
ARWLS-AFEKE: SOC Estimation and Capacity Correction of Lithium Batteries Based on a Fusion Algorithm

Abstract
:1. Introduction
2. Mathematical Modeling of Power Batteries
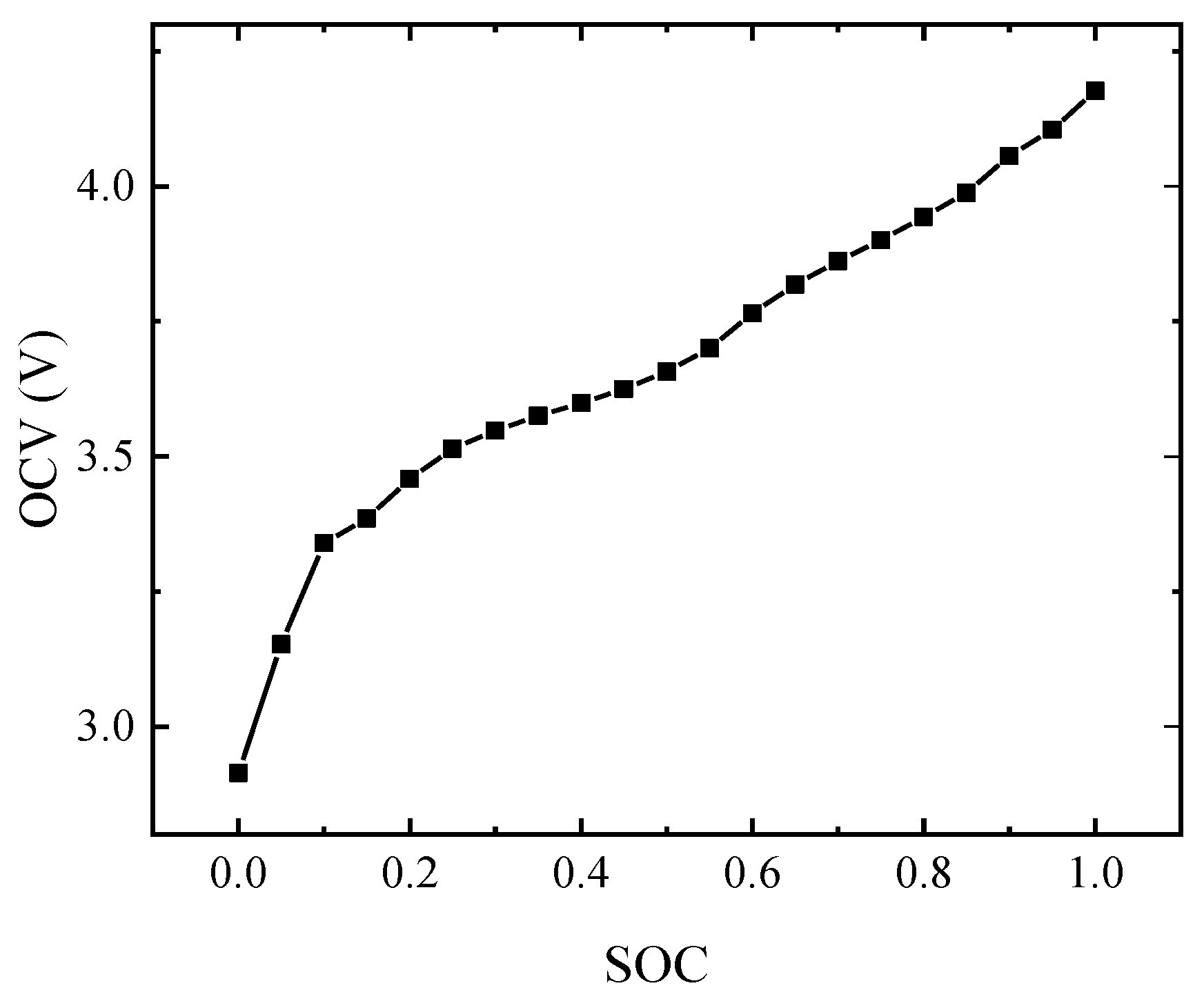
2.1. Definition of SOC
2.2. The Construction of Equivalent Battery Model
2.3. ARWLS Online Parameter Identification
3. Estimation of SOC for Lithium Batteries Using Adaptive Fading Extended Kalman Filter
3.1. Principle of SOC Estimation for AFEKF
3.2. ARWLS-AFEKF Fusion Algorithmic Principle
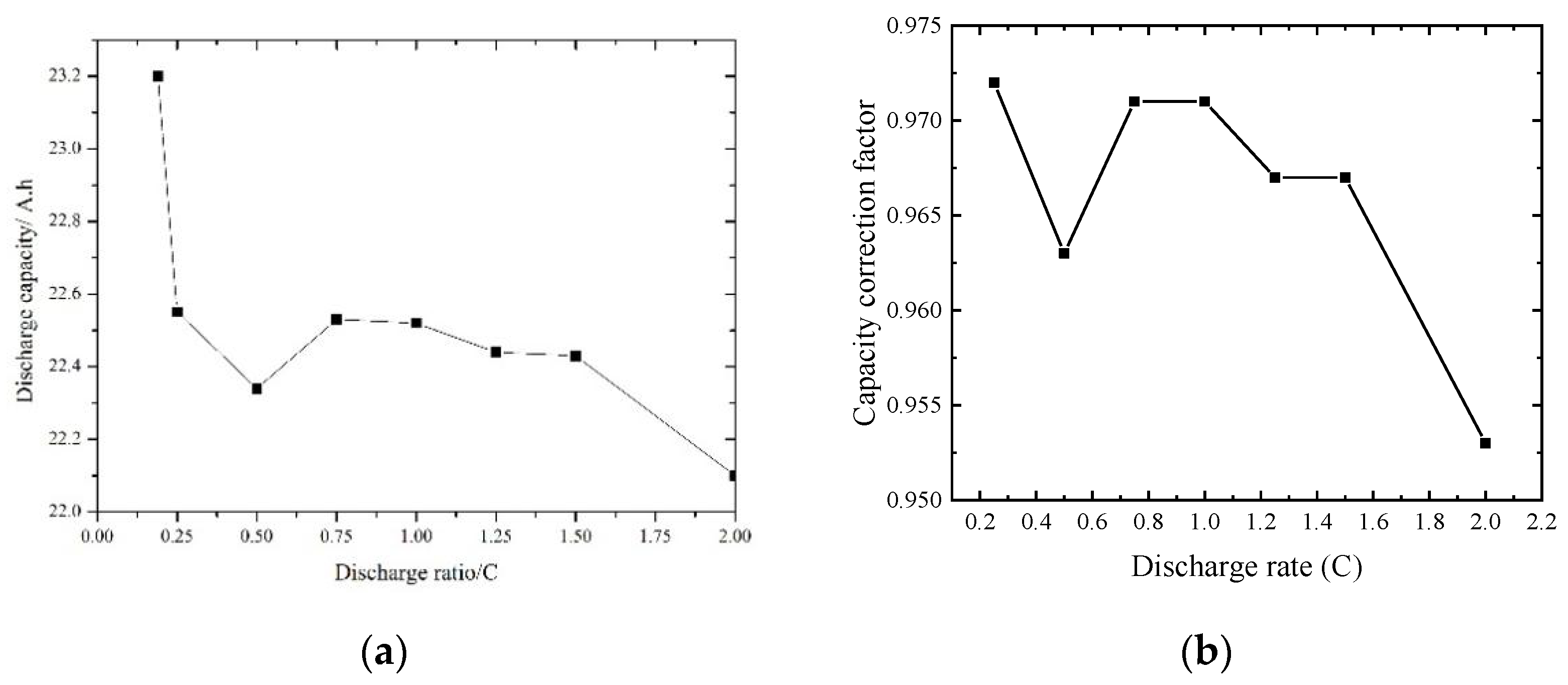
3.3. SOC Capacity Correction Based on the Fusion Algorithm
4. Results and Discussion
4.1. Parameter Settings
4.2. Determination of Initial SOC Value
4.3. Correction Factor Verification
4.4. Verification of Algorithm Performance under Different Operating Conditions
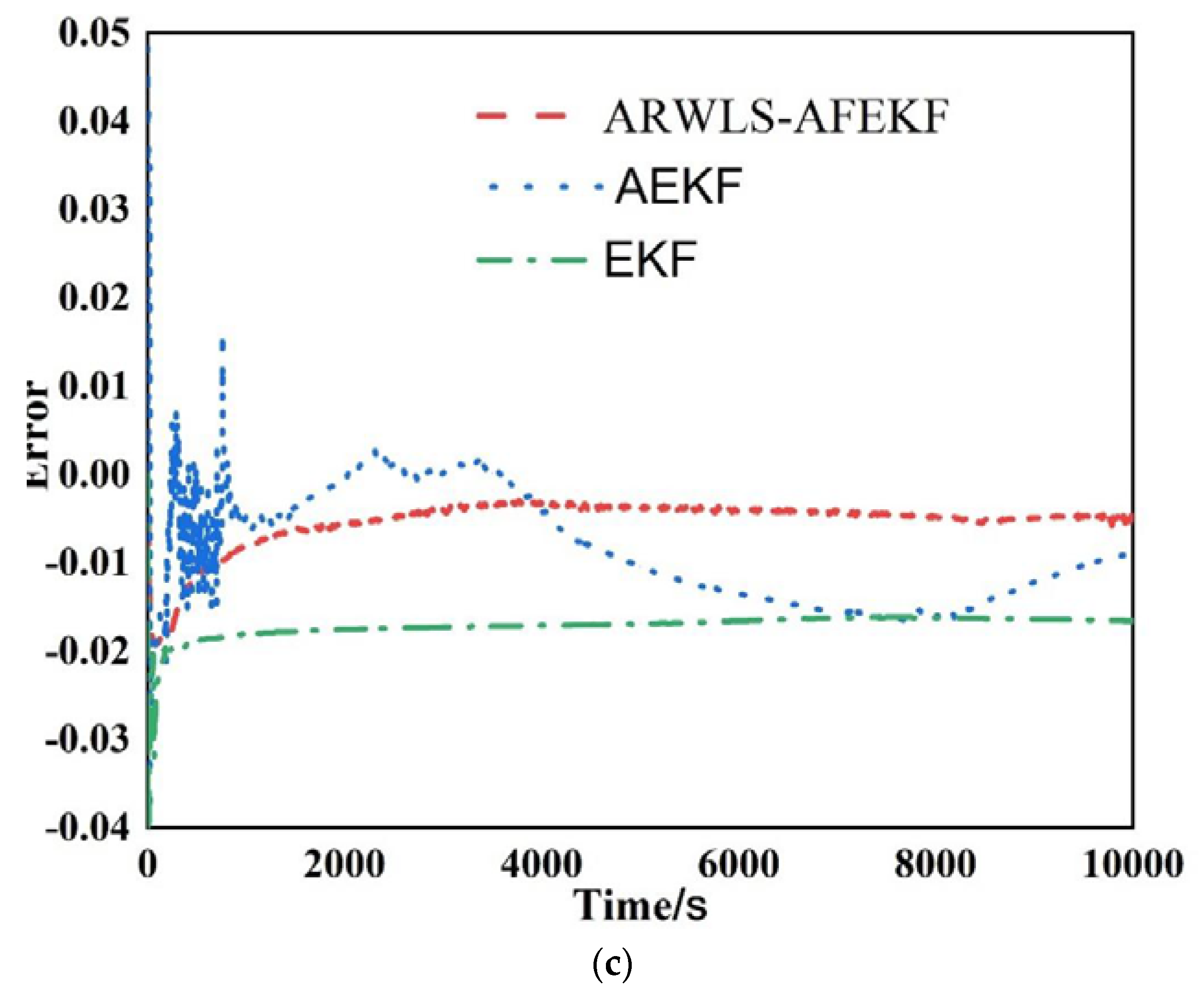
4.5. Reliability Verification of ARWLS-AFEKF Fusion Algorithm
4.6. Typical Application Scenario Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ye, Y.; Li, Z.; Lin, J.; Wang, X. State-of-charge estimation with adaptive extended Kalman filter and extended stochastic gradient algorithm for lithium-ion batteries. J. Energy Storage 2022, 47, 103611. [Google Scholar] [CrossRef]
- Xu, J.; Wang, D. A Dual-rate Sampled Multiple Innovation Adaptive Extended Kalman Filter Algorithm for State of Charge Estimation. Int. J. Energy Res. 2022, 46, 18796–18808. [Google Scholar] [CrossRef]
- Hossain, M.; Saha, S.; Arif, M.T.; Oo, A.M.T.; Mendis, N.; Haque, E. A Parameter Extraction Method for the Li-Ion Batteries with Wide-Range Temperature Compensation. IEEE Trans. Ind. Appl. 2020, 56, 5625–5636. [Google Scholar] [CrossRef]
- Tang, X.; Zhou, Y.; Gao, F.; Lai, X. Joint estimation of state-of-charge and state-of-health for all cells in the battery pack using “leader-follower” strategy. eTransportation 2023, 15, 100213. [Google Scholar] [CrossRef]
- Lai, X.; Yuan, M.; Tang, X.; Yao, Y.; Weng, J.; Gao, F.; Ma, W.; Zheng, Y. Co-Estimation of State-of-Charge and State-of-Health for Lithium-Ion Batteries Considering Temperature and Ageing. Energies 2022, 15, 7416. [Google Scholar] [CrossRef]
- Tang, X.; Liu, B.; Lv, Z.; Gao, F. Observer based battery SOC estimation: Using multi-gain-switching approach. Appl. Energy 2017, 204, 1275–1283. [Google Scholar] [CrossRef]
- Liu, X.; Li, W.; Zhou, A. PNGV Equivalent Circuit Model and SOC Estimation Algorithm for Lithium Battery Pack Adopted in AGV Vehicle. IEEE Access 2018, 6, 23639–23647. [Google Scholar] [CrossRef]
- Petzl, M.; Danzer, M.A. Advancements in OCV Measurement and Analysis for Lithium-Ion Batteries. IEEE Trans. Energy Convers. 2013, 28, 675–681. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of Charge and State of Health Estimation for Lithium Batteries Using Recurrent Neural Networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- Afshar, S.; Morris, K.; Khajepour, A. State-of-Charge Estimation Using an EKF-Based Adaptive Observer. IEEE Trans. Control Syst. Technol. 2019, 27, 1907–1923. [Google Scholar] [CrossRef]
- Huang, Z.; Yang, F.; Xu, F.; Song, X.; Tsui, K.L. Convolutional Gated Recurrent Unit-Recurrent Neural Network for State-of-Charge Estimation of Lithium-Ion Batteries. IEEE Access 2019, 7, 93139–93149. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Idris, M.; Mekhilef, S.; Adnan, S.B.R.S. Combined State of Charge and State of Energy Estimation of Lithium-Ion Battery Using Dual Forgetting Factor-Based Adaptive Extended Kalman Filter for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2021, 70, 1200–1215. [Google Scholar] [CrossRef]
- Ling, L.; Wei, Y. State-of-Charge and State-of-Health Estimation for Lithium-Ion Batteries Based on Dual Fractional-Order Extended Kalman Filter and Online Parameter Identification. IEEE Access 2021, 9, 47588–47602. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Jiang, L.; Huang, Y.; Cao, Y. PSO-based Optimization for Constant-current Charging Pattern for Li-ion Battery. Chin. J. Electr. Eng. 2019, 5, 72–78. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, L.; Wang, L.; Liao, C.; Zhang, Y. Joint State-of-Charge and State-of-Available-Power Estimation Based on the Online Parameter Identification of Lithium-Ion Battery Model. IEEE Trans. Ind. Electron. 2022, 69, 3677–3688. [Google Scholar] [CrossRef]
- Savargaonkar, M.; Chehade, A.; Hussein, A.A. A Novel Neural Network with Gaussian Process Feedback for Modeling the State-of-Charge of Battery Cells. IEEE Trans. Ind. Appl. 2022, 58, 5340–5352. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, J.; Lund, P.D.; Zhang, Y. Co-Estimating the State of Charge and Health of Lithium Batteries through Combining a Minimalist Electrochemical Model and an Equivalent Circuit Model. Energy 2022, 240, 122815. [Google Scholar] [CrossRef]
- He, H.; Zhang, X.; Xiong, R.; Xu, Y.; Guo, H. Online Model-Based Estimation of State-of-Charge and Open-Circuit Voltage of Lithium-Ion Batteries in Electric Vehicles. Energy 2012, 39, 310–318. [Google Scholar] [CrossRef]
- Chen, J.; Sun, B.; Li, Y.; Jing, R.; Zeng, Y.; Li, M. Credible capacity calculation method of distributed generation based on equal power supply reliability criterion. Renew. Energy 2022, 201, 534–547. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-Charge Estimation for Lithium-Ion Batteries Using Neural Networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Mu, S.; Liu, Q.; Kidkhunthod, P.; Zhou, X.; Wang, W.; Tang, Y. Molecular grafting towards high-fraction active nanodots implanted in N-doped carbon for sodium dual-ion batteries. Natl. Sci. Rev. 2020, 8, nwaa178. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Li, H.; He, Z.; Ji, W.; Zeng, J.; Li, X.; Zhang, Y.; Zhang, P.; Zhao, J. Electrochemical Failure Results Inevitable Capacity Degradation in Li-Ion Batteries—A Review. Energies 2022, 15, 9165. [Google Scholar] [CrossRef]
- Yan, A.; Li, Z.; Cui, J.; Huang, Z.; Ni, T.; Girard, P.; Wen, X. LDAVPM: A latch design and algorithm-based verification protected against multiple-node-upsets in harsh radiation environments. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2022. early access. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L.; Li, W.; Miao, Q. State-of-charge estimation of lithium-ion batteries using LSTM and UKF. Energy 2020, 201, 117664. [Google Scholar] [CrossRef]
- Goebel, C.; Callaway, D.S.; Jacobsen, H.-A. The Impact of State of Charge Management When Providing Regulation Power with Energy Storage. IEEE Trans. Power Syst. 2014, 29, 1433–1434. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L. Double-Quadrant State-of-Charge-Based Droop Control Method for Distributed Energy Storage Systems in Autonomous DC Microgrids. IEEE Trans. Smart Grid 2015, 6, 147–157. [Google Scholar] [CrossRef] [Green Version]
- Liang, G.; Rodriguez, E.; Farivar, G.G.; Ceballos, S.; Townsend, C.D.; Gorla, N.B.Y.; Pou, J. A Constrained Intersubmodule State-of-Charge Balancing Method for Battery Energy Storage Systems Based on the Cascaded H-Bridge Converter. IEEE Trans. Power Electron. 2022, 37, 12669–12678. [Google Scholar] [CrossRef]
- Morstyn, T.; Savkin, A.V.; Hredzak, B.; Agelidis, V.G. Multi-Agent Sliding Mode Control for State of Charge Balancing Between Battery Energy Storage Systems Distributed in a DC Microgrid. IEEE Trans. Smart Grid 2018, 9, 4735–4743. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated capacity | 3 A · h |
| Rated voltage | 3.6 V |
| Charge cut-off voltage | 4.2 V |
| Charge cut-off current | 0.15 A |
| Discharge cut-off voltage | 2.75 V |
| Density of energy | 166 wh · kg−1 |
| Operating Conditions | RMSE/% | MAPE/% | ||||
|---|---|---|---|---|---|---|
| EKF | AEKF | ARWLS-AFEKF | EKF | AEKF | ARWLS-AFEKF | |
| DST25 | 1.53 | 0.25 | 0.22 | 1.66 | 2.88 | 0.61 |
| BJDST25 | 2.17 | 0.23 | 0.20 | 2.31 | 2.42 | 0.67 |
| FUDS25 | 3.59 | 10.96 | 0.37 | 3.88 | 827.39 | 0.71 |
| Algorithms of SOC Estimation | Advantages | Disadvantages | Robustness |
|---|---|---|---|
| EKF | No need to linearize the model and no model linearization error | Easier to scatter under perturbation and initial uncertainty | Poorer |
| AEKF | Overcoming the shortcoming of traditional method and suitable for the occasion of drastic current change | The model linearization process generates errors | Poor |
| ARWLS-AFEKF | Strong anti-interference ability | Computationally heavy | Good |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Zhang, F.; Zhao, X.; Lei, G.; He, C. ARWLS-AFEKE: SOC Estimation and Capacity Correction of Lithium Batteries Based on a Fusion Algorithm. Processes 2023, 11, 800. https://doi.org/10.3390/pr11030800
Chen H, Zhang F, Zhao X, Lei G, He C. ARWLS-AFEKE: SOC Estimation and Capacity Correction of Lithium Batteries Based on a Fusion Algorithm. Processes. 2023; 11(3):800. https://doi.org/10.3390/pr11030800
Chicago/Turabian StyleChen, Hu, Fujian Zhang, Xi Zhao, Guoping Lei, and Chao He. 2023. "ARWLS-AFEKE: SOC Estimation and Capacity Correction of Lithium Batteries Based on a Fusion Algorithm" Processes 11, no. 3: 800. https://doi.org/10.3390/pr11030800