

Application of the MPPT Control Algorithm Based on Hybrid Quantum Particle Swarm Optimization in a Photovoltaic Power Generation System

Abstract
:1. Introduction
2. Related Works
3. MPPT Control Algorithm Establishment Based on HQPSO
3.1. Structural Design of the PPG System and Photovoltaic Cells
3.2. Design of the MPPT Method
3.3. Construction of the MPPT Control Algorithm Based on HQPSO
4. H–M Algorithm Performance and Application Analysis in the PPG System
4.1. Performance Analysis of the H–M Algorithm
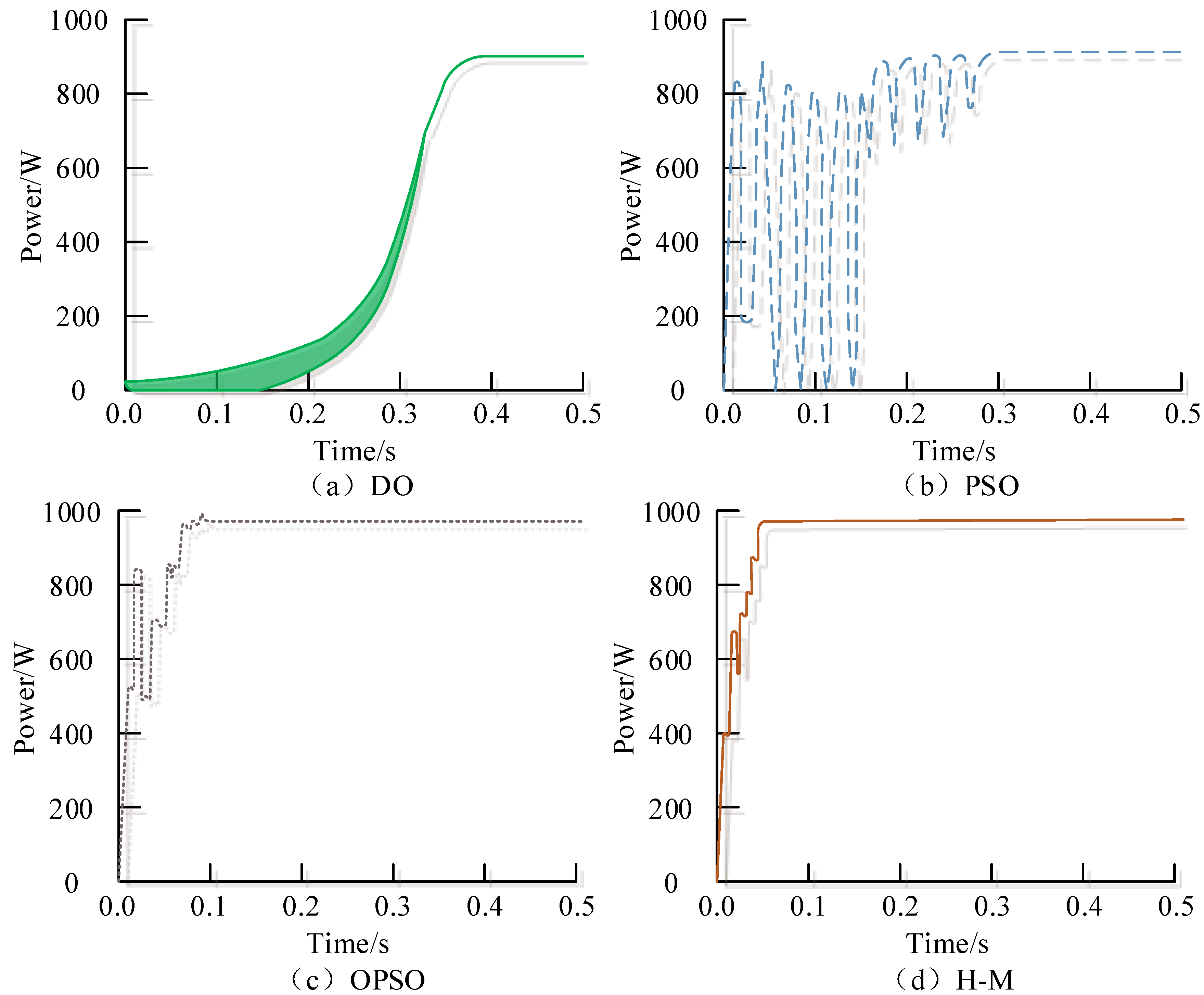
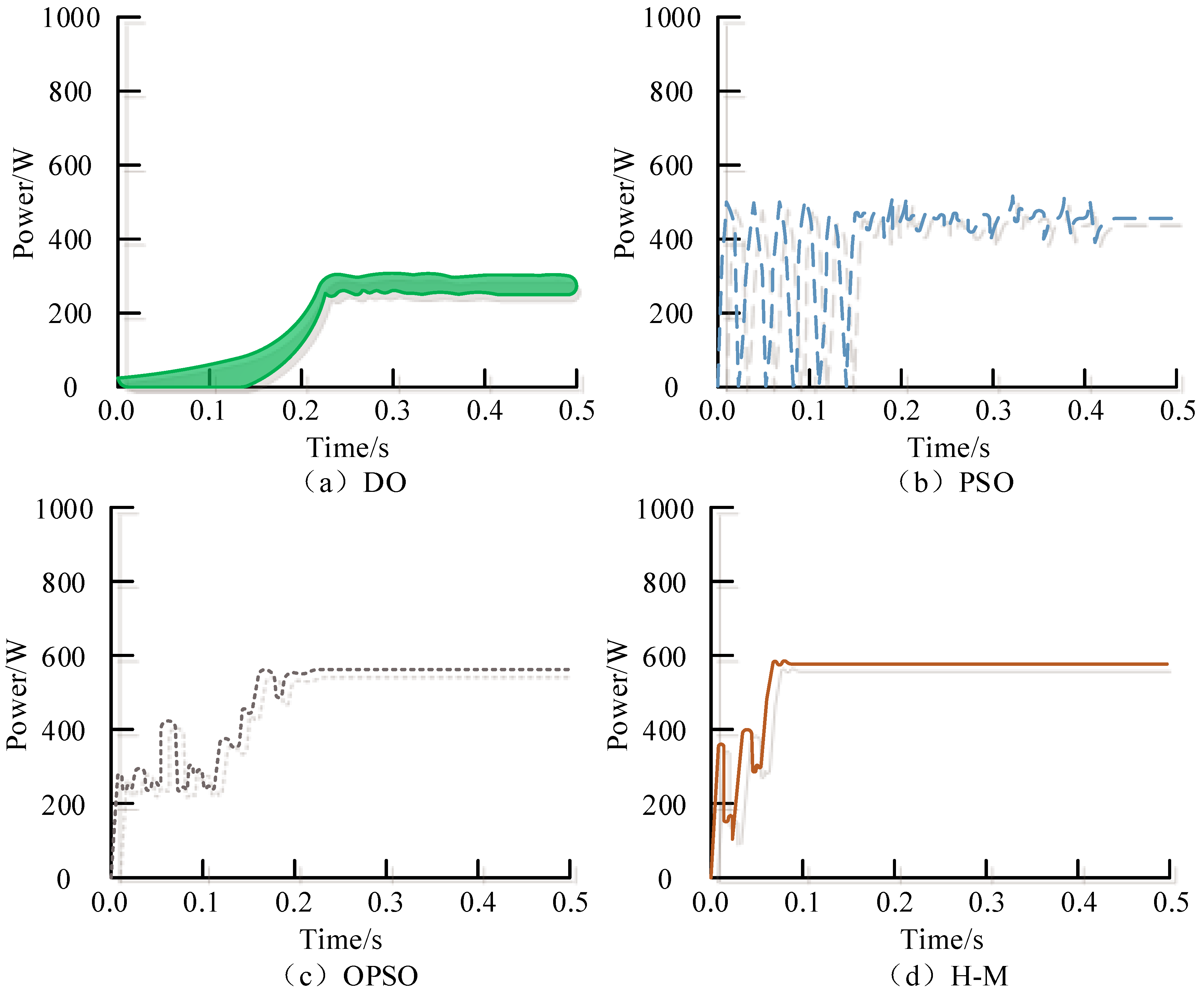
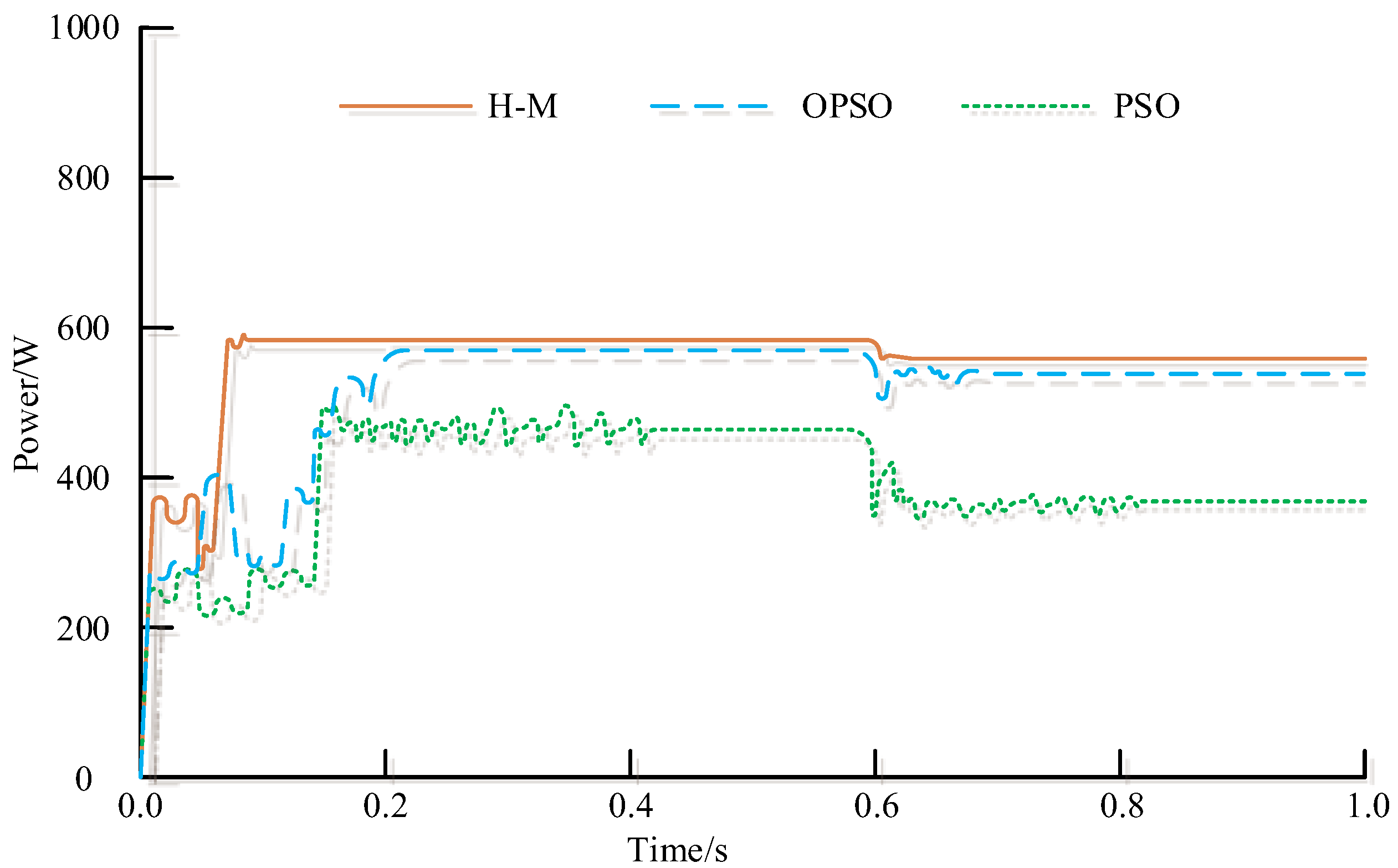
4.2. Application Analysis of the H–M Algorithm in the PPG System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mathi, R.; Jayalalitha, S. Influence of renewable energy sources on the scheduling on thermal power stations and its optimization for CO2 reduction. Comput. Intell. 2022, 38, 903–920. [Google Scholar] [CrossRef]
- Farmahini, A.H.; Friedrich, D.; Brandani, S.; Sarkisov, L. Exploring new sources of efficiency in process-driven materials screening for post-combustion carbon capture. Energy Environ. Sci. 2020, 13, 1018–1037. [Google Scholar] [CrossRef]
- Sun, S.; Liu, Y.; Li, Q.; Wang, T.; Chu, F. Short-term multi-step wind power forecasting based on spatio-temporal correlations and transformer neural networks. Energy Convers. Manag. 2023, 283, 116916. [Google Scholar] [CrossRef]
- Vijayalakshmi, V.J.; Arumugam, P.; Christy, A.A.; Brindha, R. Simultaneous allocation of EV charging stations and renewable energy sources: An Elite RERNN-m2MPA approach. Int. J. Energy Res. 2022, 46, 9020–9040. [Google Scholar] [CrossRef]
- Huang, X.; Chen, N.; Ye, D.; Zhong, A.; Liu, H.; Li, Z.; Liu, S. Structurally complementary star-shaped unfused ring electron acceptors with simultaneously enhanced device parameters for ternary organic solar cells. Sol. RRL 2023, 2300143. [Google Scholar] [CrossRef]
- Balbino, A.J.; Nora, B.; Lazzarin, T.B. An Improved Mechanical Sensorless Maximum Power Point Tracking Method for PMSG-Based Small Wind Turbines Systems. IEEE Trans. Ind. Electron. 2021, 69, 4765–4775. [Google Scholar] [CrossRef]
- Zhang, X.; Gamage, D.; Wang, B.; Ukil, A. Hybrid Maximum Power Point Tracking Method Based on Iterative Learning Control and Perturb & Observe Method. IEEE Trans. Sustain. Energy 2021, 12, 659–670. [Google Scholar]
- Li, Z.; Zhang, L.; Zhang, R.; Wang, Z.; Xue, Z.; Sun, H. Unscented Kalman filtering method for scheduling photovoltaic power generation system fluctuations. Proc. Inst. Mech. Eng. Part A J. Power Energy 2021, 235, 608–619. [Google Scholar] [CrossRef]
- Sun, K.Q.; Li, K.J.; Pan, J.P.; Liu, Y.; Liu, Y.L. An optimal combined operation scheme for pumped storage and hybrid wind-photovoltaic complementary power generation system. Appl. Energy 2019, 242, 1155–1163. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, C.; Yuan, R.; Li, T.; Jiang, Z. Design scheme for fast charging station for electric vehicles with distributed photovoltaic power generation. Glob. Energy Interconnect. 2019, 2, 150–159. [Google Scholar] [CrossRef]
- Bhende, C.N.; Hota, S.K.; Nayak, K.; Karanki, S.B. Cooperative control of photovoltaic based water pumping system. IET Renew. Power Gener. 2020, 14, 2278–2286. [Google Scholar] [CrossRef]
- Wu, S.L.; Li, S.S.; Gu, F.C.; Chen, P.H.; Chen, H.C. Application of supercapacitors in photovoltaic power generation system. Sens. Mater. 2019, 31, 3583–3597. [Google Scholar] [CrossRef]
- Babaei, S.M.; Yahyazadeh, M.; Marj, H.F. Novel MPPT for linear-rotational sun-tracking system using fractional fuzzy grey-based sliding mode control. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 1379–1401. [Google Scholar] [CrossRef]
- Zhong, C.; Li, H.; Zhou, Y.; Lv, Y.; Chen, J.; Li, Y. Virtual synchronous generator of PV generation without energy storage for frequency support in autonomous microgrid. Int. Electr. Power Energy Syst. 2022, 134, 107343. [Google Scholar] [CrossRef]
- Alrasheed, K.S.; Toha, S.F.; Anuar, H.; Buys, Y.F. Maximum power point tracking using light dependent resistor and dc motor for solar photovoltaic system in Kuwait. Int. J. Recent Technol. Eng. 2021, 9, 222–228. [Google Scholar]
- Nasr, F.; Madani, S.M.; Niroomand, M. Dual-objective control strategy for maximum power and efficiency point tracking in wirelessly powered biomedical implanted devices. IET Microw. Antennas Propag. 2020, 14, 36–44. [Google Scholar] [CrossRef]
- Pachaivannan, N.; Subburam, R.; Ramkumar, U.; Kasinathan, P. Crowded plant height optimisation algorithm tuned maximum power point tracking for grid integrated solar power conditioning system. IET Renew. Power Gener. 2019, 13, 2137–2147. [Google Scholar] [CrossRef]
- Azzali, N.; Meucci, M.; Rosa, D.D.; Mercatelli, L.; Sani, E. Spectral emittance of ceramics for high temperature solar receivers. Sol. Energy 2021, 222, 74–83. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Virtual-vector-based robust predictive current control for dual three-phase PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2048–2058. [Google Scholar] [CrossRef]
- Xu, L.; Wang, H.; Su, L.; Lu, D.; Peng, K.; Gao, H. A new class of high-entropy fluorite oxides with tunable expansion coefficients, low thermal conductivity and exceptional sintering resistance. J. Eur. Ceram. Soc. 2021, 41, 6670–6676. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Algorithm | Population Size | Maximum | Minimum | Mean Value | Standard Deviation | Average Number of Convergence Iterations | Convergence Rate/% |
|---|---|---|---|---|---|---|---|---|
| Sphere | PSO | 10 | 2.23 × 10−3 | 1.44 × 10−20 | 8.09 × 10−5 | 3.62 × 10−4 | 685 | 68 |
| 20 | 5.43 × 10−19 | 7.68 × 10−35 | 2.32 × 10−20 | 1.02 × 10−19 | 163 | 100 | ||
| 40 | 4.01 × 10−33 | 2.98 × 10−48 | 8.17 × 10−35 | 5.61 × 10−34 | 130 | 100 | ||
| OPSO | 10 | 1.12 × 10−6 | 1.73 × 10−18 | 2.33 × 10−8 | 1.01 × 10−19 | 216 | 98 | |
| 20 | 6.07 × 10−36 | 2.98 × 10−44 | 1.33 × 10−37 | 8.50 × 10−37 | 128 | 100 | ||
| 40 | 2.46 × 10−45 | 3.51 × 10−51 | 1.85 × 10−46 | 4.11 × 10−46 | 114 | 100 | ||
| H–M | 10 | 0 | 0 | 0 | 0 | 157 | 100 | |
| 20 | 0 | 0 | 0 | 0 | 80 | 100 | ||
| 40 | 0 | 0 | 0 | 0 | 33 | 100 | ||
| Rosebrock | PSO | 10 | 6.38 | 1.01 × 10−4 | 0.659 | 1.49 | 1000 | 0 |
| 20 | 4.97 | 1.05 × 10−4 | 0.721 | 1.52 | 1000 | 0 | ||
| 40 | 2.67 | 2.48 × 10−4 | 0.864 | 1.62 | 1000 | 0 | ||
| OPSO | 10 | 5.97 | 0 | 0.133 | 1.23 | 612 | 76 | |
| 20 | 3.93 | 0 | 0.673 | 1.07 | 504 | 80 | ||
| 40 | 1.38 | 0 | 0.274 | 0.388 | 433 | 80 | ||
| H–M | 10 | 0.972 | 0 | 0.139 | 0.334 | 427 | 98 | |
| 20 | 0.701 | 0 | 0.061 | 0.210 | 318 | 97 | ||
| 40 | 3.60 × 10−3 | 0 | 9.69 × 10−5 | 5.25 × 10−4 | 225 | 95 | ||
| Rastrigin | PSO | 10 | 16.8 | 0 | 0.653 | 1.02 | 1000 | 0 |
| 20 | 13.9 | 1.75 × 10−15 | 4.61 | 3.10 | 984 | 4 | ||
| 40 | 7.96 | 0 | 3.02 | 1.91 | 973 | 6 | ||
| OPSO | 10 | 17.7 | 0.0091 | 2.64 | 3.13 | 1000 | 0 | |
| 20 | 2.98 | 0 | 0.936 | 0.829 | 918 | 16 | ||
| 40 | 1.99 | 0 | 0.577 | 0.746 | 845 | 38 | ||
| H–M | 10 | 2.17 | 0 | 0.854 | 0.643 | 786 | 89 | |
| 20 | 1.79 | 0 | 0.339 | 0.512 | 713 | 96 | ||
| 40 | 0.325 | 0 | 0.0597 | 0.0236 | 653 | 94 |
| Algorithm | DO | PSO | OPSO | H–M |
|---|---|---|---|---|
| Average output power/W | 296.1452 | 467.3259 | 572.0456 | 589.6970 |
| Maximum output power/W | 296.1452 | 590.0347 | 590.5799 | 590.4539 |
| Minimum output power/W | 296.1452 | 296.1452 | 505.0121 | 587.8071 |
| Average time/s | 0.251 | 0.403 | 0.239 | 0.125 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Zhou, W.; Xu, W.; Nie, Y.; Chen, S.; Ou, Y.; Zhou, K.; Liu, M. Application of the MPPT Control Algorithm Based on Hybrid Quantum Particle Swarm Optimization in a Photovoltaic Power Generation System. Processes 2023, 11, 1456. https://doi.org/10.3390/pr11051456
Xu X, Zhou W, Xu W, Nie Y, Chen S, Ou Y, Zhou K, Liu M. Application of the MPPT Control Algorithm Based on Hybrid Quantum Particle Swarm Optimization in a Photovoltaic Power Generation System. Processes. 2023; 11(5):1456. https://doi.org/10.3390/pr11051456
Chicago/Turabian StyleXu, Xiaowei, Wei Zhou, Wenhua Xu, Yongjie Nie, Shan Chen, Yangjian Ou, Kaihong Zhou, and Mingxian Liu. 2023. "Application of the MPPT Control Algorithm Based on Hybrid Quantum Particle Swarm Optimization in a Photovoltaic Power Generation System" Processes 11, no. 5: 1456. https://doi.org/10.3390/pr11051456