




Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis
Abstract
:1. Introduction
2. Wavelet Noise Reduction and Network Prediction
2.1. Wavelet Decomposition Noise Reduction
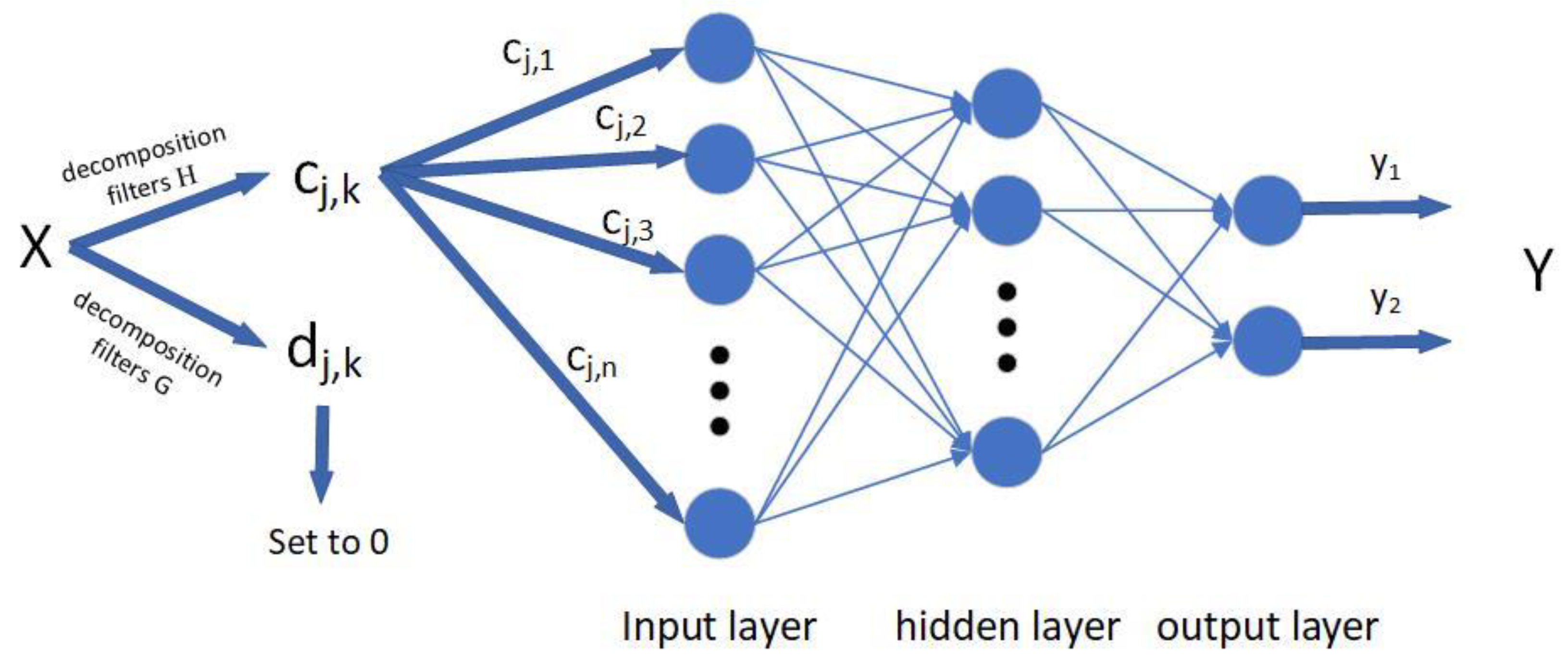
2.2. Wavelet Network Prediction Model
- (1)
- Using the db wavelet to decompose the settlement monitoring data and obtaining the training sample set of the prediction model by eliminating high-frequency signals.
- (2)
- Using the training sample set, build and train the W-RBF prediction model.
- (3)
- Using the test data set to verify the accuracy of the W-RBF model.
- (4)
- Predict the surface subsidence value.
3. Project Overview
3.1. Engineering Background
3.2. Hydrogeological Conditions
3.3. Construction Technology and Monitoring Layout
- (1)
- All excavation surfaces and supporting systems of the station foundation pit;
- (2)
- The monitoring range of surface settlement is taken as the 3H range on both sides of the edge of the foundation pit;
- (3)
- The monitoring range of the flexible pipeline is taken as the 2H range on both sides of the edge of the foundation pit; the monitoring range of rigid or pressure underground pipelines such as water supply, rainwater, and sewage shall be taken as the 3H range on both sides of the edge of the foundation pit;
- (4)
- Considering the influence of the precipitation of the confined water, the settlement range of the building shall be expanded to the 5H range on both sides of the edge of the foundation pit; when the confined water is not lowered, the monitoring range is taken as the 3H range on both sides of the edge of the foundation pit; after the confined water dewatering well is opened, the monitoring range of building settlement should be increased according to the precipitation situation.
4. Engineering Applications
4.1. Selection of Wavelet Parameters
4.2. Prediction and Analysis of Surface Subsidence
5. Conclusions and Outlooks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, P.; Ma, S.; Yue, Z.; Lu, C.; Tian, S.; Li, A. A theoretical study on the spatial effect of water-rich foundation pit instability failure. AIP Adv. 2021, 11, 015049. [Google Scholar] [CrossRef]
- Yang, W.; Hu, Y.; Hu, C.; Yang, M. An agent-based simulation of deep foundation pit emergency evacuation modeling in the presence of collapse disaster. Symmetry 2018, 10, 581. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Wu, R.; Congress, S.S.C.; Du, Q.; Cai, G.; Li, Z. Design optimization of the soil nail wall-retaining pile-anchor cable supporting system in a large-scale deep foundation pit. Acta Geotech. 2021, 16, 2251–2274. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, S.; Zhou, C.; Luo, H. Intelligent approach based on random forest for safety risk prediction of deep foundation pit in subway stations. J. Comput. Civ. Eng. 2019, 33, 05018004. [Google Scholar] [CrossRef]
- Liu, Q.; Yang, C.Y.; Lin, L. Deformation Prediction of a Deep Foundation Pit Based on the Combination Model of Wavelet Transform and Gray BP Neural Network. Math. Probl. Eng. 2021, 2021, 2161254. [Google Scholar] [CrossRef]
- Terzaghi, K.; Peck, R.B.; Mesri, G. Soil Mechanics in Engineering Practice; John Wiley & Sons: Hoboken, NJ, USA, 1996. [Google Scholar]
- Wang, Y.; Yang, G. Prediction of Composite Foundation Settlement Based on Multi-Variable Gray Model. In Proceedings of the Applied Mechanics and Materials; Trans Tech Publ.: Stafa-Zurich, Switzerland, 2014. [Google Scholar]
- Ismail, A.; Jeng, D.-S. Modelling load–settlement behaviour of piles using high-order neural network (HON-PILE model). Eng. Appl. Artif. Intell. 2011, 24, 813–821. [Google Scholar] [CrossRef]
- Nixon, I.K. Standard penetration test State-of-the-art report. In Proceedings of the Penetration Testing; Routledge: London, UK, 2021. [Google Scholar]
- Nejad, F.P.; Jaksa, M.B. Load-settlement behavior modeling of single piles using artificial neural networks and CPT data. Comput. Geotech. 2017, 89, 9–21. [Google Scholar] [CrossRef]
- Tealab, A. Time series forecasting using artificial neural networks methodologies: A systematic review. Future Comput. Inform. J. 2018, 3, 334–340. [Google Scholar] [CrossRef]
- Fang, K.; Zhao, T.; Zhang, Y.; Qiu, Y.; Zhou, J. Rock cone penetration test under lateral confining pressure. Int. J. Rock Mech. Min. Sci. 2019, 119, 149–155. [Google Scholar] [CrossRef]
- Lv, Y.; Liu, T.; Ma, J.; Wei, S.; Gao, C. Study on settlement prediction model of deep foundation pit in sand and pebble strata based on grey theory and BP neural network. Arab. J. Geosci. 2020, 13, 1–13. [Google Scholar] [CrossRef]
- Su, J.; Xia, Y.; Xu, Y.; Zhao, X.; Zhang, Q. Settlement monitoring of a supertall building using the Kalman filtering technique and forward construction stage analysis. Adv. Struct. Eng. 2014, 17, 881–893. [Google Scholar] [CrossRef]
- Kim, Y.; Bang, H. Introduction to Kalman filter and its applications. Introd. Implement. Kalman Filter 2018, 1, 1–16. [Google Scholar]
- Chakraborty, S.; Shaikh, S.H.; Chakrabarti, A.; Ghosh, R. An image denoising technique using quantum wavelet transform. Int. J. Theor. Phys. 2020, 59, 3348–3371. [Google Scholar] [CrossRef]
- Kaplun, D.; Voznesensky, A.; Sinitca, A.; Veligosha, A.; Malyshko, N. Using Artificial Neural Networks and Wavelet Transform for Image Denoising. In Proceedings of the International Conference on Mathematics and Its Applications in New Computer Systems; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Cohen, M.X. A better way to define and describe Morlet wavelets for time-frequency analysis. NeuroImage 2019, 199, 81–86. [Google Scholar] [CrossRef]
- Tang, Y. Mobile Communication De-noising Method Based on Wavelet Transform. In Proceedings of the International conference on Big Data Analytics for Cyber-Physical-Systems; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Gangsar, P.; Tiwari, R. Signal based condition monitoring techniques for fault detection and diagnosis of induction motors: A state-of-the-art review. Mech. Syst. Signal Process. 2020, 144, 106908. [Google Scholar] [CrossRef]
- Li, W.; Chen, J.; Li, J.; Xia, K. Derivative and enhanced discrete analytic wavelet algorithm for rolling bearing fault diagnosis. Microprocess. Microsyst. 2021, 82, 103872. [Google Scholar] [CrossRef]
- Gülcü, Ş. An improved animal migration optimization algorithm to train the feed-forward artificial neural networks. Arab. J. Sci. Eng. 2022, 47, 9557–9581. [Google Scholar] [CrossRef]
- Zhang, D. Fundamentals of Image Data Mining; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Xu, L.; Ding, F.; Zhu, Q. Hierarchical Newton and least squares iterative estimation algorithm for dynamic systems by transfer functions based on the impulse responses. Int. J. Syst. Sci. 2019, 50, 141–151. [Google Scholar] [CrossRef] [Green Version]
- Berwal, D.; Kumar, A.; Kumar, Y. Design of high performance QRS complex detector for wearable healthcare devices using biorthogonal spline wavelet transform. ISA Trans. 2018, 81, 222–230. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, R.; Agarwal, R.P.; Samet, B. A study of fractional Lotka-Volterra population model using Haar wavelet and Adams-Bashforth-Moulton methods. Math. Methods Appl. Sci. 2020, 43, 5564–5578. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, S.; Cheng, L. A 2D Daubechies wavelet model on the vibration of rectangular plates containing strip indentations with a parabolic thickness profile. J. Sound Vib. 2018, 429, 130–146. [Google Scholar] [CrossRef]
- Singh, A.; Rawat, A.; Raghuthaman, N. Mexican Hat Wavelet Transform and Its Applications. In Methods of Mathematical Modelling and Computation for Complex Systems; Springer: Berlin/Heidelberg, Germany, 2022; pp. 299–317. [Google Scholar]
- Sabir, Z.; Raja, M.A.Z.; Guirao, J.L.; Shoaib, M. A novel design of fractional Meyer wavelet neural networks with application to the nonlinear singular fractional Lane-Emden systems. Alex. Eng. J. 2021, 60, 2641–2659. [Google Scholar] [CrossRef]
- Cheng, L.; Li, D.; Li, X.; Yu, S. The optimal wavelet basis function selection in feature extraction of motor imagery electroencephalogram based on wavelet packet transformation. IEEE Access 2019, 7, 174465–174481. [Google Scholar] [CrossRef]
- Lu, W.; Song, L.; Cui, L.; Wang, H. A Novel Weak Fault Diagnosis Method Based on Sparse Representation and Empirical Wavelet Transform for Rolling Bearing. In Proceedings of the 2020 International Conference on Sensing, Measurement & Data Analytics in the Era of Artificial Intelligence (ICSMD), Xi’an, China, 15–17 October 2020. [Google Scholar]
- Liang, W.; Zhao, J. Multiscale modeling of large deformation in geomechanics. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 1080–1114. [Google Scholar] [CrossRef]
- Li, Y.; O’Neill, Z.; Zhang, L.; Chen, J.; Im, P.; De Graw, J. Grey-box modeling and application for building energy simulations-A critical review. Renew. Sustain. Energy Rev. 2021, 146, 111174. [Google Scholar] [CrossRef]
- Tsoulos, I.G.; Tzallas, A.; Karvounis, E. A Two-Phase Evolutionary Method to Train RBF Networks. Appl. Sci. 2022, 12, 2439. [Google Scholar] [CrossRef]
- Moody, J.; Darken, C.J. Fast learning in networks of locally-tuned processing units. Neural Comput. 1989, 1, 281–294. [Google Scholar] [CrossRef]
- Li, X.; Wang, H.; Wu, B. A stable and efficient technique for linear boundary value problems by applying kernel functions. Appl. Numer. Math. 2022, 172, 206–214. [Google Scholar] [CrossRef]
- Zhao, L.-Y.; Wang, L.; Yan, R.-Q. Rolling bearing fault diagnosis based on wavelet packet decomposition and multi-scale permutation entropy. Entropy 2015, 17, 6447–6461. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Jing, H.; Gao, Y.; Meng, Q.; Yin, Q.; Du, Y. Effects of carbon nanotube dosage and aggregate size distribution on mechanical property and microstructure of cemented rockfill. Cem. Concr. Compos. 2022, 127, 104408. [Google Scholar] [CrossRef]
- Ulger, T.; Okeil, A.M.; Elshoura, A. Load testing and rating of cast-in-place concrete box culverts. J. Perform. Constr. Facil. 2020, 34, 04020008. [Google Scholar] [CrossRef]
- Wu, J.; Jing, H.; Yin, Q.; Yu, L.; Meng, B.; Li, S. Strength prediction model considering material, ultrasonic and stress of cemented waste rock backfill for recycling gangue. J. Clean. Prod. 2020, 276, 123189. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, Z.; Zhang, J.; Zhang, R.; Ma, S. Multifactor Uncertainty Analysis of Construction Risk for Deep Foundation Pits. Appl. Sci. 2022, 12, 8122. [Google Scholar] [CrossRef]
- Agarwal, C.; D’souza, D.; Hooker, S. Estimating example difficulty using variance of gradients. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Layer Name | Layer Thickness/m | Unit Weight of Soil (kN/m2) | Modulus of Compressibility/MPa | Poisson’s Ratio | Cohesion/kPa | The Angle of Internal Friction/(°) |
|---|---|---|---|---|---|---|
| miscellaneous fill layer | 2.0~3.8 | 18 | 10 | 18 | ||
| Clayey and powdery soil layer | 2.2~4.2 | 18.4 | 6.7 | 0.480 | 14.2 | 25.4 |
| powdery sand with sandy and powdery soil | 5.1~8.8 | 19.4 | 11.5 | 0.484 | 5.6 | 33.2 |
| powdery sand layer | 5.1~7.8 | 19.0 | 10.9 | 0.486 | 7.8 | 30.7 |
| powdery and meticulous sand layer | 1.7~5.1 | 19.6 | 13.0 | 0.485 | 4.8 | 33.4 |
| Powdery silt | 2.9~6.2 | 17.4 | 3.4 | 0.485 | 22.8 | 15.6 |
| Powdery silt with sandy and powdery soil | 1.5~5.2 | 17.8 | 5.4 | 0.492 | 14.5 | 25.5 |
| sandy and powdery soil with powdery sand | 9.6~13.1 | 17.6 | 6.4 | 0.491 | 12.4 | 27.1 |
| Clayey and powdery soil layer with powdery sand | 11.2~17.1 | 17.7 | 9.0 | 0.484 | 10.2 | 28.7 |
| Model | Model Precision/mm | Average Error Rate/% | Maximum Error/mm |
|---|---|---|---|
| XW-RBF model | 0.13 | 0.77 | 0.47 |
| RBF model | 0.17 | 1.02 | 0.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Cheng, Z. Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis. Processes 2023, 11, 107. https://doi.org/10.3390/pr11010107
Zhang J, Cheng Z. Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis. Processes. 2023; 11(1):107. https://doi.org/10.3390/pr11010107
Chicago/Turabian StyleZhang, Jindong, and Zhangjianing Cheng. 2023. "Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis" Processes 11, no. 1: 107. https://doi.org/10.3390/pr11010107
APA StyleZhang, J., & Cheng, Z. (2023). Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis. Processes, 11(1), 107. https://doi.org/10.3390/pr11010107