-based STE method from the multi-sensor data collected in these IHGLSs
- (b)
- apply the STE model to online-measured multi-sensor data in the chemical industry park to perform STE in real time.
- there exist only two hazardous-gas-leakage scenarios that are linearly independent, so there are two IHGLSs;
- the multi-sensor data collected in the two IHGLSs can be used to represent multi-sensor data collected in any other leakage scenario.
- (i)
- determining the number of IHGLSs from the historical multi-sensor data measured during a period of time that covers the IHGLSs of concern;
- (ii)
- finding the multi-sensor data collected from each of these IHGLSs;
- (iii)
- determining the STE result for each of the IHGLSs; and finally
- (iv)
- building the STE model using the results of (i)–(iii) and applying the model online to perform STE in real time.
3. Problem Definition and Relationships between Multi-Sensor Data and Hazardous Gas Leakages
- (1)
- The meteorological condition in terms of wind speed and wind direction is known.
- (2)
- Under this meteorological condition, the hazardous gas leakages from the S possible leaking sources can be detected by sensors with .
- (3)
- M > N sets of historical multi-sensor data have been collected over a period from the chemical industry park under this meteorological condition.
- (4)
- Over the period when the M sets of historical multi-sensor data were collected, there exist hazardous gas leakages from leaking sources with .
- (5)
- Among the M sets of collected multi-sensor data, there are sets of data that can cover IHGLSs. This implies that vectors , are linearly independent, where represents the strength of the hazardous gas leakage from the th of the leaking sources in the th of the hazardous-gas-leakage scenarios.
- (6)
- The concentration of hazardous gas at any location in the chemical industry park produced by hazardous gas leakages from all of the S possible leaking sources equals to the summation of S individual concentrations of hazardous gas at this location. Each of the S individual concentrations is the concentration of hazardous gas at the same location produced by hazardous gas leakage from each of the S possible sources.
- (i)
- equals the rank of matrix C, which is the same as the number of nonzero singular values of the matrix.
- (ii)
- are linearly independent rows of matrix C.
- (iii)
- are denoted as the multi-sensor data measured in a hazardous gas-leakage scenario where the hazardous gas leakages are generated by the same leaking sources as observed when the M sets of historical multi-sensor data are collected as specified in Assumption (3), and are represented as the strengths of hazardous gas leakages at the time point when are collected. Then:
4. Novel Multi-Sensor Data-Driven Approach to STE
| Algorithm 1: Hybrid genetic algorithm | |
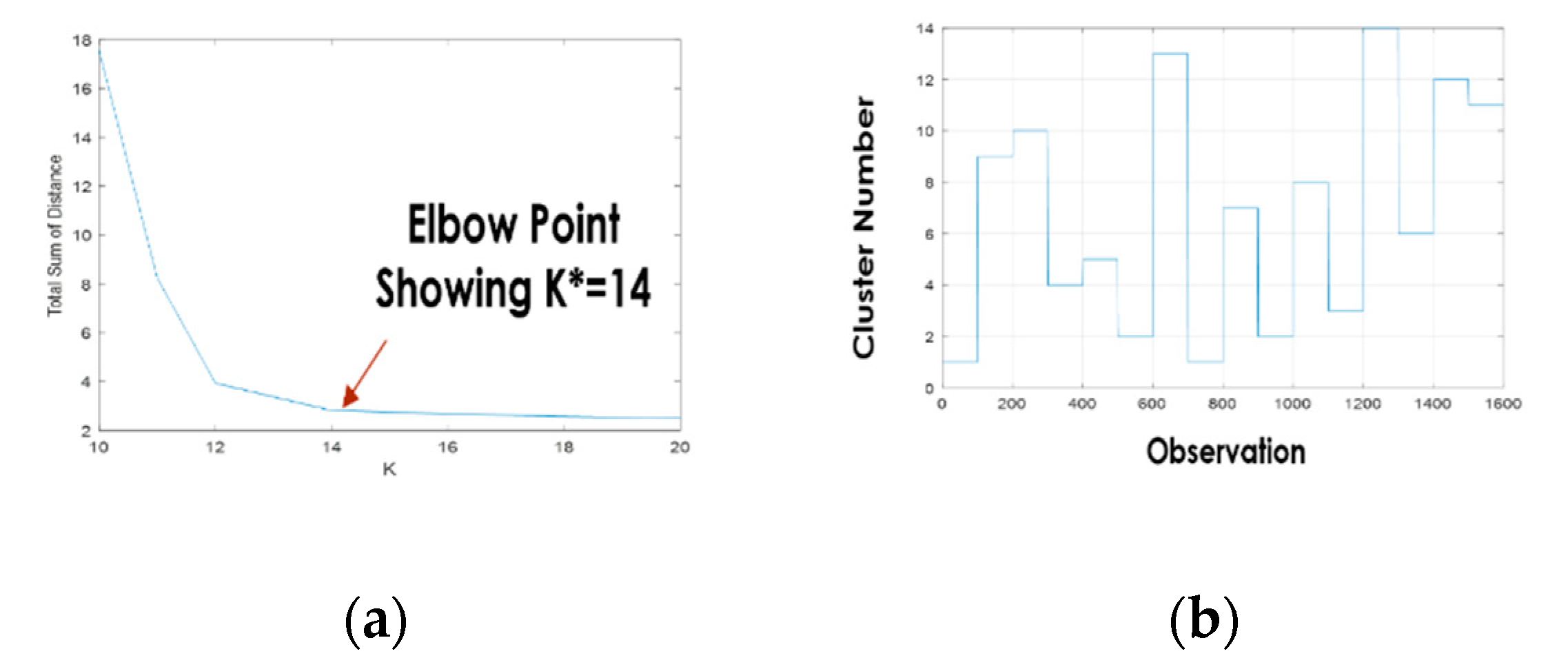
| Step 1: | Apply K mean clustering to find K* subgroups in the M sets of historical multi-sensor data such that data within each group are similar, while data in different groups are different. Denote the multi-sensor data in the k*th group thus determined as with . Evaluate
|
| Step 2: | Apply singular value decomposition (SVD) to matrix determined in Step 1 such that
|
| Step 3: | Denote
|
| Step 4: | From each of the sets of processed multi-sensor measurements in matrix , offline-apply a well-established STE method to determine the locations of hazardous-gas-leaking sources, as well as the strengths of hazardous gas leakages at these locations in each of the IHGLSs. Denote the obtained strengths of hazardous gas leakages in each of the IHGLSs as |
| Step 5: | Apply the multi-sensor data-driven STE model (21) to real-time measured multi-sensor data to determine the corresponding strengths of hazardous gas leakages at the locations that have been identified in Step 4. |
5. Simulation Studies
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Wang, B.; Li, D.; Wu, C. Characteristics of hazardous chemical accidents during hot season in China from 1989 to 2019 A statistical investigation. Saf. Sci. 2020, 129, 104788. [Google Scholar] [CrossRef]
- Wang, J.; Fan, Y.; Niu, Y. Routes to failure: Analysis of chemical accidents using the HFACS. J. Loss Prev. Process Ind. 2021, 75, 104695. [Google Scholar] [CrossRef]
- Tahmid, M.; Dey, S.; Syeda, S.R. Mapping human vulnerability and risk due to chemical accidents. J. Loss Prev. Process Ind. 2020, 68, 104289. [Google Scholar] [CrossRef]
- Zhang, Y.; Oldenburg, C.M.; Pan, L. Fast estimation of dense gas dispersion from multiple continuous CO2 surface leakage sources for risk assessment. Int. J. Greenh. Gas Control 2016, 49, 323–329. [Google Scholar] [CrossRef]
- Hutchinson, M.; Oh, H.; Chen, W.H. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef]
- Keats, A.; Yee, E.; Lien, F.S. Bayesian inference for source determination with applications to a complex urban environment. Atmos. Environ. 2007, 41, 5547–5551. [Google Scholar] [CrossRef]
- Xue, F.; Kikumoto, H.; Li, X.; Ooka, R. Bayesian source term estimation of atmospheric releases in urban areas using LES approach. J. Hazard. Mater. 2018, 349, 68–78. [Google Scholar] [CrossRef]
- Ryan, S.D.; Arisman, C.J. Uncertainty quantification of steady and transient source term estimation in an urban environment. Environ. Fluid Mech. 2021, 21, 713–740. [Google Scholar] [CrossRef]
- Bieringer, P.E.; Young, G.S.; Rodriguez, L.M.; Annunzio, A.J.; Vandenberghe, F.; Haupt, S.E. Paradigms and commonalities in atmospheric source term estimation methods. Atmos. Environ. 2017, 156, 102–112. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, H.; Huang, L.; Zhang, X. Source term estimation of hazardous material releases using hybrid genetic algorithm with composite cost functions. Eng. Appl. Artif. Intell. 2018, 75, 102–113. [Google Scholar] [CrossRef]
- Li, H.; Zhang, J.; Yi, J. Computational source term estimation of the Gaussian puff dispersion. Soft Comput. 2019, 23, 59–75. [Google Scholar] [CrossRef]
- Efthimiou, G.C.; Kovalets, I.V.; Argyropoulos, C.D.; Venetsanos, A.; Andronopoulos, S.; Kakosimos, K.E. Evaluation of an inverse modelling methodology for the prediction of a stationary point pollutant source in complex urban environments. Build. Environ. 2018, 143, 107–119. [Google Scholar] [CrossRef]
- Cho, J.; Kim, H.; Gebreselassie, A.L.; Shin, D. Deep neural network and random forest classifier for source tracking of chemical leaks using fence monitoring data. J. Loss Prev. Process Ind. 2018, 56, 548–558. [Google Scholar] [CrossRef]
- Xu, J.; Du, W.; Xu, Q.; Dong, J.; Wang, B. Federated learning based atmospheric source term estimation in urban environments. Comput. Chem. Eng. 2021, 155, 107505. [Google Scholar] [CrossRef]
- Xu, Q.; Du, W.; Xu, J.; Dong, J. Neural network-based source tracking of chemical leaks with obstacles. Chin. J. Chem. Eng. 2021, 33, 211–220. [Google Scholar] [CrossRef]
- Ling, Y.; Yue, Q.; Chai, C.; Shan, Q.; Hei, D.; Jia, W. Nuclear accident source term estimation using Kernel Principal Component Analysis, Particle Swarm Optimization, and Backpropagation Neural Networks. Ann. Nucl. Energy 2019, 136, 107031. [Google Scholar] [CrossRef]
- Ling, Y.; Yue, Q.; Huang, T.; Shan, Q.; Hei, D.; Zhang, X.; Jia, W. Multi-nuclide source term estimation method for severe nuclear accidents from sequential gamma dose rate based on a recurrent neural network. J. Hazard. Mater. 2021, 414, 125546. [Google Scholar] [CrossRef]
- Ma, D.; Zhang, Z. Contaminant dispersion prediction and source estimation with integrated Gaussian-machine learning network model for point source emission in atmosphere. J. Hazard. Mater. 2016, 311, 237–245. [Google Scholar] [CrossRef]
- Kumar, P.; Singh, S.K.; Ngae, P.; Feiz, A.A.; Turbelin, G. Assessment of a CFD model for short-range plume dispersion: Applications to the Fusion Field Trial 2007 (FFT-07) diffusion experiment. Atmos. Res. 2017, 197, 84–93. [Google Scholar] [CrossRef]
- Szegedy, C.; Zaremba, W.; Sutskever, I.; Bruna, J.; Erhan, D.; Goodfellow, I.; Fergus, R. Intriguing properties of neural networks. arXiv 2013, arXiv:1312.6199. [Google Scholar]
- Rybchuk, A.; Alden, C.B.; Lundquist, J.K.; Rieker, G.B. A Statistical Evaluation of WRF-LES Trace Gas Dispersion Using Project Prairie Grass Measurements. Mon. Weather Rev. 2021, 149, 1619–1633. [Google Scholar] [CrossRef]
- Jia, M.; Huang, X.; Ding, K.; Liu, Q.; Zhou, D.; Ding, A. Impact of data assimilation and aerosol radiation interaction on Lagrangian particle dispersion modelling. Atmos. Environ. 2012, 247, 118179. [Google Scholar] [CrossRef]
- De Visscher, A. Air Dispersion Modeling: Foundations and Applications; Chapter 6, Section 6.7; Wiley: New York, NY, USA, 2013. [Google Scholar]
- Zhou, W.; Zhao, X.; Cheng, K.; Cao, Y.; Yang, S.H.; Chen, J. Source term estimation with deficient sensors: Error analysis and mobile station route design. Process Saf. Environ. Prot. 2021, 154, 97–103. [Google Scholar] [CrossRef]
- Seinfeld, J.H.; Pandis, S.N. Atmospheric Chemistry and Physics from Air Pollution to Climate Change, 3rd ed.; Wiley: New York, NY, USA, 2016; p. 1414. [Google Scholar]
- Abbasia, A.R.; Mahmoudi, M.R. Application of statistical control charts to discriminate transformer winding defects. Electr. Power Syst. Res. 2021, 191, 106890. [Google Scholar] [CrossRef]
- Abbasia, A.R.; Mahmoudi, M.R.; Avazzadeh, Z. Diagnosis and clustering of power transformer winding fault types by crosscorrelation and clustering analysis of FRA results. IET Gener. Transm. Distrib. 2018, 12, 4301–4309. [Google Scholar] [CrossRef]
- Abbasia, A.R.; Mahmoudi, M.R.; Arefi, M.M. Transformer Winding Faults Detection Based on Time Series Analysis. IEEE Trans. Instrum. Meas. 2021, 70, 3516210. [Google Scholar] [CrossRef]
- Ma, D.; Tan, W.; Zhang, Z.; Hu, J. Parameter identification for continuous point emission source based on Tikhonov regularization method coupled with particle swarm optimization algorithm. J. Hazard. Mater. 2017, 325, 239–250. [Google Scholar] [CrossRef]
- Zheng, X.; Chen, Z. Inverse calculation approaches for source determination in hazardous chemical releases. J. Loss Prev. Process Ind. 2011, 24, 293–301. [Google Scholar] [CrossRef]
- Newman, M.; Hatfield, K.; Hayworth, J.; Rao, P.S.C.; Stauffer, T. A hybrid method for inverse characterization of subsurface contaminant flux. J. Contam. Hydrol. 2005, 81, 34–62. [Google Scholar] [CrossRef]
- Haupt, S.E. A demonstration of coupled receptor/dispersion modelling with a genetic algorithm. Atmos. Environ. 2005, 39, 7181–7189. [Google Scholar] [CrossRef]
- Haupt, S.E.; Young, G.S.; Allen, C.T. A genetic algorithm method to assimilate sensor data for a toxic contaminant release. J. Comput. 2007, 2, 85–93. [Google Scholar] [CrossRef]
- Hansen, N. The CMA Evolution Strategy: A Comparing Review. StudFuzz 2006, 192, 75–102. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Leaking Sources | Leaking Source Locations | Sensors | Sensor Locations | ||||
|---|---|---|---|---|---|---|---|
| X0 (m) | Y0 (m) | Z0 (m) | X (m) | Y (m) | Z(m) | ||
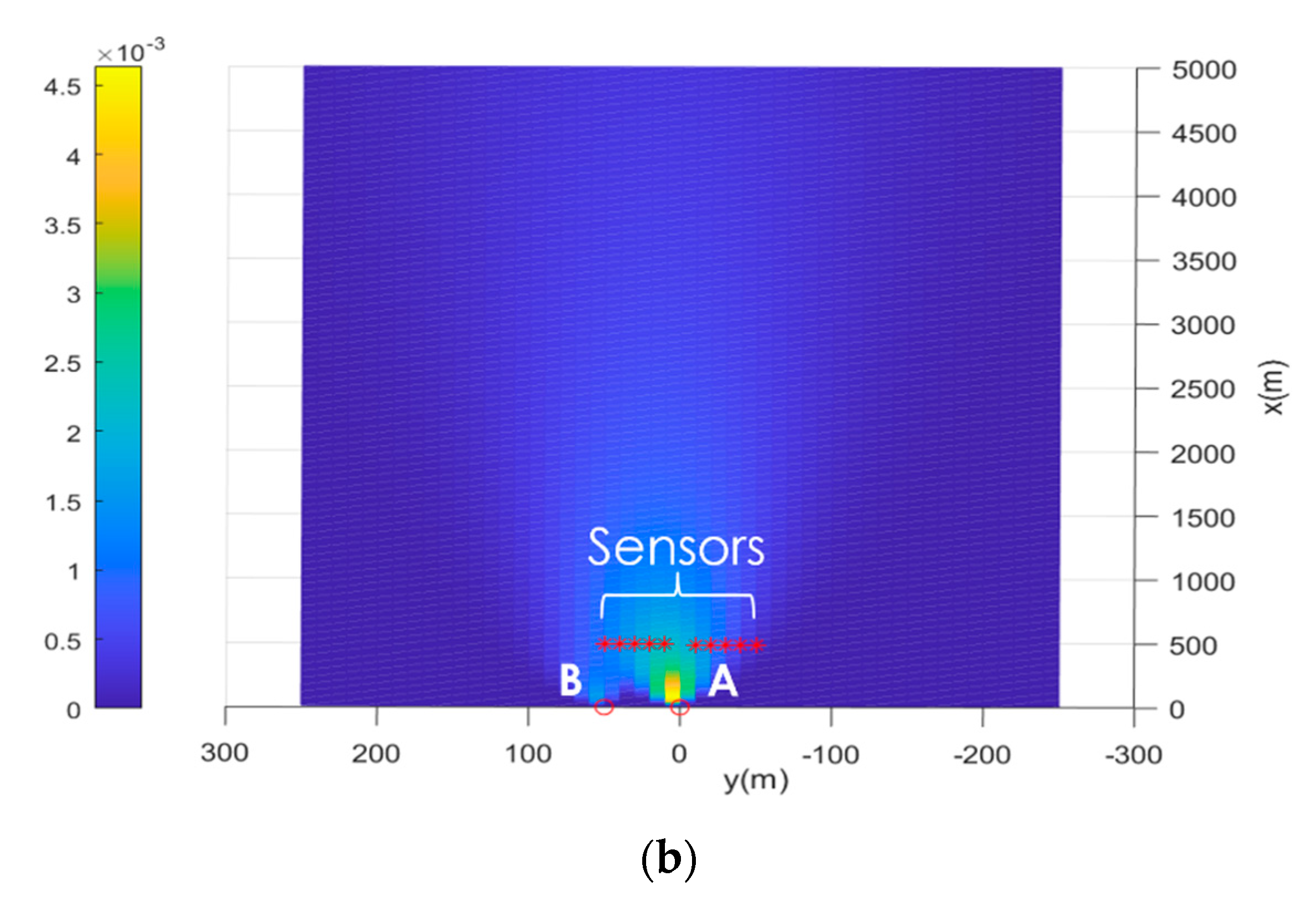
| A | 0 | 0 | 0 | Sensor 1 Sensor 2 Sensor 3 Sensor 4 Sensor 5 Sensor 6 Sensor 7 Sensor 8 Sensor 9 Sensor 10 | 490 490 490 490 490 490 490 490 490 490 | −50 −40 −30 −20 −10 10 20 30 40 50 | 9 9 9 9 9 9 9 9 9 9 |
| B | 0 | 50 | 0 | ||||
| Leaking Scenarios | (QA, QB) g/s |
|---|---|
| 1 (observations 1:100) | (7.5, 7.5) |
| 2 (observations 101:200) | (7.5, 2.5) |
| 3 (observations 201:300) | (5, 15) |
| 4 (observations 301:400) | (15, 5) |
| 5 (observations 401:500) | (10, 10) |
| 6 (observations 501:600) | (2.5, 2.5) |
| 7(observations 601:700) | (5, 5) |
| 8 (observations 701:800) | (7.5, 7.5) |
| 9 (observations 801:900) | (1, 1) |
| 10 (observations 901:1000) | (2.5, 2.5) |
| 11 (observations 1001:1100) | (0, 10) |
| 12 (observations 1101:1200) | (10, 0) |
| 13 (observations 1201:1300) | (5, 0) |
| 14 (observations 1301:1400) | (7, 0) |
| 15 (observations 1401:1500) | (7, 1) |
| 16 (observations 1501:1600) | (1, 2) |
| Cluster | Average Concentration in Each Cluster (g/m3) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.0003 | 0.0006 | 0.0010 | 0.0016 | 0.0020 | 0.0025 | 0.0025 | 0.0025 | 0.0025 | 0.0024 |
| 2 | 0.0001 | 0.0002 | 0.0003 | 0.0005 | 0.0007 | 0.0008 | 0.0009 | 0.0008 | 0.0008 | 0.0008 |
| 3 | 0.0004 | 0.0008 | 0.0014 | 0.0020 | 0.0025 | 0.0025 | 0.0020 | 0.0014 | 0.0008 | 0.0004 |
| 4 | 0.0006 | 0.0012 | 0.0021 | 0.0031 | 0.0039 | 0.0042 | 0.0037 | 0.0031 | 0.0025 | 0.0020 |
| 5 | 0.0004 | 0.0008 | 0.0014 | 0.0021 | 0.0027 | 0.0034 | 0.0034 | 0.0034 | 0.0033 | 0.0031 |
| 6 | 0.0003 | 0.0006 | 0.0010 | 0.0014 | 0.0018 | 0.0018 | 0.0014 | 0.0010 | 0.0006 | 0.0003 |
| 7 | 0.0000 | 0.0001 | 0.0001 | 0.0002 | 0.0003 | 0.0003 | 0.0003 | 0.0003 | 0.0003 | 0.0003 |
| 8 | 0.0000 | 0.0000 | 0.0000 | 0.0001 | 0.0002 | 0.0008 | 0.0014 | 0.0020 | 0.0025 | 0.0027 |
| 9 | 0.0003 | 0.0006 | 0.0010 | 0.0015 | 0.0019 | 0.0021 | 0.0019 | 0.0015 | 0.0012 | 0.0010 |
| 10 | 0.0002 | 0.0004 | 0.0007 | 0.0011 | 0.0015 | 0.0025 | 0.0031 | 0.0037 | 0.0042 | 0.0043 |
| 11 | 0.0000 | 0.0001 | 0.0001 | 0.0002 | 0.0003 | 0.0004 | 0.0005 | 0.0005 | 0.0006 | 0.0006 |
| 12 | 0.0003 | 0.0006 | 0.0010 | 0.0014 | 0.0018 | 0.0019 | 0.0016 | 0.0012 | 0.0008 | 0.0006 |
| 13 | 0.0002 | 0.0004 | 0.0007 | 0.0010 | 0.0014 | 0.0017 | 0.0017 | 0.0017 | 0.0017 | 0.0016 |
| 14 | 0.0002 | 0.0004 | 0.0007 | 0.0010 | 0.0013 | 0.0013 | 0.0010 | 0.0007 | 0.0004 | 0.0002 |
| Hazardous-Gas-Leaking Scenarios | Hazardous-Gas-Leaking Source Location | Hazardous-Gas-Leaking Strength g/s | Estimated Hazardous-Gas-Leaking-Source Location | Estimated Hazardous-Gas-Leaking Strength g/s |
|---|---|---|---|---|
| Scenario 1 | ||||
| Scenario 2 | ||||
| Corresponding Sensor Data C = [C(1), C(2), C(3), C(4), C(5), C(6), C(7), C(8), C(9), C(10)] g/m3 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| (20, 2) | [0.0008 | 0.0016 | 0.0027 | 0.0040 | 0.0051 | 0.0052 | 0.0043 | 0.0031 | 0.0021 | 0.0013] | (20.0762, 2.0618) |
| (0, 0) | [0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0] | (0, 0) |
| (1, 3.5) | [0.0000 | 0.0001 | 0.0001 | 0.0002 | 0.0003 | 0.0005 | 0.0007 | 0.0008 | 0.0010 | 0.0010] | (1.4737, 3.6776) |
| (22, 17) | [0.0009 | 0.0018 | 0.0031 | 0.0045 | 0.0059 | 0.0070 | 0.0068 | 0.0064 | 0.0061 | 0.0055] | (24.1291, 17.8275) |
| (4.1, 4.1) | [0.0002 | 0.0003 | 0.0006 | 0.0009 | 0.0011 | 0.0014 | 0.0014 | 0.0014 | 0.0014 | 0.0013] | (4.6256, 4.3020) |
| (6, 0) | [0.0002 | 0.0005 | 0.0008 | 0.0012 | 0.0015 | 0.0015 | 0.0012 | 0.0008 | 0.0005 | 0.0002] | (5.9399, −0.0123) |
| (9, 9) | [0.0004 | 0.0007 | 0.0013 | 0.0019 | 0.0024 | 0.0030 | 0.0031 | 0.0031 | 0.0030 | 0.0028] | (10.1537, 9.4435) |
| (14.14) | [0.0006 | 0.0011 | 0.0019 | 0.0029 | 0.0038 | 0.0047 | 0.0047 | 0.0047 | 0.0047 | 0.0044] | (15.7946, 14.6899) |
| (13, 1) | [0.0005 | 0.0010 | 0.0018 | 0.0026 | 0.0033 | 0.0034 | 0.0028 | 0.0020 | 0.0013 | 0.0008] | (13.0080, 1.0248) |
| (1, 12) | [0.0000 | 0.0001 | 0.0002 | 0.0003 | 0.0005 | 0.0012 | 0.0018 | 0.0026 | 0.0031 | 0.0033] | (2.6484, 12.6138) |
| Hazardous-Gas-Leaking-Source Locations | Estimated Hazardous-Gas-Leaking-Source Locations | ||||||||||
| (20, 2) | (19.9965, 1.9479) |
| (0, 0) | (0, 0) |
| (1, 3.5) | (1.4323, 3.4967) |
| (22, 17) | (23.8788, 16.9396) |
| (4.1, 4.1) | (4.5687, 4.0886) |
| (6, 0) | (5.9226, −0.0155) |
| (9, 9) | (10.0288, 8.9749) |
| (14.14) | (15.6003, 13.9609) |
| (13, 1) | (12.9596, 0.9662) |
| (1, 12) | (2.5136, 11.9950) |
| Hazardous-Gas-Leaking-Source Locations | Estimated Hazardous-Gas-Leaking-Source Locations |
| (20, 2) | (19.9378, 7.3274) |
| (0, 0) | (0, 0) |
| (1, 3.5) | (1.6664, 3.6142) |
| (22, 17) | (24.8458, 22.1976) |
| (4.1, 4.1) | (4.8138, 5.0269) |
| (6, 0) | (5.8632, 1.6251) |
| (9, 9) | (10.5670, 11.0347) |
| (14.14) | (16.4375, 17.1651) |
| (13, 1) | (12.9005, 4.4762) |
| (1, 12) | (3.3401, 11.7337) |
| Hazardous-Gas-Leaking-Source Locations | Estimated Hazardous-Gas-Leaking-Source Locations |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, Z.; Wang, B.; Wang, Y.; Cao, C.; Peng, X.; Du, W.; Qian, F. A Novel Multi-Sensor Data-Driven Approach to Source Term Estimation of Hazardous Gas Leakages in the Chemical Industry. Processes 2022, 10, 1633. https://doi.org/10.3390/pr10081633
Lang Z, Wang B, Wang Y, Cao C, Peng X, Du W, Qian F. A Novel Multi-Sensor Data-Driven Approach to Source Term Estimation of Hazardous Gas Leakages in the Chemical Industry. Processes. 2022; 10(8):1633. https://doi.org/10.3390/pr10081633
Chicago/Turabian StyleLang, Ziqiang, Bing Wang, Yiting Wang, Chenxi Cao, Xin Peng, Wenli Du, and Feng Qian. 2022. "A Novel Multi-Sensor Data-Driven Approach to Source Term Estimation of Hazardous Gas Leakages in the Chemical Industry" Processes 10, no. 8: 1633. https://doi.org/10.3390/pr10081633
APA StyleLang, Z., Wang, B., Wang, Y., Cao, C., Peng, X., Du, W., & Qian, F. (2022). A Novel Multi-Sensor Data-Driven Approach to Source Term Estimation of Hazardous Gas Leakages in the Chemical Industry. Processes, 10(8), 1633. https://doi.org/10.3390/pr10081633