

Simulation Study on Dynamic Characteristics of the Chain Drive System for Mining Scraper Conveyor Driven by the Permanent Magnet Synchronous Motor

Abstract
:
1. Introduction
2. Model of Scraper Conveyor Chain Drive System
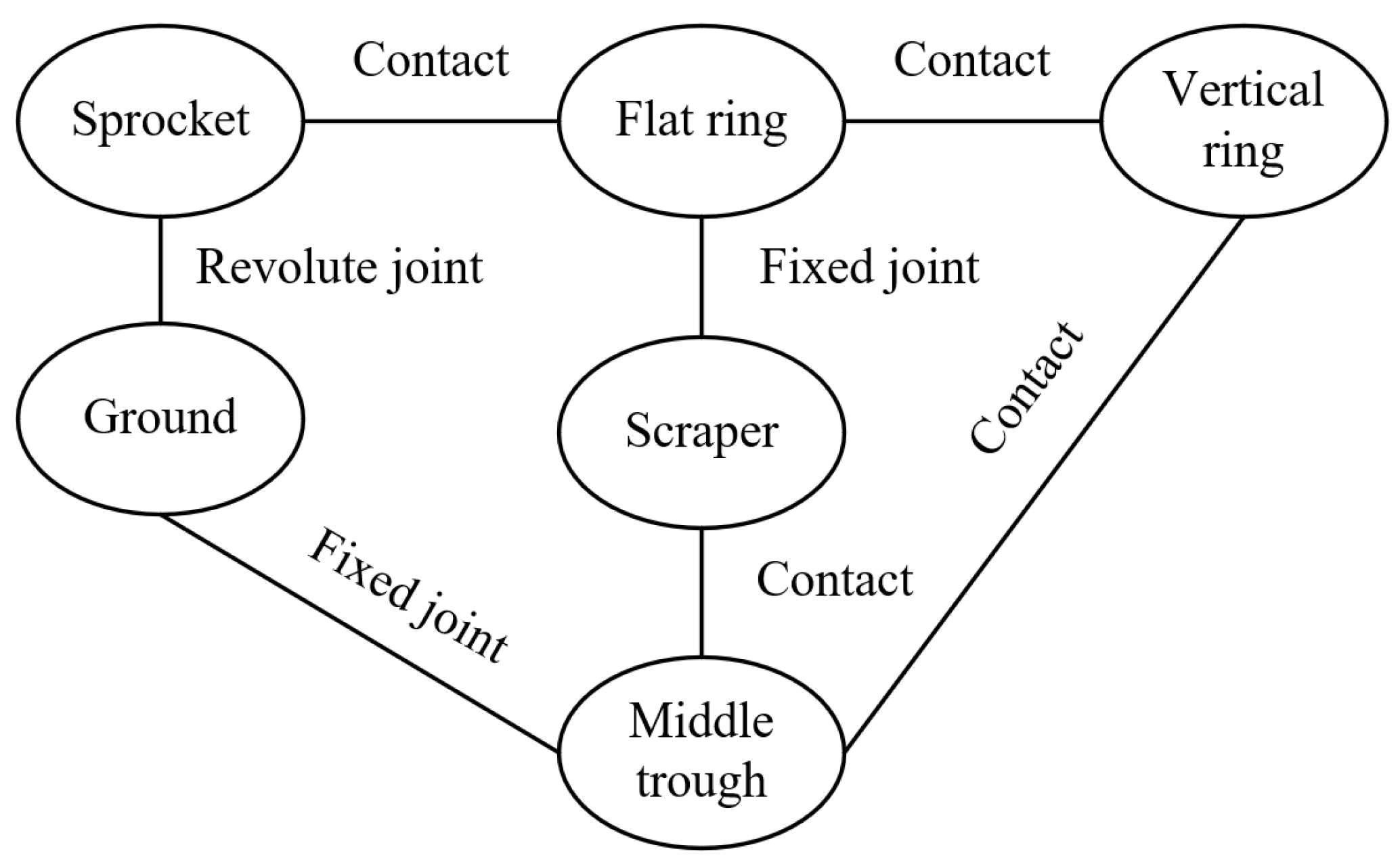
2.1. Modeling Process
2.2. Setting and Calculation of the Simulation Parameters
2.2.1. Calculation of Contact Force
2.2.2. Restriction Setting
2.2.3. Calculation of Resistance
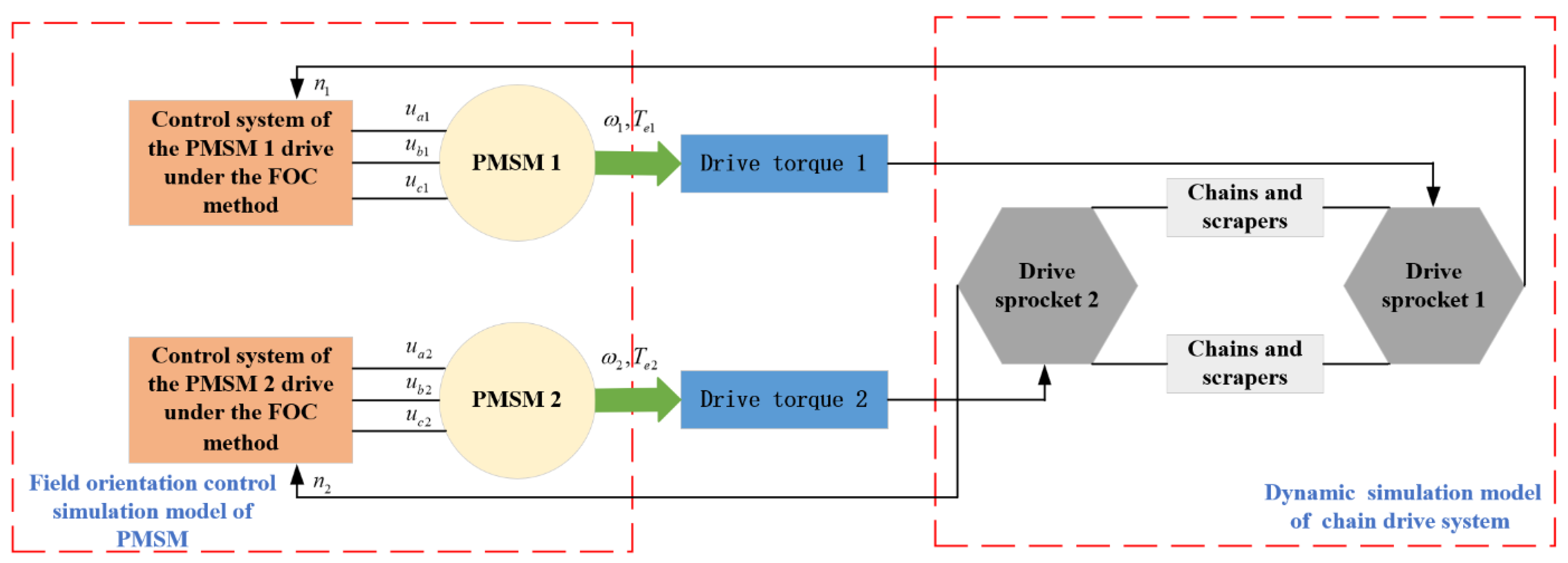
3. Design of PMSM-Driven System for Scraper Conveyor
3.1. Mathematical Model of the PMSM
3.2. Design of Sliding Mode Speed Controller
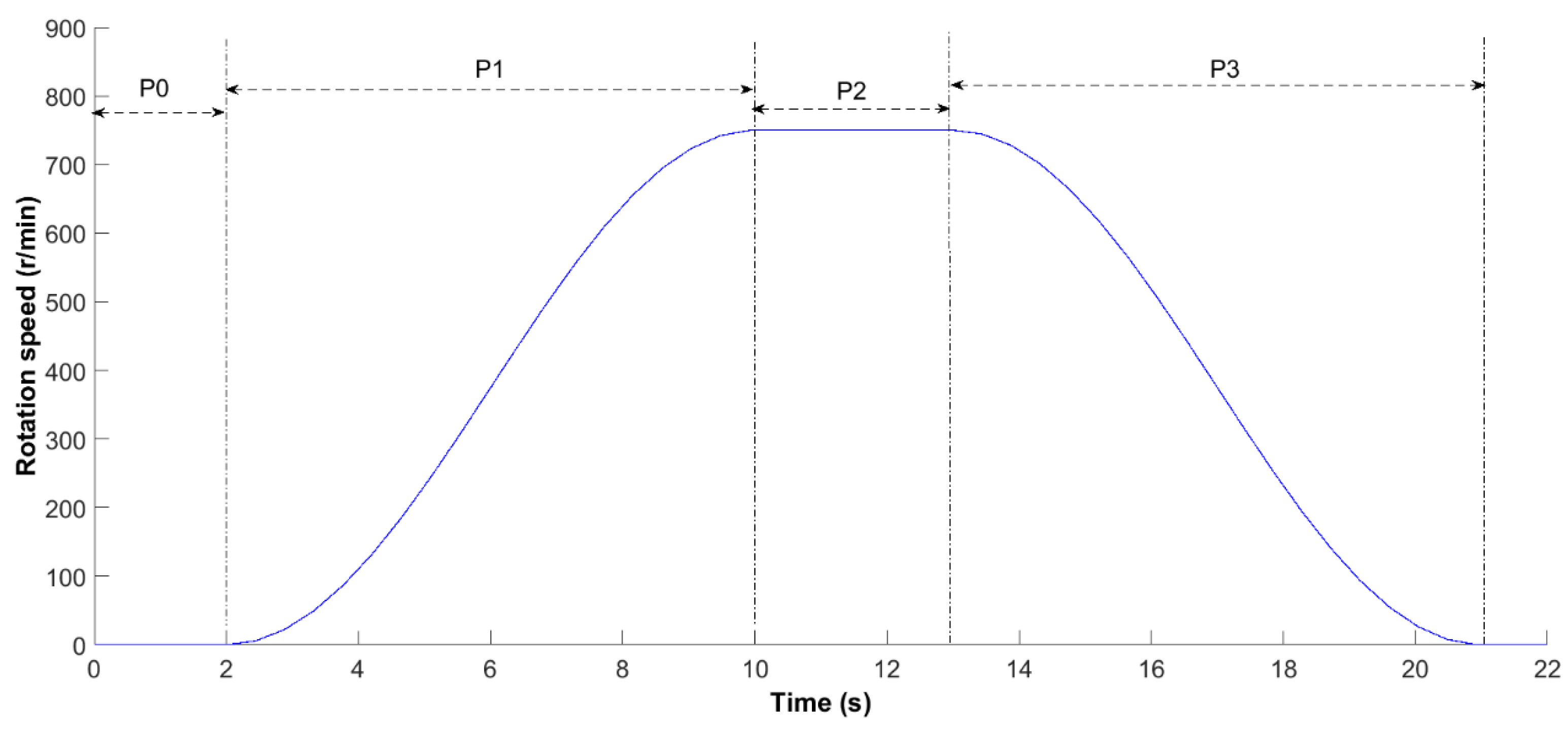
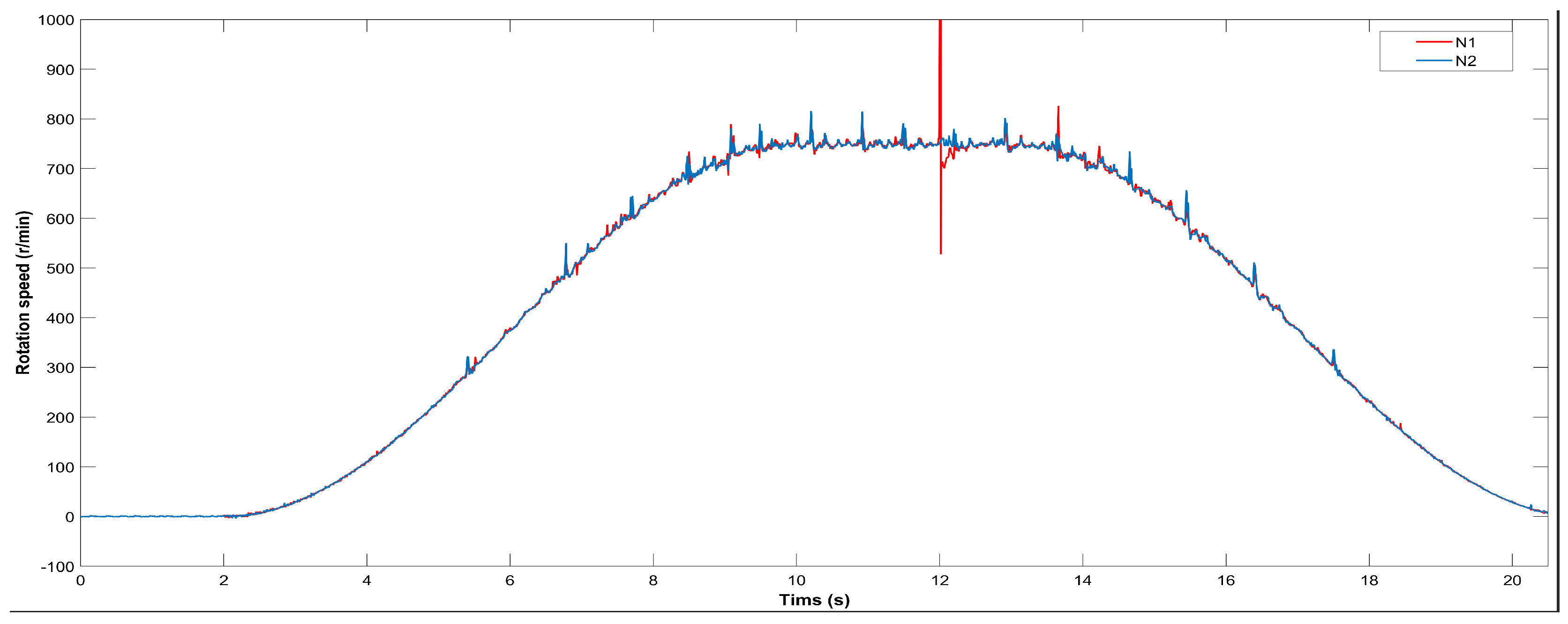
4. Simulation and Analysis under Typical Working Conditions
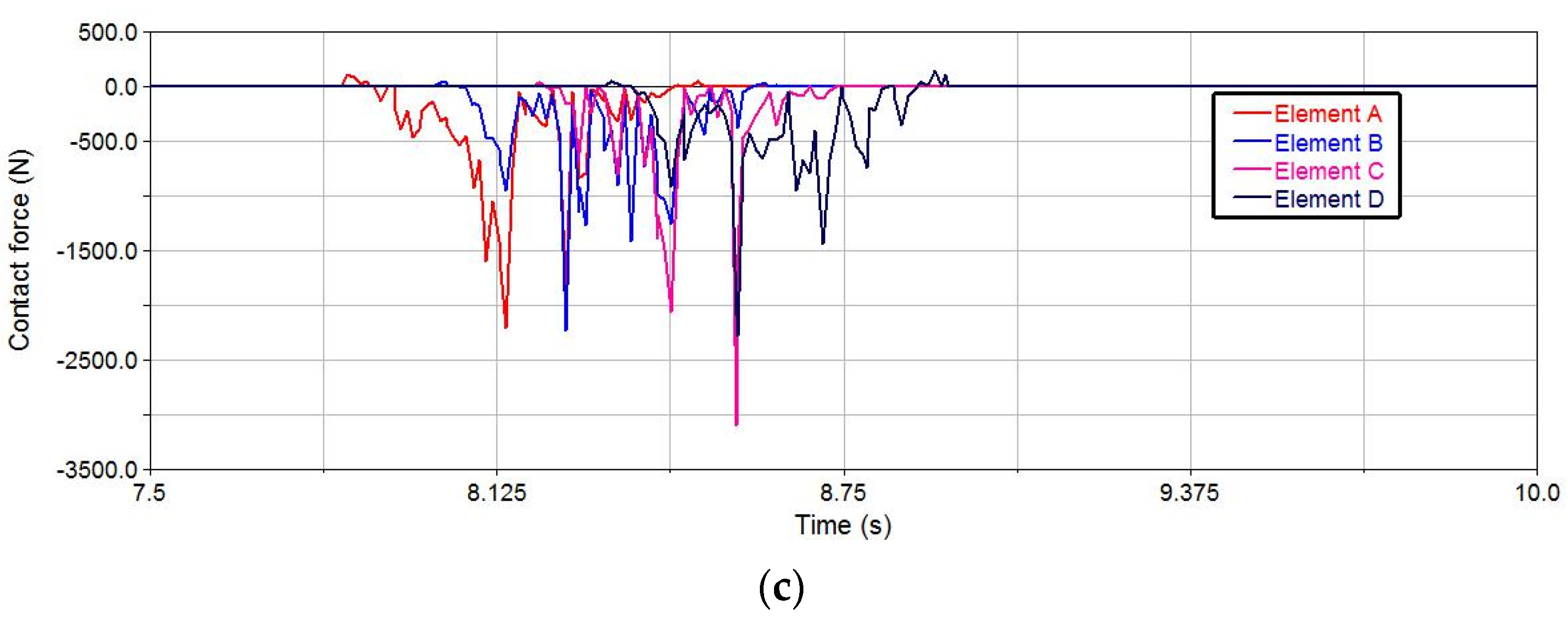
4.1. No-Load Condition
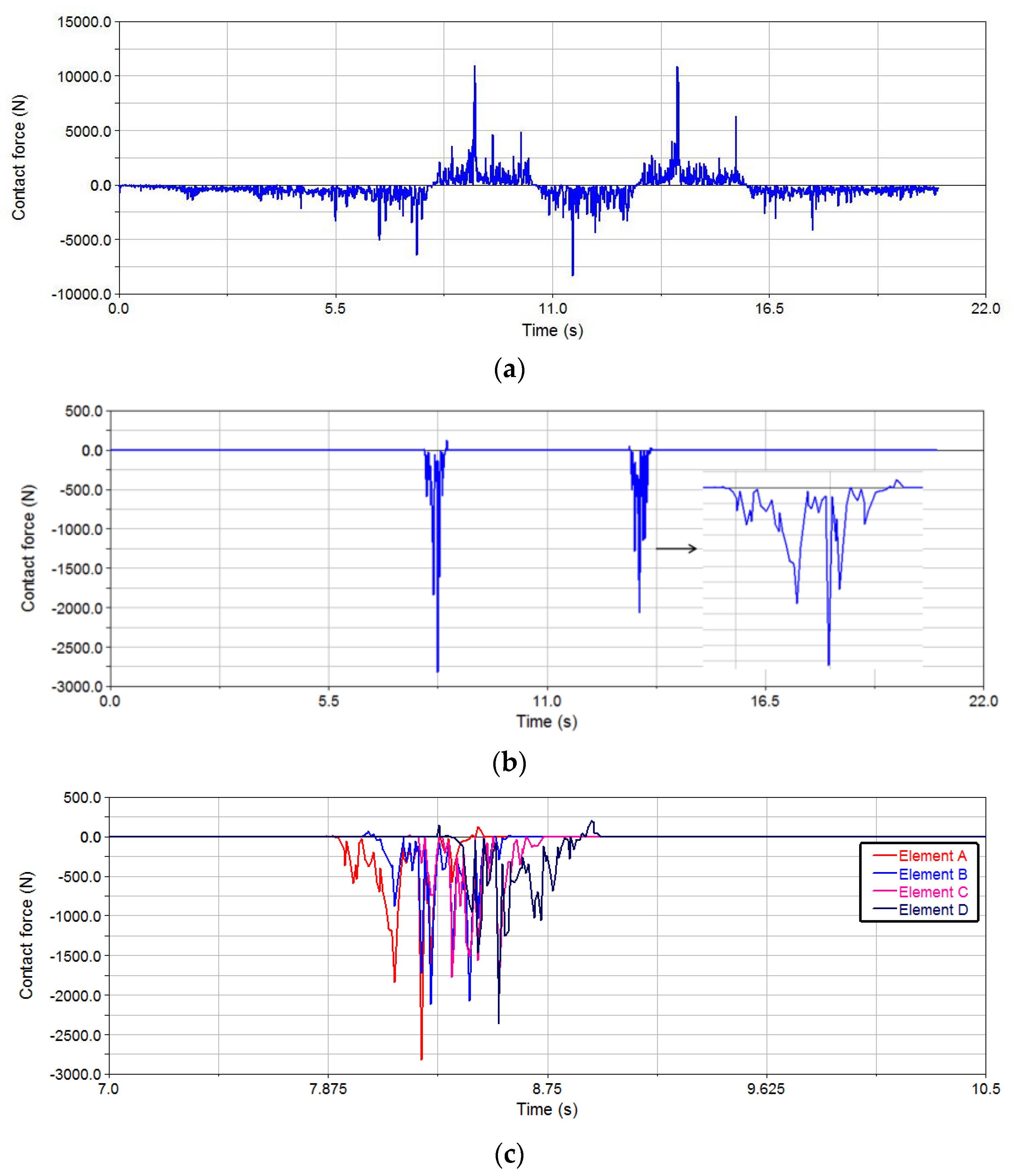
4.2. Half-Load Condition
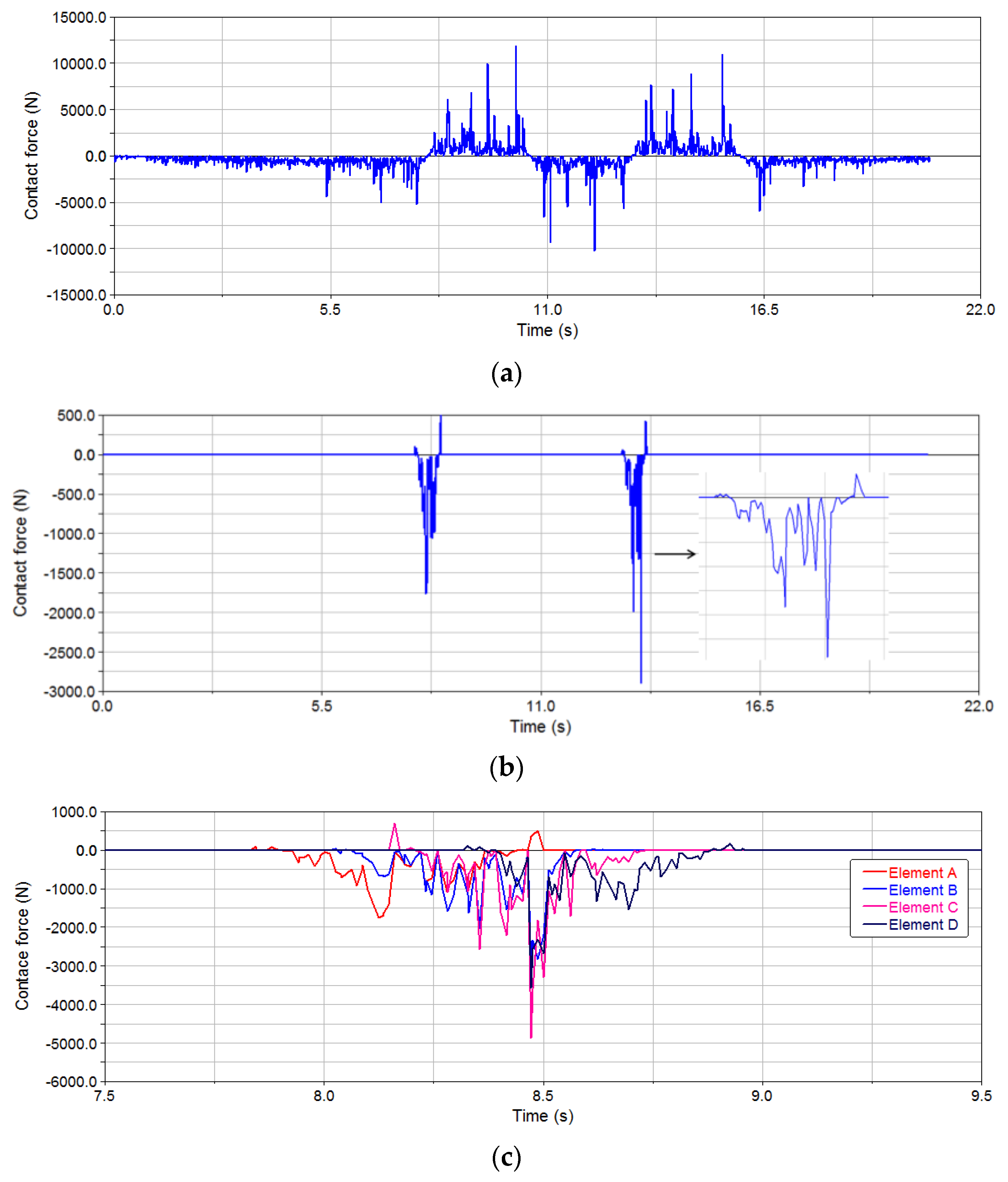
4.3. Rated Load Condition
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Jiang, S.; Huang, S.; Zeng, Q.; Chen, S.; Lv, J.; Zhang, Y.; Qu, W. Dynamic Characteristics of the Chain Drive System under Multiple Working Conditions. Machines 2023, 11, 819. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, J.; Zhu, Z.; Gang, S.; Xiang, L. Crack initiation characteristics of ring chain of heavy-duty scraper conveyor under time-varying loads. Adv. Mech. Eng. 2019, 11, 2072157124. [Google Scholar] [CrossRef]
- Jiang, S.B.; Zeng, Q.L.; Wang, G.; Gao, K.D.; Wang, Q.Y.; Hidenori, K. Contact Analysis of Chain Drive in Scraper Conveyor Based on Dynamic Meshing Properties. Int. J. Simul. Model. 2018, 17, 81–91. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhang, Q.; Xie, F. Dynamic tension test and intelligent coordinated control system of a heavy scraper conveyor. IET Sci. Meas. Technol. 2017, 11, 871–877. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, P.; Li, S. Study on the Fault Diagnosis Method of Scraper Conveyor Gear under Time-Varying Load Condition. Appl. Sci. 2020, 10, 5053. [Google Scholar] [CrossRef]
- Jiang, S.; Lv, R.; Wan, L.; Mao, Q.; Zeng, Q.; Gao, K.; Yang, Y. Dynamic Characteristics of the Chain Drive System of Scraper Conveyor Based on the Speed Difference. IEEE Access 2020, 8, 168650–168658. [Google Scholar] [CrossRef]
- Hieu, L.D.; Temkin, I.O.; Van Tung, L. The application of the fuzzy controller for tension system control of the scraper conveyor in the mines. IOP Conf. Series. Mater. Sci. Eng. 2021, 1159, 12018. [Google Scholar] [CrossRef]
- Li, L.; Cui, H.; Lian, Z.; Wang, Q. Modeling and Optimization of Soft Start-Up for Hydroviscous Drive Applied to Scraper Conveyor. Math. Probl. Eng. 2019, 2019, 131364. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.; Xu, S. Simulation study on speed control of permanent magnet direct-driven system for mining scraper conveyor. Int. J. Eng. Syst. Model. Simul. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Ren, W.J.; Wang, L.; Mao, Q.H.; Jiang, S.B.; Huang, S. Coupling Properties of Chain Drive System under Various and Eccentric Loads. Int. J. Simul. Model. 2020, 19, 643–654. [Google Scholar] [CrossRef]
- Zhang, X.; Li, W.; Zhu, Z.; Ren, W.; Jiang, F. Tension monitoring for the ring chain transmission system using an observer-based tension distribution estimation method. Adv. Mech. Eng. 2017, 9, 2071941813. [Google Scholar] [CrossRef]
- Jiang, S.; Huang, S.; Mao, Q.; Zeng, Q.; Gao, K.; Lv, J. Dynamic Properties of Chain Drive in a Scraper Conveyor under Various Working Conditions. Machines 2022, 10, 579. [Google Scholar] [CrossRef]
- Lu, J.; Yang, R.; Mao, J.; Xie, C. Longitudinal torsional vibrations of the chain drive system of mine scraper conveyor. Sci. Rep. 2023, 13, 9174. [Google Scholar] [CrossRef] [PubMed]
- Dai, K.; Zhu, Z.; Shen, G.; Li, X.; Tang, Y.; Wang, W. Modeling and Adaptive Tension Control of Chain Transmission System With Variable Stiffness and Random Load. IEEE Trans. Ind. Electron. 2022, 69, 8335–8345. [Google Scholar] [CrossRef]
- Jiang, S.B.; Huang, S.; Zeng, Q.L.; Wang, C.L.; Gao, K.D.; Zhang, Y.Q. Dynamic Properties of Chain Drive System Considering Multiple Impact Factors. Int. J. Simul. Model. 2022, 21, 284–295. [Google Scholar] [CrossRef]
- Yuan, P.; He, B.; Zhang, L. Dynamic modelling of an armoured face conveyor considering the curved chains. Eng. Comput. 2023, 40, 1147–1174. [Google Scholar] [CrossRef]
- Rahman, S.U.; Xia, C. Rotor Speed and Position Estimation Analysis of Interior PMSM Machines in Low and Medium-High Speed Regions Adopting an Improved Flux Observer for Electric Vehicle Applications. Machines 2023, 11, 574. [Google Scholar] [CrossRef]
- Liang, J.; Jia, H.; Chen, M.; Kong, L.; Hu, H.; Guo, L. Modeling and Disturbance Compensation Sliding Mode Control for Solar Array Drive Assembly System. Aerospace 2023, 10, 501. [Google Scholar] [CrossRef]
- Qu, P.; Sun, Z.; Li, Q.; Zhang, J.; Liu, P.; Zhou, D. Dynamic Simulation of Multiple Launch Rocket System Marching Fire Based on the Fuzzy Adaptive Sliding Mode Control. Machines 2023, 11, 427. [Google Scholar] [CrossRef]
- Zhao, X.; Kou, B.; Huang, C.; Zhang, L. Optimization Design and Performance Analysis of a Reverse-Salient Permanent Magnet Synchronous Motor. Machines 2022, 10, 204. [Google Scholar] [CrossRef]
- Sheng, L.; Li, W.; Wang, Y.; Fan, M.; Yang, X. Sensorless Control of a Shearer Short-Range Cutting Interior Permanent Magnet Synchronous Motor Based on a New Sliding Mode Observer. IEEE Access 2017, 5, 18439–18450. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.; Xu, S. Composite Sliding Mode Control of a Permanent Magnet Direct-Driven System For a Mining Scraper Conveyor. IEEE Access 2017, 5, 22399–22408. [Google Scholar] [CrossRef]
- Ju, J.; Li, W.; Wang, Y.; Fan, M.; Yang, X. Dynamics and nonlinear feedback control for torsional vibration bifurcation in main transmission system of scraper conveyor direct-driven by high-power PMSM. Nonlinear Dyn. 2018, 93, 307–321. [Google Scholar] [CrossRef]
- Sheng, L.; Li, W.; Jiang, S.; Chen, J.; Liu, A. Nonlinear torsional vibration analysis of motor rotor system in shearer semi-direct drive cutting unit under electromagnetic and load excitation. Nonlinear Dyn. 2019, 96, 1677–1691. [Google Scholar] [CrossRef]
- Chen, J.; Li, W.; Sheng, L.; Jiang, S.; Li, M. Study on reliability of shearer permanent magnet semi-direct drive gear transmission system. Int. J. Fatigue 2020, 132, 105387. [Google Scholar] [CrossRef]
- Li, D.; Wang, S. Characteristics of new permanent magnetic eddy current drive system of the scraper conveyor. J. Eng. 2021, 2021, 552–558. [Google Scholar] [CrossRef]
- Jiang, S.; Ren, W.; Mao, Q.; Zeng, Q.; Yu, P.; Gao, K.; Wang, L. Dynamic Analysis of the Scraper Conveyor under Abnormal Operating Conditions Based on the Vibration and Speed Characteristics. Shock. Vib. 2021, 2021, 8887744. [Google Scholar] [CrossRef]
- Xu, W.; Junejo, A.K.; Liu, Y.; Hussien, M.G.; Zhu, J. An Efficient Antidisturbance Sliding-Mode Speed Control Method for PMSM Drive Systems. IEEE Trans. Ind. Electron. 2021, 36, 6879–6891. [Google Scholar] [CrossRef]
- Shinohara, A.; Inoue, Y.; Morimoto, S.; Sanada, M. Maximum Torque Per Ampere Control in Stator Flux Linkage Synchronous Frame for DTC-Based PMSM Drives Without Using q-Axis Inductance. IEEE Trans. Ind. Appl. 2017, 53, 3663–3671. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Y.; Zhang, X.; Liang, J. A New Reaching Law for Antidisturbance Sliding-Mode Control of PMSM Speed Regulation System. IEEE Trans. Power Electron. 2020, 35, 4117–4126. [Google Scholar] [CrossRef]
- Junejo, A.K.; Xu, W.; Mu, C.; Ismail, M.M.; Liu, Y. Adaptive Speed Control of PMSM Drive System Based a New Sliding-Mode Reaching Law. IEEE Trans. Power Electron. 2020, 35, 12110–12121. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Transmission capacity | 3500 | t/h |
| Length | 330 | m |
| Chain velocity | 0–1.89 | m/s |
| Horizontal inclination of fully mechanized working face | ≤±9 | ° |
| Middle trough size (length × width × height) | 1750 × 1000 × 350 | mm |
| Form of chainring | Double center chain | - |
| Chain specification | 48 × 152 | mm |
| Breaking force | ≥2900 | kN |
| Space of scraper | 912 | mm |
| Parameter | Value | Unit |
|---|---|---|
| Pole pairs number | 4 | - |
| Stator resistance | 0.0238 | Ω |
| Flux linkage | 0.8151 | Wb |
| Rotational inertia | 4.165 | kg·m2 |
| Viscosity coefficient | 0.005 | N·m·s |
| D-axis inductance | 0.0143 | H |
| Q-axis inductance | 0.042 | H |
| Rated speed | 750 | r/min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Ren, M.; Wang, H.; Jin, L. Simulation Study on Dynamic Characteristics of the Chain Drive System for Mining Scraper Conveyor Driven by the Permanent Magnet Synchronous Motor. Processes 2024, 12, 165. https://doi.org/10.3390/pr12010165
Zhang X, Ren M, Wang H, Jin L. Simulation Study on Dynamic Characteristics of the Chain Drive System for Mining Scraper Conveyor Driven by the Permanent Magnet Synchronous Motor. Processes. 2024; 12(1):165. https://doi.org/10.3390/pr12010165
Chicago/Turabian StyleZhang, Xi, Mingming Ren, Hongju Wang, and Lei Jin. 2024. "Simulation Study on Dynamic Characteristics of the Chain Drive System for Mining Scraper Conveyor Driven by the Permanent Magnet Synchronous Motor" Processes 12, no. 1: 165. https://doi.org/10.3390/pr12010165