



Comfort Optimization of the Active Collision Avoidance Control System of Electric Vehicles for Green Manufacturing


Abstract
:1. Introduction
2. Conceptual Design
2.1. Software in the Loop Test Scheme Design
2.1.1. The First Section
2.1.2. The Construction of the Traffic Scenarios
2.1.3. Joint Control Interface with the Simulink
2.2. Control Method Design of Longitudinal Active Collision Avoidance System Based on MPC
2.2.1. Construction of Vehicle Model
2.2.2. Algorithm Construction of Active Collision Avoidance Control System
Active Collision Avoidance Control Target Analysis
Robust Design of Car following Model Prediction
Constrained Optimization Problem
Solving Constrained Optimization Problems
3. Simulation Analysis
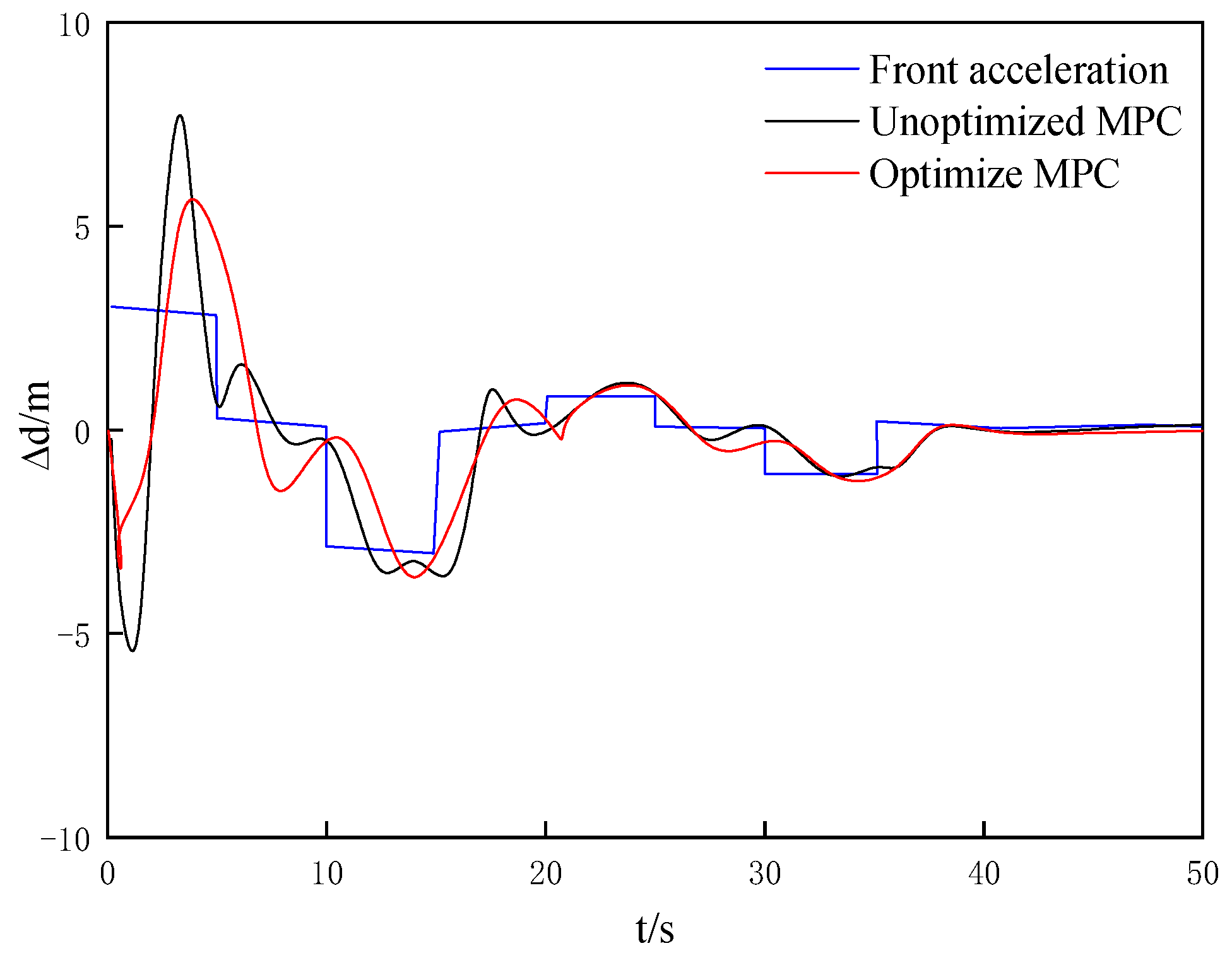
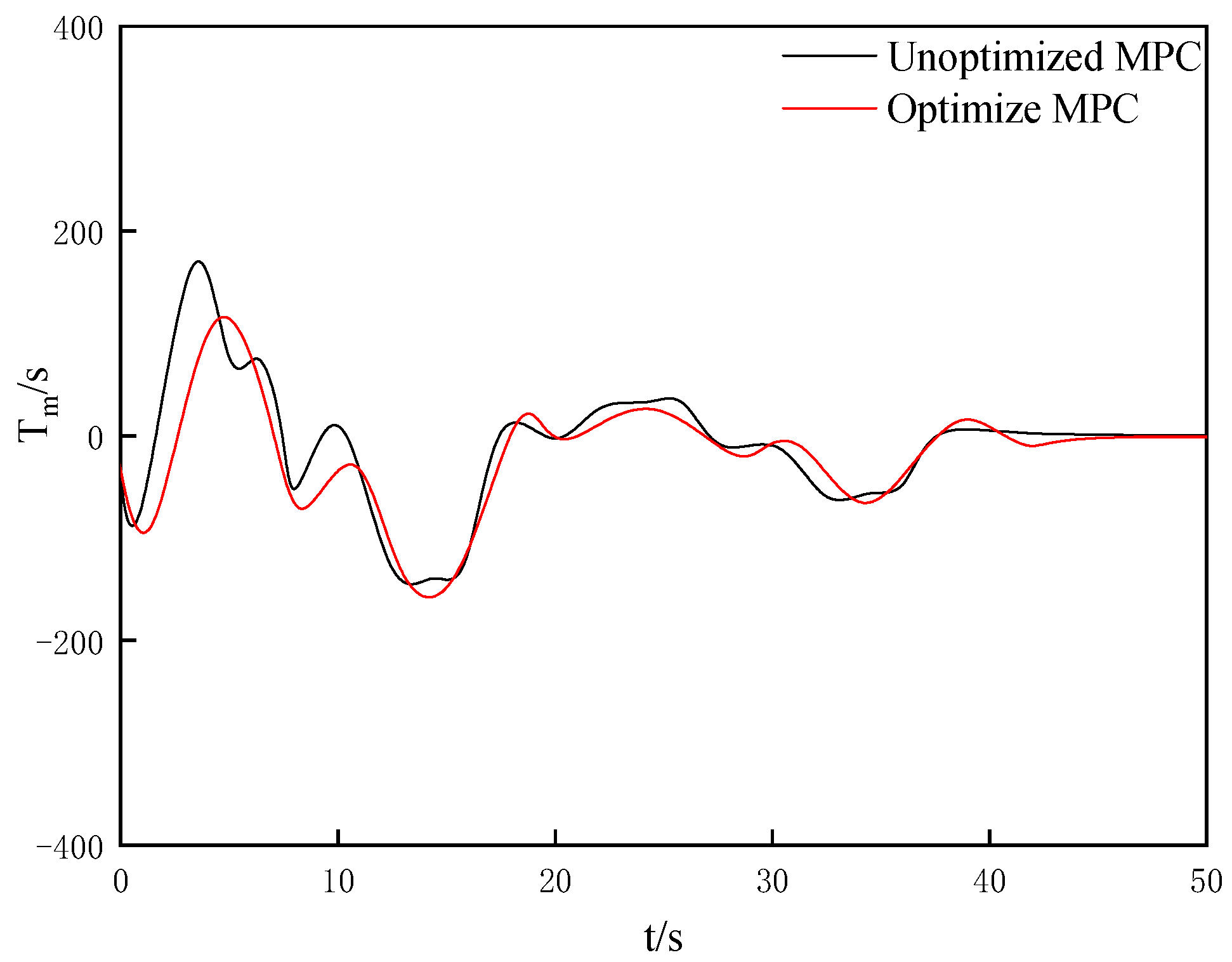
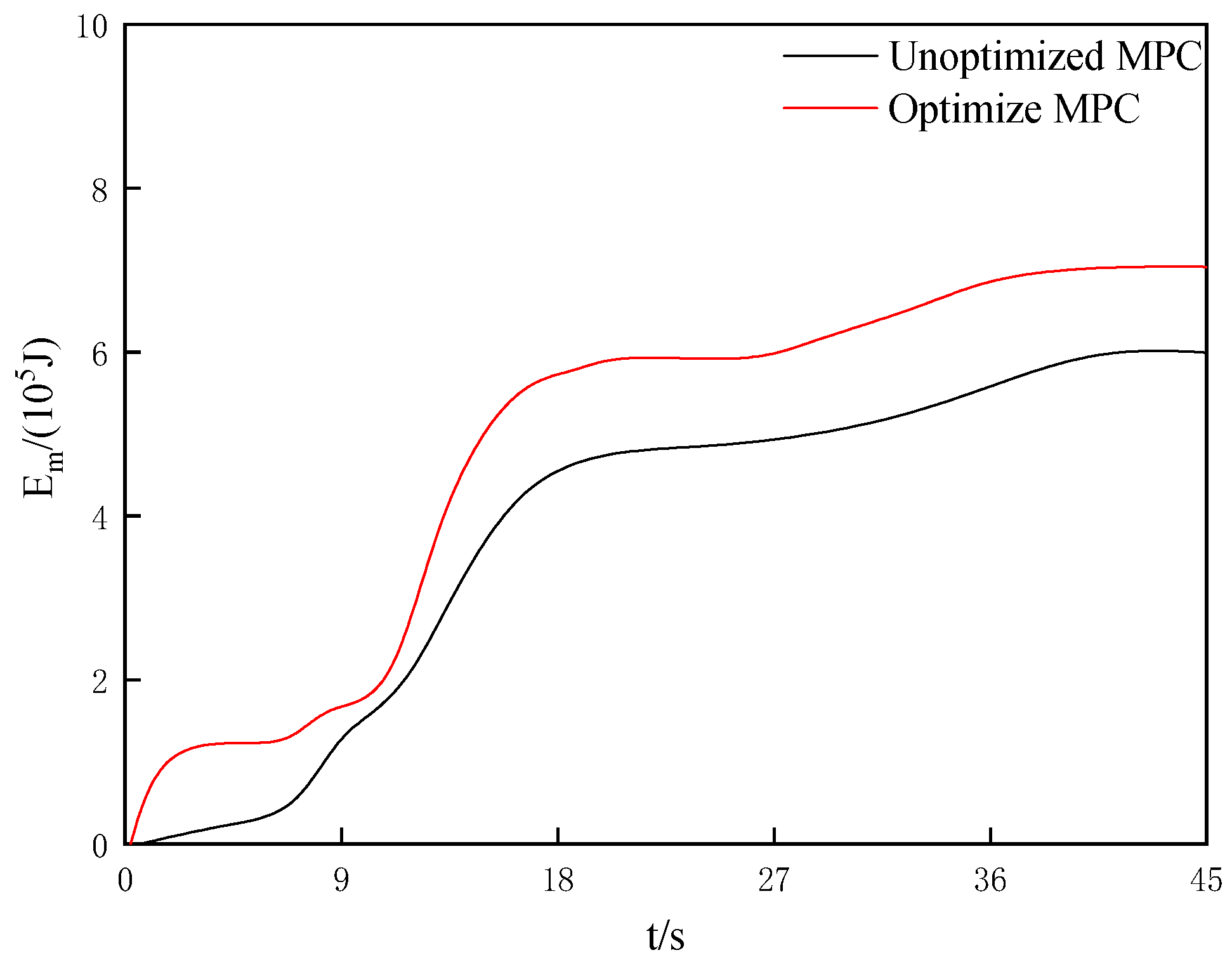
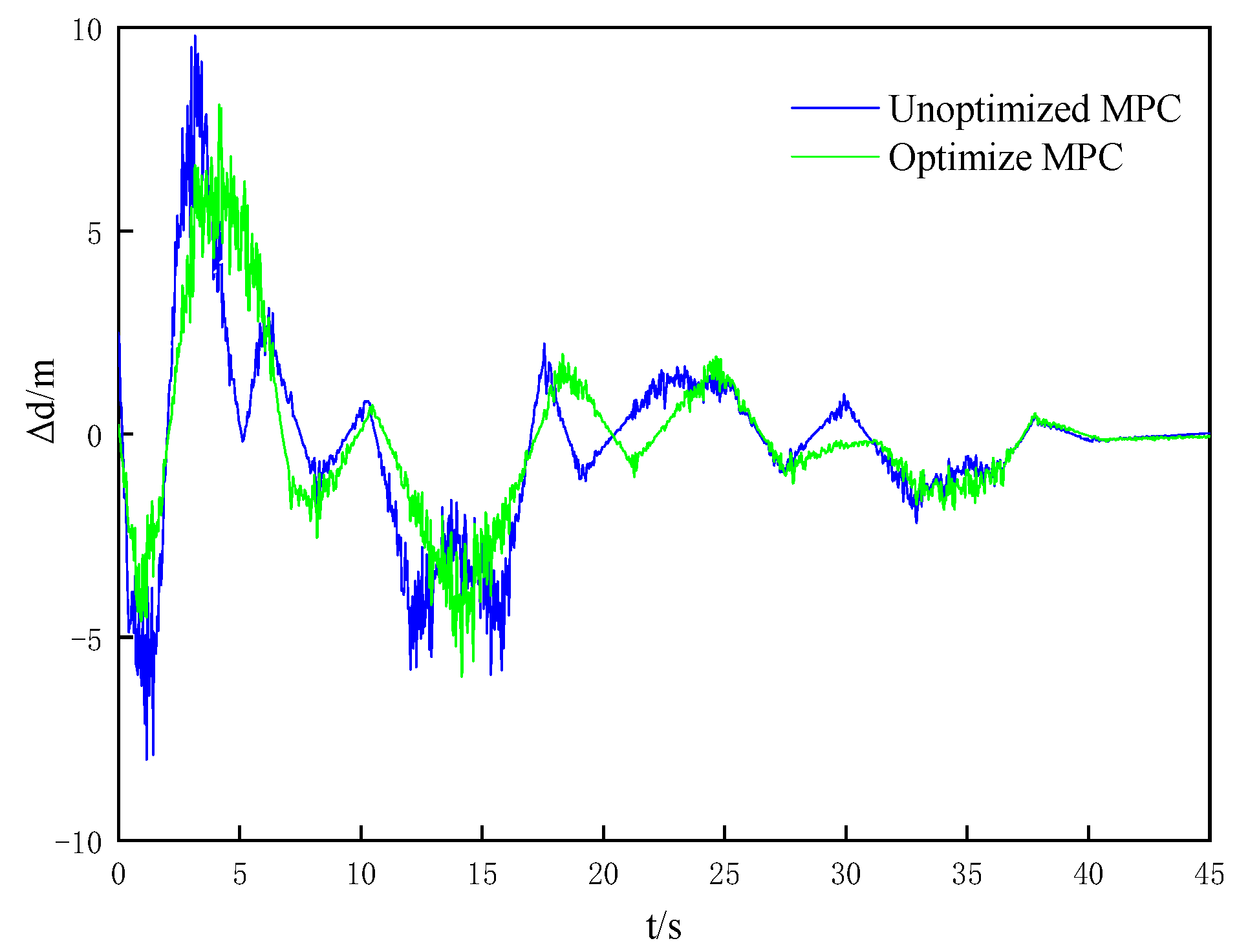
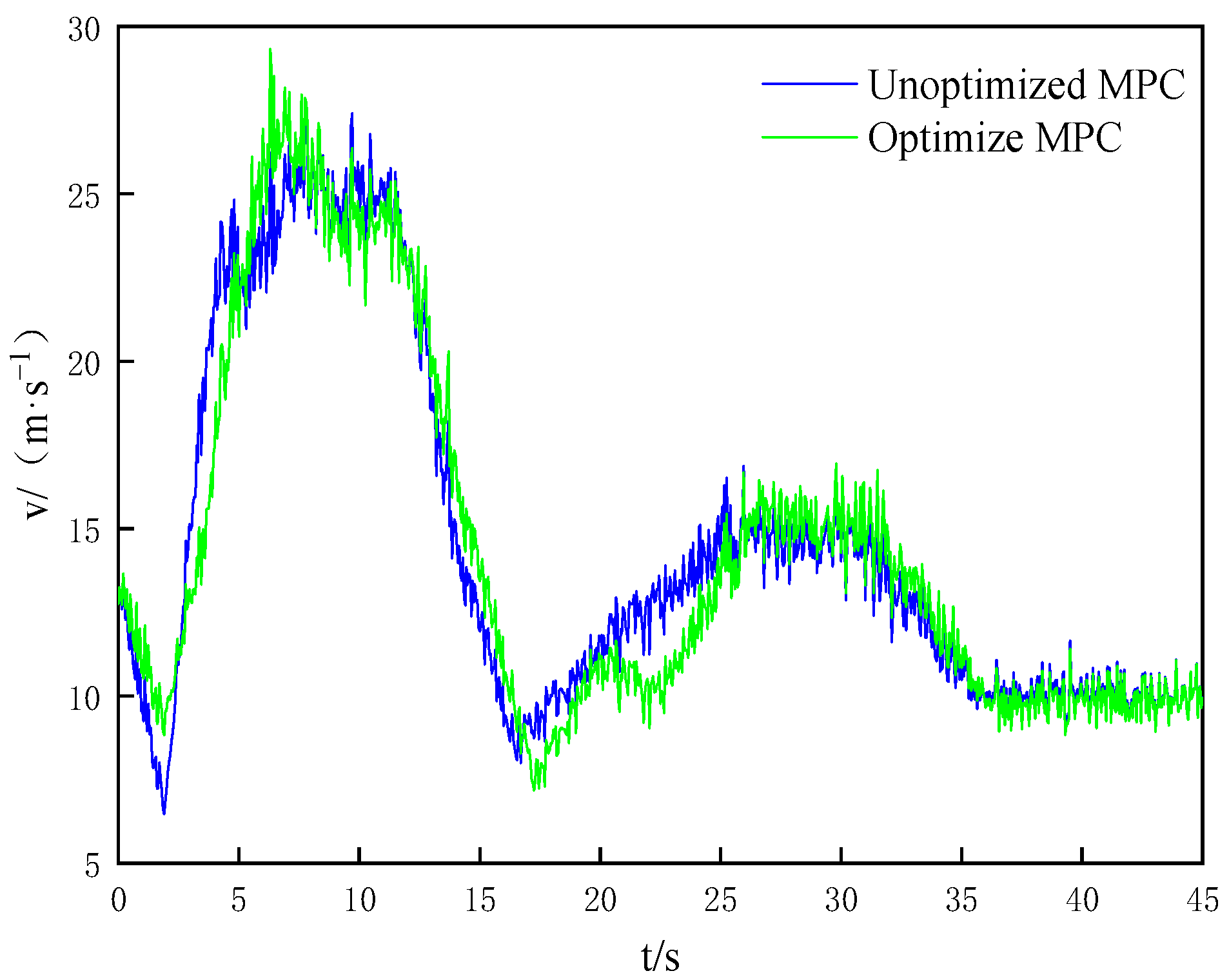
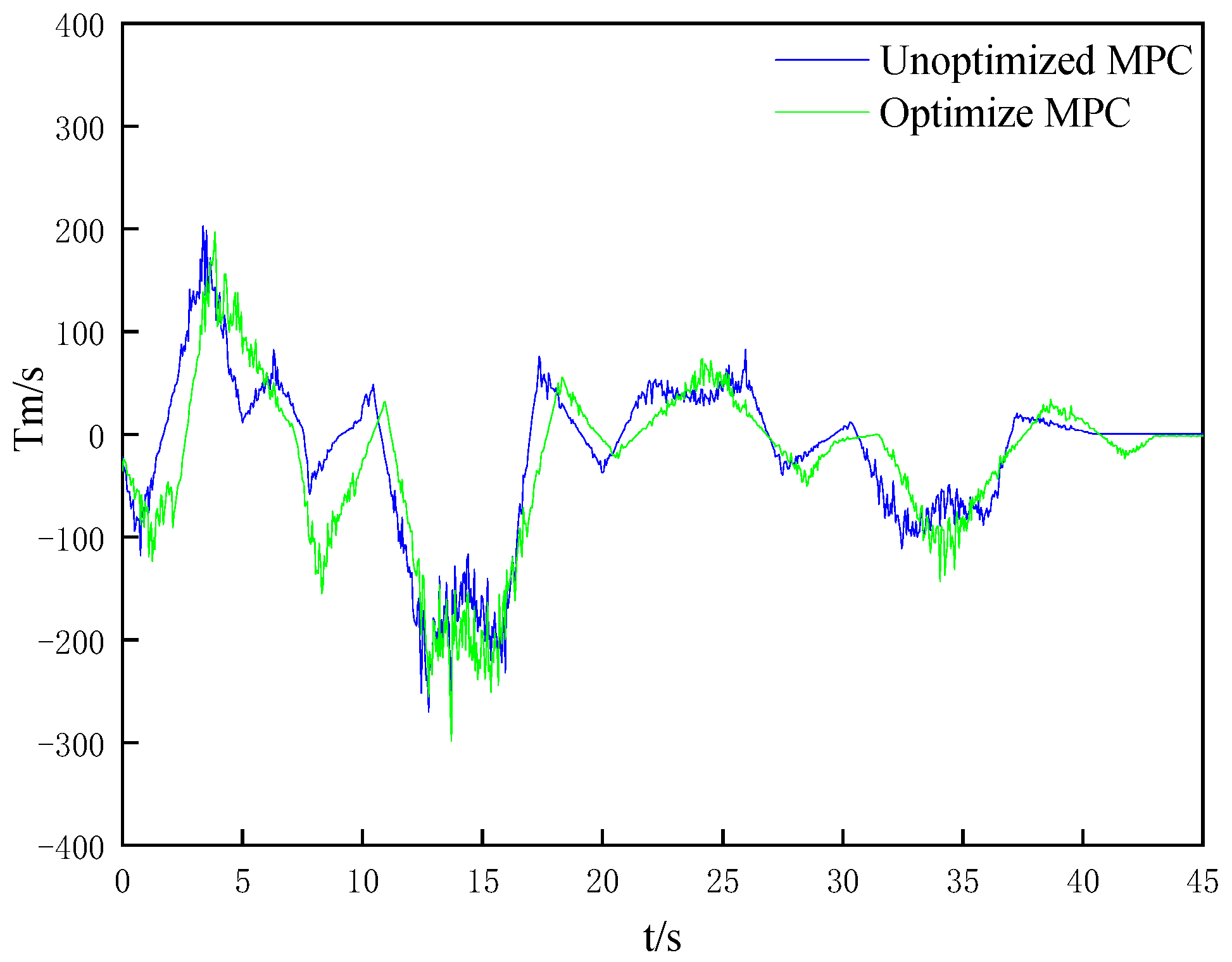
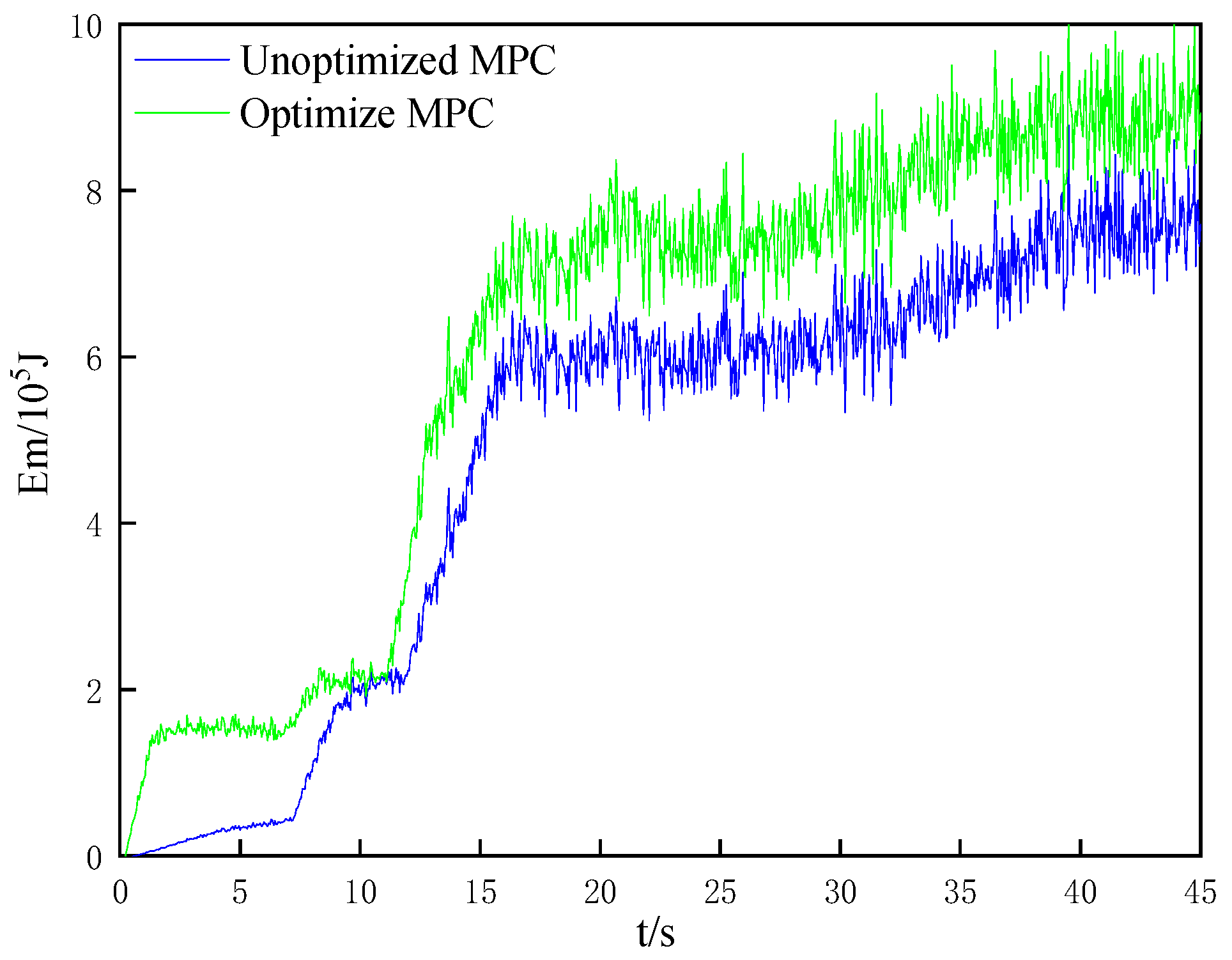
4. Analysis of Test Results
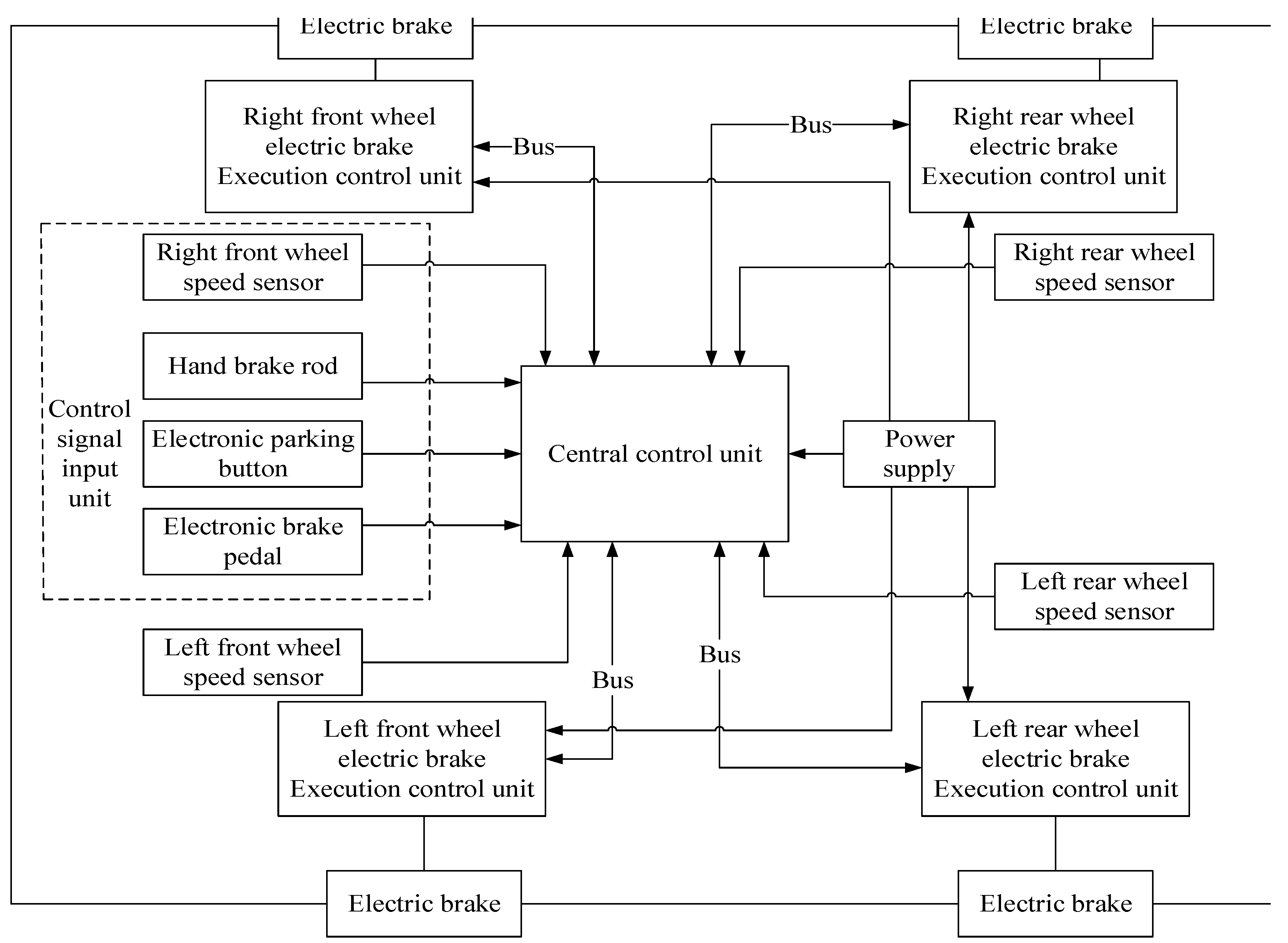
4.1. Real Vehicle Experimental Platform
4.2. Sensor
4.2.1. Wheel Speed Sensor
4.2.2. Acceleration Sensor
4.2.3. Braking Pressure Sensor
4.2.4. Actuator of Active Braking System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Wang, C.; Zhao, W.; Feng, J. Longitudinal and lateral collision avoidance control strategy for intelligent vehicles. J. Automob. Eng. 2022, 236, 09544070211024048. [Google Scholar] [CrossRef]
- Yuan, C.; Lv, S.; Shen, J.; Chen, L.; He, Y.; Weng, S. Research on emergency collision avoidance system of man-machine cooperative driving vehicles based on additional yaw moment control. IEEE Access 2022, 10, 51757–51770. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Zheng, T.; Zhang, H. Emergency collision avoidance strategy for autonomous vehicles based on steering and differential braking. Res. Sq. 2022, 1, 10–18. [Google Scholar] [CrossRef]
- Han, W.; Zhu, Q.; Liu, Y.; Zhao, J.; Chen, Y. Reinforce learning-based collision avoidance in network assisted automated driving. Res. Sq. 2022, 1, 4–17. [Google Scholar]
- Kao, I.; Yian, Y.; Su, J.; Lai, Y.; Perng, J.; Hsieh, T.; Tsai, Y.; Hsieh, M. Design of sensor fusion driver assistance system for active pedestrian safety. arXiv 2022, arXiv:2201.09208. [Google Scholar]
- Hong, J.; Ma, F.; Xu, X.; Yang, J.; Zhang, H. A novel mechanical-electric-hydraulic power coupling electric vehicle considering different electrohydraulic distribution ratios. Energy Convers. Manag. 2021, 249, 114870. [Google Scholar] [CrossRef]
- Sun, C.; Zheng, S.; Ma, Y. An active safety control method of collision avoidance for intelligent connected vehicle based on driving risk perception. J. Intell. Manuf. 2021, 32, 1249–1269. [Google Scholar] [CrossRef]
- Cao, Y.; Wen, J.; Ma, L. Tracking and collision avoidance of virtual coupling train control system. Future Gener. Comput. Syst. 2021, 120, 76–90. [Google Scholar] [CrossRef]
- Du, L.; Ji, J.; Zhang, D.; Zheng, H.; Chen, W. A fuzzy drive strategy for an intelligent vehicle controller unit integrated with connected data. Machines 2021, 9, 215. [Google Scholar] [CrossRef]
- Feng, S.; Qian, Y.; Wang, Y. Collision avoidance method of autonomous vehicle based on improved artificial potential field algorithm. J. Automob. Eng. 2021, 235, 3416–3430. [Google Scholar] [CrossRef]
- Ahangarnejad, A.H.; Radmehr, A.; Ahmadian, M. A review of vehicle active safety control methods: From antilock brakes to semiautonomy. J. Vib. Control 2021, 27, 1683–1712. [Google Scholar] [CrossRef]
- Li, K.; Zhang, R.; Wang, H.; Yu, F. Multi-intelligent connected vehicle longitudinal collision avoidance control and exhaust emission evaluation based on parallel theory. Process Saf. Environ. Prot. 2021, 150, 259–268. [Google Scholar] [CrossRef]
- Mao, J.; Yang, L.; Hu, Y.; Liu, K.; Du, J. Research on vehicle adaptive cruise control method based on fuzzy model predictive control. Machines 2021, 9, 160. [Google Scholar] [CrossRef]
- Tian, G.; Fathollahi-Fard, A.; Ren, Y.; Li, Z.; Jiang, X. Multi-objective scheduling of priority-based rescue vehicles to extinguish forest fires using a multi-objective discrete gravitational search algorithm. Inf. Sci. 2022, 608, 578–589. [Google Scholar] [CrossRef]
- Narayanan, P.; Sengan, S.; Marimuthu, B.; Paulra, R.; Bhargava, C.; Sharma, P.; Kumar, K.; Dadheech, P. Analysis and design of fuzzy-based manoeuvring model for mid-vehicle collision avoidance system. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 9909–9922. [Google Scholar] [CrossRef]
- Tian, G.; Zhang, C.; Fathollahi-Fard, A.; Li, Z.; Zhang, C.; Jiang, Z. An enhanced social engineering optimizer for solving an energy-efficient disassembly line balancing problem based on bucket brigads and cloud theory. IEEE Trans. Ind. Inform. 2022, 2–11. [Google Scholar] [CrossRef]
- Qin, J.X.; Deng, W.W.; He, R. Intelligent vehicle collision risk modeling and comprehensive evaluation method. In Proceedings of the 2019 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 21–22 September 2019; Volume 9, pp. 100–110. [Google Scholar]
- Yuan, W.; Yang, G.; Fu, R. Effect of driver inhibitory control on risk driving behavior. Automot. Eng. 2021, 43, 4132–4163. [Google Scholar]
- Tian, G.; Yuan, G.; Aleksandrov, A.; Zhang, T.; Li, Z.; Fathollahi-Fard, A.M.; Ivanov, M. Recycling of spent Lithium-ion batteries: A comprehensive review for identification of main challenges and future research trends. Sustain. Sustain. Energy Technol. Assess. 2022, 53, 102447. [Google Scholar] [CrossRef]
- Li, J. Study of Intelligent Vehicle Driving Control Switching and Evaluation Method Considering Driving Style; Jilin University: Jilin, China, 2021. [Google Scholar]
- Wang, Y.; Sun, W.; Lu, Y. Research on Application in Intelligent Vehicle Automatic Control System; IOP Publishing: Bristol, UK, 2021; Volume 1828, p. 012046. [Google Scholar]
- Xu, Y.; Chu, L.; Zhao, D. A novel adaptive cruise control strategy for electric vehicles based on a hierarchical framework. Machines 2021, 9, 263. [Google Scholar] [CrossRef]
- Deng, G.; Zhang, X.; Song, H. Design of car-following algorithms for cooperative adaptive cruise controlsyste. J. Chongqing Univ. Technol. 2019, 33, 32–37. [Google Scholar]
- Tian, G.; Ren, Y.; Feng, Y.; Zhou, M.; Zhang, H.; Tan, J. Modeling and planning for dual-objective selective disassembly using or graph and discrete artificial bee colony. IEEE Trans. Insdustrial Inform. 2018, 15, 2456–2468. [Google Scholar] [CrossRef]
- Liang, W.; Ahmac, E.; Khan, M.A.; Youn, I. Integration of active tilting control and full-wheel steering control system on vehicle lateral performance. Springer Link 2021, 22, 979–992. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A survey of driving safety with sensing, vehicular communications, and artificial intelligence-based collision avoidance. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6142–6163. [Google Scholar] [CrossRef]
- Liu, Y.; Tan, J. Experimental study on solid SCR technology to reduce no emissions from diesel engines. IEEE Access 2020, 8, 151106–151115. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, G.; Li, Y.; Ullah, S.; Zhuang, W.; Wang, J.; Zhang, N.; Geng, K. Self-learning control for coordinated collision avoidance of automated vehicles. J. Automob. Eng. 2021, 235, 1149–1163. [Google Scholar] [CrossRef]
- Ke, H.; Liu, H.; Tian, G. An uncertain random programming model for project scheduling problem. Int. J. Intell. Syst. 2015, 30, 66–79. [Google Scholar] [CrossRef]
- Tian, G.; Chu, J.; Liu, Y.; Ke, H.; Zhao, X.; Xu, G. Expected energy analysis for industrial process planning problem with fuzzy time parameters. Conputers Chem. Eng. 2011, 35, 2905–2912. [Google Scholar] [CrossRef]
- Hang, P.; Xia, X.; Chen, G.; Chen, X. Active safety control of automated electric vehicles at driving limits: A tube-based MPC approach. IEEE Trans. Transp. Electrif. 2021, 8, 1338–1349. [Google Scholar] [CrossRef]
- Li, N.; Liu, Y.; Tan, S. Experimental research on braking feedback and taxiing feedback system of new energy vehicles. Appl. Sci. 2021, 11, 11093. [Google Scholar] [CrossRef]
- Li, N.; Liu, Y.; Zhang, J. Research on energy consumption evaluation of electric vehicles for thermal comfort. Environ. Sci. Pollut. Res. 2022, 1–13. [Google Scholar] [CrossRef]
- Li, N.; He, C.; Zhang, J. Research on the Influence of Air Conditioning Energy Consumption on Brake Energy Recovery Contribution Rate Based on Operating Conditions; IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 638, p. 012018. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Parameter | Symbol | Figure | Unit |
|---|---|---|---|---|
| 1 | Wheel rolling radius | r | 0.275 | m |
| 2 | Wheel rotation inertia | IW | 1 | kg/m2 |
| 3 | Total mass of the car | m | 1360 | kg |
| 4 | Wheelbase | L | 2.33 | m |
| 5 | The distance from the | |||
| front axle to the | a | 1.0657 | m | |
| center of mass | ||||
| 6 | The distance from the | |||
| rear axle to the center | b | 1.2643 | m | |
| of mass | ||||
| 7 | Centroid height | h | 0.627 | m |
| 8 | Drag coefficient | CD | <0.32 | |
| 9 | Reducer gear ratio | i | 3.5 | |
| 10 | Windward area | A | 2.142 | m2 |
| Name | Parameter |
|---|---|
| L × W × H (mm) | 4600 × 1780 × 1445 |
| Wheelbase (mm) | 2700 |
| Tread front (mm) | 1555 |
| Tread rear (mm) | 1568 |
| Complete vehicle quality (kg) | 1235 |
| Tire size | 195/65 R15 |
| Full speed (km/h) | 190 |
| Name | Parameter |
|---|---|
| Motor back EMF coefficient | 0.104 |
| Worm-gear drive ratio | 25 |
| Mechanical efficiency of worm gear | 0.95 |
| Ball screw guide (m) | 0.008 |
| Mechanical efficiency of ball screw | 0.95 |
| Braking coefficient | 0.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Liu, Y.; Zhang, T.; Yang, Y.; Wang, C.; Wang, X. Comfort Optimization of the Active Collision Avoidance Control System of Electric Vehicles for Green Manufacturing. Processes 2023, 11, 485. https://doi.org/10.3390/pr11020485
Li N, Liu Y, Zhang T, Yang Y, Wang C, Wang X. Comfort Optimization of the Active Collision Avoidance Control System of Electric Vehicles for Green Manufacturing. Processes. 2023; 11(2):485. https://doi.org/10.3390/pr11020485
Chicago/Turabian StyleLi, Ning, Yingshuai Liu, Tengfei Zhang, Yongqi Yang, Chunlin Wang, and Xinzhi Wang. 2023. "Comfort Optimization of the Active Collision Avoidance Control System of Electric Vehicles for Green Manufacturing" Processes 11, no. 2: 485. https://doi.org/10.3390/pr11020485
APA StyleLi, N., Liu, Y., Zhang, T., Yang, Y., Wang, C., & Wang, X. (2023). Comfort Optimization of the Active Collision Avoidance Control System of Electric Vehicles for Green Manufacturing. Processes, 11(2), 485. https://doi.org/10.3390/pr11020485