
Design and Dynamic Characteristics Analysis of Novel Support Adjustment Mechanism of Wheeled Downhole Tractor

Abstract
:1. Introduction
2. Structure Design of DPRDSSAM
3. Dynamic Models of Novel WDR System
3.1. Dynamic Models of the Support Adjustment Mechanism
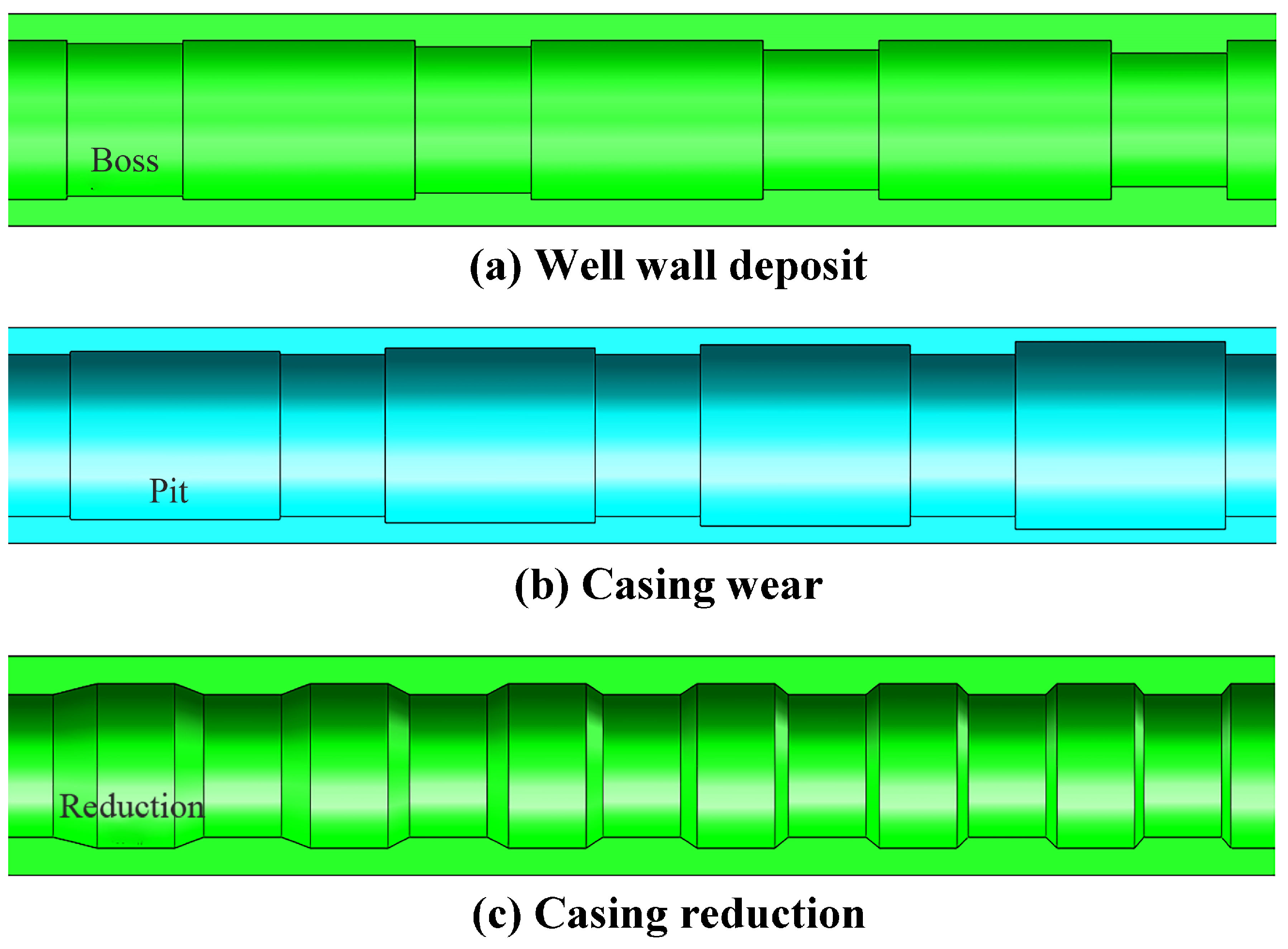
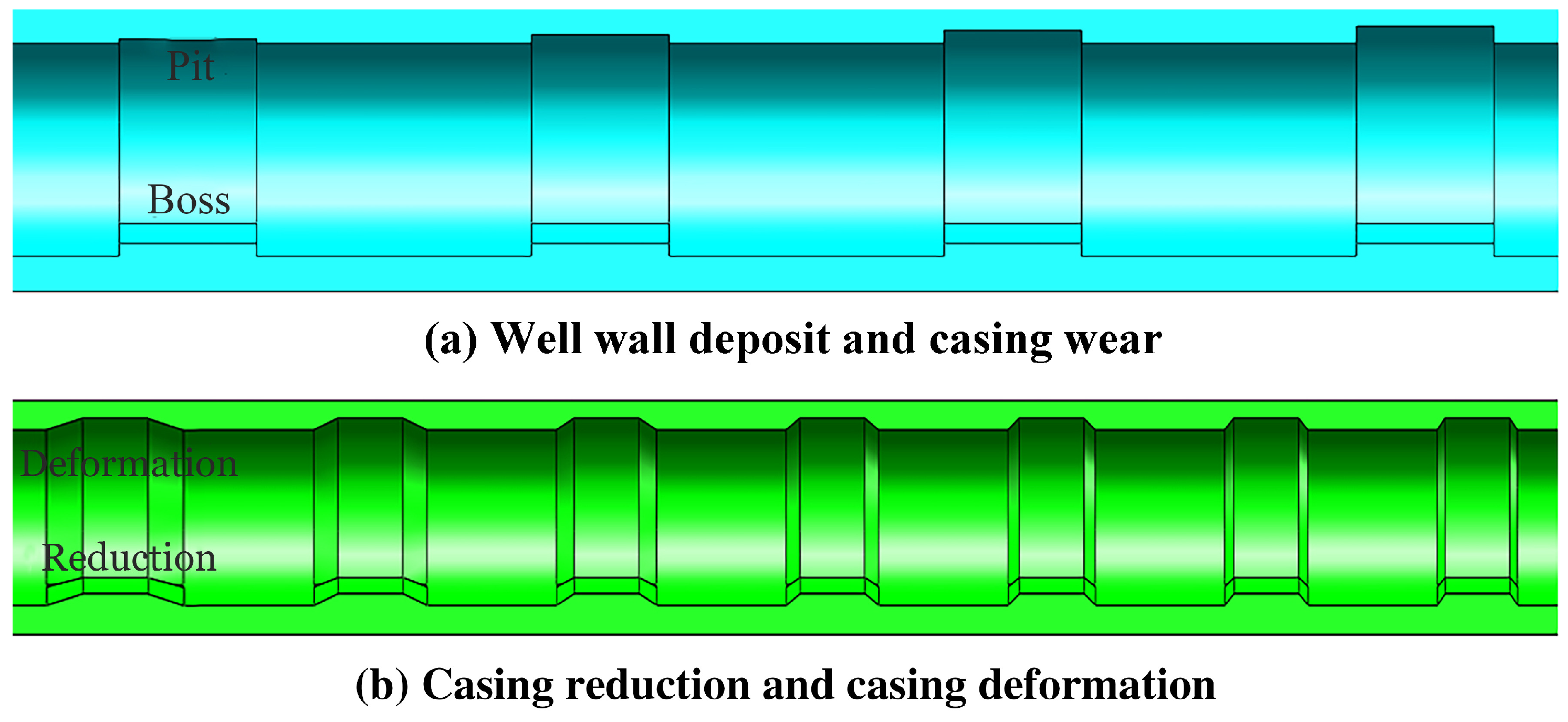
3.2. Models of Casing with Obstacle
4. Dynamic Characteristics of Support Adjustment Mechanism of WDR
4.1. Obstacle Surmounting Performance under Single Obstacle
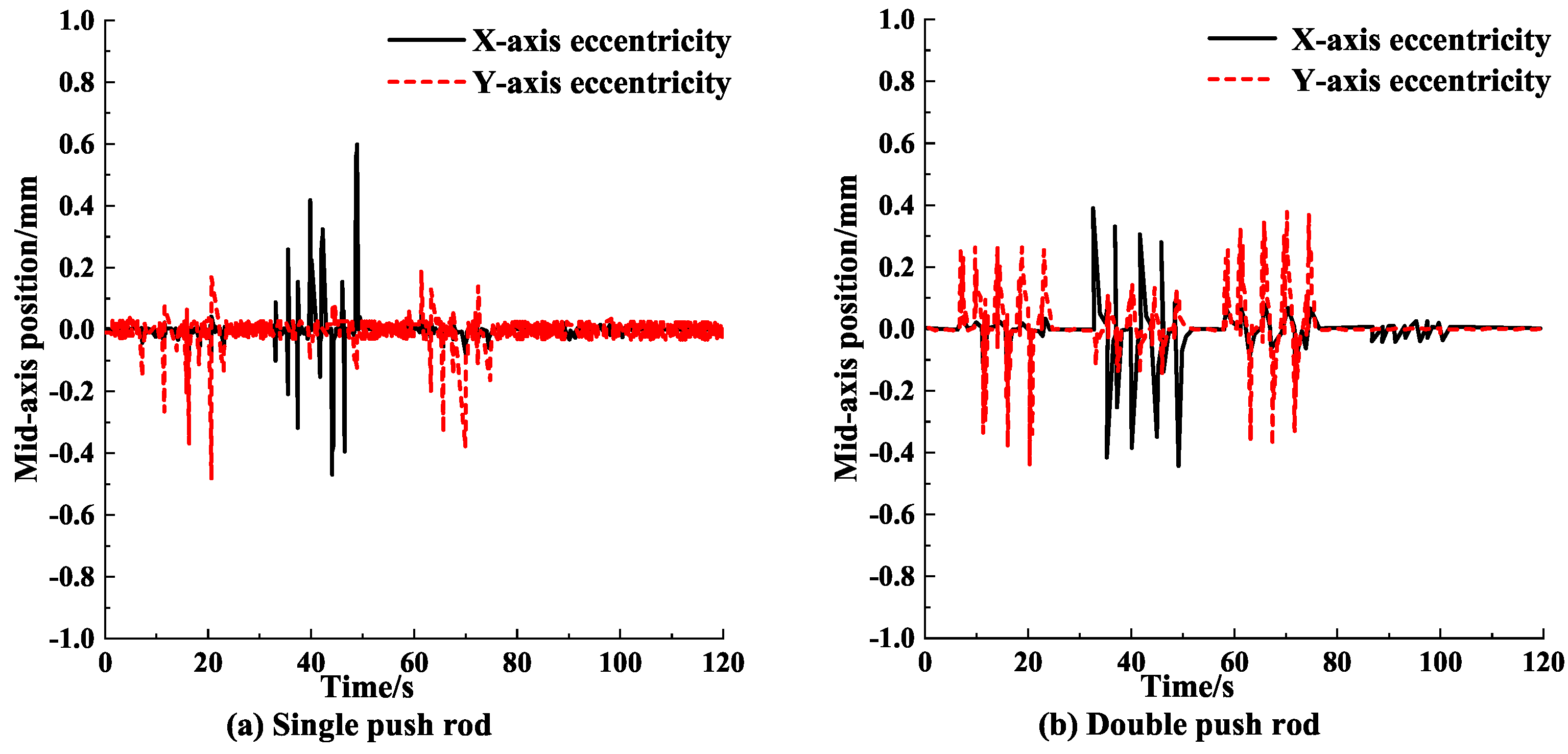
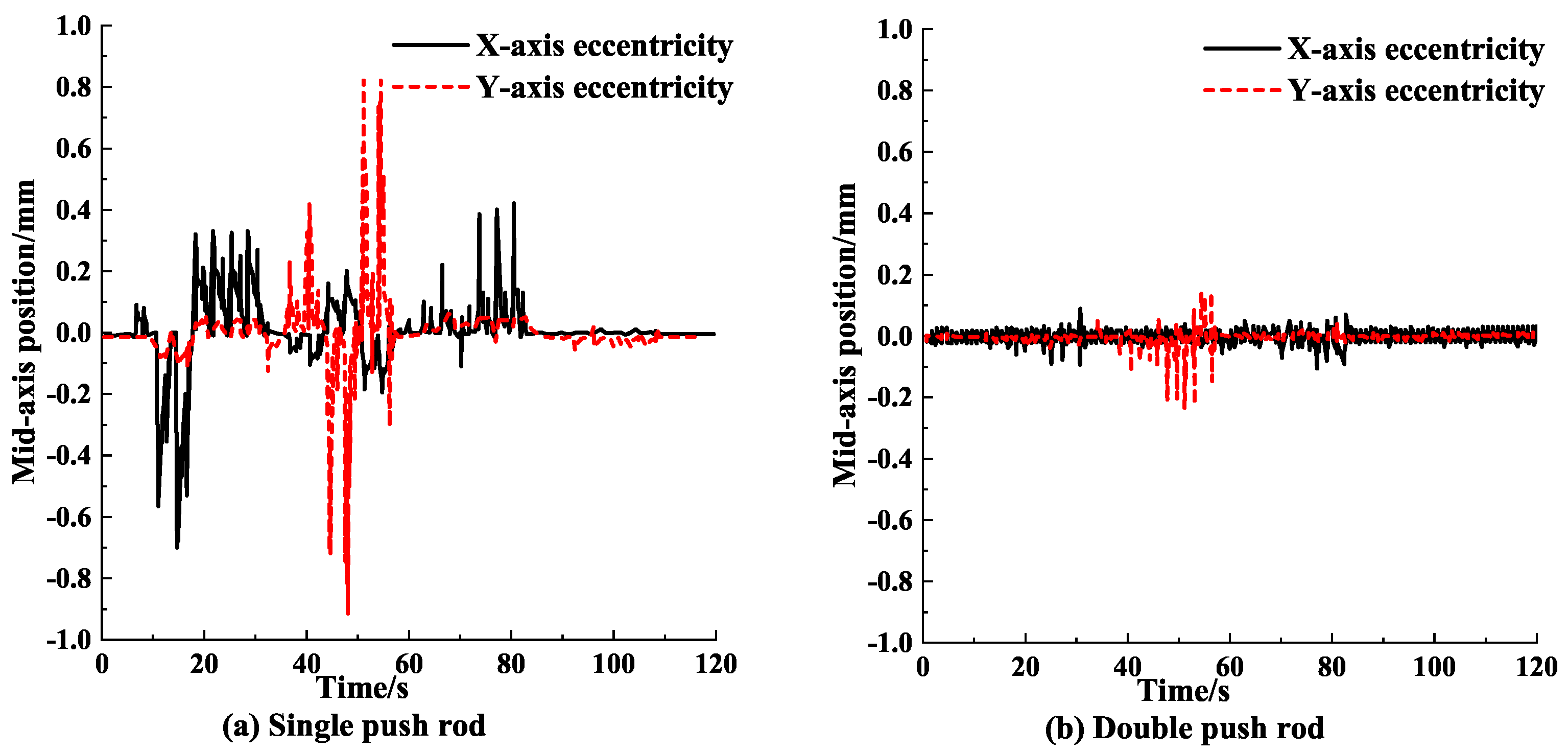
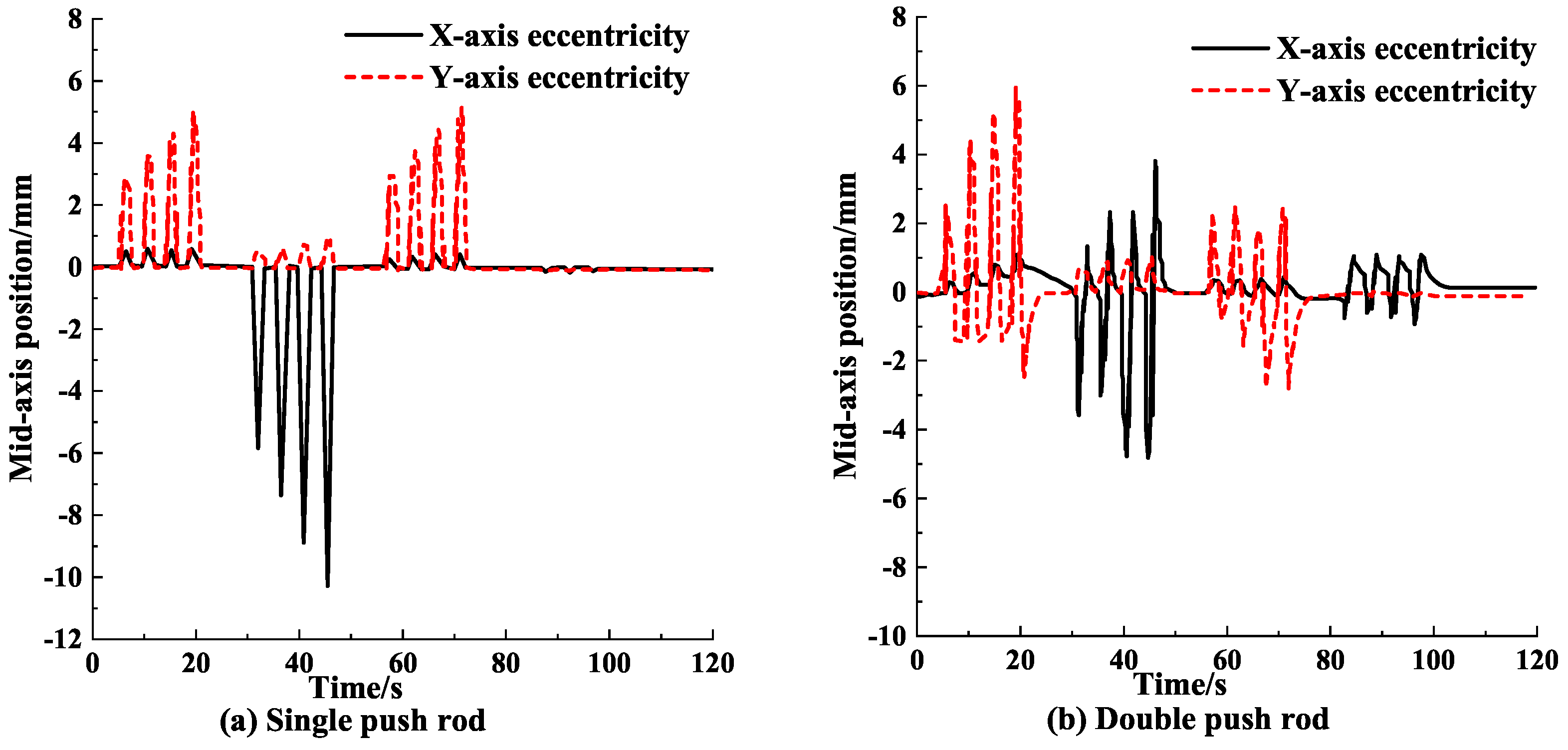
4.1.1. Mid-Axis Offset of Support Adjustment Mechanism under Single Obstacle
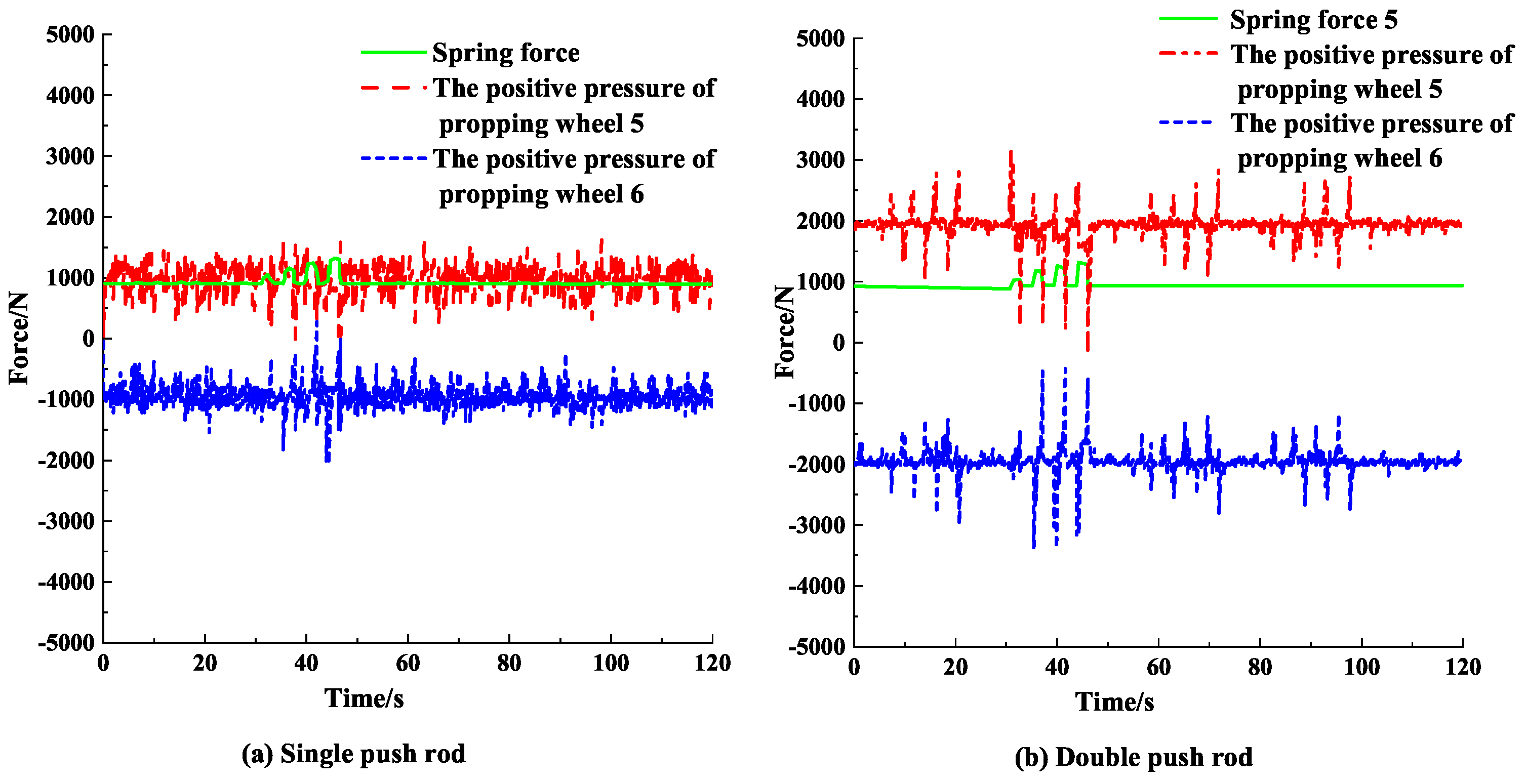
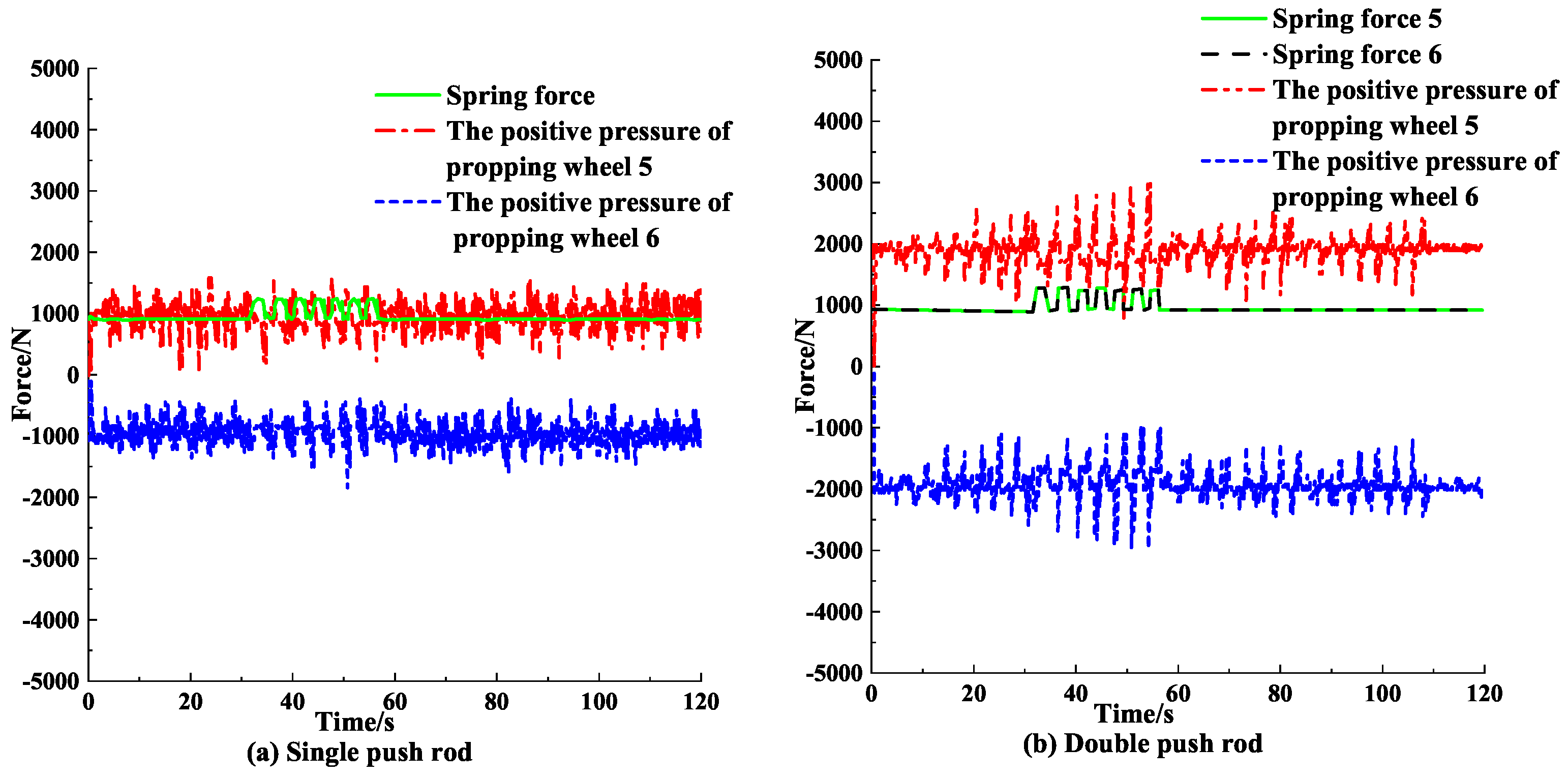
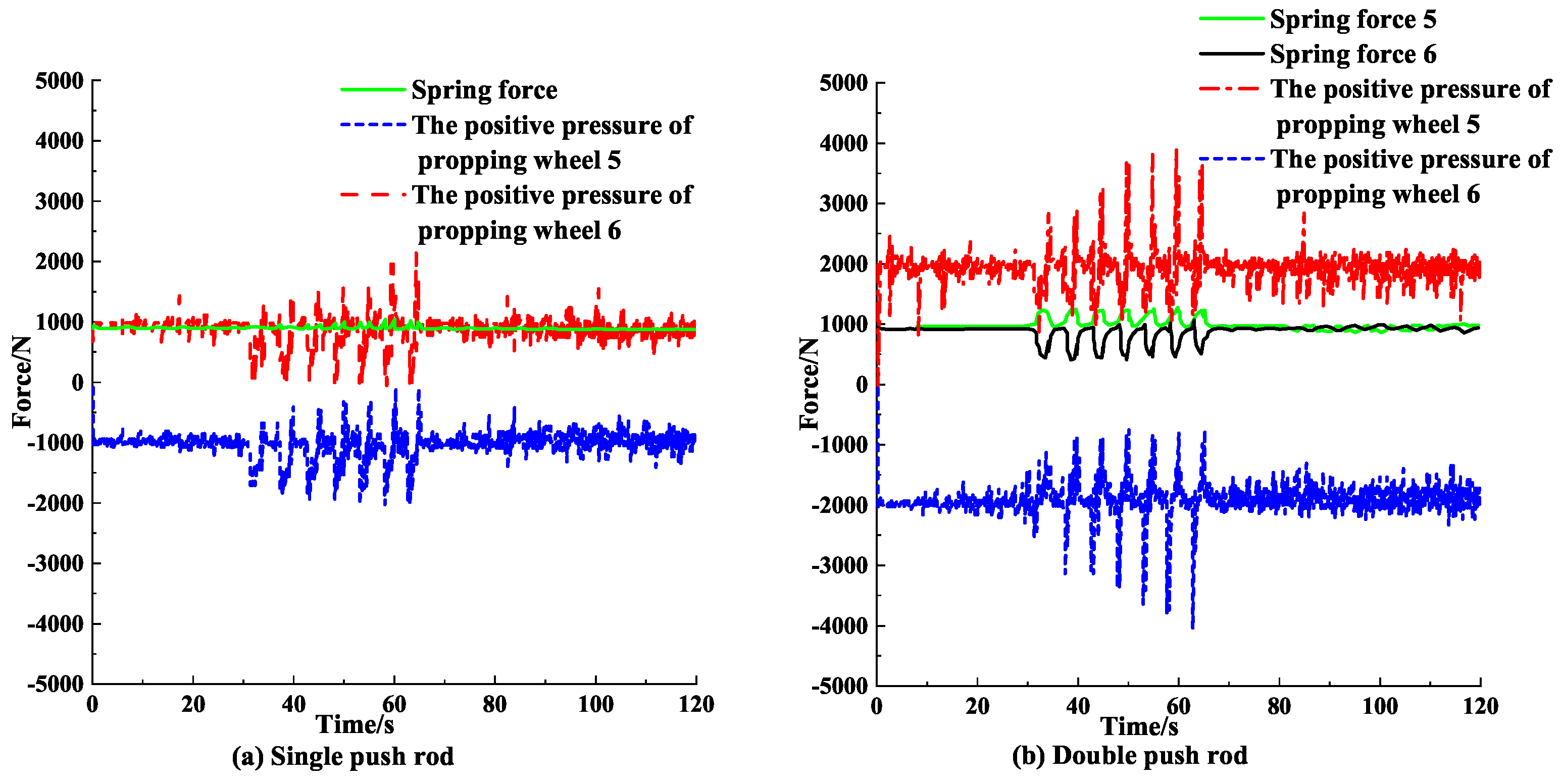
4.1.2. Positive Pressure of Support Adjustment Mechanism under Single Obstacle
4.2. Obstacle Surmounting Performance under Multiple Obstacles
4.2.1. Mid-Axis Offset of Support Adjustment Mechanism under Multiple Obstacles
4.2.2. Positive Pressure of Support Adjustment Mechanism under Multiple Obstacles
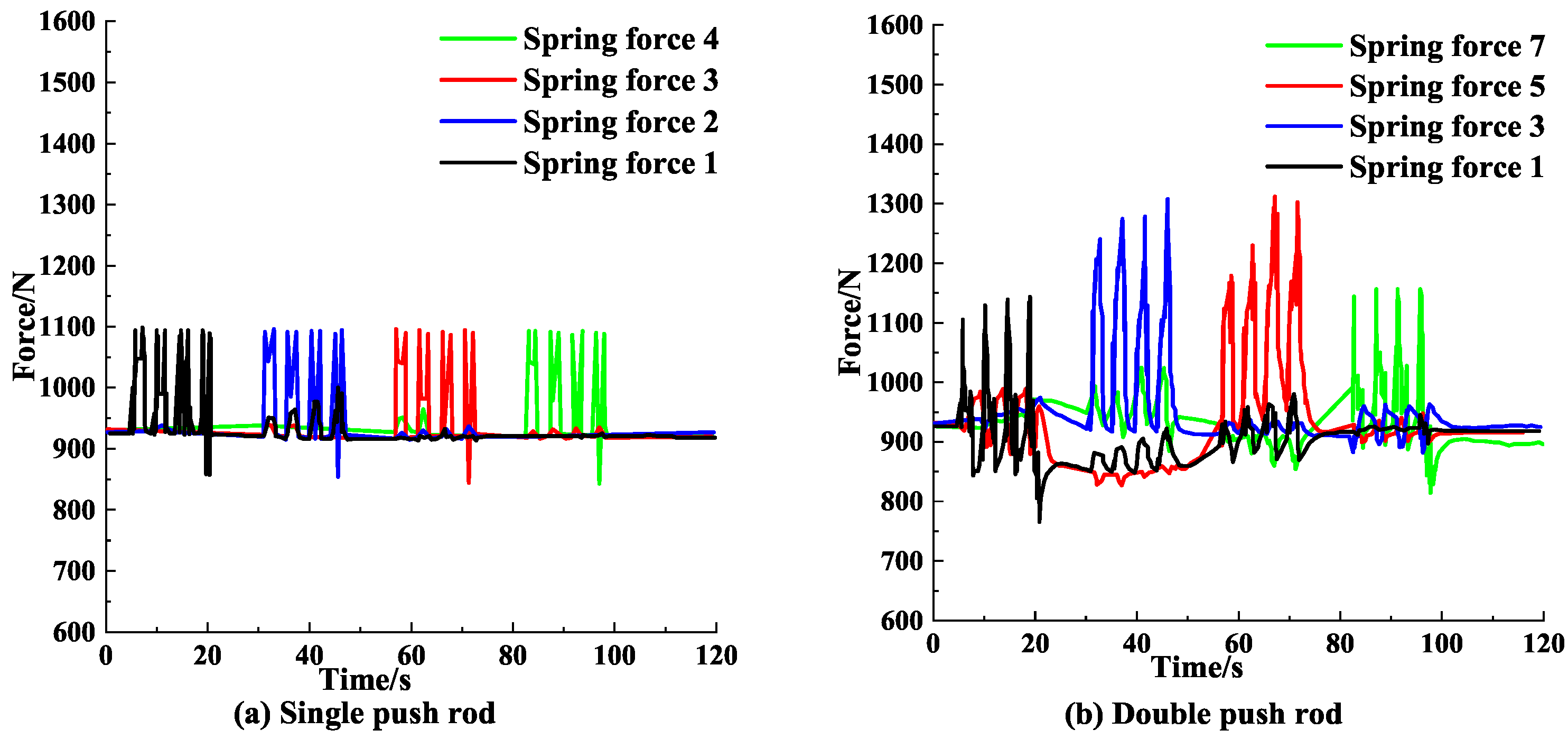
4.2.3. Spring Force of Support Adjustment Mechanism under Multiple Obstacles
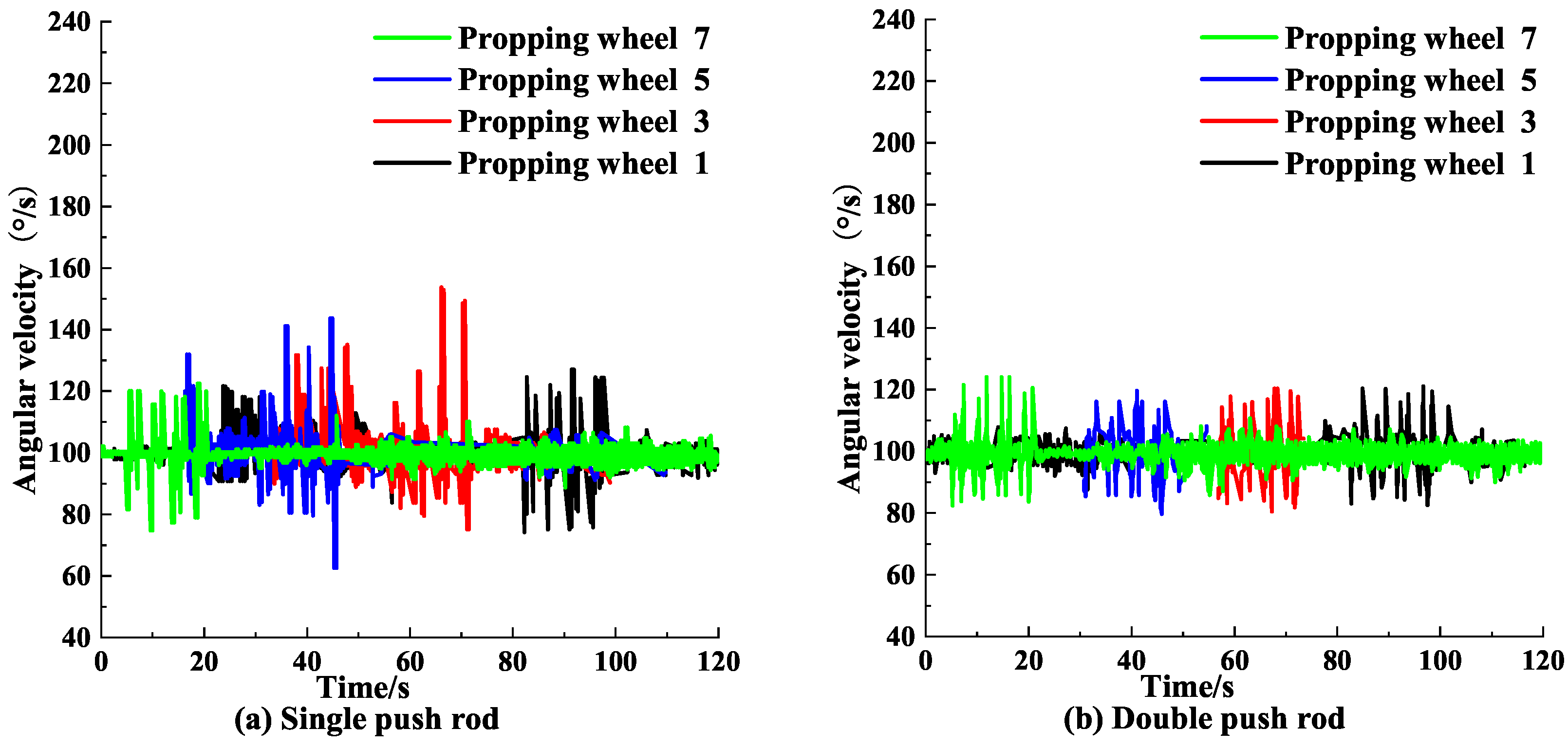
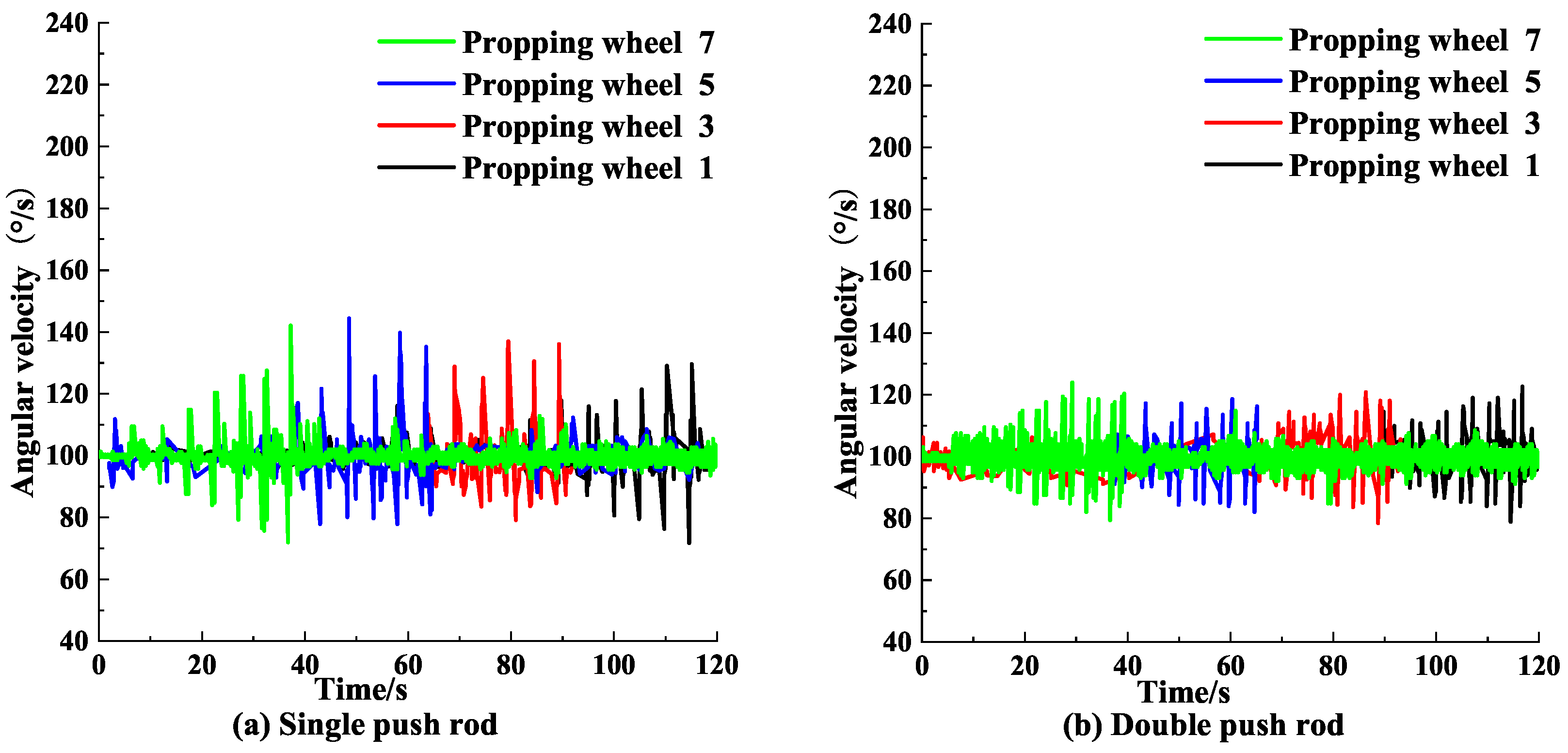
4.2.4. Angular Velocity of Support Adjustment Mechanism under Multiple Obstacles
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| WDR | wheeled downhole tractor |
| DPRDSSAM | double push rod-double spring support adjustment mechanism |
| SPRSAM | single push rod support adjustment mechanism |
References
- Shang, J.Z.; Fang, D.L.; Luo, Z.R.; Wang, R.; Li, X.; Yang, J.H. Design and analysis of a hydraulic drive downhole traction in-pipe robot based on flexible support structure. Proc. Inst. Mech. Eng. Part C. 2021, 235, 18–27. [Google Scholar] [CrossRef]
- Zhao, J.G.; Han, S.; Liu, Q.Y.; Zhang, Y.; Xiao, X.H.; Dong, R.; Fang, S.J.; Tu, C. Combined control mechanism of WOB and ROP with downhole robot in coiled tubing drilling process. SPE J. 2022, 27, 153–166. [Google Scholar] [CrossRef]
- Castillo, H.C.; Turner, D.R.; Smalley, E.A. Extreme production logging in long horizontal wells with high flow rates using downhole tractors. In Proceedings of the Onepetro SPE Annual Technical Conference and Exhibition, Denver, CO, USA, 21 September 2008. [Google Scholar]
- Tian, J.L.; Yang, Z.; Li, Y.; Yang, L.; Wu, C.M.; Liu, G.; Yuan, C.F. Vibration analysis of new drill string system with hydro-oscillator in horizontal well. J. Mech. Sci. Technol. 2016, 30, 2443–2451. [Google Scholar] [CrossRef]
- Dong, Y. Analysis of key technology and application of horizontal well production logging technology. Petrochem. Ind. Technol. 2017, 24, 125. [Google Scholar]
- Fang, D.L.; Shang, J.Z.; Liu, Y.Y.; Wu, W.; Luo, Z.R. Development of a drilling fluid drive downhole tractor in oil field. IOP Conf. Ser. Earth Environ. Sci. 2018, 111, 012007. [Google Scholar] [CrossRef] [Green Version]
- Gao, S.; Sun, W.; Ni, H.; Chang, Y.L. Status and understandings of downhole tractor design. J. Mach. Des. 2014, 31, 1–8. [Google Scholar]
- Saeed, A.; Duthie, L.; Yaklovlev, T.; Sagr, H. Development and world’s first field deployment of 2.125 tridem coiled tubing tractor for extended reach open hole horizontal wells with esp completions. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 13 November 2017. [Google Scholar]
- Tyagi, C.; Singh, V.; Nayak, J.P.; Pinto, T. Unique milling bit deployed via e-line intervention enables operator to achieve early production. In Proceedings of the SPE/ICoTA Coiled Tubing and Well Intervention Conference and Exhibition, Houston, TX, USA, 21–22 March 2017. [Google Scholar]
- Hou, X.J.; Gao, D.L.; Shen, Z.H. Structure design of coiled tubing tractor driven by motor in micro hole. Sci. Technol. Eng. 2013, 13, 1671–1815. [Google Scholar]
- Zhao, Q.M.; Fan, J.C.; Yan, D.; Tian, R.R.; Zhou, B.; Li, C. Development of downhole tools for stratified testing in oil and gas open-hole wells. Adv. Mat. Res. 2012, 422, 614–618. [Google Scholar] [CrossRef]
- Tan, L.C.; Gao, D.L. Casing wear prediction model based on casing ellipticity in oil and gas well-drilling with complex structures. J. Appl. Mech. 2018, 85, 101005. [Google Scholar] [CrossRef]
- Chen, L.F.; Gao, D.L.; Sun, T.F. Characteristics of process of surmounting obstacles by downhole tractors in horizontal shafts. Chem. Technol. Fuels Oil 2017, 53, 569–578. [Google Scholar] [CrossRef]
- Liu, Q.Y.; Zhao, J.G.; Zhu, H.Y.; Zheng, W.; Yang, Y.Q. A novel double bevel support structure for downhole robot. Arab. J. Sci. Eng. 2019, 44, 1069–1079. [Google Scholar] [CrossRef]
- Liu, Q.Y.; Zhao, J.G.; Zhu, H.Y.; Wang, G.R. Review, classification and structural analysis of downhole robots: Core technology and prospects for application. Rob. Auton. Syst. 2019, 115, 104–120. [Google Scholar] [CrossRef]
- Schwanitz, B.; Henriques, K. The development of wireline-tractor technology. Way Ahead. 2009, 5, 18–20. [Google Scholar] [CrossRef]
- Stuart-Bruges, W.P.; Searight, T.L.; Harris, N.G. Centralizer for Wireline Tools. U.S. Patent 7090007, 15 August 2006. [Google Scholar]
- Doering, F.W.; Sheiretov, T.K.; Ewan, R.A.; SSDD. Traction Control for Downhole Tractor. U.S. Patent 7143843, 5 December 2006. [Google Scholar]
- Sheiretov, T. Wireline tractors and mechanical services tools: Comparative study of technical solutions. In Proceedings of the SPE/ICoTA Coiled Tubing and Well Intervention Conference and Exhibition, Houston, TX, USA, 22–23 March 2016. [Google Scholar]
- Wang, C.C. Approximate boolean operations on large polyhedral solids with partial mesh reconstruction. IEEE Trans. Vis. Comput. Graph. 2010, 17, 836–849. [Google Scholar] [CrossRef] [PubMed]
- Phuoc, L.M.; Martinet, P.; Lee, S.; Kim, H. Damped least square based genetic algorithm with Ggaussian distribution of damping factor for singularity-robust inverse kinematics. J. Mech. Sci. Technol. 2008, 22, 1330–1338. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| Damping coefficient | 10 | Contact rigidity (N/mm) | 10 |
| Force index | 2.2 | Penetration depth (mm) | 0.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhao, X.; Wei, X.; Luo, X.; Dong, X. Design and Dynamic Characteristics Analysis of Novel Support Adjustment Mechanism of Wheeled Downhole Tractor. Processes 2023, 11, 140. https://doi.org/10.3390/pr11010140
Zhao J, Zhao X, Wei X, Luo X, Dong X. Design and Dynamic Characteristics Analysis of Novel Support Adjustment Mechanism of Wheeled Downhole Tractor. Processes. 2023; 11(1):140. https://doi.org/10.3390/pr11010140
Chicago/Turabian StyleZhao, Jianguo, Xin Zhao, Xiaohan Wei, Xu Luo, and Xuecheng Dong. 2023. "Design and Dynamic Characteristics Analysis of Novel Support Adjustment Mechanism of Wheeled Downhole Tractor" Processes 11, no. 1: 140. https://doi.org/10.3390/pr11010140