

SOC Estimation of E-Cell Combining BP Neural Network and EKF Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
3. Study on SOC Estimation of E-Cell Combining BP and EKF
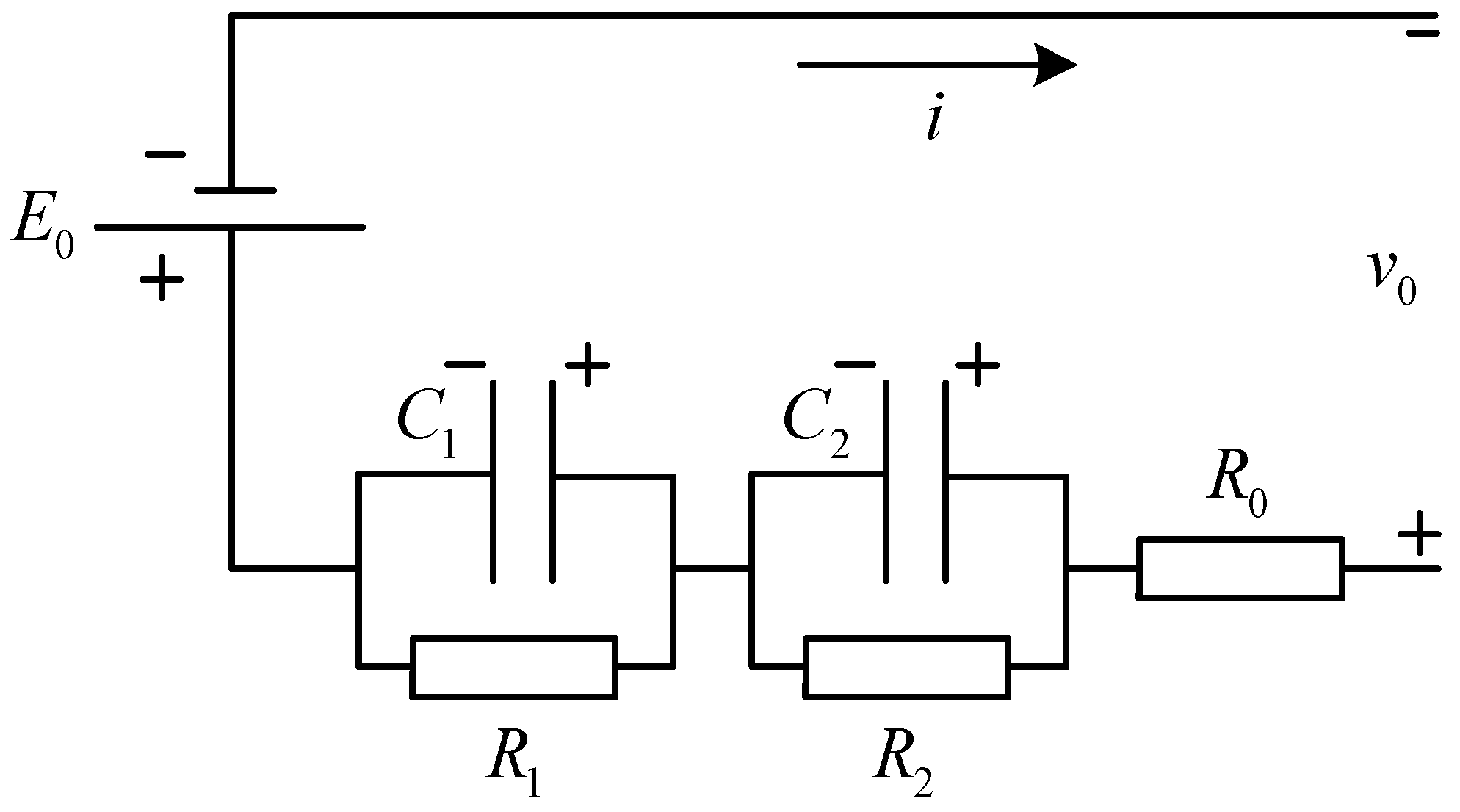
3.1. E-Cell Modelling
3.2. EKF-Based E-Cell SOC Estimation
3.3. Optimization of Estimation Models Based on BP Neural Networks
4. Analysis of the Application Effect of the BP-EKF Based E-Cell SOC Estimation Model
4.1. Validation of Battery Modelling Effects
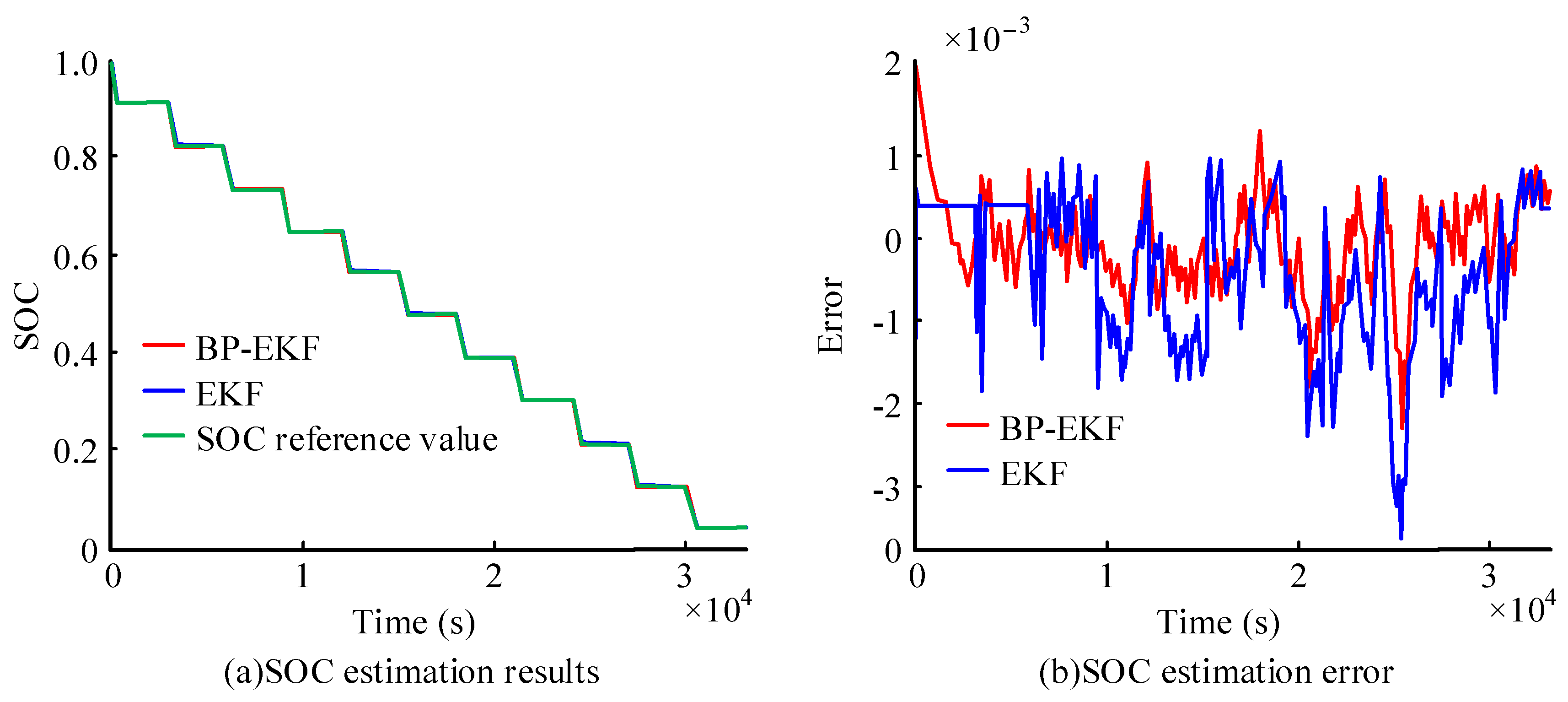
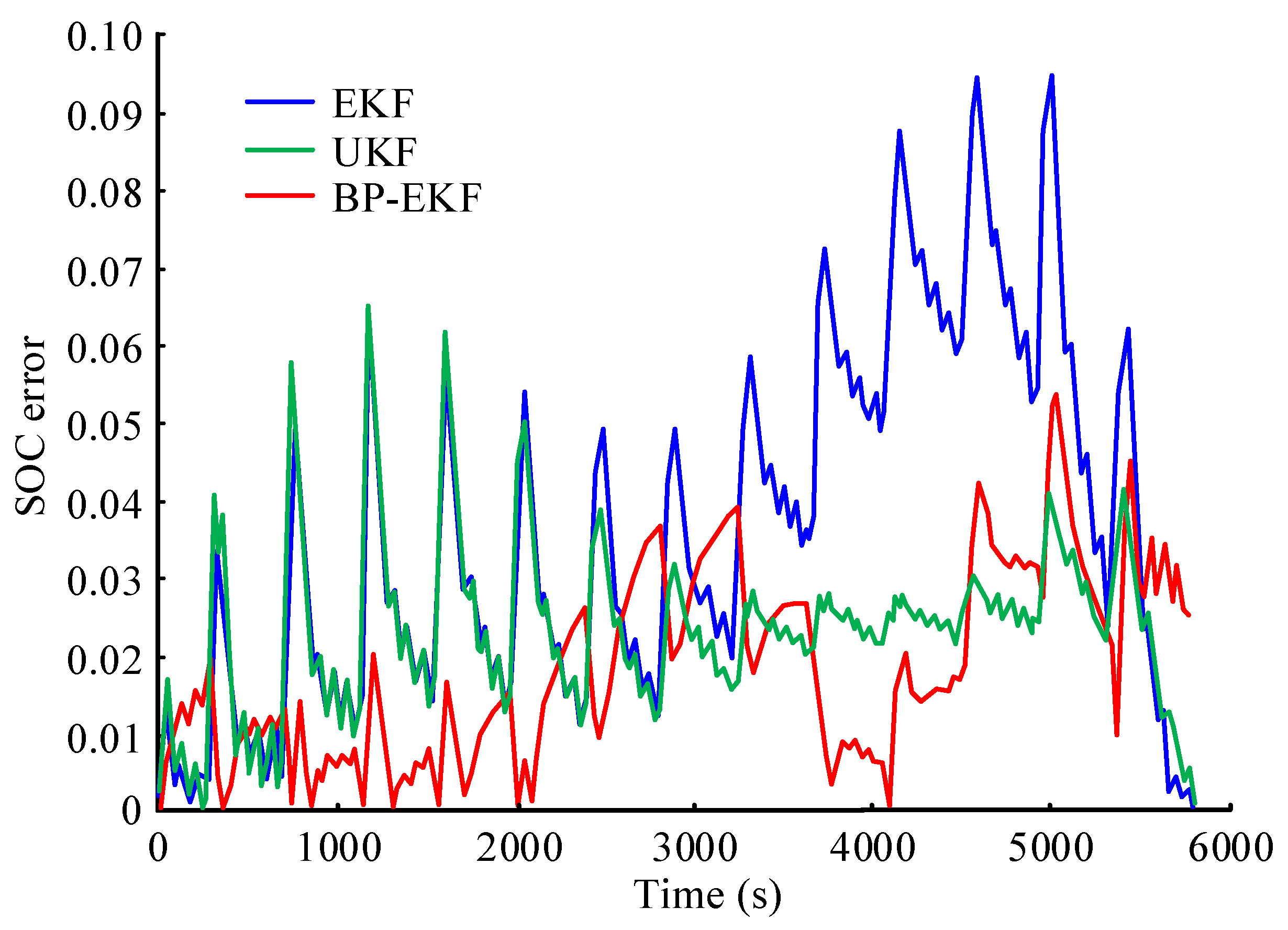
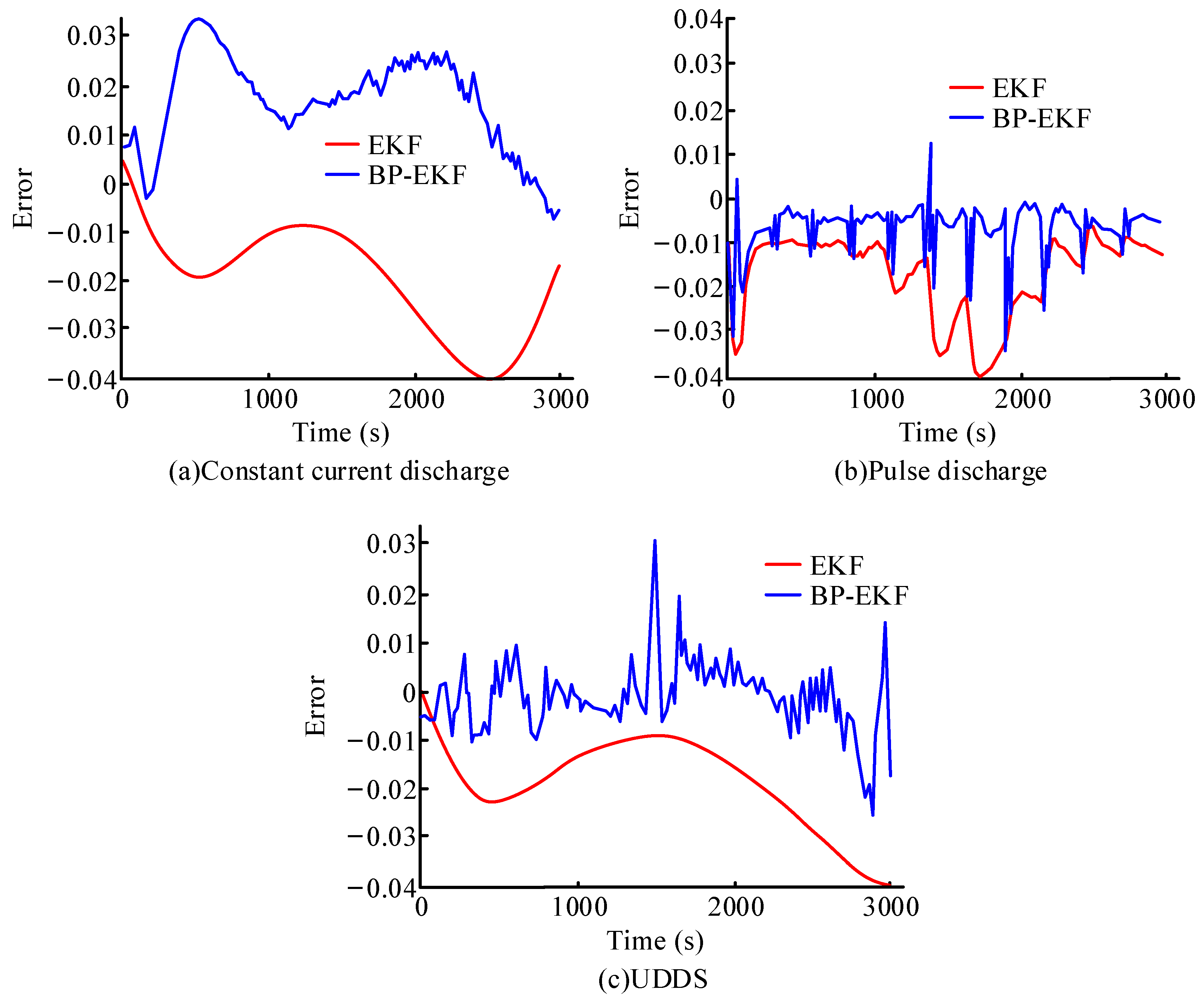
4.2. Analysis of the Estimation Accuracy of the BP-EKF Model
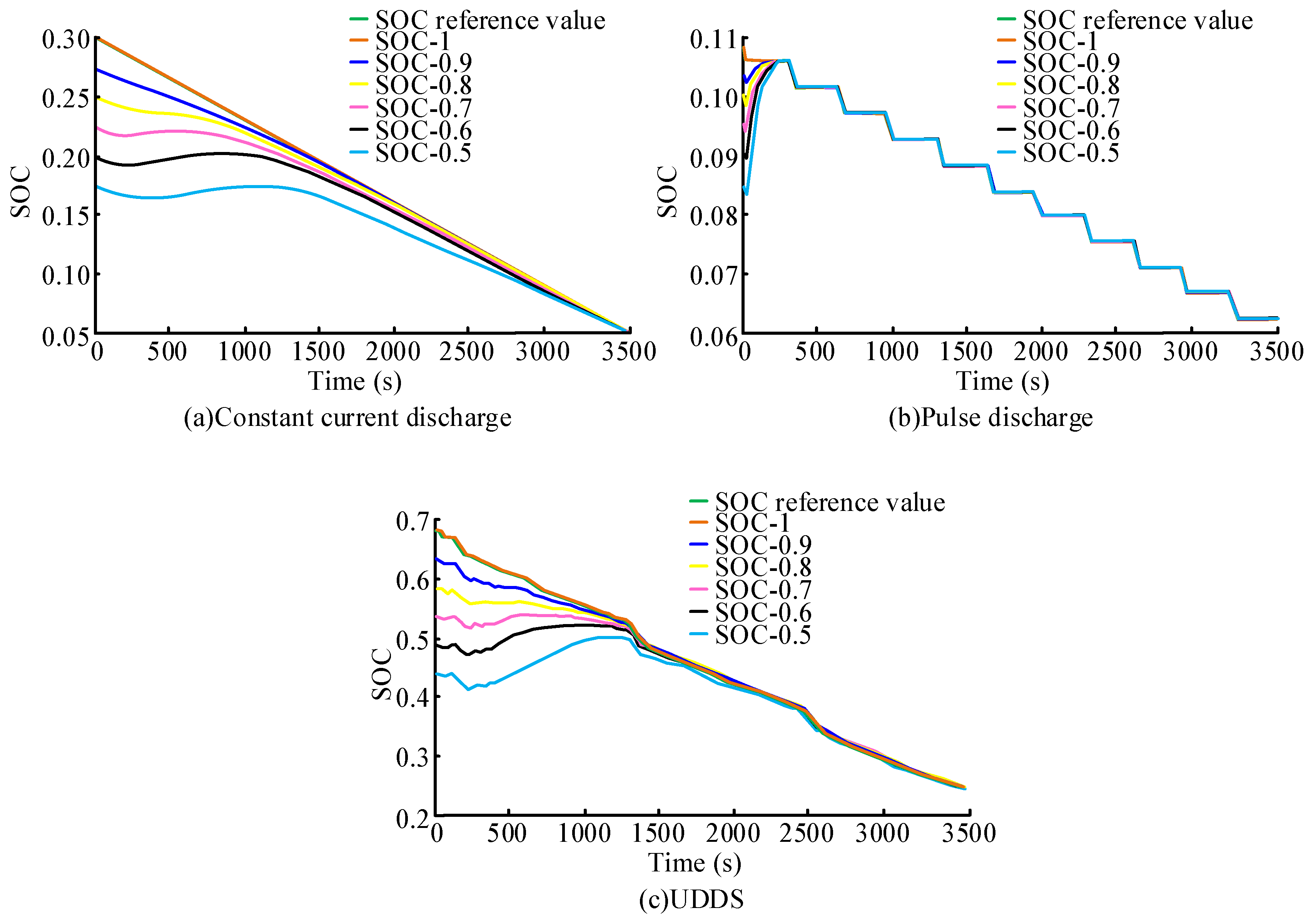
4.3. Robustness Analysis of the BP-EKF Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bi, J.; Wang, Y.; Sai, Q.; Ding, C. Estimating remaining driving range of battery EV based on real-world data: A case study of Beijing, China. Energy 2019, 169, 833–843. [Google Scholar] [CrossRef]
- Chen, X.; Lei, H.; Xiong, R.; Shen, W.; Yang, R. A novel approach to reconstruct open circuit voltage for state of charge estimation of lithium ion batteries in EV. Appl. Energy 2019, 255, 113758. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.A.; Lipu, M.H.; Ker, P.J. State of charge estimation for lithium-ion batteries using model-based and data-driven methods: A review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Kim, W.; Lee, P.Y.; Kim, J.; Kim, K.S. A robust state of charge estimation approach based on nonlinear battery cell model for lithium-ion batteries in EV. IEEE Trans. Veh. Technol. 2021, 70, 5638–5647. [Google Scholar] [CrossRef]
- Zhang, Y.; Chu, L.; Ding, Y.A.N.; Xu, N.A.N.; Guo, C.; Fu, Z.; Xu, L.; Tang, X.; Liu, Y. A hierarchical energy management strategy based on model predictive control for plug-in hybrid EV. IEEE Access 2019, 16, 2303–2308. [Google Scholar]
- Wang, C.; Yang, R.; Yu, Q. Wavelet transform based energy management strategies for plug-in hybrid EV considering temperature uncertainty. Appl. Energy 2019, 256, 113928. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.A.; Lipu, M.S.H.; Sahari, K.S.; Ker, P.J.; Muttaqi, K.M. State-of-charge estimation of li-ion battery in EV: A deep neural network approach. IEEE Trans. Ind. Appl. 2020, 56, 5565–5574. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Shen, W.; Sun, F. A novel fractional order model for state of charge estimation in lithium ion batteries. IEEE Trans. Veh. Technol. 2019, 68, 4130–4139. [Google Scholar] [CrossRef]
- Sarrafan, K.; Muttaqi, K.M.; Sutanto, D. Real-time estimation of model parameters and state-of-charge of li-ion batteries in EV using a new mixed estimation model. IEEE Trans. Ind. Appl. 2020, 56, 5417–5428. [Google Scholar] [CrossRef]
- He, Z.; Yang, Z.; Cui, X.; Li, E. A method of state-of-charge estimation for EV power lithium-ion battery using a novel adaptive extended Kalman filter. IEEE Trans. Veh. Technol. 2020, 69, 14618–14630. [Google Scholar] [CrossRef]
- Wadi, A.; Abdel-Hafez, M.F.; Hussein, A.A.; Alkhawaja, F. Alleviating dynamic model uncertainty effects for improved e-cell soc estimation of EVs in highly dynamic environments. IEEE Trans. Veh. Technol. 2021, 70, 6554–6566. [Google Scholar] [CrossRef]
- Whl, A.; Al, A.; Fm, A. Real-time rotor effective wind speed estimation using Gaussian processregression and Kalman filtering. Renew. Energy 2021, 169, 670–686. [Google Scholar]
- Han, F.; Ashton, P.M.; Li, M.; Pisica, I.; Taylor, G.; Rawn, B.; Ding, Y. A data driven approach to robust event detection in smart grids based on random matrix theory and kalman filtering. Energies 2021, 14, 2166. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, R.; Li, S.; Qi, S. Temperature sensor denoising algorithm based on curve fitting and compound kalman filtering. Sensors 2020, 20, 1959. [Google Scholar] [CrossRef]
- Zhou, T.; Jiang, D.; Lin, Z.; Han, G.; Xu, X.; Qin, J. Hybrid dual Kalman filtering model for short-term traffic flow forecasting. IET Intell. Transp. Syst. 2019, 13, 1023–1032. [Google Scholar] [CrossRef]
- Mo, Y.; Song, Z.; Li, H.; Jiang, Z. A hierarchical safety control strategy for exoskeleton robot based on maximum correntropy kalman filter and bounding box. Robotica 2019, 37, 2165–2175. [Google Scholar] [CrossRef]
- Li, Y.; Gao, X.; Chen, Y.; Zhou, X.; Zhang, Y.; You, D. Modeling for tracking micro gap weld based on magneto-optical sensing and kalman filtering. IEEE Sens. J. 2020, 21, 11598–11614. [Google Scholar] [CrossRef]
- Esfandyari, M.J.; Esfahanian, V.; Yazdi, M.H.; Nehzati, H.; Shekoofa, O. A new approach to consider the influence of aging state on Lithium-ion battery state of power estimation for hybrid EV. Energy 2019, 176, 505–520. [Google Scholar] [CrossRef]
- Yu, D.; Ma, Z.; Wang, R. Efficient smart grid load balancing via fog and cloud computing. Math. Probl. Eng. 2022, 2022, 3151249. [Google Scholar] [CrossRef]
- Wang, S.; Lu, L.; Han, X.; Ouyang, M.; Feng, X. Virtual-battery based droop control and energy storage system size optimization of a DC microgrid for electric vehicle fast charging station. Appl. Energy 2020, 259, 114146. [Google Scholar] [CrossRef]
- Singh, B.; Kushwaha, R. Power factor pre-regulation in interleaved luo converter fed e-cell charger. IEEE Trans. Ind. Appl. 2021, 57, 2870–2882. [Google Scholar] [CrossRef]
- Yu, D.; Wu, J.; Wang, W.; Gu, B. Optimal performance of hybrid energy system in the presence of electrical and heat storage systems under uncertainties using stochastic p-robust optimization technique. Sustain. Cities Soc. 2022, 83, 103935. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Zhang, L. Co-estimation of capacity and state-of-charge for lithium-ion batteries in EV. Energy 2019, 174, 33–44. [Google Scholar] [CrossRef]
- Hannan, M.A.; How, D.N.; Lipu, M.H.; Ker, P.J.; Dong, Z.Y.; Mansur, M.; Blaabjerg, F. SOC estimation of li-ion batteries with learning rate-optimized deep fully convolutional network. IEEE Trans. Power Electron. 2020, 36, 7349–7353. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Ji, W.; Zhao, X. SOC Estimation of E-Cell Combining BP Neural Network and EKF Algorithm. Processes 2022, 10, 1721. https://doi.org/10.3390/pr10091721
Gao Y, Ji W, Zhao X. SOC Estimation of E-Cell Combining BP Neural Network and EKF Algorithm. Processes. 2022; 10(9):1721. https://doi.org/10.3390/pr10091721
Chicago/Turabian StyleGao, Yun, Wujun Ji, and Xin Zhao. 2022. "SOC Estimation of E-Cell Combining BP Neural Network and EKF Algorithm" Processes 10, no. 9: 1721. https://doi.org/10.3390/pr10091721
APA StyleGao, Y., Ji, W., & Zhao, X. (2022). SOC Estimation of E-Cell Combining BP Neural Network and EKF Algorithm. Processes, 10(9), 1721. https://doi.org/10.3390/pr10091721