
Nonlinear Predictive Control of Diesel Engine DOC Outlet Temperature

Abstract
1. Introduction
2. Materials and Methods
2.1. DOC System Description
2.2. DOC System Model Building
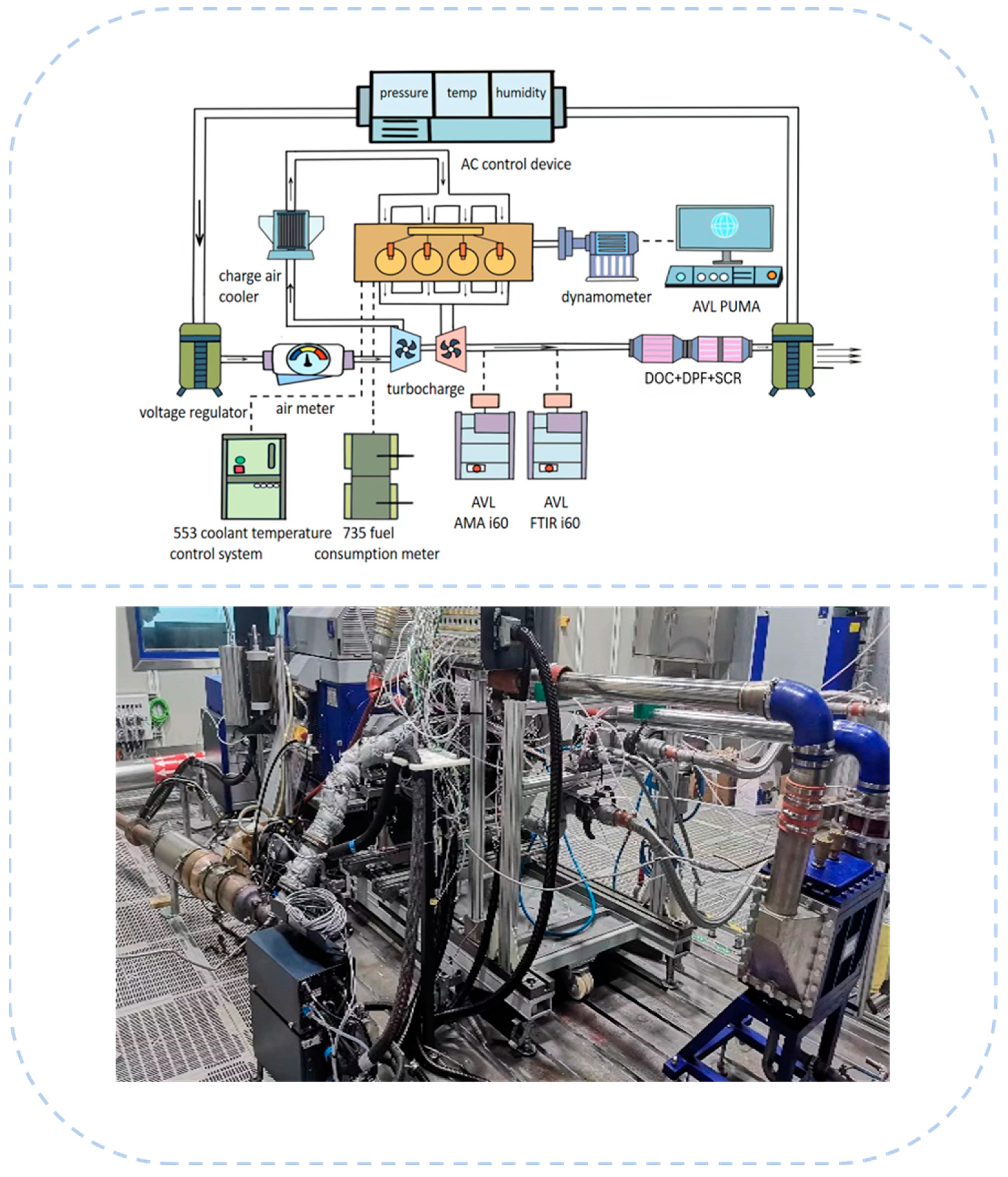
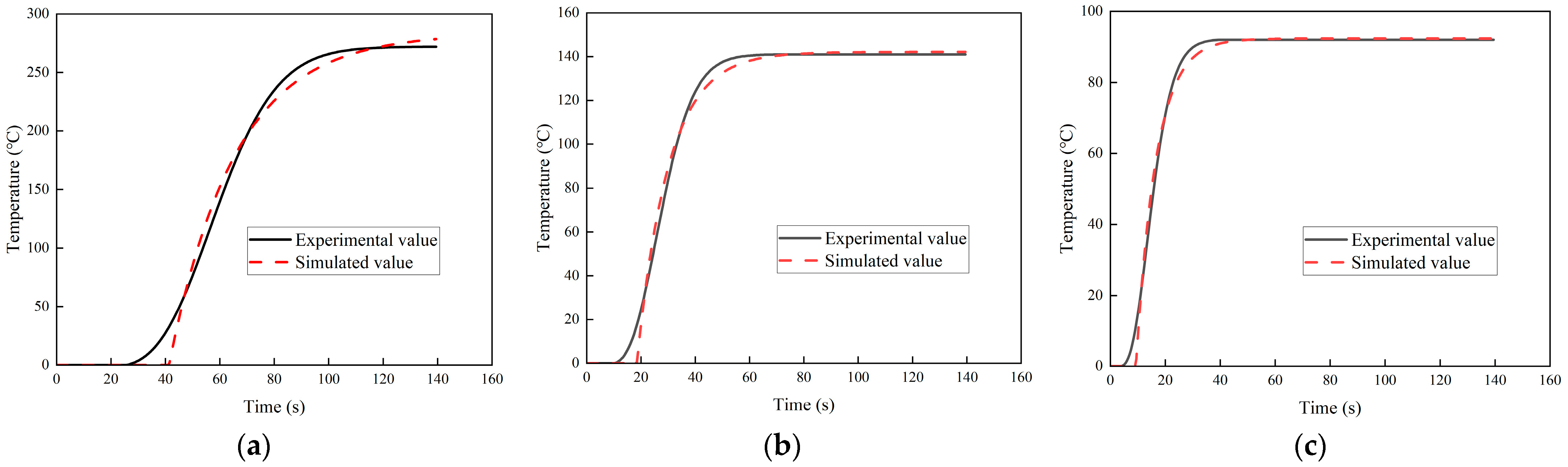
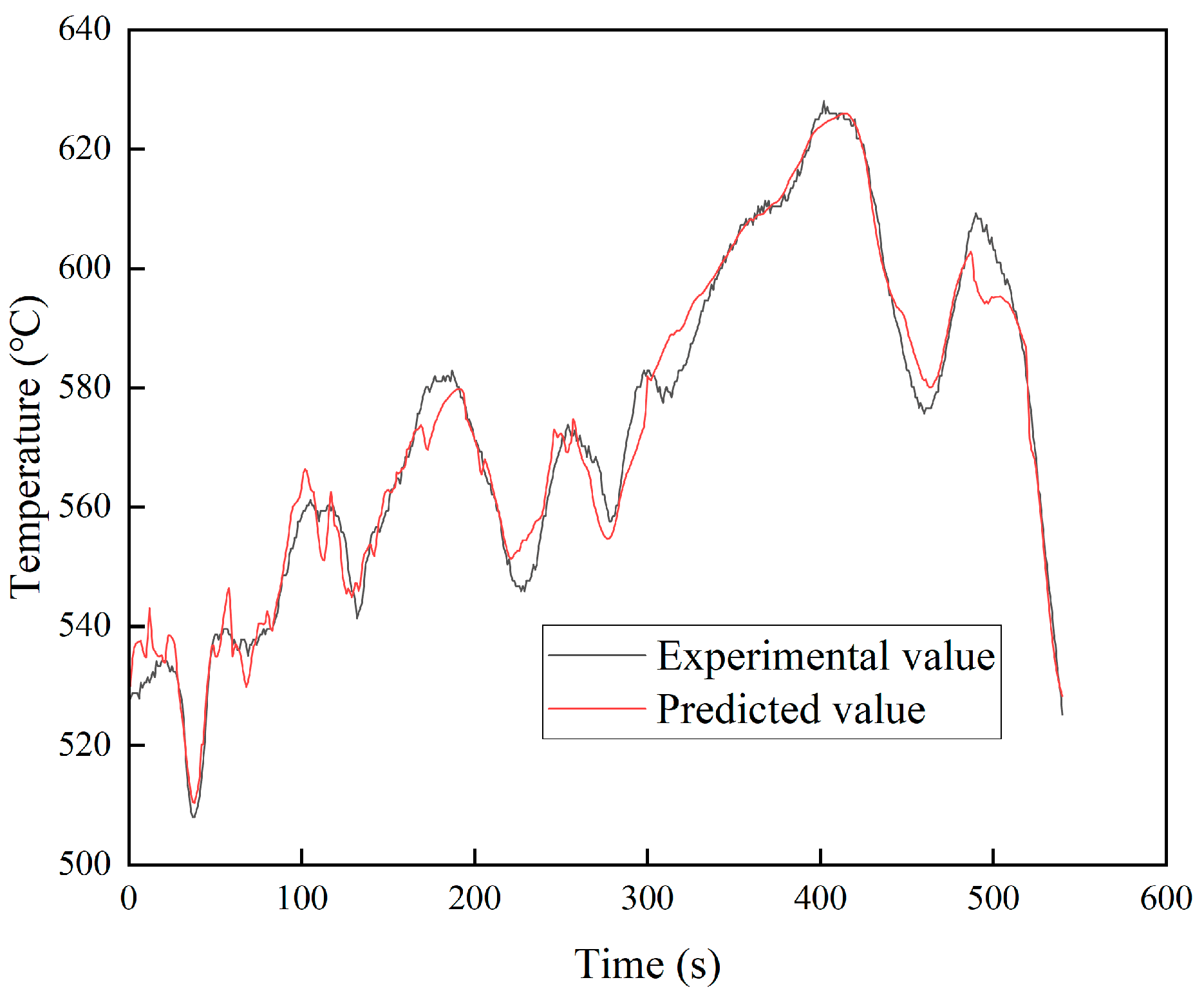
2.3. Experimental Equipment and Model Identification
3. Predictive Control Based on LSTM Neural Network Model
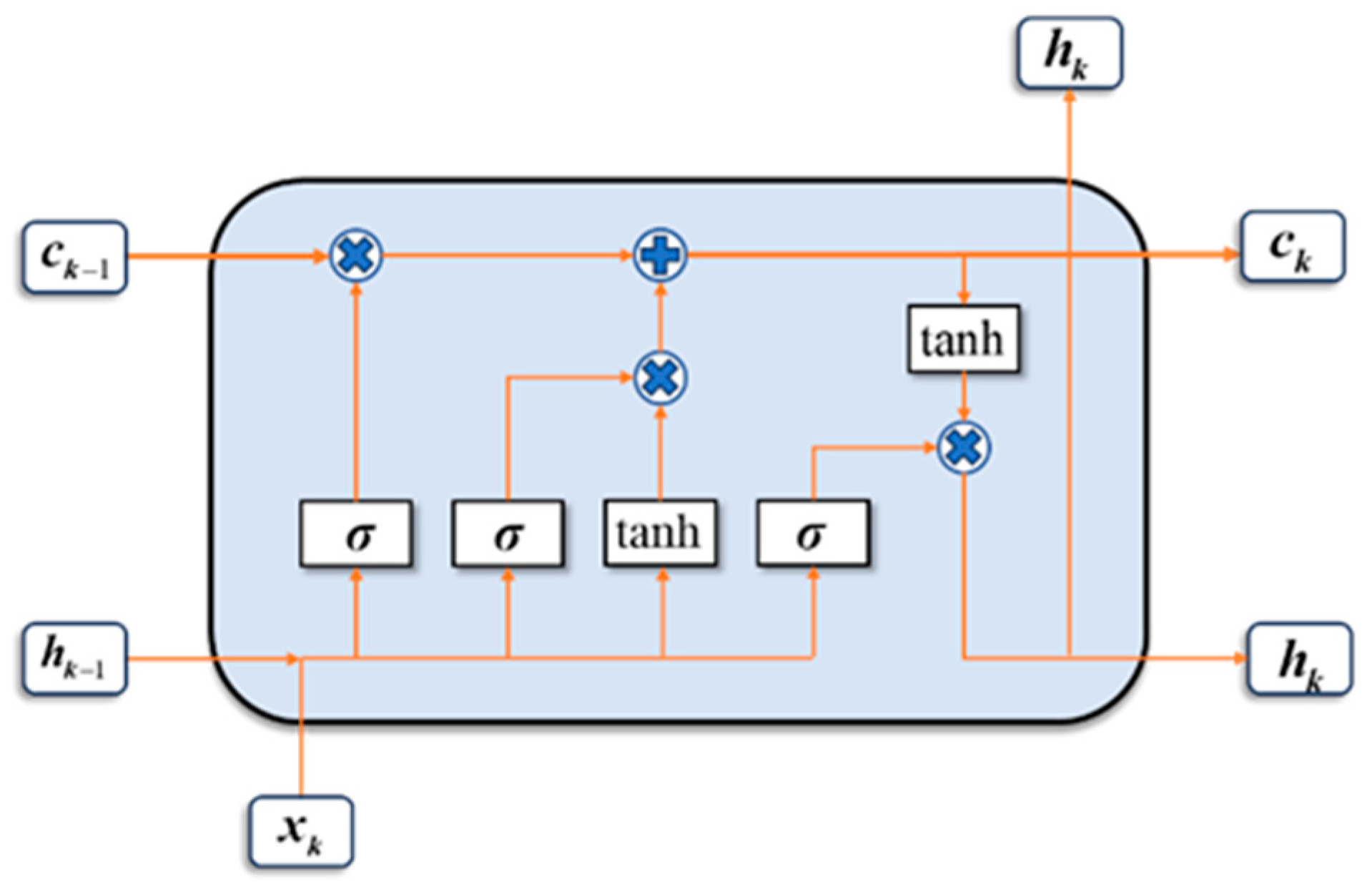
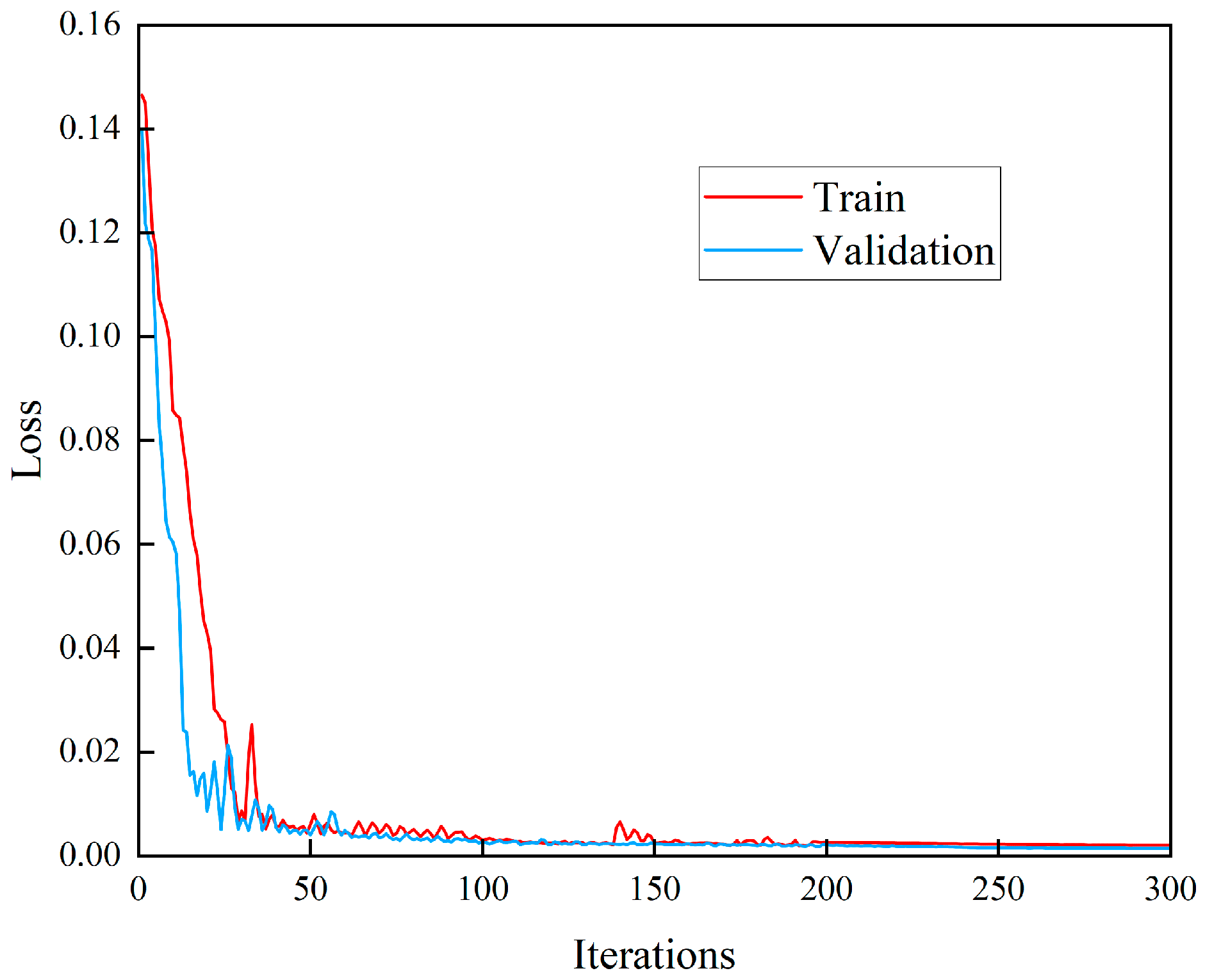
3.1. DOC Outlet Temperature Prediction Model Based on LSTM Neural Network
3.2. Reference Trajectory and Feedback Correction
3.3. Optimization Solution Based on Gradient Descent Method
4. Simulation Experiment and Result Analysis
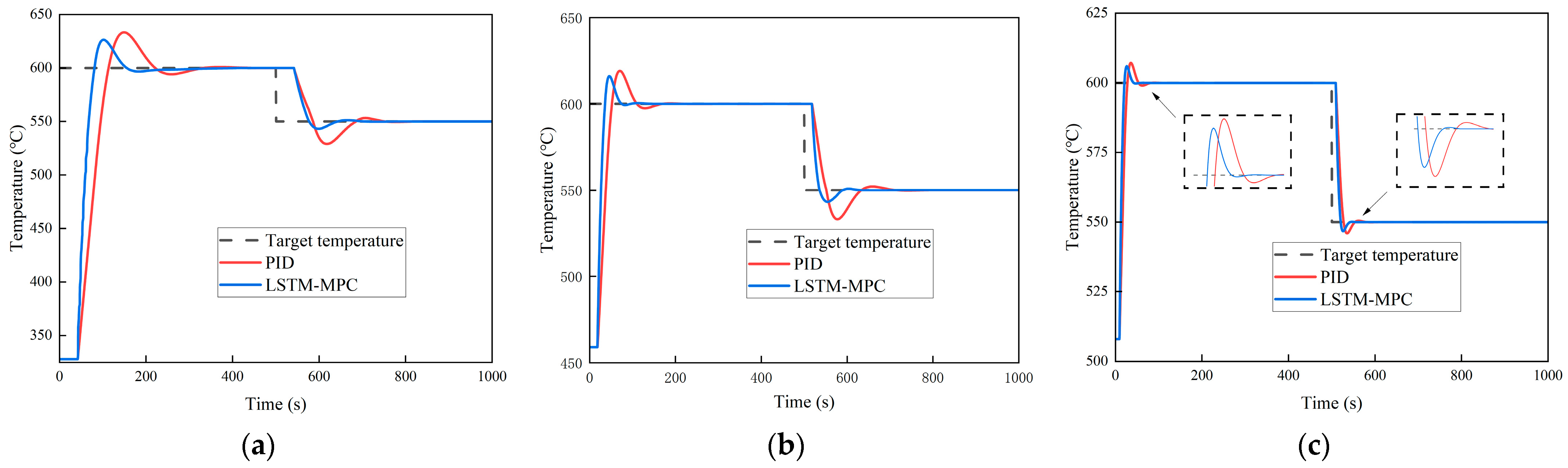
4.1. Setpoint Tracking Performance Experiment
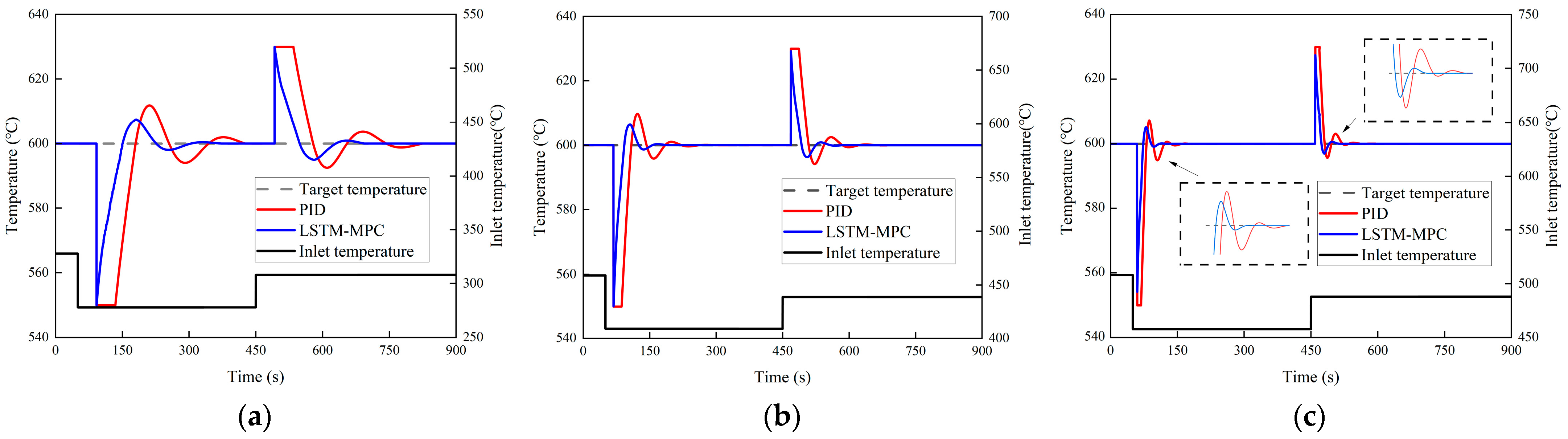
4.2. Disturbance Rejection Performance Simulation Experiment
5. Conclusions
- (1)
- LSTM-MPC employs the gradient descent algorithm to solve nonlinear optimization problems, aiming to reduce the computational time for optimization solutions and achieve optimal control rates for fuel injection heating.
- (2)
- LSTM-MPC is compared with PID control in terms of tracking performance and disturbance rejection capability through simulation. In the set point tracking experiment, the average time to first reach the set temperature is reduced by 14.61 s, the average overshoot is reduced by 35.9%, and the average time to reach the steady state is reduced by 36.23 s. In the experiment of anti-interference performance, the average overshoot is reduced by 33.89%, and the average time to reach the stable state is reduced by 60.04 s. The results indicate that this control strategy exhibits fast response, good tracking performance, and strong disturbance rejection capabilities. Additionally, the strategy can effectively reduce the influence of time delay on the system, and its theoretical control effect in the DOC outlet temperature control process is proved by simulation experiments. We will further verify its control effect in engineering applications in future work.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Johnson, T. Vehicular emissions in review. SAE Int. J. Engines 2016, 9, 1258–1275. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, S.; Hao, J.; Liu, H.; Wu, X.; Hu, J.; Walsh, M.P.; Wallington, T.J.; Max Zhang, K.; Stevanovic, S. On-road vehicle emissions and their control in China: A review and outlook. Sci. Total Environ. 2017, 574, 332–349. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wu, Q.; Liu, J.; Yang, H.; Yin, M.; Chen, S.; Guo, P.; Ren, J.; Luo, X.; Linghu, W.; et al. Vehicle emission and atmospheric pollution in China: Problems, progress, and prospects. PeerJ 2019, 7, e6932. [Google Scholar] [CrossRef] [PubMed]
- Ayodhya, A.S.; Narayanappa, K.G. An overview of after-treatment systems for diesel engines. Environ. Sci. Pollut. Res. 2018, 25, 35034–35047. [Google Scholar] [CrossRef] [PubMed]
- Reşitoğlu, İ.A.; Altinişik, K.; Keskin, A. The pollutant emissions from diesel-engine vehicles and exhaust aftertreatment systems. Clean Technol. Environ. Policy 2015, 17, 15–27. [Google Scholar] [CrossRef]
- Kurien, C. Review on post-treatment emission control technique by application of diesel oxidation catalysis and diesel particulate filtration. J. Therm. Eng. 2019, 5, 108–118. [Google Scholar] [CrossRef]
- Lao, C.T.; Akroyd, J.; Eaves, N.; Smith, A.; Morgan, N.; Nurkowski, D.; Bhave, A.; Kraft, M. Investigation of the impact of the configuration of exhaust after-treatment system for diesel engines. Appl. Energy 2020, 267, 114844. [Google Scholar] [CrossRef]
- Zhang, Z.; Dong, R.; Lan, G.; Yuan, T.; Tan, D. Diesel particulate filter regeneration mechanism of modern automobile engines and methods of reducing PM emissions: A review. Environ. Sci. Pollut. Res. 2023, 30, 39338–39376. [Google Scholar] [CrossRef]
- Shi, Y.; Lu, Y.; Cai, Y.; He, Y.; Zhou, Y.; Fang, J. Evolution of particulate matter deposited in the DPF channel during low-temperature regeneration by non-thermal plasma. Fuel 2022, 318, 123552. [Google Scholar] [CrossRef]
- Rothe, D.; Knauer, M.; Emmerling, G.; Deyerling, D.; Niessner, R. Emissions during active regeneration of a diesel particulate filter on a heavy duty diesel engine: Stationary tests. J. Aerosol Sci. 2015, 90, 14–25. [Google Scholar] [CrossRef]
- Liu, G.; Liu, W.; He, Y.; Gong, J.; Li, Q. Research on influence of exhaust characteristics and control strategy to DOC-assisted active regeneration of DPF. Processes 2021, 9, 1403. [Google Scholar] [CrossRef]
- Bai, S.; Chen, G.; Sun, Q.; Wang, G.; Li, G.X. Influence of active control strategies on exhaust thermal management for diesel particular filter active regeneration. Appl. Therm. Eng. 2017, 119, 297–303. [Google Scholar] [CrossRef]
- Lapuerta, M.; Rodríguez-Fernández, J.; Oliva, F. Effect of soot accumulation in a diesel particle filter on the combustion process and gaseous emissions. Energy 2012, 47, 543–552. [Google Scholar] [CrossRef]
- Wan, M.; Xiao, B.; Bi, Y.; Tang, C.; Shen, L.; Lei, J. Experimental study on temperature characteristics of DPF substrate for active regeneration in plateau environment. Trans. Chin. Soc. Agric. Eng. 2020, 36, 121–128+328. [Google Scholar]
- Liu, H.; Zhang, K.; Yao, G.; Zhang, W.; Zi, X. A Research on DOC Assisted DPF Regeneration Technology with In-cylinder Fuel Post-Injection and Exhaust-pipe Fuel Injection. Automot. Eng. 2015, 37, 391–395. [Google Scholar]
- Lepreux, O.; Creff, Y.; Petit, N. Model-based control design of a diesel oxidation catalyst. IFAC Proc. Vol. 2009, 42, 279–284. [Google Scholar] [CrossRef]
- Su, C.; Brault, J.; Munnannur, A.; Liu, Z.G.; Milloy, S.; Harinath, A.; Dunnuck, D.; Federle, K. Model-based approaches in developing an advanced aftertreatment system: An overview. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 1, 201–214. [Google Scholar] [CrossRef]
- Guardiola, C.; Pla, B.; Piqueras, P.; Mora, J.; Lefebvre, D. Model-based passive and active diagnostics strategies for diesel oxidation catalysts. Appl. Therm. Eng. 2017, 110, 962–971. [Google Scholar] [CrossRef]
- Regaya, C.B.; Farhani, F.; Zaafouri, A. Adaptive proportional-integral fuzzy logic controller of electric motor drive. Eng. Rev. 2021, 41, 26–40. [Google Scholar] [CrossRef]
- Regaya, C.B.; Zaafouri, A.; Chaari, A. A new sliding mode speed observer of electric motor drive based on fuzzy-logic. Acta Polytech. Hung. 2014, 11, 219–232. [Google Scholar]
- Regaya, C.B.; Farhani, F.; Zaafouri, A.; Chaari, A. High-performance control of IM using MRAS-fuzzy logic observer. Int. J. Tomogr. Simul. 2017, 30, 40–52. [Google Scholar]
- Regaya, C.B.; Farhani, F.; Hamdi, H.I.C.H.E.M.; Zaafouri, A.; Chaari, A. Robust ANFIS vector control of induction motor drive for high-performance speed control supplied by a photovoltaic generator. WSEAS Trans. Syst. Control 2020, 15, 356–365. [Google Scholar] [CrossRef]
- Kim, Y.W.; Van Nieuwstadt, M.; Stewart, G.; Pekar, J. Model predictive control of DOC temperature during DPF regeneration. SAE Tech. Pap. 2014, 1, 1165. [Google Scholar]
- Huang, T.; Hu, G.; Meng, Z.; Zeng, D. Exhaust temperature control for safe and efficient thermal regeneration of diesel particulate filter. Appl. Therm. Eng. 2021, 189, 116747. [Google Scholar] [CrossRef]
- Caliskan, H.; Mori, K. Environmental, enviroeconomic and enhanced thermodynamic analyses of a diesel engine with diesel oxidation catalyst (DOC) and diesel particulate filter (DPF) after treatment systems. Energy 2017, 128, 128–144. [Google Scholar] [CrossRef]
- Lepreux, O.; Creff, Y.; Petit, N. Model-based temperature control of a diesel oxidation catalyst. J. Process Control 2012, 22, 41–50. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, B.; Yao, D.; Yang, Y. Modeling and Order Reduction for the Thermodynamics of a Diesel Oxidation Catalyst with Hydrocarbon Dosing. Catalysts 2019, 9, 369. [Google Scholar] [CrossRef]
- Liu, H.; Gao, Y.; Ma, B.; Li, F.; Yin, Y.; Xie, T. Investigation on Temperature Control of Diesel Oxidation Catalyst Outlet. Trans. Chin. Soc. Agric. Mach. 2018, 49, 387–392. [Google Scholar]
- Huang, T.; Hu, G.; Yan, Y.; Zeng, D.; Meng, Z. Combined feedforward and error-based active disturbance rejection control for diesel particulate filter thermal regeneration. ISA Trans. 2023, 134, 28–41. [Google Scholar] [CrossRef]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Chen, P.; Wang, J. Nonlinear model predictive control of integrated diesel engine and selective catalytic reduction system for simultaneous fuel economy improvement and emissions reduction. J. Dyn. Syst. Meas. Control 2015, 137, 081008. [Google Scholar] [CrossRef]
- Lu, C.H. Wavelet fuzzy neural networks for identification and predictive control of dynamic systems. IEEE Trans. Ind. Electron. 2011, 58, 3046–3058. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Numerical Value |
|---|---|
| Diesel engine type | 4-cylinder inline, 4 valves, turbocharged |
| Bore × Stroke (mm × mm) | 92 × 94 |
| Displaced volume (L) | 2.5 |
| Compression ratio | 17.5:1 |
| Maximum torque (N·m) | 400 |
| Rated speed (r/min) | 3000 |
| Power rating (kW) | 120 |
| Parameter Type | Numerical Value |
|---|---|
| DOC Substrate | Cordierite |
| Length (mm) | 152.4 |
| Diameter (mm) | 122 |
| Cell density (cpsi) | 400 |
| Speed (r/min) | Torque (N·m) | k | Tc | τ | Accuracy (%) |
|---|---|---|---|---|---|
| 1200 | 50 | 944.91 | 24.223 | 41.331 | 92.52 |
| 1800 | 150 | 394.78 | 11.677 | 18.462 | 93.15 |
| 2400 | 250 | 384.8 | 7.3513 | 9.3265 | 93.33 |
| Name | Numerical Value |
|---|---|
| Optimizer | Adam |
| Activation function | Sigmoid, tanh |
| Maximum iterations | 300 |
| Gradient decay rate | 0.99 |
| Learning rate decline cycle | 175 |
| Initial learning rate | 0.05 |
| Learning rate decline coefficient | 0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, X.; Wang, Y.; Wang, G.; Shen, Q.; Zeng, B.; He, S. Nonlinear Predictive Control of Diesel Engine DOC Outlet Temperature. Processes 2024, 12, 225. https://doi.org/10.3390/pr12010225
Yu X, Wang Y, Wang G, Shen Q, Zeng B, He S. Nonlinear Predictive Control of Diesel Engine DOC Outlet Temperature. Processes. 2024; 12(1):225. https://doi.org/10.3390/pr12010225
Chicago/Turabian StyleYu, Xuan, Yuhua Wang, Guiyong Wang, Qianqiao Shen, Boshun Zeng, and Shuchao He. 2024. "Nonlinear Predictive Control of Diesel Engine DOC Outlet Temperature" Processes 12, no. 1: 225. https://doi.org/10.3390/pr12010225
APA StyleYu, X., Wang, Y., Wang, G., Shen, Q., Zeng, B., & He, S. (2024). Nonlinear Predictive Control of Diesel Engine DOC Outlet Temperature. Processes, 12(1), 225. https://doi.org/10.3390/pr12010225