
Review of Recent Advances in the Drive Method of Hydraulic Control Valve

Abstract
:1. Introduction
2. Solenoid Drive
2.1. Single Solenoid Drive
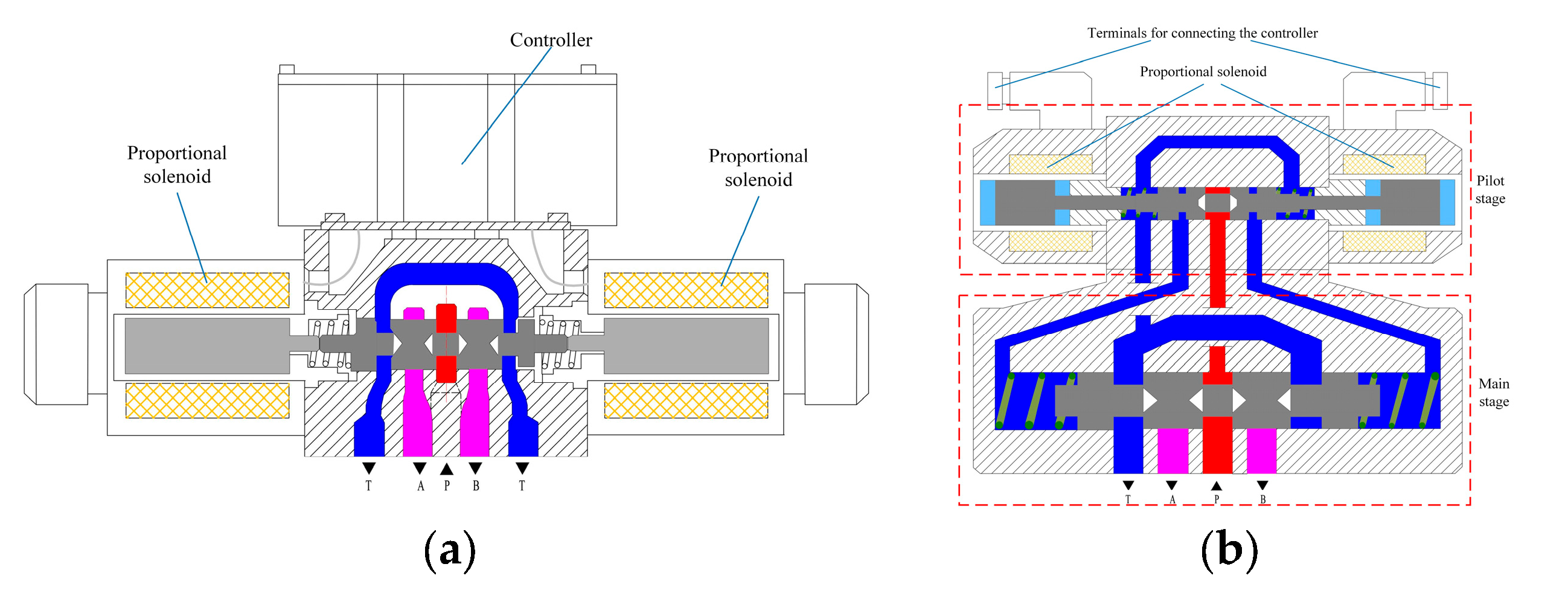
2.2. Double Solenoid Drive
3. Material Expansion Drive
4. Motor Drive
4.1. Stepper Motor Drive
4.2. Torque Motors
4.3. Voice Coil Motor
4.4. Other Motors
5. Hydraulic Valve Drive
6. Other Drive Methods
7. Analysis
8. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, B.; Shen, J.; Liu, S.; Su, Q.; Zhang, J. Research and Development of Electro-hydraulic Control Valves Oriented to Industry 4.0: A Review. Chin. J. Mech. Eng. 2020, 33, 29. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Z.; Huang, J.; Quan, L.; Zhao, B. Development of High-Speed On–Off Valves and Their Applications. Chin. J. Mech. Eng. 2022, 35, 67. [Google Scholar] [CrossRef]
- Tamburrano, P.; Plummer, A.R.; Distaso, E.; Amirante, R. A Review of Direct Drive Proportional Electrohydraulic Spool Valves: Industrial State-of-the-Art and Research Advancements. J. Dyn. Syst. Meas. Control. 2019, 141, 020801. [Google Scholar] [CrossRef]
- Hao, Q.; Wu, W.; Liang, X.; Liu, Z. Effects of Structure Parameters on Abnormal Opening of Pilot-Operated Relief Valve Under Alternating Pressure. IEEE Access 2019, 7, 33932–33942. [Google Scholar] [CrossRef]
- Meng, B.; Shentu, S.N.; Lin, Q.; Ruan, J. Research on characteristics of pressure-resistant torque motor for 2D valve. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 73–76. [Google Scholar] [CrossRef]
- Han, Y.-M.; Han, C.; Kim, W.H.; Seong, H.Y.; Choi, S.-B. Control performances of a piezoactuator direct drive valve system at high temperatures with thermal insulation. Smart Mater. Struct. 2016, 25, 097003. [Google Scholar] [CrossRef]
- Milecki, A.; Ortmann, J. Electrohydraulic Valve with Two Stepping Motors. In Challenges in Automation, Robotics and Measurement Techniques, Proceedings of AUTOMATION-2016, Warsaw, Poland, 2–4 March 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 73–79. [Google Scholar] [CrossRef]
- Istanto, I.; Lee, I.-Y.; Huh, J.-Y.; Lee, H.-C. Controller design for a nozzle-flapper type servo valve with electric position sensor. J. Phys. Conf. Ser. 2019, 16, 29–35. [Google Scholar] [CrossRef]
- Wang, B.; Wang, T.; Chen, J. Design and Experiments of a New Type Pressure Proportional Valve. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 120–124. [Google Scholar] [CrossRef]
- Rybarczyk, D.; Owczarek, P.; Kubacki, A. Design of Control System for an Electrohydraulic Drive Based on the Valve with PMSM Motor. In Proceedings of the International Conference Challenges in Automation, Robotics and Measurement Techniques (Automation), Warsaw, Poland, 2–4 March 2016; pp. 63–71. [Google Scholar] [CrossRef]
- Han, C.; Choi, S.-B.; Han, Y.-M. A Piezoelectric Actuator-Based Direct-Drive Valve for Fast Motion Control at High Operating Temperatures. Appl. Sci. 2018, 8, 1806. [Google Scholar] [CrossRef]
- Wang, S.J.; Weng, Z.D.; Jin, B.; Cai, H.X. Multi-objective genetic algorithm optimization of linear proportional solenoid actuator. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 60. [Google Scholar] [CrossRef]
- Dülk, I.; Kovácsházy, T. A sensorless method for detecting spool position in solenoid actuators. Carpathian J. Electron. Comput. Eng. 2013, 6, 36–43. [Google Scholar]
- Liu, Y.-F.; Dai, Z.-K.; Xu, X.-Y.; Tian, L. Multi-domain modeling and simulation of proportional solenoid valve. J. Central South Univ. 2011, 18, 1589–1594. [Google Scholar] [CrossRef]
- Wu, W.; Wei, C.; Zhou, J.; Hu, J.; Yuan, S. Numerical and experimental nonlinear dynamics of a proportional pressure-regulating valve. Nonlinear Dyn. 2021, 103, 1415–1425. [Google Scholar] [CrossRef]
- Li, B.; Jiao, Z.; Wu, S.; Liu, X. Research on a new direct drive electro-hydraulic proportional pressure valve for aircraft braking system. In Proceedings of the 2016 IEEE/CSAA International Conference on Aircraft Utility Systems(AUS), Beijing, China, 10–12 October 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 1192–1196. [Google Scholar] [CrossRef]
- Chen, C.-P.; Chiang, M.-H. Development of Proportional Pressure Control Valve for Hydraulic Braking Actuator of Automobile ABS. Appl. Sci. 2018, 8, 639. [Google Scholar] [CrossRef]
- Ferrari, A.; Pizzo, P.; Rundo, M. Modelling and experimental studies on a proportional valve using an innovative dynamic flow-rate measurement in fluid power systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 2404–2418. [Google Scholar] [CrossRef]
- Mahajan, P.; Kalkundri, P.; Shaikh, A.S. Precision Actuator Control for on/off Type Solenoid Valves using Pid Control Loop. In Proceedings of the IEEE 5th International Conference for Convergence in Technology (I2CT), Pune, India, 29–31 March 2019. [Google Scholar] [CrossRef]
- Ledvoň, M.; Hružík, L.; Bureček, A.; Vašina, M. Static and dynamic characteristics of proportional directional valve. In Proceedings of the 13th International Conference on Experimental Fluid Mechanics (EFM) Planetarium & Stefaniks Observ, Prague, Czech Republic, 13–16 November 2018. Experimental fluid mechanics 2018 (efm18). [Google Scholar] [CrossRef]
- Buono, D.; Senatore, A.; Frosina, E.; Gehlhoff, W.; Costin, I.I. Simulation and Experimental Investigations of a Digital High Speed Close Loop Proportional Directional Valve Using a Solenoid Technology. In Proceedings of the ASME/BATH 2016 Symposium on Fluid Power and Motion Control, FPMC2016, Bath, UK, 7–9 September 2016. [Google Scholar] [CrossRef]
- Amirante, R.; Catalano, L.A.; Poloni, C.; Tamburrano, P. Fluid-dynamic design optimization of hydraulic proportional directional valves. Eng. Optim. 2014, 46, 1295–1314. [Google Scholar] [CrossRef]
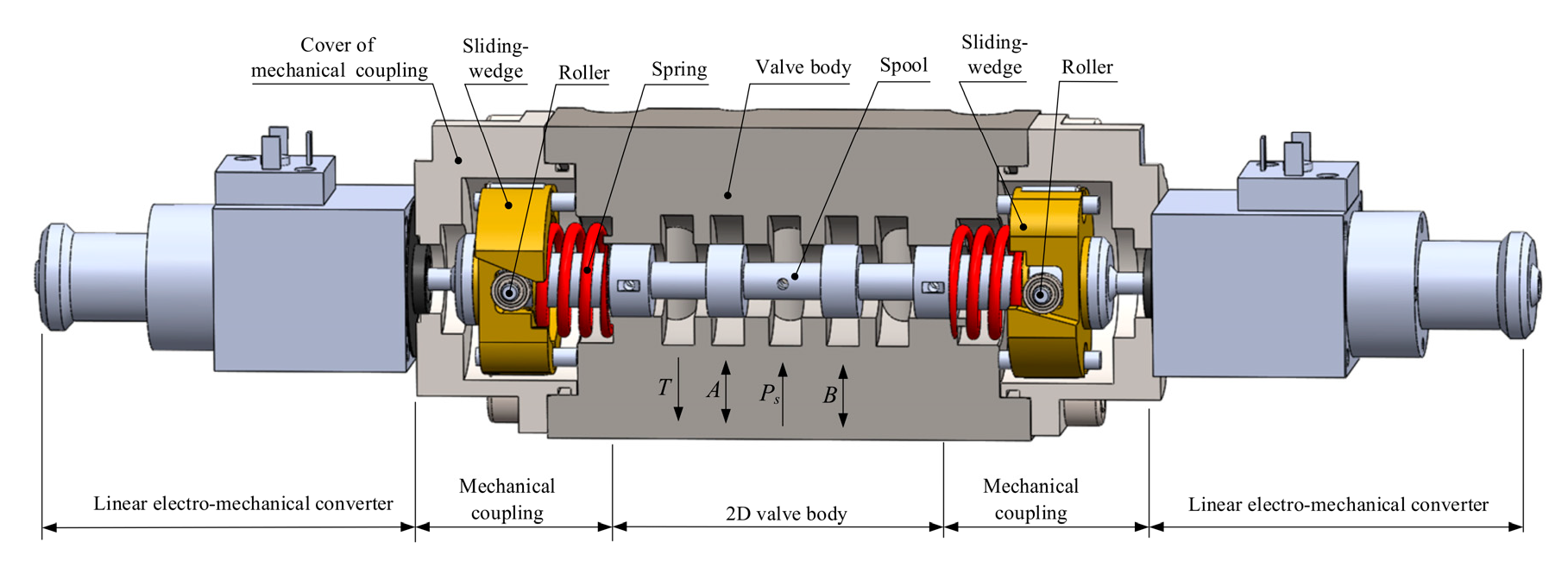
- Zuo, Q.; Sun, J.; Lu, Q.; Ruan, J. Experimental and numerical investigations of the ball-screw-type coupling in two-dimensional electro-hydraulic proportional directional valve. Adv. Mech. Eng. 2018, 10, 1687814018802509. [Google Scholar] [CrossRef]
- Raduenz, H.; Mendoza, Y.E.A.; Ferronatto, D.; Souza, F.J.; Bastos, P.P.d.C.; Soares, J.M.C.; De Negri, V.J. Online fault detection system for proportional hydraulic valves. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 331. [Google Scholar] [CrossRef]
- Gamble, J.B.; Vaughan, N.D. Comparison of Sliding Mode Control with State Feedback and PID Control Applied to a Proportional Solenoid Valve. J. Dyn. Syst. Meas. Control 1996, 118, 434–438. [Google Scholar] [CrossRef]
- Shi, W.; Wei, J.; Fang, J.; Li, M. Nonlinear cascade control of high-response proportional solenoid valve based on an extended disturbance observer. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 921–934. [Google Scholar] [CrossRef]
- Acuña-Bravo, W.; Canuto, E.; Agostani, M.; Bonadei, M. Proportional electro-hydraulic valves: An Embedded Model Control solution. Control Eng. Pr. 2017, 62, 22–35. [Google Scholar] [CrossRef]
- Xie, F.; Zhou, R.; Wang, D.; Ke, J.; Guo, X.; Nguyen, V.X. Simulation Study on Static and Dynamic Characteristics of Electromagnet for Electro-Hydraulic Proportional Valve Used in Shock Absorber. IEEE Access 2020, 8, 41870–41881. [Google Scholar] [CrossRef]
- Lin, Y.Q.; Shi, H.Q. Novel Electro-hydraulic Proportional Valve Based on ARM. Autom. Appl. 2011, 5, 76–78. [Google Scholar]
- Meng, F.; Zhang, H.; Cao, D.; Chen, H. System Modeling, Coupling Analysis, and Experimental Validation of a Proportional Pressure Valve with Pulsewidth Modulation Control. IEEE/ASME Trans. Mechatron. 2016, 21, 1742–1753. [Google Scholar] [CrossRef]
- Meng, F.; Chen, H.; Liu, H.; Han, B.; Nie, X. The optimisation of a proportional solenoid valve design for heavy vehicle active suspension system. Int. J. Veh. Des. 2015, 68, 180. [Google Scholar] [CrossRef]
- Meng, F.; Tao, G.; Zhang, M.R.; Chen, H.Y. Optimization design and analysis of high speed wet proportional solenoid valve. Binggong Xuebao/Acta Armamentarii 2014, 35, 590–596. [Google Scholar] [CrossRef]
- Jiang, H.X. Research of Control Valve and Drive Strategy for Electrohydraulic Proportional Shift Control System of High Powre AT. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2019. [Google Scholar]
- Tian, H.; Zhao, Y. Coil Inductance Model Based Solenoid on–off Valve Spool Displacement Sensing via Laser Calibration. Sensors 2018, 18, 4492. [Google Scholar] [CrossRef]
- Hao, Y.; Quan, L.; Qiao, S.; Lianpeng, X.; Wang, X. Coordinated Control and Characteristics of an Integrated Hydraulic–Electric Hybrid Linear Drive System. IEEE/ASME Trans. Mechatron. 2022, 27, 1138–1149. [Google Scholar] [CrossRef]
- Yuan, Y.F.; Tao, G.L.; Liu, H.; Ban, W. Study of a Bidirectional Proportional Electromagnet. In Proceedings of the 2012 International Conference on Mechatronics and Control Engineering (ICMCE), Guangzhou, China, 29–30 November 2012; pp. 155–158. [Google Scholar] [CrossRef]
- Kim, D.S.; Lee, W.H.; Choi, B.O. Development of direct drive type pneumatic servo valve. In Proceedings of the 6th JFPS In-ternational Symposium on Fluid Power, Tsukuba, Japan, 7–10 November 2005. [Google Scholar]
- Li, Q.P.; Fang, P.; Ding, F. New Bi-directional proportional electro-mechanical converter. Chin. Hydraul. Pneum. 2005, 12, 62–63. [Google Scholar]
- Carpenter, R.; Fales, R. Mixed Sensitivity H-Infinity Control Design with Frequency Domain Uncertainty Modeling for a Pilot Operated Proportional Control Valve. In Proceedings of the ASME 2012 5th Annual Dynamic Systems and Control Conference Joint with the JSME 2012 11th Motion and Vibration Conference(DSCC 2012-MOVIC 2012), Fort Lauderdale, FL, USA, 17–19 October 2012; pp. 733–741. [Google Scholar] [CrossRef]
- Moustafa, N.; Fales, R. Stability of a Proportional Valve Control System with Backlash and Saturation. In Proceedings of the ASME/BATH 2013 Symposium on Fluid Power and Motion Control (FPMC), Fort Lauderdale, FL, USA, 6–9 October 2013. [Google Scholar] [CrossRef]
- Fan, X.; Fang, M.; He, Y.; Song, T. Modeling and dynamic analysis of a pilot-operated pressure-regulating solenoid valve used in automatic transmission with bond graphs. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 372. [Google Scholar] [CrossRef]
- Meng, F.; Zhang, H.; Cao, D.; Chen, H. System Modeling and Pressure Control of a Clutch Actuator for Heavy-Duty Automatic Transmission Systems. IEEE Trans. Veh. Technol. 2016, 65, 4865–4874. [Google Scholar] [CrossRef]
- Ouyang, T.; Li, S.; Huang, G.; Zhou, F.; Chen, N. Mathematical modeling and performance prediction of a clutch actuator for heavy-duty automatic transmission vehicles. Mech. Mach. Theory 2019, 136, 190–205. [Google Scholar] [CrossRef]
- Quan, L. A New Kind of Pilot Controlled Proportional Direction Valve with Internal Flow Feedback. Chin. J. Mech. Eng. 2010, 23, 60–65. [Google Scholar] [CrossRef]
- Zuo, Q.; Lu, Q.; Li, S.; Xing, T.; Ruan, J. Dynamic characteristics of 2D electro-hydraulic proportional directional valves with a ball-screw type axial compression-torsion coupling. China Mech. Eng. 2017, 28, 2049–2055. [Google Scholar]
- Ye, Q.; Chen, J. Dynamic analysis of a pilot-operated two-stage solenoid valve used in pneumatic system. Simul. Model. Pr. Theory 2009, 17, 794–816. [Google Scholar] [CrossRef]
- Li, Y.; Ding, F.; Shen, Y.D. Steady-state characteristics of proportional pilot-operated relief valve with low power consumption. China Mech. Eng. 2010, 21, 2921–2924. [Google Scholar]
- Shi, W.; Wei, J.; Fang, J.; Li, M.; Zhang, Q.; Qiao, X. Pressure Control of the Proportional Directional Control Valve Test Rig Based on the Fuzzy Proportional-Integral-Double-Integral Controller. In Proceedings of the ASME/BATH 2017 Symposium on Fluid Power and Motion Control (FPMC2017), Sarasota, FL, USA, 16–19 October 2017. [Google Scholar]
- He, L.H.; Liu, L. Study on drive and control technology of proportional valve for vehicle. J. Hunan Inst. Engi-Neering 2007, 4, 27–30. [Google Scholar] [CrossRef]
- Huang, Y. Design of A New Electro-Hydraulic Proportional Valve and Study of Its Control Method. Master’s Thesis, Hunan University, Changsha, China, 2007. [Google Scholar]
- Wang, H.; Wang, X.; Huang, J.; Wang, J.; Quan, L. A Novel Control Strategy for Pilot Controlled Proportional Flow Valve with Internal Displacement-Flow Feedback. J. Dyn. Syst. Meas. Control 2018, 140, 111014. [Google Scholar] [CrossRef]
- Wang, H.; Wang, X.; Huang, J.; Quan, L. Flow Control for a Two-Stage Proportional Valve with Hydraulic Position Feedback. Chin. J. Mech. Eng. 2020, 33, 93. [Google Scholar] [CrossRef]
- Liu, W.; Wei, J.; Fang, J.; Li, S. Hydraulic-feedback proportional valve design for construction machinery. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 3162–3178. [Google Scholar] [CrossRef]
- Wang, H.; Wang, X.; Huang, J.; Quan, L. Performance Improvement of a Two-Stage Proportional Valve with Internal Hydraulic Position Feedback. J. Dyn. Syst. Meas. Control 2021, 143, 071005. [Google Scholar] [CrossRef]
- Huang, J.; Dai, J.; Quan, L.; Lan, Y. Performance of Proportional Flow Valve with Pilot Pressure Drop—Spool Opening Compensation. J. Dyn. Syst. Meas. Control 2017, 139, 011009. [Google Scholar] [CrossRef]
- D’Amore, M.; Pellegrinetti, G. Dissecting high-performance electrohydraulic valves. Mach. Des. 2001, 73, 84. [Google Scholar]
- Lisowski, E.; Filo, G.; Rajda, J. Pressure compensation using flow forces in a multi-section proportional directional control valve. Energy Convers. Manag. 2015, 103, 1052–1064. [Google Scholar] [CrossRef]
- DeRose, D. Typical Proportional and Servo Valve Control Systems. Fluid Power J. 2003, 10, 8–15. [Google Scholar]
- Amirante, R.; Distaso, E.; Tamburrano, P. Sliding spool design for reducing the actuation forces in direct operated proportional directional valves: Experimental validation. Energy Conv. Manag. 2016, 119, 399–410. [Google Scholar] [CrossRef]
- Tic, V.; Rotovnik, A.; Lovrec, D. Impact of Proportional Valves’ Differences to Ensure Uniform Motion of Hydraulic Motors. Int. J. Simul. Model. 2021, 20, 52–63. [Google Scholar] [CrossRef]
- Jin, B.; Zhu, Y.-G.; Li, W.; Zhang, D.-S.; Zhang, L.-L.; Chen, F.-F. A differential control method for the proportional directional valve. J. Zhejiang Univ. Sci. C 2014, 15, 892–902. [Google Scholar] [CrossRef]
- Xiong, Y.; Wei, J.; Feng, R. Adaptive robust control of a high-response dual proportional solenoid valve with flow force compensation. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2015, 229, 3–26. [Google Scholar] [CrossRef]
- Zhu, Y.; Jin, B. Analysis and modeling of a proportional directional valve with nonlinear solenoid. J. Braz. Soc. Mech. Sci. Eng. 2016, 38, 507–514. [Google Scholar] [CrossRef]
- Lee, I.-Y.; Oh, D.-H.; Ji, S.-W.; Yun, S.-N. Control of an overlap-type proportional directional control valve using input shaping filter. Mechatronics 2015, 29, 87–95. [Google Scholar] [CrossRef]
- Owczarek, P.; Rybarczyk, D.; Kubacki, A. Dynamic Model and Simulation of Electro-Hydraulic Proportional Valve. In Proceedings of the International Conference on Automation, Warsaw, Poland, 15–17 March 2017; pp. 99–107. [Google Scholar] [CrossRef]
- Braun, T.; Reuter, J.; Rudolph, J. Position Observation for Proportional Solenoid Valves by Signal Injection. In Proceedings of the 7th IFAC Symposium on Mechatronic Systems (MECHATRONICS) Loughborough Univ, Leicestershire, UK, 5–8 September 2016; pp. 74–79. [Google Scholar] [CrossRef]
- Bayat, F.; Tehrani, A.F.; Danesh, M. Finite element analysis of proportional solenoid characteristics in hydraulic valves. Int. J. Automot. Technol. 2012, 13, 809–816. [Google Scholar] [CrossRef]
- Zavarehi, M.K.; Lawrence, P.; Sassani, F. Nonlinear modeling and validation of solenoid-controlled pilot-operated servovalves. IEEE/ASME Trans. Mechatron. 1999, 4, 324–334. [Google Scholar] [CrossRef]
- Hanson, N. Hydraulic Proportional and Closed Loop System Design; Lohr a. Main; Tech. Rep.; Bosch Rexroth: Horb am Neckar, Germany, 2010. [Google Scholar]
- Hanson, N. Selecting Proportional Valves and High Response Valves; Rexroth Bosch Group: Lohr am Main, Germany, 2010. [Google Scholar]
- Saleem, S. Pilot Operated Cartridge Valve-Dynamic Characteristics Measurements for Energy Efficient Operation and Application. Master’s Thesis, Aalto University School of Engineering, Aalto, Finland, 2018. [Google Scholar]
- Xu, B.; Su, Q.; Zhang, J.; Lu, Z. A dead-band model and its online detection for the pilot stage of a two-stage directional flow control valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 639–654. [Google Scholar] [CrossRef]
- Xu, B.; Su, Q.; Zhang, J.; Lu, Z. Analysis and compensation for the cascade dead-zones in the proportional control valve. ISA Trans. 2017, 66, 393–403. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Zhang, J.; Xu, B.; Wang, D.; Su, Q.; Qian, J.; Yang, G.; Pan, M. Deadzone compensation control based on detection of micro flow rate in pilot stage of proportional directional valve. ISA Trans. 2019, 94, 234–245. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Lu, Z.; Xu, B.; Su, Q. Investigation on the dynamic characteristics and control accuracy of a novel proportional directional valve with independently controlled pilot stage. ISA Trans. 2019, 93, 218–230. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wang, D.; Xu, B.; Lu, Z.; Gan, M.; Su, Q. Modeling and Experimental Validation of the Time Delay in a Pilot Operated Proportional Directional Valve. IEEE Access 2018, 6, 30355–30369. [Google Scholar] [CrossRef]
- Meng, B.; Zhu, C.; Xu, H.; Dai, M.; Li, S. Analytical and Experimental Investigations of Novel Maglev Coupling Based on Opposed Halbach Array for a 2D Valve. Actuators 2021, 10, 61. [Google Scholar] [CrossRef]
- Angelov, I.; Kamberov, K.; Mitov, A.; Ivanov, T. Implementation of Piezoelectric Actuators for Pilot Valve of High Response Hydraulic Servo Valve. In Proceedings of the 4th European-Alliance-for-Innovation (EAI) International Conference on Future Access Enablers of Ubiquitous and Intelligent Infrastructures (FABULOUS), Sofia, Bulgaria, 28–29 March 2019; pp. 318–326. [Google Scholar] [CrossRef]
- Park, Y.-J.; Kim, B.-G.; Jeon, J.-C.; Jung, D.; Choi, S.-B. The Effect of Spool Displacement Control to the Flow Rate in the Piezoelectric Stack-Based Valve System Subjected to High Operating Temperature. Actuators 2021, 10, 239. [Google Scholar] [CrossRef]
- Zhang, Z.M.; Gong, Y.J.; Hou, J.Y.; Li, G.; Wu, H.P.; Wang, Z.W. Design and static experiments of water hydraulic throttle valve with direct piezoelectric actuation. Mei T’an Hsueh Pao/J. China Coal. Soc. 2014, 39, 583–588. [Google Scholar] [CrossRef]
- Stefanski, F.; Minorowicz, B.; Persson, J.; Plummer, A.; Bowen, C. Non-linear control of a hydraulic piezo-valve using a generalised Prandtl–Ishlinskii hysteresis model. Mech. Syst. Signal Process. 2017, 82, 412–431. [Google Scholar] [CrossRef]
- Murrenhoff, H. Innovative Designs and Control Circuits for Proportional Valves. In Proceedings of the SAE International Off-Highway Congress-Colocated with CONEXPO-CON/AGG, Las Vegas, NV, USA, 19–21 March 2002. [Google Scholar] [CrossRef]
- Tamburrano, P.; Amirante, R.; Distaso, E.; Plummer, A.R. Full simulation of a piezoelectric double nozzle flapper pilot valve coupled with a main stage spool valve. In Proceedings of the 73rd Conferengy Proce of the Italdian-Thermal-Machines-Engineering-Association (ATI), Pisa, Italy, 12–14 September 2018; pp. 487–494. [Google Scholar] [CrossRef]
- Sangiah, D.K.; Plummer, A.R.; Bowen, C.R.; Guerrier, P. Modelling and Experimental Validation of a Novel Piezohydraulic Servovalve. In Proceedings of the ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium on Fluid Power and Motion Control, DSCC 2011, Arlington, VA, USA, 31 October–2 November 2011; American Society of Mechanical Engineers (ASME): New York, NY, USA, 2011; pp. 343–350. [Google Scholar] [CrossRef]
- Wang, X.; Li, W.; Ruan, Z.; Zheng, J.; Sun, S. Research on Properties of Water Hydraulic Servo Valve Driven by Diphase Oppositing Giant Magnetostrictive Actuator. In Proceedings of the International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 13–14 March 2010; pp. 143–146. [Google Scholar] [CrossRef]
- Zhou, R.; Meng, L.; Yuan, X. Experimental Test and Feasibility Analysis of Hydraulic Cylinder Position Control Based on Pressure Detection. Processes 2022, 10, 1167. [Google Scholar] [CrossRef]
- Fu, Y.L.; Zhou, G.Z. Research on valve and pump combined control of digital actuator. In Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition (IMECE), San Diego, CA, USA, 15–21 November 2013; ASME: New York, NY, USA, 2013. [Google Scholar]
- Su, L.; Xue, F. Spool limit electro-hydraulic digital valve control system and position precision control. Hydraul. Pneum. Seals 2022, 42, 53–56. [Google Scholar] [CrossRef]
- Rybarczyk, D. Concept and modelling of the electrohydraulic valve with DC and stepper motors. In Proceedings of the 3rd InMATErnationalC Web Conference of Computational Methods in Engineering Science (CMES), Kazimierz Dolny, Poland, 22–24 November 2018. [Google Scholar] [CrossRef]
- Rybarczyk, D.; Milecki, A. Electrohydraulic Drive with a Flow Valve Controlled by a Permanent Magnet Synchronous Motor. Trans. FAMENA 2020, 44, 31–44. [Google Scholar] [CrossRef]
- Milecki, A.; Ortmann, J. Electrohydraulic linear actuator with two stepping motors controlled by overshoot-free algorithm. Mech. Syst. Signal Process. 2017, 96, 45–57. [Google Scholar] [CrossRef]
- Milecki, A.; Ortmann, J. Influences of Control Parameters on Reduction of Energy Losses in Electrohydraulic Valve with Stepping Motors. Energies 2021, 14, 6114. [Google Scholar] [CrossRef]
- Milecki, A.; Rybarczyk, D. Modelling of an Electrohydraulic Proportional Valve with a Synchronous Motor. Strojniski Vestn-J. Mech. Eng. 2015, 61, 517–522. [Google Scholar] [CrossRef]
- Owczarek, P.; Rybarczyk, D.; Gośliński, J.; Owczarkowski, A. The High-Resolution Camera in Estimation of the Position of the Hydraulic Valve Spool. Adv. Intell. Syst. Comput. 2014, 267, 623–630. [Google Scholar] [CrossRef]
- Sheng, L.; Jian, R.; Bin, M. Research for the characteristics of electro-mechanical converter for 2D digital servo valve. In Proceedings of the IEEE 10th International Conference on Industrial Informatics, INDIN 2012, Beijing, China, 25–27 July 2012; pp. 719–724. [Google Scholar]
- Nguyen, T.H.; Do, T.C.; Ahn, K.K. Independent metering valve: A review of advances in hydraulic machinery. J. Drive Control. 2020, 17, 54–71. [Google Scholar]
- Suzuki, K.; Akazawa, S.; Nakao, Y. Development of Cam-Drive Type Proportional Valve for Water Hydraulics. Int. J. Autom. Technol. 2012, 6, 450–456. [Google Scholar] [CrossRef]
- Meng, B.; Xu, H.; Liu, B.; Dai, M.; Zhu, C.; Li, S. Novel Magnetic Circuit Topology of Linear Force Motor for High Energy Utilization of Permanent Magnet: Analytical Modelling and Experiment. Actuators 2021, 10, 32. [Google Scholar] [CrossRef]
- Bang, Y.-B.; Lee, K.-I.; Joo, C.-S.; Hur, J.-W. Two-stage electrohydraulic servovalve using stack-type piezoelectric elements. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2004, 218, 53–65. [Google Scholar] [CrossRef]
- Ye, R.K. Research on a two-Way Electro-Hydraulic Cartridge Throttle Valve with Spool Position Electrical Feedback. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2018. [Google Scholar]
- Plummer, A. Electrohydraulic servovalves–past, present, and future. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Meng, B.; Dai, M.; Zhu, C.; Zhang, C.; Ding, C.; Ruan, J. Analytical Modelling and Experiment of Novel Rotary Electro-Mechanical Converter with Negative Feedback Mechanism for 2D Valve. Chin. J. Mech. Eng. 2022, 35, 122. [Google Scholar] [CrossRef]
- Meng, B.; Dai, M.; Zhu, C.; Xu, H.; Jia, W.; Li, S. Investigation of Characteristics of a Novel Torque Motor Based on an Annulus Air Gap. Machines 2021, 9, 131. [Google Scholar] [CrossRef]
- Meng, B.; Zhu, L.; Heng, Y.; Xu, H.; Li, S.; Ruan, J. Investigation on flat torque-angle characteristic of torque motor based on magnetic saturation of tooth tip. IET Power Electron. 2023, 16, 357–374. [Google Scholar] [CrossRef]
- Gastaldi, L.; Pastorelli, S.; Sorli, M. Static and Dynamic Experimental Investigation of a Pneumatic Open Loop Proportional Valve. Exp. Tech. 2016, 40, 1377–1385. [Google Scholar] [CrossRef]
- Nielsen, B. Controller Development for a Separate Meter-In Separate Meter-Out Fluid Power Valve for Mobile Applications. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2023. [Google Scholar]
- Han, M.; Liu, Y.; Zheng, K.; Ding, Y.; Wu, D. Investigation on the modeling and dynamic characteristics of a fast-response and large-flow water hydraulic proportional cartridge valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 4415–4432. [Google Scholar] [CrossRef]
- Han, M.; Liu, Y.; Liao, Y.; Wang, S. Investigation on the Modeling and Dynamic Characteristics of a Novel Hydraulic Proportional Valve Driven by a Voice Coil Motor. Strojniski Vestn.-J. Mech. Eng. 2021, 67, 223–234. [Google Scholar] [CrossRef]
- Baoren, L.; Longlong, G.; Gang, Y. Modeling and Control of a Novel High-Pressure Pneumatic Servo Valve Direct-Driven by Voice Coil Motor. J. Dyn. Syst. Meas. Control. 2013, 135, 014507. [Google Scholar] [CrossRef]
- Miyajima, T.; Fujita, T.; Sakaki, K.; Kawashima, K.; Kagawa, T. Development of a digital control system for high-performance pneumatic servo valve. Precis. Eng. 2007, 31, 156–161. [Google Scholar] [CrossRef]
- Kawashima, K.; Arai, T.; Tadano, K.; Fujita, T.; Kagawa, T. Development of coarse/fine dual stage using pneumatically driven bellows actuator and cylinder with air bearings. Precis. Eng. 2010, 34, 526–533. [Google Scholar] [CrossRef]
- Zhang, Z.M.; Meng, F.Y.; Hou, J.Y.; Wu, H.P.; Ning, D.Y.; Gong, S.J. Design, simulation and experiments of water hydraulic throttle valve with direct voice coil motor actuation. Mei T’an Hsueh Pao/J. China Coal. Soc. 2017, 42, 275–281. [Google Scholar] [CrossRef]
- Xu, X.; Quan, L.; Wang, X. New High Performance Electro-hydraulic Proportional Valve and Its Performance. J. Mech. E 2020, 56, 233–238. [Google Scholar] [CrossRef]
- Zhu, J.W.; Xu, X.Q.; Wang, X.P.; Liu, Z.H. Research on two-way proportional controller for electro-hydraulic proportional valve. Chin. Hydraul. Pneum. 2018, 4, 32–36. [Google Scholar] [CrossRef]
- Zhang, L.T.; Xu, X.Q.; Feng, X.G. Electro-hydraulic proportional valve based on moving-coil electro-mechanical transformer. Mach. Tool Hydraul. 2018, 46, 45–48. [Google Scholar] [CrossRef]
- Ledvoň, M.; Polášek, T.; Bureček, A.; Hružík, L. Modeling and dynamic analysis of proportional directional valve. In Proceedings of the 38th Meeting of Departments-of-Fluid-Mechanics-and-Thermodynamics, Liptovsky Mikulas, Slovakia, 19–21 June 2019. [Google Scholar] [CrossRef]
- Lu, L.; Xia, F.Y.; Yin, Y.B.; Yuan, J.Y.; Guo, S.R. Spool stuck mechanism of ball-type rotary direct drive pressure servo valve. Che-chiang Ta Hsueh Hsueh Pao, Kung Hsueh Pan/J. Zhejiang Univ. Eng. Sci. 2019, 53, 1265–1273 and 1339. [Google Scholar] [CrossRef]
- Zhang, H.; Liao, Y.; Tao, Z.; Lian, Z.; Zhao, R. Modeling and Dynamic Characteristics of a Novel High-Pressure and Large-Flow Water Hydraulic Proportional Valve. Machines 2022, 10, 37. [Google Scholar] [CrossRef]
- Li, C. Flow Characteristics of Large Flow and Water Based Electro-Hydraulic Proportional Valve Port for Mining. Master’s Thesis, Taiyuan University of Technology, Taiyuan, China, 2020. [Google Scholar]
- Lux, J.; Habegger, C. New Generation of Intelligent Electromechanical Valve Actuation; RWTH Aachen University: Aachen, Germany, 2018; pp. 395–403. [Google Scholar]
- Gao, Q.; Zhu, Y.; Wu, C.; Jiang, Y. Development of a novel two-stage proportional valve with a pilot digital flow distribution. Front. Mech. Eng. 2021, 16, 420–434. [Google Scholar] [CrossRef]
- Zhong, Q.; Xu, E.-G.; Jia, T.-W.; Yang, H.-Y.; Zhang, B.; Li, Y.-B. Dynamic performance and control accuracy of a novel proportional valve with a switching technology-controlled pilot stage. J. Zhejiang Univ. A 2022, 23, 272–285. [Google Scholar] [CrossRef]
- Gao, Q.; Zhu, Y.; Liu, J. Dynamics Modelling and Control of a Novel Fuel Metering Valve Actuated by Two Binary-Coded Digital Valve Arrays. Machines 2022, 10, 55. [Google Scholar] [CrossRef]
- Kralev, J.; Mitov, A.; Slavov, T. Robust μ-Controller for Hydraulic Spool Valve, Pilot Operated with Switching Micro Valves. Energies 2021, 14, 4817. [Google Scholar] [CrossRef]
- Mitov, A.; Kralev, J.; Slavov, T.; Angelov, I. Analytical Modelling of Hydraulic Proportional Spool Valve Pilot Operated with Switching Micro Valves. In Proceedings of the 6th International Symposium on Environment-Friendly Energies and Applications (EFEA) Tech Univ Sofia, Ctr Res & Design Human Comfort, Energy & Environm, Sofia, Bulgaria, 24–26 March 2021. [Google Scholar] [CrossRef]
- Sitte, A.; Maschinenbau, T.U.D.I.F.M.; Koch, O.; Liu, J.; Tautenhahn, R.; Weber, J. Multidimensional flow mapping for proportional valves. In Proceedings of the 12th International Fluid Power Conference, Dresden, Germany, 12–14 October 2020. [Google Scholar] [CrossRef]
- Wu, R.N.; Yu, Z.Y.; Wang, L. The design of electromagnetic safety cartridge valve with position monitoring. Hydraul. Pneum. Seals 2016, 36, 23–25. [Google Scholar] [CrossRef]
- Xiong, X.; Huang, J. Performance of a flow control valve with pilot switching valve. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 178–194. [Google Scholar] [CrossRef]
- Li, S.M. Research on Nonlinear Correction Method of Digital Control Electro-Hydraulic Proportioanl Cartridge Flow Valve. Ph.D. Thesis, Taiyuan University of Technology, Taiyuan, China, 2015. [Google Scholar]
- Lin, T.; Chen, Q.; Ren, H.; Lv, R.; Miao, C.; Chen, Q. Computational fluid dynamics and experimental analysis of the influence of the energy recovery unit on the proportional relief valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 697–705. [Google Scholar] [CrossRef]
- Lin, T.; Chen, Q.; Ren, H.; Miao, C.; Chen, Q.; Fu, S. Influence of the energy regeneration unit on pressure characteristics for a proportional relief valve. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2017, 231, 189–198. [Google Scholar] [CrossRef]
- Zhao, R.; Liao, Y.; Lian, Z.; Li, R.; Guo, Y. Research on the performance of a novel electro-hydraulic proportional directional valve with position-feedback groove. Proc. Inst. Mech. Eng. Part E J. Process. Mech. Eng. 2021, 235, 1930–1944. [Google Scholar] [CrossRef]
- Salloom, M.Y.; Samad, Z. Magneto-rheological directional control valve. Int. J. Adv. Manuf. Technol. 2012, 58, 279–292. [Google Scholar] [CrossRef]
- Xu, H.; Meng, B.; Zhu, C.; Li, S.; Ruan, J. Novel resonance stability criterion for the 2D magnetically levitated servo-proportional valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 4713–4730. [Google Scholar] [CrossRef]
- Meng, B.; Xu, H.; Ruan, J.; Li, S. Theoretical and experimental investigation on novel 2D maglev servo proportional valve. Chin. J. Aeronaut. 2021, 34, 416–431. [Google Scholar] [CrossRef]
- Wang, X.; Quan, L.; Luan, S.; Xu, X. Dynamic and Static Characteristics of Double Push Rods Electromechanical Converter. Chin. J. Mech. Eng. 2019, 32, 62. [Google Scholar] [CrossRef]
- Chen, J.; Shu, J.P.; Li, M.; Zhou, Q.; Su, Z.M. Research on Novel Self-Spinning High Speed On/Off Valve Based on Fuzzy-Logic Parameter Self-Tuning PID Controller. In Proceedings of the 3rd International Conference on Manufacturing Science and Engineering (ICMSE), Xiamen, China, 27–29 March 2012; pp. 1448–1452. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Number of Solenoids | Solenoid Type | Drive Type | Types of Controlled Valves | Control Method |
|---|---|---|---|---|---|
| Dülk I et al. [13,14,41,42,51,52,53,54,55,65,66] | 1 or 2 | Proportional solenoid | Direct drive or pilot drive | Proportional flow valve | Current or voltage control |
| Wu W et al. [15,16] | 1 | Proportional solenoid | Direct drive | Proportional pressure control valve | Current control |
| Chen CP and Chiang MH [17] | 1 | Proportional solenoid | Direct drive | Proportional pressure control valve | Voltage control |
| Ferrari A et al. [18,71,72,73,74,75,76] | 1 or 2 | Proportional solenoid | Direct drive or pilot drive | Proportional flow directional valve | PWM current control or voltage control |
| Mahajan P et al. [19] | 1 | Proportional solenoid | Direct drive | Switching solenoid valve | PWM voltage control |
| Ledvon M et al. [20,21,22,23,24,44,57,58,59,60,61,62,63,64] | 1 or 2 | Proportional solenoid | Direct drive or pilot drive | Proportional directional valve | PWM voltage control |
| Gamble JB et al. [25,26,27,46,47,48,49,50] | 1 | Proportional solenoid | Direct drive or pilot-driven cone valve | Proportional solenoid valve | PWM voltage control |
| Lin YQ et al. [29,67] | 1 or 2 | Proportional solenoid | Direct drive | Proportional valve | PWM voltage control |
| Meng F et al. [30,31,32,33] | 1 | Proportional solenoid | Direct drive | Ball valve | PWM current control |
| Tian H and Zhao Y [34] | 1 | Switching solenoid | Direct drive | Switching valve | Square wave voltage control |
| Hao YX et al. [35] | 1 | Bi-directional proportional solenoid | Direct drive | Proportional valve | Voltage control |
| Yuan YF et al. [36,37] | 1 | Bi-directional proportional solenoid | Direct drive | Pneumatically controlled hydraulic valve | Current control |
| Li QP et al. [38] | 1 | Bi-directional proportional solenoid | Direct drive | Electro-hydraulic proportional and servo valves | Current control |
| Carpenter R et al. [39,40] | 1 | Proportional solenoid | Pilot drive | Pilot control valve | Voltage control |
| Zuo Q et al. [45,77] | 1 or 2 | Proportional solenoid | Compression–torsion coupling pilot drive | Proportional directional valve | Current control |
| D’Amore M and Pellegrinetti G [56] | 1 | Bi-directional proportional solenoid | Pilot drive | Nozzle–flapper servo valve | Current control |
| Zavarehi M K et al. [68] | 2 | Proportional solenoid | Pilot drive | Electro-hydraulic servo valve | Voltage control |
| Authors | Actuator | Types of Controlled Valves | Drive Type | Number of Actuators | Unidirectional/Bi-directional Drive |
|---|---|---|---|---|---|
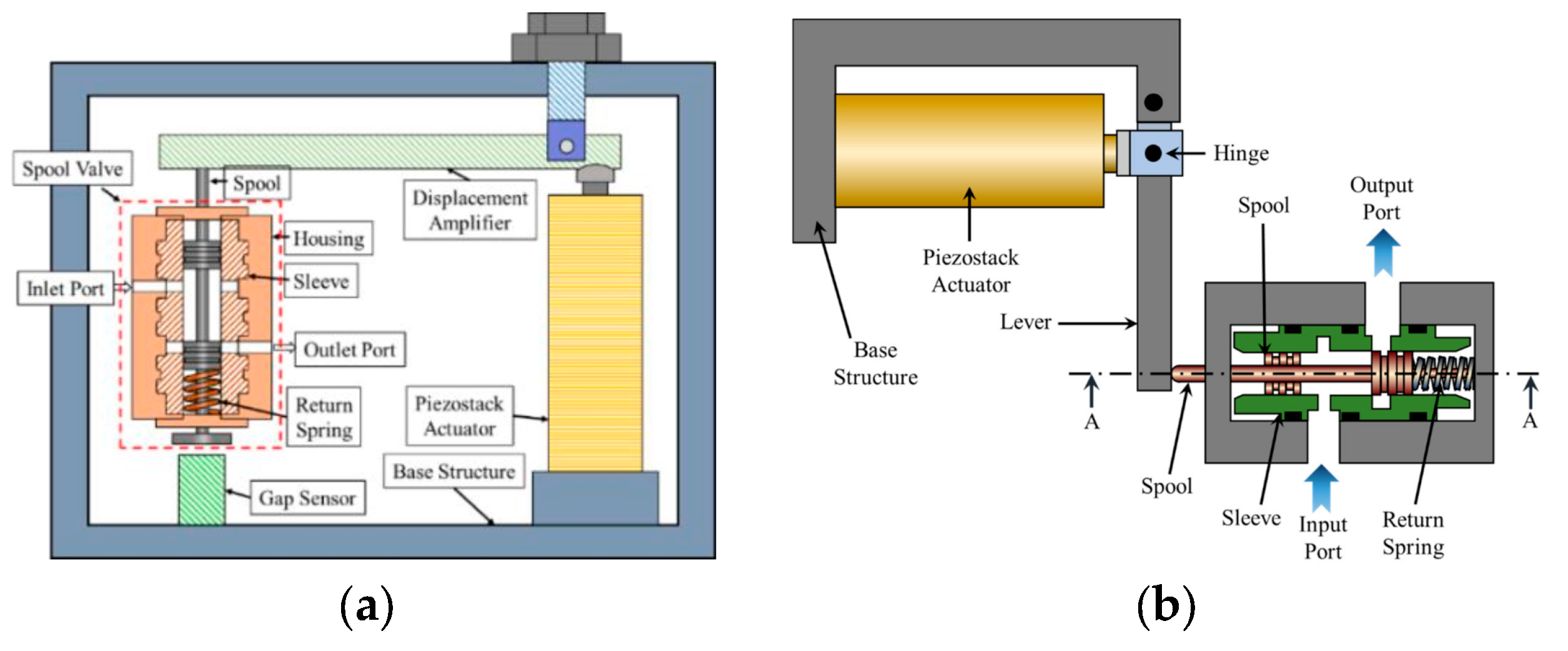
| Han YM et al. [6,11,78,79] | Piezoelectric stacking actuator | Proportional valve | Flexible beam mechanism drive | 1 | Unidirectional drive |
| Zhang ZM et al. [80] | Piezoelectric stacking actuator | Throttle control valve | Direct drive | 1 | Unidirectional drive |
| Stefanski F et al. [81] | Piezoelectric ring bender | Piezoelectric valve | Direct drive | 1 | Bi-directional drive |
| Murrenhoff H [82] | Piezoelectric stacking actuator | Pilot-operated piezoelectric valve | Pilot drive | 2 | Bi-directional drive |
| Tamburrano P et al. [83] | Piezoelectric ring bender | Nozzle–flapper servo valve | Pilot drive | 1 | Bi-directional drive |
| Sangiah DK et al. [84] | Bimorph actuator | Nozzle–flapper servo valve | Pilot drive | 1 | Bi-directional drive |
| Wang XH et al. [85] | Magnetostrictive actuator | Nozzle–flapper servo valve | Pilot drive | 2 | Bi-directional drive |
| Authors | Actuator | Types of Controlled Valves | Number of Actuators | Unidirectional/Bi-Directional Drive |
|---|---|---|---|---|
| Gao Q et al. [121] | High-speed switching valve | Nozzle–flapper valve | 2 | Bi-directional drive |
| Zhong Q et al. [122] | High-speed switching valve | Pilot-operated proportional valve | 2 | Bi-directional drive |
| Zhong Q et al. [123] | Digital valve | Fuel metering valve | 10 | Bi-directional drive |
| Kralev J et al. [124,125] | Micro-valve | Proportional valve | 4 | Bi-directional drive |
| Sitte A et al. [126] | Pilot proportional valve | Seat type proportional valve | 1 | Bi-directional drive |
| Xiong XY and Huang JH [128] | Switching valve | Two-stage proportional flow control valve | 1 | Bi-directional drive |
| Li SM [129] | Switching valve | Bi-directional Valvistor valve | 2 | Bi-directional drive |
| Lin TL et al. [130,131] | Proportional pressure reducing valve | Pilot-operated proportional relief valve | 1 | Bi-directional drive |
| Zhao RH et al. [132] | Switching valve and proportional valve | Proportional directional valve | 2 | Bi-directional drive |
| Salloom MY and Samad Z [133] | Magnetorheological valve | Proportional directional valve | 4 | Unidirectional drive |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, R.; Yang, J.; Yu, X.; Xu, J. Review of Recent Advances in the Drive Method of Hydraulic Control Valve. Processes 2023, 11, 2537. https://doi.org/10.3390/pr11092537
Li Y, Li R, Yang J, Yu X, Xu J. Review of Recent Advances in the Drive Method of Hydraulic Control Valve. Processes. 2023; 11(9):2537. https://doi.org/10.3390/pr11092537
Chicago/Turabian StyleLi, Yanchao, Ruichuan Li, Junru Yang, Xiaodong Yu, and Jikang Xu. 2023. "Review of Recent Advances in the Drive Method of Hydraulic Control Valve" Processes 11, no. 9: 2537. https://doi.org/10.3390/pr11092537
APA StyleLi, Y., Li, R., Yang, J., Yu, X., & Xu, J. (2023). Review of Recent Advances in the Drive Method of Hydraulic Control Valve. Processes, 11(9), 2537. https://doi.org/10.3390/pr11092537