

Research on a Multi-Agent Cooperative Control Method of a Distributed Energy Storage System


Abstract
:1. Introduction
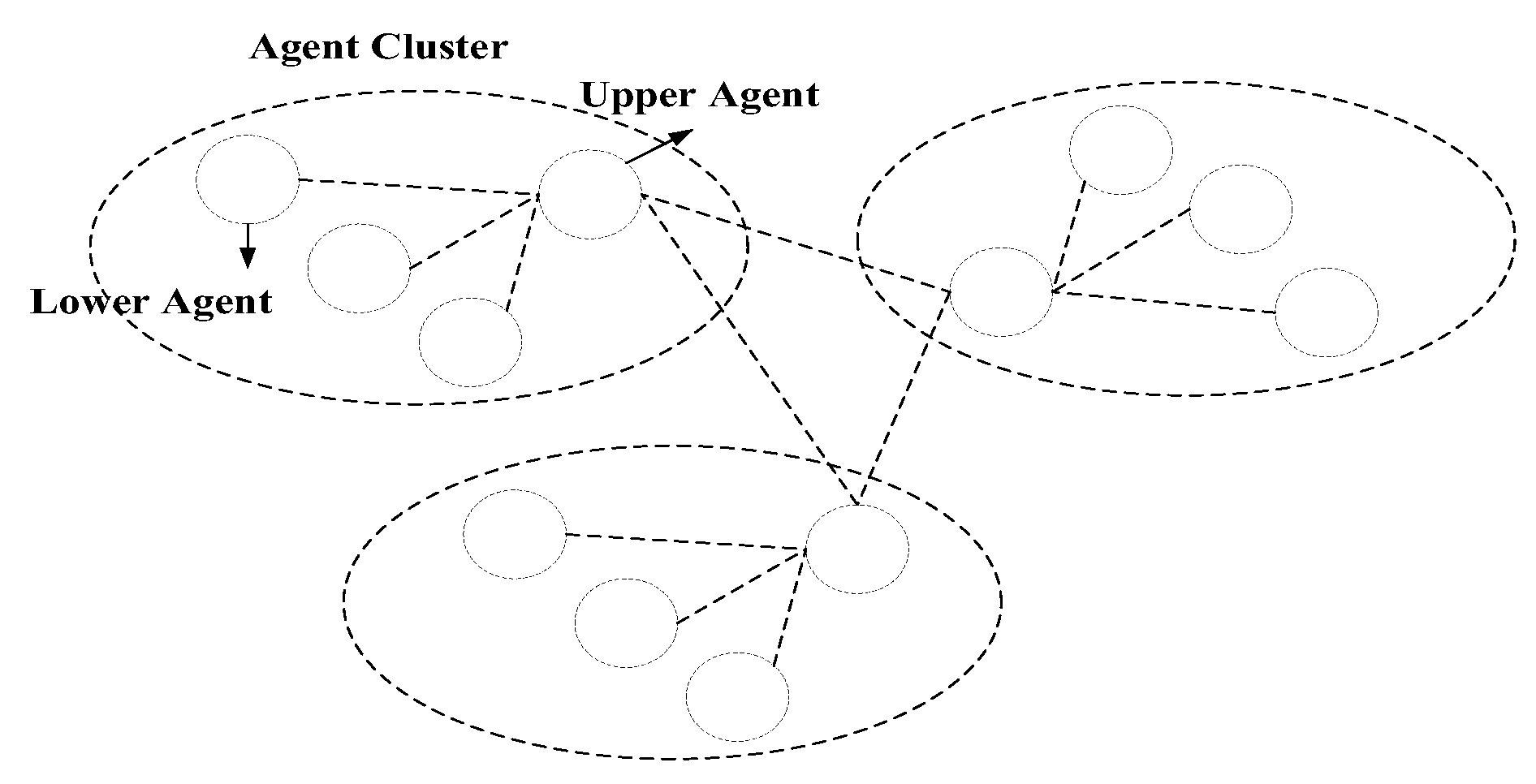
2. Multi-Agent Collaborative Control Architecture for Energy Storage
3. Active Control Strategy of Energy Storage Agent
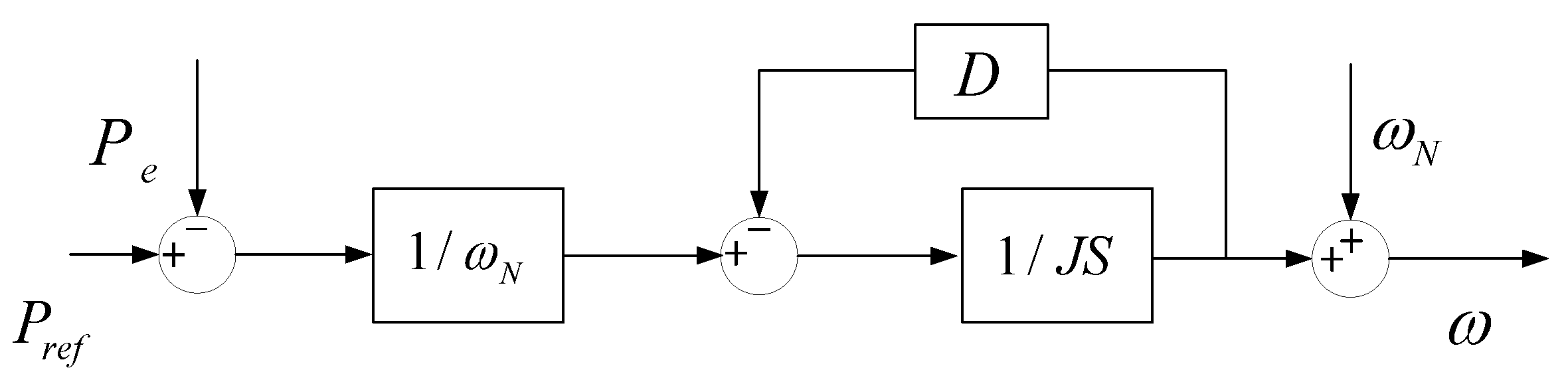
3.1. Frequency Control Strategy
3.2. Voltage Control Strategy
4. Multi-Agent Collaborative Control Strategy for Energy Storage
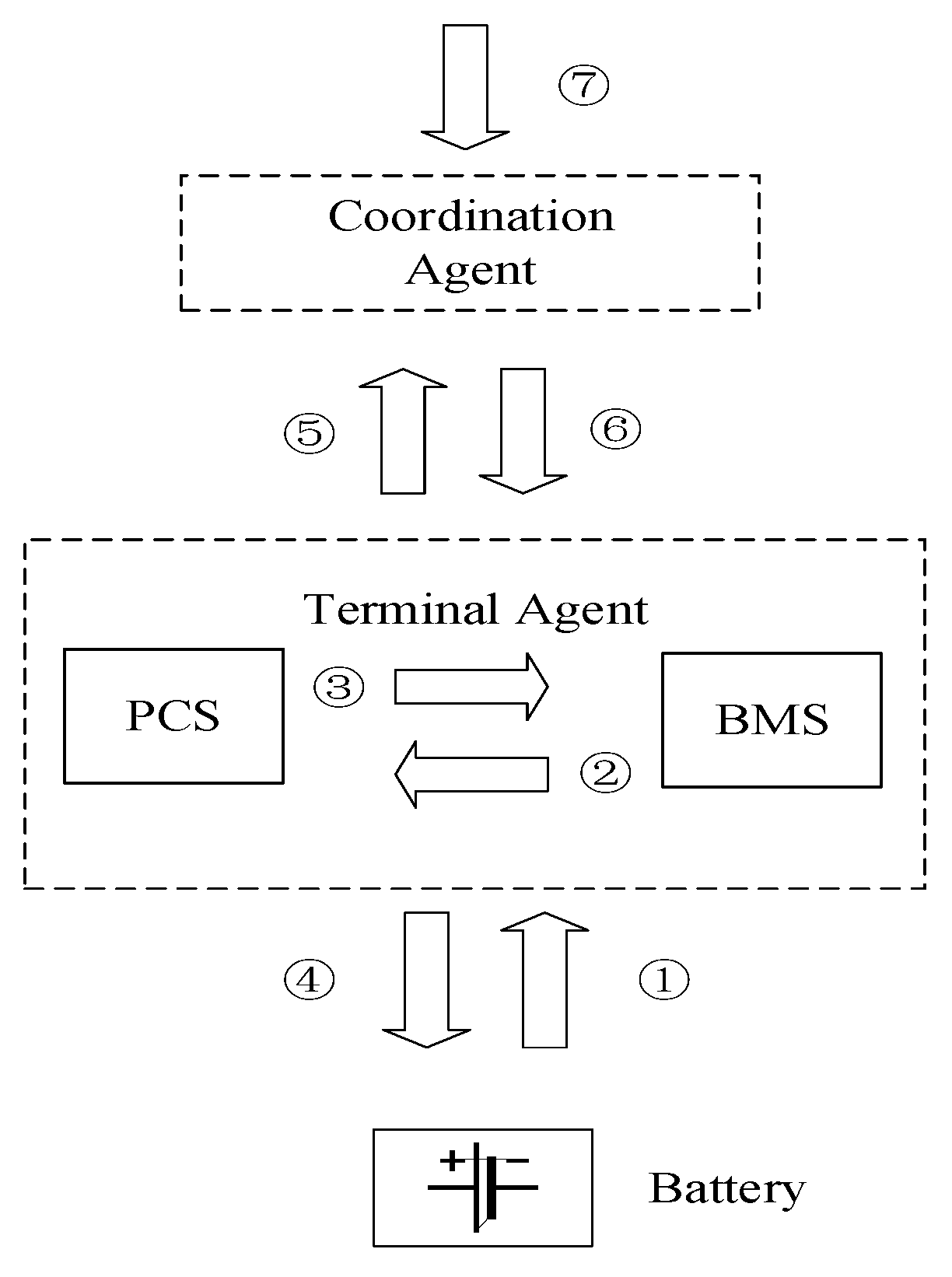
4.1. Energy Storage Agent Control Logic
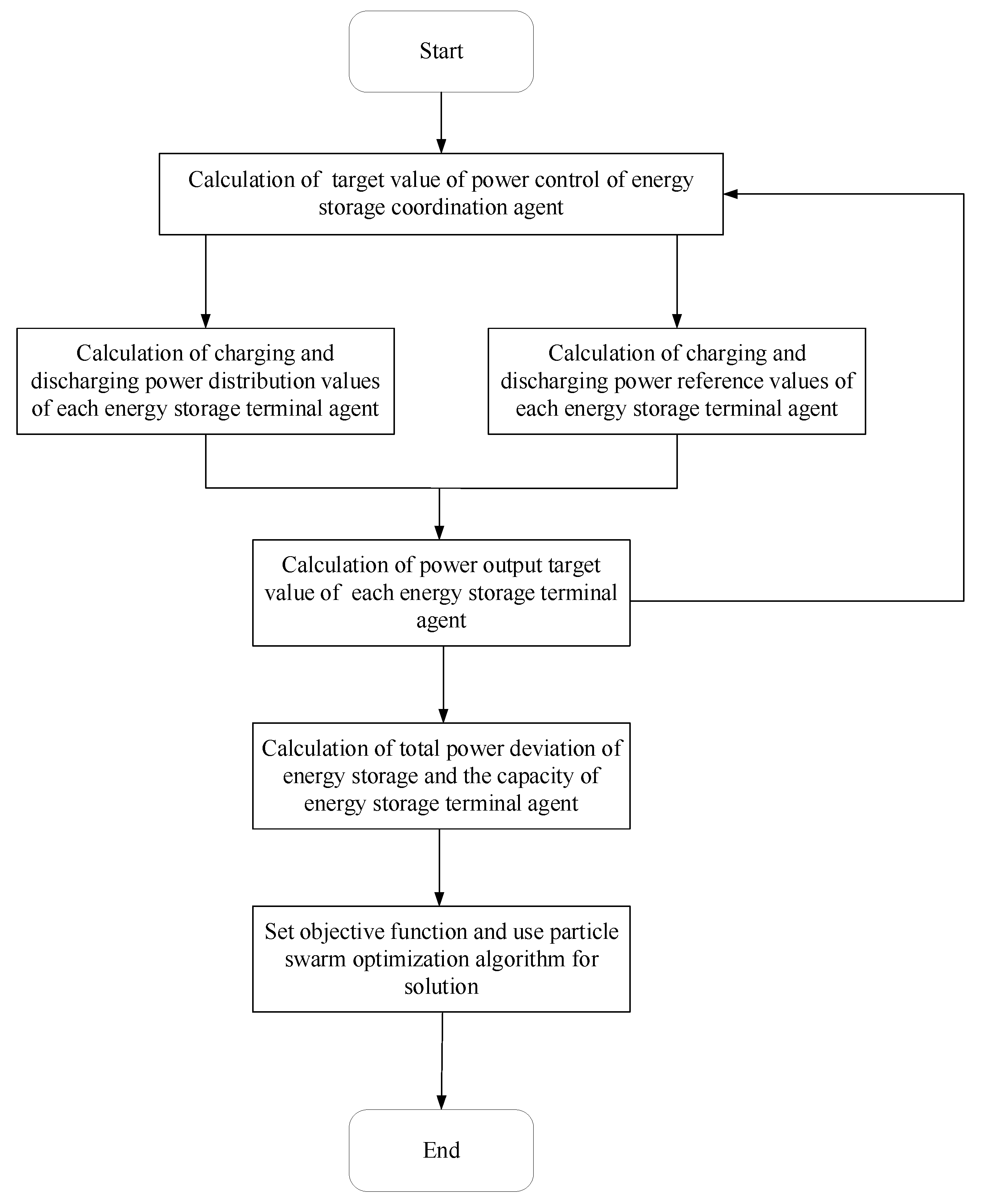
4.2. Multi-Energy Storage Agent Cooperative Control Algorithm
- (1)
- Set the total control target value of the regional energy storage coordination agent according to the power grid dispatching requirements .
- (2)
- Calculate the initial power distribution value of each energy storage terminal agent:
- (3)
- Calculate the power reference value of each energy storage terminal agent:
- (4)
- Determine the output power target value of each energy storage terminal agent:
4.3. Influencing Factors of Collaborative Control
5. Analysis of Numerical Examples
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| MAS | Multi-Agent System |
| ES | Energy Storge |
| BMS | Battery management system |
| PCS | Power conversion system |
| VSG | Virtual synchronous generator |
| SPWM | Sinusoidal pulse width modulation |
| DC | Direct current |
| AC | Alternating current |
| Direct voltage | |
| PV | Photovoltaic |
| P/p | Active power |
| Q/q | Reactive power |
| p.u. | Per unit |
| Hz | Frequency unit |
| SOC | State of charge |
| MW | Active power unit |
| Mvar | Reactive power unit |
| L | Inductance |
| R | Resistance |
| C | Electric capacity |
| PCC | Point of common coupling |
| Pref | Active power setting value |
| Output active power of virtual synchronous generator | |
| Output reactive power of virtual synchronous generator | |
| Output voltage of virtual synchronous generator | |
| Inductance | |
| A-phase potential | |
| B-phase potential | |
| C-phase potential | |
| Output current of virtual synchronous generator | |
| Modulated voltage | |
| Damping coefficient | |
| Virtual inertia | |
| The electromagnetic torque | |
| Output potential | |
| Reactive voltage coefficient | |
| Voltage amplitude | |
| Output voltage amplitude | |
| Reactive voltage integral coefficient | |
| abc/dq | Park’s Transformation |
| Total power control target value | |
| Initial value of power distribution | |
| n | The number of terminal agents |
| The state of charge of the battery pack of the ith energy storage terminal at the last moment | |
| The power reference | |
| The maximum allowable charging and discharging power | |
| The total power deviation | |
| The power margin | |
| The output power target value | |
| Objective function | |
| min | Minimum |
| The power difference between the charging and discharging power of the energy storage station at the last moment and the target value | |
| The difference between the regulated state of charge of the energy storage station and the preset state of charge | |
| The charging and discharging power of the ith energy storage terminal agent at the last moment | |
| The adjustment time | |
| The energy storage capacity of the ith energy storage terminal agent | |
| The preset state of charge of the battery pack | |
| Bus | Generatrix |
| Electrical angular velocity | |
| Synchronous electrical angular velocity | |
| Electrical angle | |
| The power adjustment factor | |
| The power adjustment factor | |
| The weight coefficient | |
| The weight coefficient | |
| IEC | International Electro technical Commission |
References
- Xue, C. Photovoltaic Power Generation Problem and Its Influence on Power System. Electron. Technol. Softw. Eng. 2019, 14, 229–230. [Google Scholar]
- Yuanyuan, S.; Shurong, L.; Fang, S.; Hengxu, Z. Responsibility Division of Multiple Harmonic Sources in Distribution Networks with Distributed Harmonic Sources. Proc. CSEE 2019, 5389–5398, 5586. [Google Scholar]
- Lihong, M.; Yu, X.; Guanghai, N.; Haisheng, W.; Sifan, L.; Yi, L. Research on Distributed Generation Optimization Configuration Considering Virtual Power Plant in Distribution Network. Electr. Drive 2022, 14, 74–80. [Google Scholar]
- Weiping, Y.; Zhijun, E.; Ning, Z.; Bangyu, Y.; Wei, L.; Chen, L. Research on Energy Management of Photovoltaic Hybrid Energy Storage System. Renew. Energy Resour. 2021, 2, 264–269. [Google Scholar]
- Zhicheng, L.I.; Daogang, P.E.; Huirong, Z.H.; Danhao, W.A.; Yuchen, L.I. Development Prospects of Energy Storage Participating in Auxiliary Services of Power Systems Under the Targets of the Dual-carbon Goal. Energy Storage Sci. Technol. 2021, 4, 70–82. [Google Scholar]
- Yu, C.H.; Wu, J.P.; Yang, H.J.; Li, Z.H.; Teng, X.L.; Tu, M. Frequency Regulation Strategy for Power Grid Incorporating Large-scale Energy Storage. Electr. Power Eng. Technol. 2019, 4, 68–73. [Google Scholar]
- Yi, Z.; Yi, D.; Yingying, G.; Lixin, J. Control Strategy of Energy Storage in Primary Frequency Regulation of Power Grid Considering Dead Band and State of Charge. Sci. Technol. Eng. 2022, 11, 4391–4399. [Google Scholar]
- Yongheng, L.; Xiaotian, H.; Lei, W.; Jingwen, Y. Research on Frequency Modulation Control Strategy of Photovoltaic Grid Connection Based on Fuzzy Control. Jilin Electr. Power 2022, 50, 1–4. [Google Scholar]
- Gangui, Y.; Ying, L.; Shuangming, D.; Hongbo, L.; Gang, M.; Junhui, L. Power Distribution Strategy for Battery Energy Storage Unit Group Participating in Secondary Frequency Regulation of Power System. Autom. Electr. Power Syst. 2020, 14, 26–34. [Google Scholar]
- Zhijie, Q.; Linchao, M. Research on Large-scale Energy Storage Control Strategy for Power System Stability Improvement. High Volt. Appar. 2022, 58, 75–84+91. [Google Scholar]
- Ping, Y.; Zhuo, C.; Ting, L.; Jiawen, Z.; Bolin, L.; Xiangping, C. A Control Method of Photovoltaic Power Generation and Hybrid Energy Storage Based on VSG. Power Syst. Clean Energy 2023, 39, 83–91+113. [Google Scholar]
- Wan, C.; Qian, W.; Zhao, C.; Song, Y.; Yang, G. Probabilistic Forecasting Based Sizing and Control of Hybrid Energy Storage for Wind Power Smoothing. IEEE Trans. Sustain. Energy 2021, 12, 1841–1852. [Google Scholar] [CrossRef]
- Yang, Q.F.; Wang, C.Q.; Wei, J.H. Capacity Allocation of Energy Storage System for Improving Grid Inertia and Primary Frequency Regulation. Electr. Power Constr. 2020, 41, 116–124. [Google Scholar]
- Hua, S.; Jiantao, S.; Jiangfeng, Z.; Liling, G.; Ye, G.; Xinwei, S. Review on Planning and Bidding Strategy of Energy Storage Considering Frequency Regulation. Electr. Power Autom. Equip. 2021, 9, 191–198. [Google Scholar]
- Li, W. Research on Hybrid Energy Storage Capacity Configuration of Island-type Wind-solar Complementary Microgrid. Matster’s Thesis, Xi’an University of Science and Technology, Shaanxi, China, 2019. [Google Scholar]
- Meiqin, M.; Jialing, H.; Liuchen, Z. Energy Storage Optimization Allocation Method Considering Photovoltaic Output Prediction Error Correction. ACTA Energ. Sol. Sin. 2021, 2, 410–415. [Google Scholar]
- Wei, Z.E.N.G.; Xiong, J.; Suliang, M.A.; Yuliang, T.A.N.; Jianlin, L.I. Research on Control Method of Distributed Energy Storage System to Improve Photovoltaic Consumption. Energy Storage Sci. Technol. 2022, 11, 3268–3274. [Google Scholar]
- Chen, Z.; Sun, Y.; Zhang, Y.; Li, M.C.; Zhang, D.L.; Xiao, W. Research on Energy Storage Optimal Allocation Considering Complementarity of Wind Power and PV. Trans. China Electrotech. Soc. 2021, 1, 145–153. [Google Scholar]
- Qingzhi, Y.; Wei, J.; Chunlei, X. Monitoring Design and Research on Hierarchical Control of AC/DC Hybrid Microgrid Based on Multi-agent. High Volt. Eng. 2020, 7, 2327–2339. [Google Scholar]
- Li, Z.-X.; Qiu, X.; Han, W.-Y. Simulation Research on Virtual Synchronization Control Strategy of Optical Storage Integration Based on DIgSILENT Platform. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021; pp. 1133–1137. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
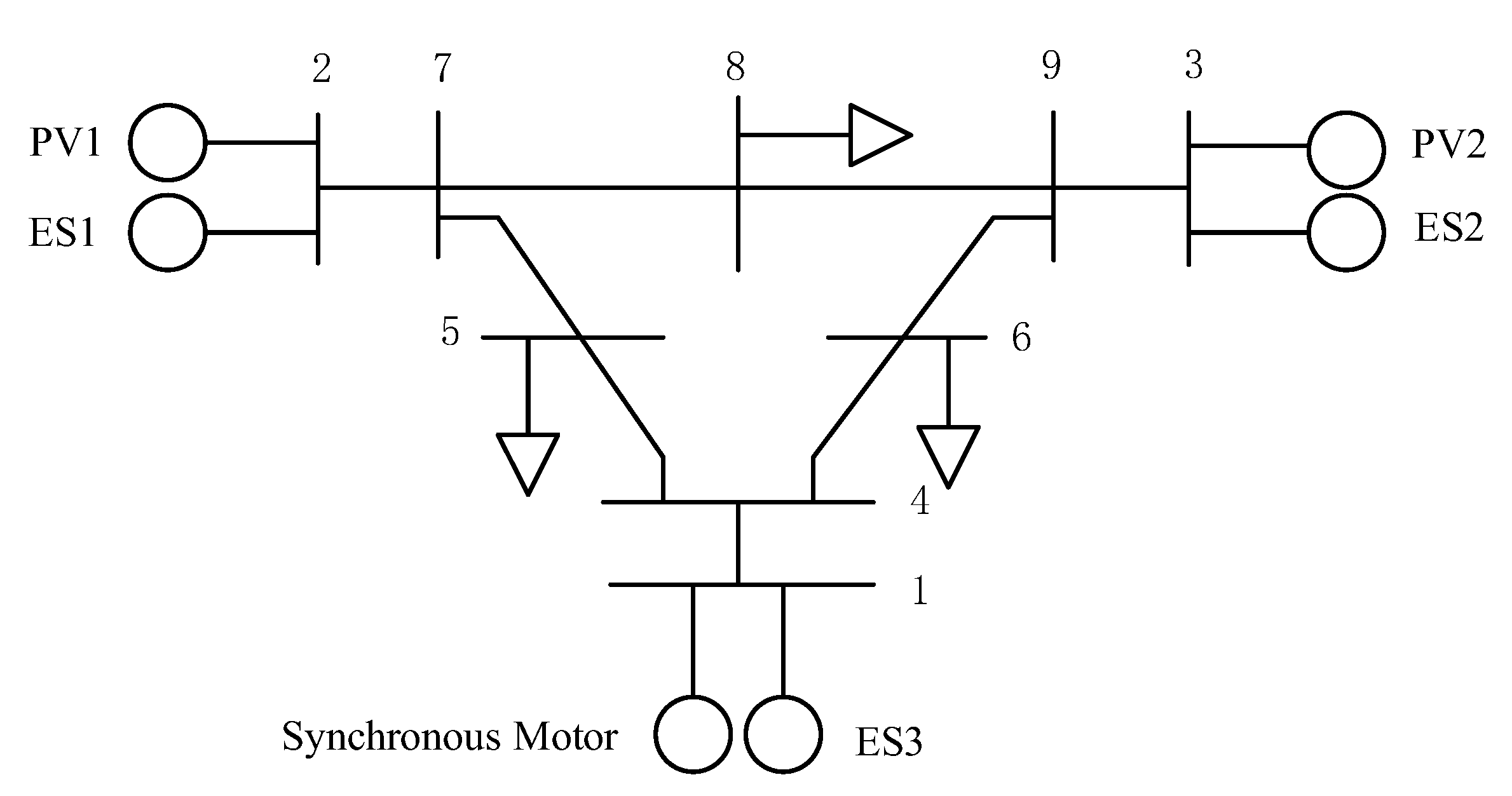
| Node ID | Node Type | Operating Parameters |
|---|---|---|
| 1 | PQ | Active power of synchronous motor: 0.8 MW Reactive power of synchronous motor: 0.3 Mvar Energy storage active power: −0.2 MW Energy storage reactive power: 0 Mvar |
| 2 | PQ | PV active power: 0.8 MW PV reactive power: 0.1 Mvar Energy storage active power: 0.08 MW Energy storage reactive power: 0.01 Mvar |
| 3 | PQ | PV active power: 0.8 MW PV reactive power: 0.1 Mvar Energy storage active power: 0.08 MW Energy storage reactive power: 0.01 Mvar |
| 5 | PQ | Load active power: 1.5 MW Load reactive power: 0.5 Mvar |
| 6 | PQ | Load active power: 1.5 MW Load reactive power: 0.5 Mvar |
| 8 | PQ | Load active power: 1.5 MW Load reactive power: 0.5 Mvar |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, T.; Qiu, X.; Tang, C.; Qu, L. Research on a Multi-Agent Cooperative Control Method of a Distributed Energy Storage System. Processes 2023, 11, 1149. https://doi.org/10.3390/pr11041149
Shi T, Qiu X, Tang C, Qu L. Research on a Multi-Agent Cooperative Control Method of a Distributed Energy Storage System. Processes. 2023; 11(4):1149. https://doi.org/10.3390/pr11041149
Chicago/Turabian StyleShi, Tao, Xuan Qiu, Chunsheng Tang, and Linan Qu. 2023. "Research on a Multi-Agent Cooperative Control Method of a Distributed Energy Storage System" Processes 11, no. 4: 1149. https://doi.org/10.3390/pr11041149
APA StyleShi, T., Qiu, X., Tang, C., & Qu, L. (2023). Research on a Multi-Agent Cooperative Control Method of a Distributed Energy Storage System. Processes, 11(4), 1149. https://doi.org/10.3390/pr11041149